
Abstract
In receiver-initiated medium access control (MAC) protocols for wireless sensor networks, communication is initiated by the receiver node which transmits beacons indicating its availability to receive data. In the case of multiple senders having traffic for a given receiver, such beacons form points where collisions are likely to happen. In this paper, we present altruistic backoff (AB), a novel collision avoidance mechanism that aims to avoid collisions before the transmission of a beacon. As a result of an early backoff, senders spend less time in idle listening waiting for a beacon, thus saving significant amounts of energy. We present an implementation of AB for Texas Instruments' eZ430-rf2500 sensor nodes and we evaluate its performance with simulations and experiments.
1. Introduction
Wireless sensor networks (WSNs) consist of multiple embedded networked wireless devices that are characterized by resource and power constraints. The medium access control (MAC) protocol is responsible for the establishment of a communication link between wireless devices. Its primary role is to coordinate access to and transmission over a medium common to several nodes. Furthermore, it plays a key role in the design of energy-efficient WSNs, as it controls the active and sleeping states of a node, known as duty cycling. The energy consumption of a wireless sensor node is dominated by the power needs of its radio component [1]. As a result, duty cycling the radio plays a fundamental role towards the realization of energy-efficient wireless sensor networks.
For a communication link to be established, both the receiver and the sender need to be simultaneously in an active state. Here, an important distinction needs to be made. In the case of single-hop star topologies and assuming that the receiver has sufficient energy resources to be continuously in active mode, establishing the link does not constitute a particular challenge. A duty-cycling sender will always find the receiver available to receive traffic. Related work, in this scenario, primarily builds upon the IEEE 802.15.4 standard [2], such as DQ-MAC [3].
In multihop topologies, on the other hand, both the sender and the receiver are duty cycling. This poses a particular problem of finding a rendezvous point between a sender and receiver in which both of the nodes are in an active state and a communication link can be established. In the literature there are three fundamental approaches to address this issue. In protocols that follow a synchronous approach, like S-MAC [4], T-MAC [5], and DSMAC [6], to mention only a few, nodes organize the active and sleeping states to overlap with each other. The beacon-enable mode of IEEE 802.15.4 and its extensions (e.g., NCCARQ-WSN [7]) can be also classified as synchronous MAC protocols.
Asynchronous schemes do not require synchronization, as the nodes sleep and wake up independently of the others. This leads to the need of techniques on deciding a rendezvous point for nodes to communicate. There are two fundamental asynchronous techniques, namely, the sender-initiated and the receiver-initiated. The basic technique used in a sender-initiated asynchronous MAC scheme is called preamble sampling, where the sender transmits a preamble to indicate that there is a pending need for communication. The receiver wakes up occasionally into the active state to listen to such a preamble transmission. Once the preamble is detected, the receiver replies with a positive acknowledgment to the sender when the preamble transmission stops. This establishes a communication link between the sender and receiver. Most notable examples of MAC protocols that are based on the sender-initiated paradigm are WiseMAC [8], B-MAC [9], and X-MAC [10]. A thorough survey of sender-initiated schemes can be found in [11].
This paper focuses on the latter asynchronous approach, the receiver-initiated approach. In receiver-initiated asynchronous MAC protocols, the sender listens to the channel waiting for small beacons transmitted by the receiver. The receiver transmits the beacons, which are used by the sender to synchronize with the receiver, in accordance to its duty cycle. The receiver-initiated paradigm was originally introduced by Lin et al. in 2004 (RICER [12]) and became popular with RI-MAC [13] in 2008.
Contribution and Outline of the Paper. The key idea behind the receiver-initiated paradigm is that beacons constitute indirect transmission timeslots. Therefore, when multiple nodes contend for the same beacon, a collision is inevitable. Unless there are specific conditions so that receivers can provide the network with much more beacons than the generated data packets, receiver-initiated protocols are particularly vulnerable to collisions. In this paper, we present altruistic backoff (AB), a novel energy-efficient collision avoidance mechanism for receiver-initiated MAC protocols. AB manages to decrease the energy wasted in idle listening by detecting and resolving inevitable collisions before the beacon transmission. Additionally, we implemented the protocol on Texas Instruments' eZ430-rf2500 sensor nodes [14] and we evaluate its performance by comparing it to random backoff through simulations and experiments.
The remainder of the paper is organized as follows. Section 2 presents the receiver-initiated paradigm of communication along with previous work on collision avoidance. Section 3 summarizes the proposed protocol, AB. Section 4 evaluates the protocol using simulations. Section 5 provides the implementation details and Section 6 presents the experimental results. Lastly, Section 7 concludes the paper.
