
Abstract
Motivated by an efficient broadcast service in vehicular ad hoc networks (VANETs), we propose a TDMA-based channel access scheme for IEEE 802.11p control channel (CCH). The scheme reduces the rate of transmission collisions and improves the availability of time slots on the control channel by adjusting disjoint sets of time slots to vehicles moving in opposite directions and to the left and right slot frames. Further, the location information of a node is used to allocate the time slot, which efficiently decreases the rate of access collisions. Analysis and simulation results in city scenarios are presented to evaluate the performance of our scheme, which reduces significantly the transmission conflict and has shorter time delay than ADHOC and VeMAC.
1. Introduction
Driven by road safety requirements and intelligent traffic control, VANETs have been attracting significant interest in both academia and industry. VANETs are distributed, self-organizing communication networks built up by moving vehicles, which contain both intervehicle (V2V) communications between vehicles and vehicle-to-roadside (V2R) communications between vehicles and roadside units (RSUs). Based on the above two kinds of communications, VANETs can support many applications which can be divided into two major categories: safety and nonsafety [1]. VANETs have significantly different characteristics compared to other wireless and mobile networks such as high speed and unpredictable topology, so these networks present a very active field of research, development, standardization, and field trials.
In spite of the ongoing academic and industrial research efforts on vehicular networks, many research challenges remain. Among them is the design of medium access control (MAC) protocols that can make best use of DSRC multichannel architecture. IEEE 802.11p [2] is specifically designed to support vehicular network applications, which defines the general framework for multichannel management. It adopts the split phase model to coordinate multiple channels [3], which are seven 10 MHz channels, six service channels (SCHs), and one control channel (CCH) in Dedicated Short Range Communications (DSRC) spectrum, which is shown in Figure 1. Channel access time is divided into synchronized intervals with a length of 100 ms, which contains the intervals of CCH and SCH, 50 ms of each. During CCH interval, all the devices have to monitor CCH. And when SCH interval arrives, devices can optionally switch to SCHs, which are used for nonsafety applications.
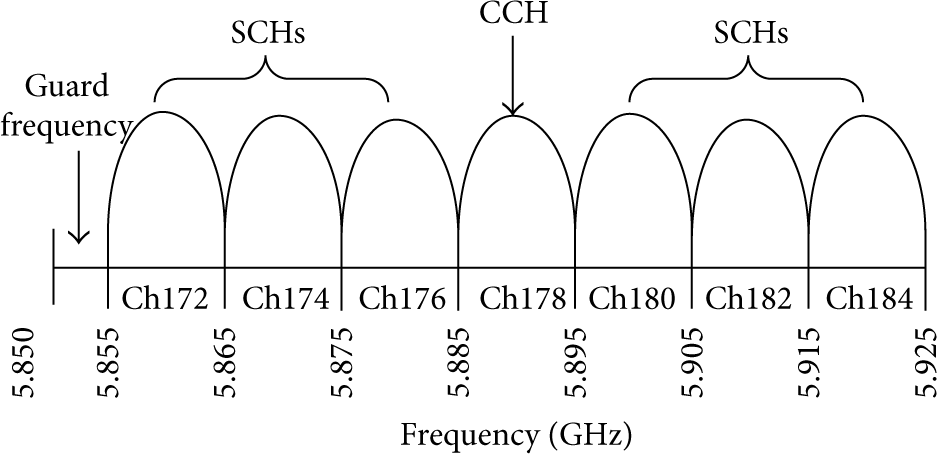
DSRC spectrum band and channels.
CCH and SCHs have different roles. CCH is mainly for transmitting high priority short messages especially for control information to determine in which time slot the nodes can be accessed on the CCH and SCHs. SCHs are severed for safety or nonsafety application messages. Thus, different levels of messages are transmitted in different channels. Each node has two transceivers: one always operating over CCH and the other operating over one of the six SCHs. It is generally believed that the transmission power levels on the CCH and SCHs are fixed and known to all nodes.
Although the IEEE 802.11p employed the enhanced distributed channel access (EDCA) scheme, it also increases the probability of collisions when multiple nodes within the same communication range are simultaneously trying to broadcast their safety messages [4, 5]. More research is going on for MAC protocols for vehicular networks especially concerning control channel access scheme based on TDMA. ADHOC MAC [6], in which each node can access the channel at least once in each frame, is proposed for VANETs to support reliable broadcast service without the hidden terminal problem. However, the rate of transmission collision is high due to node mobility and the fixed length of CCH interval. Wang et al. have confirmed that the fixed length of CCH interval has limitations in improving the performance in the WAVE system [7]. So Wang et al. [8] proposed a Variable CCH Interval (VCI) MAC protocol which can optimize the intervals based on the average time of reservation for service packet in CCH interval. To increase the success rate of channel reservation and avoid the hidden terminal problem, a Distributed Channel Assignment Scheme (DCAS) is proposed by Chu et al. [9]. However, they did not consider the bandwidth waste problem caused by channel switching. To decrease the rate of transmission collision, a multichannel TDMA MAC protocol [10], called VeMAC, is proposed to support the high priority safety applications in VANETs. A fixed time slot of the control channel is assigned for each node, which limits the number of vehicles that could be accommodated within the system. However, the number of the frame and the length of each time slot are constant in VeMAC, which will cause that there are not enough available time slots to access in the situation of high dense of nodes and the availability of time slots is low in the case of sparse nodes.
In this paper, we propose a TDMA-based channel access scheme for IEEE 802.11p control channel (CCH). The scheme reduces the rate of transmission collisions and improves the availability of time slots on the control channel by adjusting disjoint sets of time slots to vehicles moving in opposite directions and to the left and right slot frames. Further, the location information of a node is used to allocate the time slot, which efficiently decreases the rate of access collisions.
The organization of this paper is as follows. We present the system model in Sections 2 and 3 briefly describes the dynamic slot allocation according to the vehicle density and presents the channel access mechanism in detail. Then the performance analysis is shown in Section 4. Finally, Section 5 concludes this work.
2. System Model
Consider the scenario that a set of vehicles move in opposite directions on two-way vehicle traffic roads and some Road Side Units (RSUs) are deployed [10]. For convenience, we define a vehicle moving in a left (right) direction if it is currently heading to any direction from north/south to west (east), shown in Figure 2.