2. Collision Avoidance in Receiver-Initiated MAC Protocols
In this section, we present the receiver-initiated paradigm of communication between duty-cycling nodes. Furthermore, we briefly survey how existing MAC protocols, that incorporate the receiver-initiated paradigm, address the challenge of collision avoidance. Lastly, we motivate the necessity of our proposed solution by contrasting it with the commonly used approach in terms of energy efficiency.
2.1. The Receiver-Initiated Paradigm
Receiver-initiated MAC protocols use beacons to establish a link between duty-cycling nodes, as sketched in Figure 1. In particular, a node is usually in a sleeping state, in which its radio is turned off. Occasionally, it interrupts its sleep to transmit a small frame, called beacon (B), which indicates its availability to receive data. After the beacon transmission and for a predefined time, the node waits (with the radio tuned on) for a reply. In case of no reply, the node goes back to the sleeping state. A node with data to transmit interrupts its sleep and passively listens to the channel for a beacon that originates from the intended receiver. Upon reception of a beacon, data transmission follows, typically acknowledged by an additional control frame (ACK). The latter concludes the communication cycle and both nodes go to the sleeping state.

Receiver-initiated paradigm of communication. The sender is passively listening to the channel for a beacon (B) that initiates the communication. Idle listening indicates a source of energy consumption where the node is active, receiving, while the other side of the link is in sleeping mode.
Since the publication of RI-MAC [13], several MAC protocols that build on the receiver-initiated paradigm have been proposed. Such protocols mostly focus on optimizing the performance of the network and/or extending some features, such as mitigating the cost of beaconing (e.g., A-MAC [15]), mitigating the time a node awaits for a beacon (e.g., EE-RI-MAC [16] and PW-MAC [17]), dynamically adapting the duty cycles (e.g., ODMAC [18] and CyMAC [19]), adding broadcasting support (ADB [20] and YA-MAC [21]), and adding multichannel support (DCM [22] and EM-MAC [23]). Despite their differences, all these MAC protocols are based on the same receiver-initiated communication paradigm.
A comparison between the receiver-initiated paradigm and other communication paradigms for duty-cycled nodes is out of the scope of paper. For such comparison, we refer the reader to related works [12, 13, 24].
In the literature, there is a line of MAC protocols that extend the paradigm with techniques to predict the wake-up event of the receiver, such as WideMAC [25] and PW-MAC [17]. Moreover, there are several other extensions to the paradigm that are incompatible with such prediction techniques. For instance, in ODMAC [18], the wake-up events are unpredictable as they are scheduled based on the available energy that can be harvested from the environment. The main disadvantages of the wake-up prediction techniques are related to the requirement to deal with clock drifts in the microcontrollers of the sensor nodes and to the fact that they hinder the ability of sensor nodes to autonomously and individually adapt their duty cycles to various environmental parameters. In such dynamic conditions, the wake-up event of the receiver is continuously changing with respect to the available energy or the network conditions. Furthermore, MAC protocols typically follow randomization techniques that aim to avoid unwanted synchronizations (for instance, two nodes continuously transmit their beacon simultaneously) [13]. In this paper, we consider the generic version of the receiver-initiated paradigm, in which the wake-up events of the receiver are unknown to the sender.
2.2. Collision Avoidance
Collision avoidance in wireless networks was introduced because collision detection mechanisms, traditionally used in wired networks, are impossible. Detecting a collision while it is happening is not possible in wireless networks, because the radio is not able to transmit and receive simultaneously. Collided transmissions can only be detected by the receiver after their completion. Therefore, in high throughput wireless networks with large data packets, such as IEEE 802.11 [26], collisions lead to a significant throughput degradation.