Partitioning of each frame into L and R sets.
The channel time is partitioned into frames consisting of a number of time slots, and the numbers of time slots can vary dynamically (double or halve) with the node density, while the length of the slot is set. These time slots are divided into two sets: L and R, which are associated with the moving directions, respectively. Due to the smaller numbers of the local RSUs in VANET, we take RSUs as normal nodes, and the direction is defined as the same with the nearest vehicle on the road.
Each vehicle is equipped with a GPS receiver which can precisely determine its direction and location. The GPS receiver can also provide the time synchronization among nodes by using its 1PPS signal, which is used as a common time reference among all nodes. Thus, all the channels' slots are synchronized. In this way, each node can acquire the index of the current slot within a frame on any channel and whether it belongs to the L or R set on the control channel at any time.
3. The Channel Access Scheme
3.1. Preliminaries
For a given node x, the following some sets are defined:
3.2. The Frame Structure
Consider the frame in our TDMA scheme as a Round-Robin structure, which means without the start and end. Specially, a “forward” direction is defined. As described above, each frame is divided into L and R sets of time slots, in which all of the available frequency spectra could be used. In each transmission, a node must acquire the exclusive right for a special time slot. Once a time slot has been acquired, the node stops accessing the slots in all subsequent frames in CCH until a transmission collision is detected. Each packet transmitted in a slot for CCH is divided into two main fields: basic information and high priority short application. Basic information on the CCH is divided into six main fields: ID, direction, location, request (CR), response (RAck), and

The frame structure.
Besides the MAC address, each node is identified by a short identifier (ID). ID is chosen by each node randomly. To guarantee its uniqueness, the ID will be changed whenever the node detects that it has been used by another node [11]. The ID is contained in the header of each packet when transmitting on CCH. The direction is current traveling direction of vehicle, labeled L or R in this filed. Location is obtained by the GPS receiver. CR is the basic information of the node requesting service channel, including the service channel (may be sets of node x occupied several service channels in point-to-point communication), channel time (or the start-end time), and the basic information of the destination node information or broadcast service. RAck is the acknowledgement of destination node responding to the request of the source node or the provider to receivers. If former, the response information should contain the SCH which will be used (the optimal service channel from the SCHs provided by in CR information).
Control information in the basic information fields is necessary to decide which time slots the node should access on the CCH and SCHs. In the process of time slot assignment on the CCH, because the nodes acquire time slots in a distributed way, the transmitted packets should contain all the basic information. The details of time slots assignment on the CCH will be explained in the following subsections.
3.3. Adjusting the Frame Length and the Ratio
Consider some principles of changing the frame length, and let
With the nodes moving, there are always nodes joining or leaving the network. When meeting the following (1) or (2), the node x will adjust the ratio to meet formula (3) between the left and right slots. Then x updates the new allocation scheme on CCH; others with the same length of frame will use the new ratio



By using the binary tree algorithm, the frame length can be doubled or halved, as shown in Figure 4.

Changing frame length based on binary tree.
Let D denote
Adjust the slot set to let Adjust the slot set to let No change Assignment slot Assignment slot No change
The analysis presented in the dynamically adjust of the length of frames is verified in [12]. When the node density is low, the frame length is shortened to reduce the idle slots and improve the channel utilization; on the contrary, when the node density is high, the frame length is doubled to ensure each node access efficiently. Thus there are enough time slots for nodes to access the network.
3.4. Channel Access
When node x is just powered on and just needs to access a time slot, it begins to listen to the channel for
Suppose the nodes in the same direction can gain their own orders and each node knows its neighbors and slot numbers of its neighbors. To begin with, node x calculates the nearest node y in the same direction. Then node x determines the order with node y and chooses the nearest number of slot j occupied by y to contend. In the case that multiple nodes access the network, each node has a corresponding effective time slot according to the relative location between nodes. The scheme is described as follows.
Step 1. Node x determines its moving direction by its GPS and chooses the corresponding direction time slot set L or R.
Step 2. Node x listens to its neighbor nodes' information (position, direction, and the slot occupied in a cycle) and builds an AVAILABLE (a new node is free to contend for this slot) slot set
Step 3. Node x gets node
If only node x attempts to acquire time slot k, access collision does not happen. In this case, the process is successful and each one-hop neighbor y of node x adds node x to the set
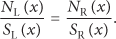
In the ideal scenario, the order of slot numbers of all nodes occupied is consistent with the order of position in the same direction, while in the actual environment, the situation will be different. The difference of nodes speed and idle slots leads to the inconsistent order. An example is as follows.
Figure 5 shows the process of nodes to contend for slots. Nodes x and f access the channel simultaneously, and x chooses the left depicted by the gray part, while f chooses the right. As shown in the figure, the available slot set of node x is
The process of nodes contend slots.
4. Performance Analysis
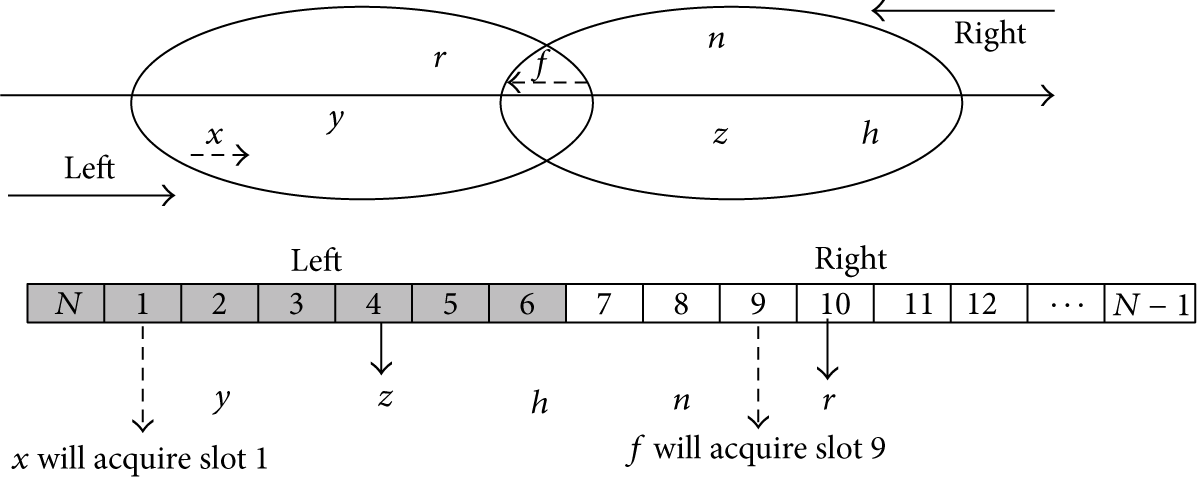
Suppose that K nodes simultaneously contend N time slots. In the beginning, each node decides which available slot it will contend and thus directly chooses its slot when competition cycle is coming. If there are more than two nodes to contend the same slot, the nodes fail, and they have to wait for the next cycle and repeat the above process.
Let S be the successful node numbers the successful probability of every node