The solution to this problem was given by avoiding collisions through Random Backoff (RB). The idea is that the protocol defines a time interval (timeslot) and a contention window (
Receiver-initiated MAC protocols for WSNs inherited the principle of RB from traditional wireless protocols. RI-MAC [13] adopts a variation of BEB. The experiments conducted by the authors of RI-MAC have shown that due to the presence of the capture effect [27] in FM radios, also called cochannel interference tolerance, such a contending scenario does not necessarily lead to collisions. This property shows that the traditional assumption that a packet collision always results in data corruption is false. For this reason, senders in RI-MAC immediately transmit the data upon receiving a base beacon, without any backoff. The receiver listens for a short period of time after transmitting the beacon, known as the dwell time. Dwell time is determined by the current backoff window size. Concurrently, it measures the channel power level and processes the bit pattern received. If a valid data frame header is not detected in time and the measured power level indicates that a transmission is in progress, then this condition is classified as a collision. If a collision occurs, the receiver performs a clear channel assessment (CCA), waiting for the channel to be free. Once a clear channel is determined, the receiver transmits a beacon with a backoff window specified, informing the senders of the failed transmission. The senders that are waiting for an ACK use the backoff window specified in the beacon to perform a random backoff. The senders listen to the channel, while waiting for the random period to expire, before retransmitting the data. If a transmission from another sender is detected, the sender withholds the transmission and waits for an ACK beacon, before resuming with a new random backoff. If a collision happens again, the receiver increments the backoff window using the BEB strategy, until the maximum window size is reached. After that, both senders and receivers accept a failed transmission and go back to sleep, retrying at a later point in time.
In addition to RI-MAC, other receiver-initiated MAC protocols adopt variations of RB, including RICER [12], RC-MAC [28], YA-MAC [21], DCM [22], EM-MAC [23], and IRDT [29]. Intermittent receiver-driven data transmission (IRDT) [29] also incorporates two additional collision avoidance mechanisms. The first is based on the frequency of beacon transmissions. The idea is that by increasing the beacons, the senders are stochastically distributed into more beacons and the collision probability decreases. However, this solution can work only if the receivers are capable of offering their energy resources for forwarding more traffic. The other collision avoidance mechanism is based on data aggregation. By aggregating multiple data packets into larger frames, the total amount of attempted transmissions decreases; thus, the probability of a collision decreases. However, this approach has a negative impact on the delay of each individual data packet. The authors define two methods of collision avoidance with data aggregation: static and dynamic. According to the static method, the protocol uses a constant buffer of n packets. The node keeps collecting packets from other nodes and packets locally generated into the buffer. When the buffer is full, it is transmitted as a single MAC frame. According to the dynamic method, a sender with a single packet to transmit normally waits for a beacon. While waiting, it periodically transmits its own beacons in order to collect packets from neighbors. When the beacon is received, the sender transmits a single frame with as many packets as it managed to collect during that time.
Self-adapting RI-MAC (SARI-MAC) [30] introduces a collision avoidance mechanism through time slot reservation. After the beacon transmission, a contention window period follows during which the nodes pick a uniformly random slot to request for a timeslot reservation. At the end of the contention window, the receiver sends back to all the contending nodes a report with the reservations. Nodes transmit their data in the reserved timeslot, which is long enough for a data packet and the respective acknowledgment. Opportunistic cooperation MAC (OC-MAC) [31] indirectly decreases collisions by allowing senders to opportunistically forward traffic to neighbors that happen to be awake at the same time.
The widely adopted RB has its roots in avoiding long concurrent transmissions that decrease the network throughput. WSN are typically low-traffic networks with small frames that give priority to energy-efficiency rather than throughput. Our motivation for AB lies on our previous work on receiver-initiated MAC protocols, which indicates that during a transmission cycle most of the energy is consumed in idle listening, waiting for a beacon to establish a connection [32]. The cost of the data transmission itself is insignificant compared to idle listening (see Figure 2). RB implies that senders that contend for the same beacon will spend a vast amount of energy waiting for the beacon and the collision will be detected and resolved only after the beacon transmission. On the other hand, AB aims to detect the inevitable collision before the beacon transmission and allow the contending nodes to back off earlier and save energy.
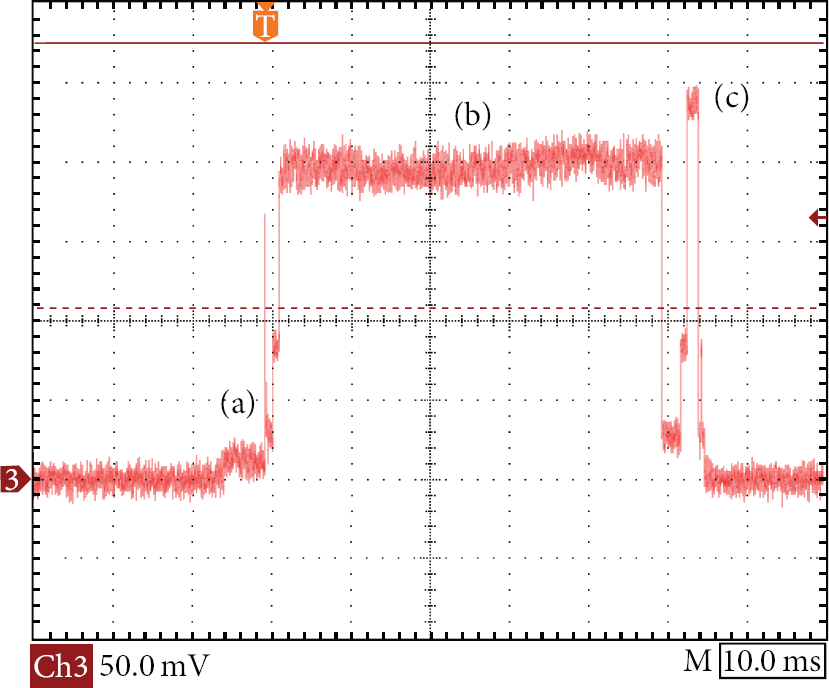
Consumption of a typical cycle based on a study of ODMAC [32]. The current drain is obtained by dividing the shown voltage by the shunt resistor's value (10 Ω). The activity cycle consists of the following actions: (a) sensing and packet generation, (b) waiting for a beacon from the receiver, and (c) transmitting the packet. Power consumption is dominated by the time the radio spends waiting for a beacon, that is, idle listening.
3. Altruistic Backoff (AB)
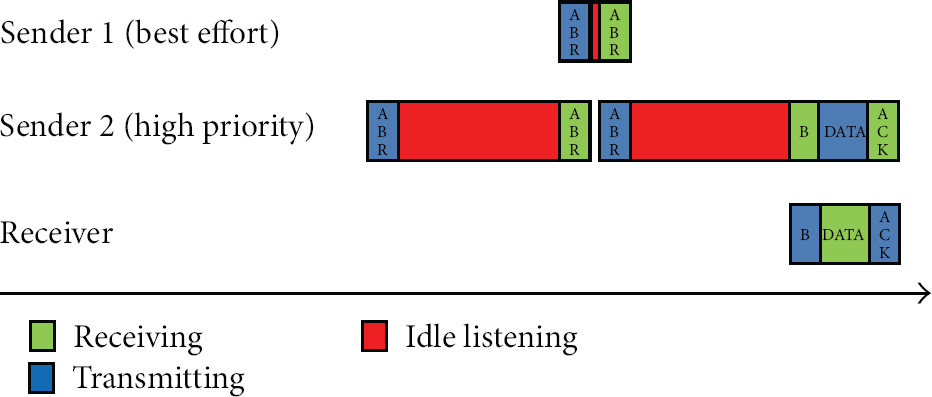
Altruistic backoff is a collision avoidance mechanism that detects potential collisions and avoids them before the actual beacon transmission. Upon a wake-up event, it transmits a control packet, named ABR (altruistic backoff request), that identifies the beacon the node is waiting for. A node that is already waiting for the same beacon and receives this packet, altruistically backs off, offering the beacon to the node that wakes up last. At the low overhead of one extra control packet transmission per data packet transmission, collisions are mitigated and idle listening is significantly reduced. Figure 3 shows an example of AB collision avoidance compared to RB.

Altruistic versus random backoff. In RB the inevitable collision is resolved after the beacon transmission, while both nodes waste energy in idle listening waiting for it. AB uses control packets (ABR) to resolve the inevitable collision before the beacon allowing the nodes to back off earlier and save energy by decreasing the time they spend in idle listening.
The presented backoff scheme does not suffer from fairness issues for two reasons. First, WSNs consist of cooperative nodes that do not have incentives to overutilize the channel. Furthermore, random channel access provides similar probabilities for all nodes to use the beacon. Essentially, the beacon and thus the channel are taken by the sender that wakes up last. Therefore, random channel access guarantees long-term fairness. In other words, as long as different senders have equal opportunities to wake up last, they have equal opportunities to take the beacon. Similarly to RB, long-term fairness can be compromised if nodes do not follow the protocol. In particular, if a sender continuously retransmits an ABR, it will always get the beacon. Generally, we do not consider this a problem, because WSNs are networks of cooperative nodes that do not have incentives to favor their performance against the performance of other nodes. However, this property is a security vulnerability that can lead to denial-of-service (DoS) attacks. Off-the-shelf security protocols, such as the receiver authentication protocol (RAP) [33], can be used to authenticate control packets in an energy-efficient manner and secure the protocol against such attacks.