The probability of success for one node.
4.1. Time Slot Acquisition
Considering K contending nodes, each of which needs to acquire a time slot on the CCH. The following metrics should be obtained to evaluate the performance: the average number of nodes which acquire time slots within n frames, the probability that a certain node acquires a time slot within n frames, and the probability that all the nodes acquire a time slot within n frames.
To simplify the analysis, some assumptions are made [10]: (a) all the contending nodes belong to the same one-hop communication range, with the same
Let N be the number of initially available time slots and

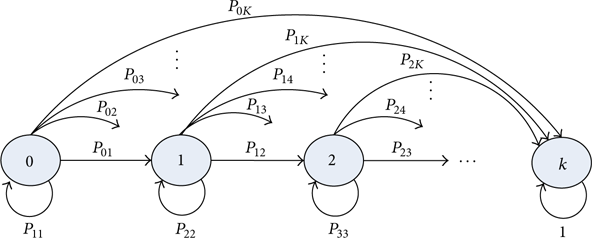
Markov chain for
Matrix of transition probability is as follows:





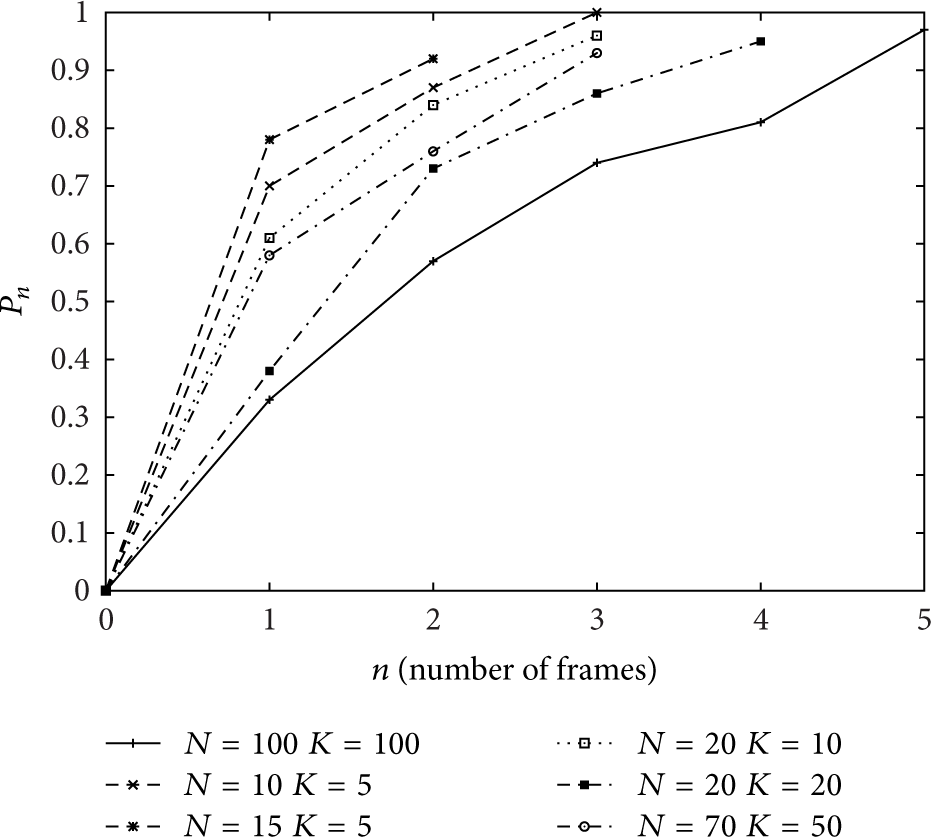
The proportion all nodes acquire a time slot within n frames.
4.2. Channel Access Interval
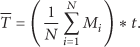
In the condition that the node has one slot in a frame, the channel access interval is the duration of a frame. If the frame length is fixed, its duration is expressed as
4.3. Access Fairness
The fairness means that every node has the same opportunity to access channel and equal resources. We take the probability of access channel as the evaluation metric, which presents the ratio of the minimum probability to the maximum probability:


Fairness simulation data.