Beyond being a security vulnerability, this property is used for quality of service (QoS) services through traffic differentiation. Traffic differentiation is valuable in case of applications that generate traffic of different urgency (e.g., alerts versus monitoring traffic). We define two types of data packets that correspond to two traffic classes, the high-priority class and best-effort class. The priority number that defines the priority class is included in the ABR. Upon the reception of an ABR, a node compares the priority number indicated in the ABR to the priority number of the local packet it has to transmit. If and only if the local packet belongs to the high-priority traffic class and the remote packet belongs to the best-effort traffic class, the node immediately transmits a new ABR to retake the beacon, as shown in Figure 4. As a result, the priority number guarantees that ABR retransmissions occur only when a node has a higher priority than the node that currently has the beacon.
Traffic differentiation with AB. Nodes with traffic of high priority, upon being silenced by nodes with lower priority, immediately retransmits an ABR to retake the beacon.
Upon a backoff event, the time of a next transmission attempt can follow different policies with respect to the importance of the data. We can consider two extremes. On one hand, the sender might attempt to transmit immediately, as recommended for traffic of high priority. On the other hand, the sender might choose to buffer the packet and transmit it together with the following packet. We recommend this policy for best-effort traffic, as it is the policy that minimizes the energy consumption. Additionally, the sender might choose a solution between that compromises the advantages and the disadvantages of the two extremes. For the remainder of the paper and unless stated otherwise, we assume the use of the second policy.
AB is also able to support congestion control services with no additional overhead. Such feature has particular interest in adaptive protocols, such as ODMAC [18], that regulate the generated traffic to the energy resources of individual nodes. For example, consider a solar energy harvesting scenario where the receiver is placed in shadow (thus, unable to receive and forward much traffic) and the senders are placed in direct sunlight (thus, able to generate much traffic). In this scenario, the receiver would generate beacons at a low frequency and the senders would exchange many ABR frames, while contending for these few beacons. Senders may interpret frequent ABR frames, as a signal that the channel is congested and reduce the rate they generate data to avoid flooding the receiver.
4. Evaluation of AB through Simulations
In this section, we evaluate the proposed collision avoidance mechanism, AB, by comparing it with RB. The key difference between the two mechanisms lies in the way the collision is avoided. Having energy efficiency as our metric of interest, we focus the comparison on how much time the nodes spend on idle listening. In the case of AB, idle listening is the time a sender waits for a beacon. In the case of RB, idle listening is the time a sender waits for a beacon plus the number of timeslots it waits afterwards. We consider two variations of RB, namely, constant backoff (CB) and binary exponential backoff (BEB). In CB, the
We model and simulate the two methods as follows. We consider one single receiver that transmits beacons at a set frequency and a set of n nodes that are using these beacons to send their data. A round consists of the time between two beacon transmissions. Every round, each node has a probability to generate data that is equal to the ratio of the beaconing period of the receiver over its local sensing period. Nodes with data wake up at a random time during the round. The time from the beginning of a wake-up event until the reception of the following beacon or ABR is considered idle listening. In the case of AB, a collision happens when two nodes transmit the ABR at the same time frame. In the case of RB, a collision happens when two or more senders select the same and lowest random number. We set the duration of the timeslot at 100 μs and the maximum
At the beginning we fix the beaconing period of the receiver (
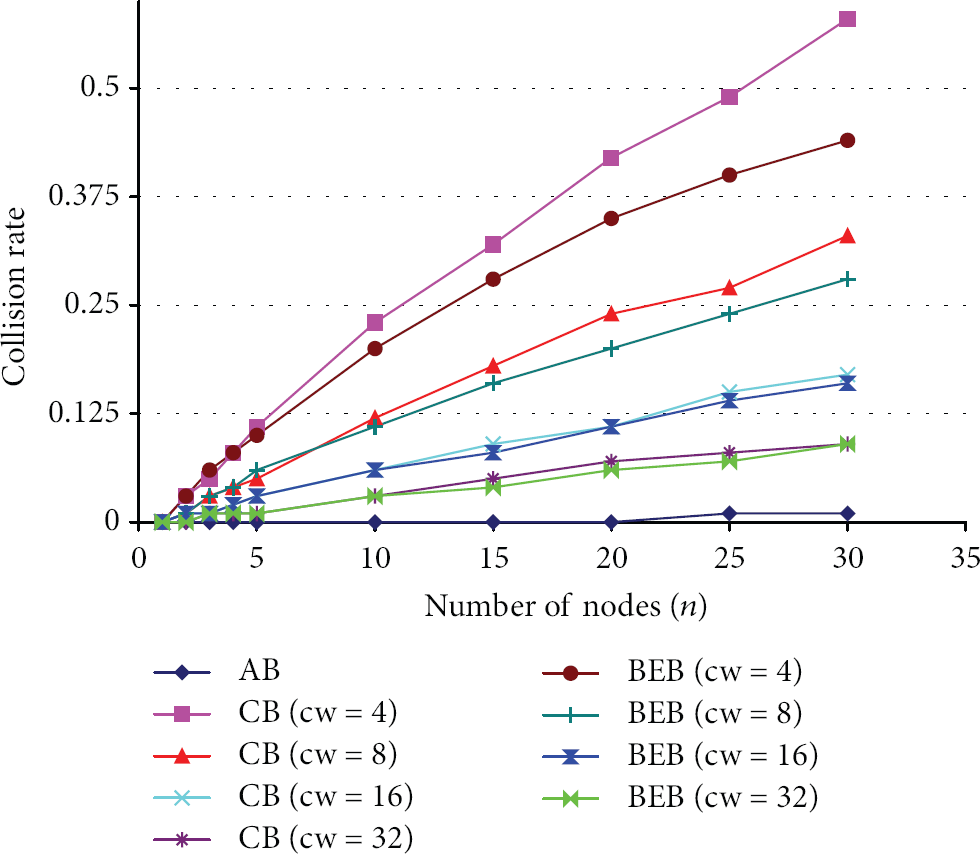
Collision rate for AB and random backoff with constant or binary exponential
Figure 6 shows the average idle listening per transmission attempt on the same simulation. Notice that CB and BEB show a constant behavior that does not increase with neither the number of nodes nor with the contention window. The average idle listening is equal to half the period of beaconing (

Average Idle listening per transmission attempt for AB and random backoff with constant or binary exponential
The above results indicate that to study idle listening is sufficient to consider only one version random backoff. In Figure 7, we consider 5 contending senders and CB with fixed contention window (

Average Idle listening per transmission attempt for AB and random backoff with constant
Figure 8 shows the distribution of successful transmissions over all the contending nodes, considering
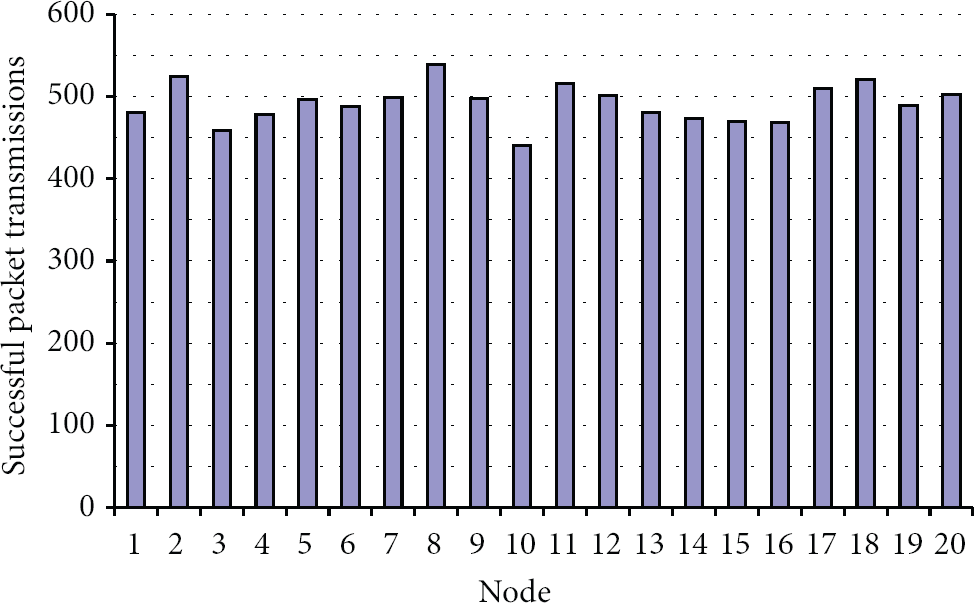
The distribution of successful transmissions indicates that AB provides long-term fairness, as contending nodes have equal probabilities to use the channel.
Next, we demonstrate the ability of AB to differentiate traffic to provide QoS. We consider two classes of traffic, namely, high priority and best effort. Sensor nodes mark the data that they generate as high priority with a probability P. According to the protocol specification, the sensor node that wakes up last and has a data packet marked as high priority takes the beacon. If there is no sensor node with high priority data packets contending for the medium, the sensor node that wakes up last and has a data packet marked as best effort takes the beacon. For the following simulation, we consider

The average ratio of the amount of data packets that take a beacon over the total amount of generated packets for each priority class. As the contention increases, the protocol sacrifices best effort traffic for high priority traffic.