From the data analysis shown in Table 1, the fairness index I in our time slot allocation mechanism can reach more than 0.75 when the node numbers are the same as the slot number.
We can also define the fairness based on how many nodes of wireless channel resources allocated in the CCH. In the two-top subnet work

4.4. Simulation
Simulation scene is a four horizontal and vertical urban grid topology for two-way traffic streets [10]. The horizontal and vertical streets are evenly distributed among the four identical squares blocks. All the streets have the same size. The speed of each vehicle is subject to a normal distribution. When one vehicle arrived in the intersection area, it has equal probability to move to any directions. (Vehicles are not allowed to leave the simulation area in the simulation time.) The vehicles located at intersections can communicate with all vehicles except for other streets because city modules block the wireless signal.
Table 2 summarizes the simulation parameters and Figure 9 shows the simulated area in the city scenario, where the black and white dots are on behalf of vehicles moving in opposite directions.
Simulation parameters.


Scenario of the simulated area of the city.
In Figure 10, it is clear that when
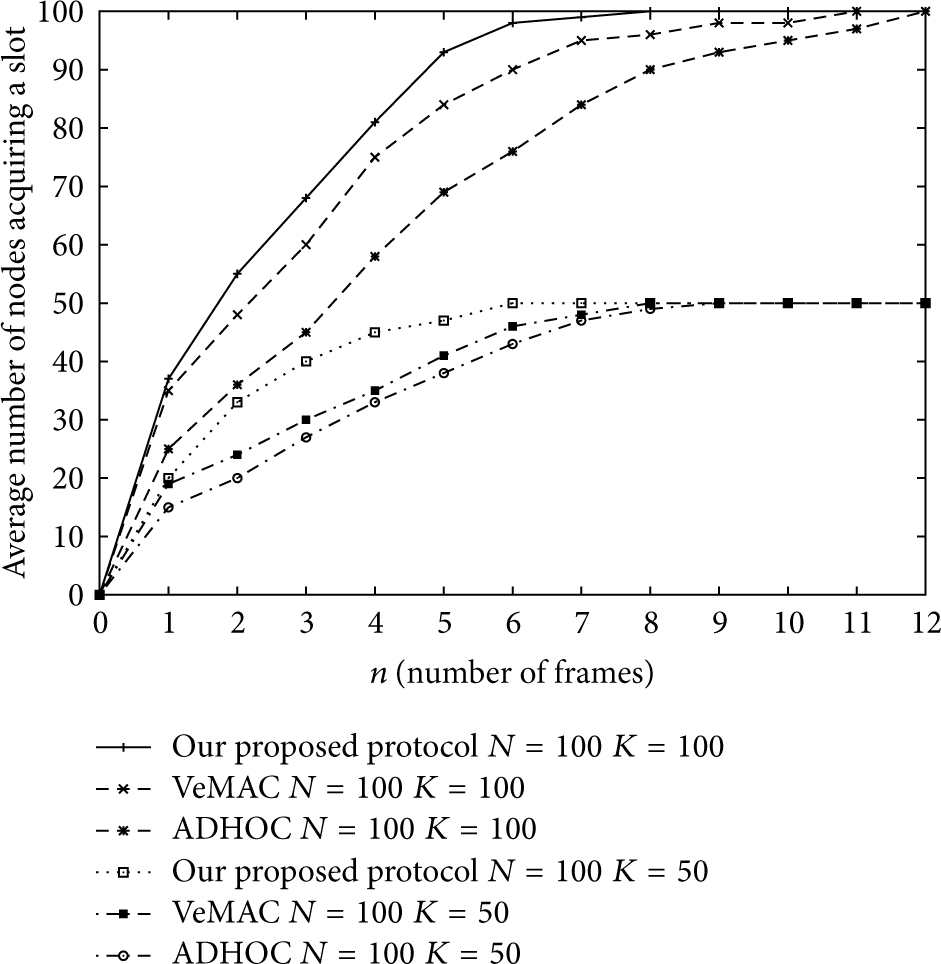
Average number of nodes acquiring a slot within n frames.
Figure 11 shows the analysis results and simulation results with different values of N and K. The solid line represents the simulation results, while the dotted line represents the analysis results. We can see the analysis results are very close to the simulation results for different K and N.
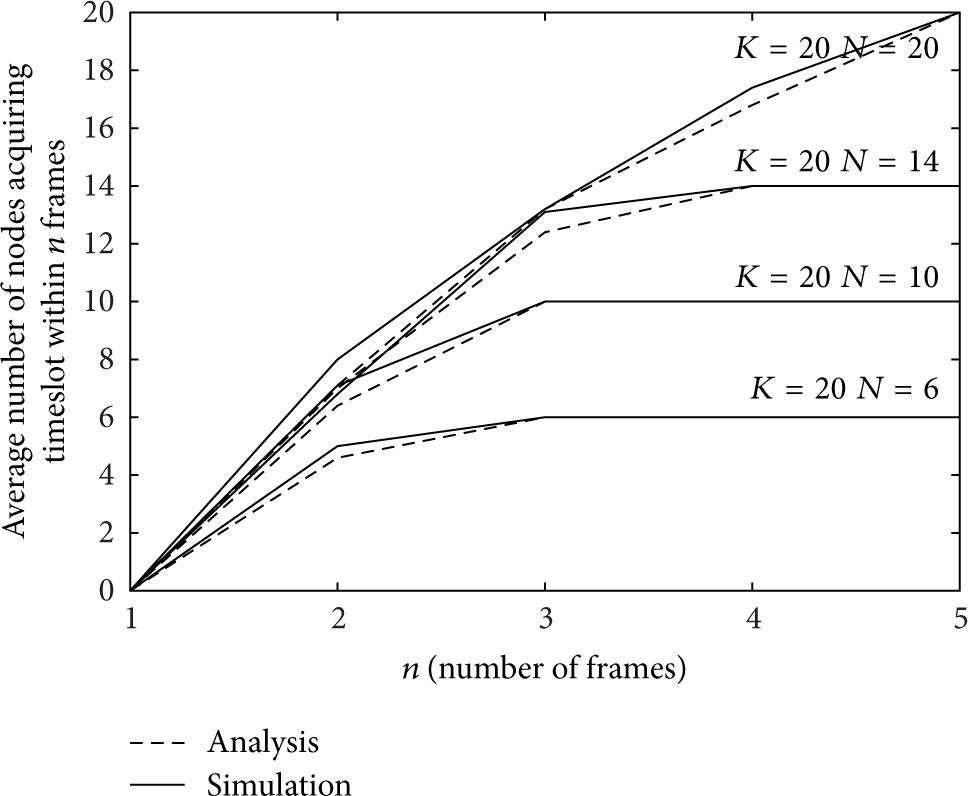
Average number of nodes acquiring a time slot within n frames.
Figure 12 shows the collision nodes number in a time slot for ADHOC, VeMAC, and our protocol in a period of simulation time. We can see the collision number of our protocol could be reduced by about 70% compared to ADHOC and 50% compared to VeMAC. So our protocol has the minimum number of the nodes conflicts and maximum channel utilizations comparing with the several existing MAC protocols.