The results indicate that AB is long-term fair and scales well with high contention, as the ABR frames efficiently put the contending nodes to sleep early and less energy is wasted in idle listening. Furthermore, AB is able to differentiate traffic to provide QoS.
5. Implementation of AB
We implemented AB as an extension to the implementation of on demand MAC (ODMAC) [32] for Texas Instruments' eZ430-rf2500 nodes [14]. The nodes consist of an MSP430 microcontroller (MCU) and a CC2500 radio, operating in the 2.4 GHz band. ODMAC is a receiver-initiated MAC protocol for energy harvesting-wireless sensor networks (EH-WSNs) that has been developed upon the principle of dynamically adapting the duty cycles to the amount of harvested energy. Nevertheless, the basic communication scheme of ODMAC follows the receiver-initiated paradigm of communication, as described in Section 2. We refer the reader to [32] for the details of implementation of the protocol. ODMAC is implemented as a finite state machine (FSM). Its functionality is mainly based upon two routines, namely, send and receive. Unless one of these two handlers is invoked, ODMAC is in sleeping state and the radio is off. The send routine generates and formats a packet around the payload (i.e., the result of a sensing operation). When the packet is ready, the radio is switched on into listening mode and the state machine awaits for an interrupt signaling the reception of an appropriate beacon. Should this happen, ODMAC continues its execution and the data packet is transmitted. At the end of a packet transmission, the radio is switched off.
AB extends the ODMAC send routine as follows. After the packet generation, an ABR frame that includes information about the intended receiver is generated. After a successful CCA the transmission of ABR follows. Then, the radio is switched to listening mode and the sender begins to listen for a beacon. Listening is interrupted either by the reception of the expected beacon or by the reception of an ABR that indicates interest for the same beacon. In the former case, data transmission follows normally. In the latter case, the routine returns and indicates a backoff. It should be noted that the send routine performs one attempt to transmit the packet. In case of backoff, the higher layer is free to decide at which point in the future will attempt again to transmit the same packet. The state machine in Figure 10 summarizes the operation of AB as part of the ODMAC protocol.

The finite state machine that specifies the operation of AB as part of the ODMAC protocol.
For the traffic differentiation services of AB, we extend the implementation by adding a priority bit in the header of ABR control packets. The priority bit indicates if the data packet is classified as high priority or best effort. When a sender that waits for a beacon receives another ABR packet, it compares its local priority bit with the received priority bit. If and only if the local data packet is classified as high priority and the received ABR indicates a best effort data packet, the sender retakes the channel by invoking the send routine again.
6. Experimental Results
In this section, we experimentally evaluate AB. For the purposes of a comparison with RB, we also implemented a simple variation of the protocol with constant contention window, CB, in the ODMAC protocol. We chose to implement the CB variation because our simulations (see Section 4) indicate that the variation of the protocol and the length of the contention window do not affect the idle listening overhead significantly. CB is implemented by adding a random delay between the reception of a beacon and the transmission of the data. In particular, we use a constant contention window (
To measure the idle listening time interval, we use the internal timer unit, which is set to use the low frequency oscillator (12 KHz) that remains active when the MCU goes into low power (i.e., sleeping) modes. Because of the size of its counter register (16 bits), the timer is able to measure time intervals up to approximately 5.5 seconds. Each node is set to keep the sum of all the time it spent in idle listening since reset and reports the value in every data packet. In addition to that, a sequence number of all the data transmission attempts are also reported. Using the two aforementioned values, we can estimate the average time a node spent in idle listening per data transmission attempt.
For the experiments presented in this section, we use the following test bed. We use a single-hop star topology with a set of senders contending to transmit to a single receiver. The contending senders are placed physically close to each other and to the receiver, in order to mitigate any packet losses due to channel errors. The receiver is connected to a laptop, through which we collect all the received packets. The receiver node is set to transmit beacons but never generate data of its own. A set of sender nodes are configured to periodically transmit data to the receiver. We use ODMAC's randomization feature [32] to randomize the period of data transmission attempts and enforce random channel access. In particular, after each data transmission, the wake-up interrupts are randomized over the whole space of the register. The node then calls the send routine once every
In the experiment shown in Figure 11, we set the beaconing period of the receiver to 4 seconds and we used 3 contending senders. In the x-axis we variate the period of a transmission attempt for all the senders in wake-up interrupts, that is, the

Average idle listening per transmission attempt for ab and random backoff with constant

The ratio of successful transmissions over the total number of transmission attempts indicates that AB is long-term fair.