The number of collision slots.
We come to the conclusion that our protocol can provide a dynamic and adaptive frame length according to the nodes density, which means that nodes will benefit from considerable response time reduction in sparse areas, and in dense area we can cope with arbitrarily large number of nodes with little additional time overhead. We also take the quickly changing topology into consideration. In fact, if a node with different frame length rushes into another network, it can simply free its slot and alter its frame length to the value used by this network, same as a new coming node. So our protocol has the scalability and can adapt to different network.
5. Conclusions and Future Work
In this paper, we propose a TDMA-based channel access mechanism for wireless vehicular network based on IEEE 802.11p. The scheme reduces the rate of transmission collisions and improves the availability of time slots on the control channel by adjusting disjoint sets of time slots to vehicles moving in opposite directions and to the left and right slot frames. Further, the location information of a node is used to allocate the time slot, which efficiently decreases the rate of access collisions. Compared with ADHOC and VeMAC, our scheme decreases the transmit collision and the delay. In the future, we plan to determine how to access the slots on the SCHs in multichannel ad hoc networks.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The work was supported by the National Natural Science Foundation of China (61202099 and U1304606), Science and Technology Development Project of Henan Province (132102210555), Plan for Youth Backbone Teacher of Colleges and Universities in Henan Province (2013GGJS-075), Plan for Scientific Innovation Talent of Henan University of Technology (2012CXRC05), and Plan for Youth Backbone Teacher of Henan University of Technology.