In the next experiment, we fix the period of transmission attempts to 2 wake-up cycles and we variate the number of contending nodes from 1, that is, no contention, to 4. Figure 13 shows the average time each node spends on idle listening per transmission attempt for the two protocols. The duration of each experiment was 1 hour. The results follow a similar trend to the respective simulation experiment, shown in Figure 6. In particular, when there is no contention, the two protocols have similar performance. For the case of CB, the average time spent in idle listening remains constant, being dominated by the time the node waits for a beacon. In the case of AB, on the other hand, idle decreases as the contention increases.

Average idle listening per transmission attempt for ab and random backoff with constant
Next, we evaluate the long-term fairness of AB in the scenario of contending senders with different traffic generation frequencies. Such scenario has interest in cases of nodes with different forwarding duties or different power resources (e.g., energy harvesting sensor nodes have access to different levels of ambient energy). The experiment is designed as follows. We use 2 nodes and fix the period of transmission attempts of the first node to 4 wake-up interrupts, while varying the period of the second node from 2 to 4. The duration of each experiment is 2 hours. Figure 14 shows the results of the experiment. The triangle-line shows the ratio of the packets generated by node 1 over node 2, which increases as the period of transmission attempt of node 2 increases. Note that, when the nodes have equal periods, the ratio is close to 1. We observe that, despite the fact that the two nodes attempt to use the channel at different frequencies, they maintain equal opportunities to obtain the beacon. The ratio of success full packet transmissions over the total amount of transmission attempts shows a constant behavior.

The ratio of successful transmissions over the total number of transmission attempts for node 1 and node 2. The period of transmission attempts for node 1 is fixed to 4 wake-up cycles. The triangle-line shows the ratio of the packets generated by node 1 over node 2.
In the next experiment, we experimentally evaluate traffic differentiation by replicating the simulation shown in Figure 9. The beaconing period of the receiver is set to 1 second and the period of transmission attempts of the senders is randomized with an average of approximately 3 seconds. Moreover, nodes generate high priority data packets with a probability of

The average ratio of the amount of data packets that take a beacon over the total amount of generated packets for each priority class. As the contention increases, the protocol sacrifices best effort traffic for high priority traffic.
In the last figure, we validate the simulations by comparing their estimations to the results obtained through the experimental evaluation. In particular, we configure the simulator to the exact same configuration that is used in the test-bed experiment presented in Figure 13. In the experiment the period of transmission attempts of the senders is set to 2 wake-up cycles that are uniformly randomized over the whole space of the register, leading to an average period of approximately 5.5 seconds. Thus, in the simulator we set period of transmission attempts to 5.5 seconds. The beaconing period of the receiver is set to 3 seconds. Figure 16 plots the ratio of the average idle listening per transmission attempt of AB over CB as obtained from the simulation and the test-bed experiment. Observe that both simulations and test-bed experiments give close results, while the behavior of the protocol follows the same trend. The difference indicates that, in the experiments, random access is not as uniformly distributed throughout the interval between two beacons, as assumed in the simulations.

The ratio of the average idle listening per transmission attempt of AB over CB as obtained from the simulations and the test-bed experiments.
The results of the experiments verify the trends that are suggested by the simulations, presented in Section 4. AB scales well with both high contention and high traffic and provides equal opportunities for the contending nodes to access the channel. Detecting the inevitable collisions before the beacon transmission allows the nodes to resolve the collision before significant amount of energy is wasted in idle listening while waiting for the beacon.
7. Conclusion
In this paper, we have focused on receiver-initiated MAC protocols in wireless sensor networks. Such protocols initiate the data exchange with a beacon that is transmitted by the receiver and states its availability to receive traffic. Beacons nullify the benefits of random channel access, as they constitute points of potential collisions even in situations of sparse traffic. We have proposed AB, a collision avoidance mechanism that exploits random channel access to avoid collisions while decreasing the time nodes waste energy in idle listening. Simulations and experiments indicate that AB is long-term fair and scales well with increasing levels of contention. Furthermore, AB provides QoS by prioritizing traffic of different urgencies. AB is compared to the commonly used collision avoidance mechanism, namely, random backoff, and the results demonstrate the energy savings that can be achieved with AB. Finally, we have discussed an implementation of the proposed collision avoidance mechanism for Texas Instruments' eZ430-rf2500 sensor nodes [14], incorporated in the ODMAC protocol [32].
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.