
Abstract
When the right-turn vehicles share the same phase with pedestrians on divided lanes at intersection, the stopped buses or medium-size vehicles that closed to the right-turn vehicles would block the view of drivers and pedestrians from the far-side of crosswalk. This paper aims at analyzing the changes of lag/gap acceptance behavior with/without considering sight obstruction and the headway of following right-turn vehicles by video observation. Cumulative Weibull distribution function was used to estimate parameters of lag/gap acceptance probabilities. The result showed that right-turn drivers tend to accept a smaller lag/gap with restricted sight, and it would lead to more potential conflicts between right-turn vehicles and pedestrians. However, larger headway of following right-turn vehicles with sight obstruction may result in delay and reduced capacity in right-turn lanes. This study will hopefully improve the understanding of the relationship between visibility and pedestrian-vehicle conflicts.
1. Introduction
Critical situations such as vehicle-pedestrian conflicts at signalized intersection are complex and serious, especially when pedestrians share the same phase with right-turning vehicles. And it draws significant attention by many scholars.
At a signalized intersection without protected right-turn phase, right-turning vehicles and pedestrians have to share the same phase. In general, vehicles should yield to pedestrians in such cases, but in reality, drivers prefer smaller gaps and will not yield to pedestrians because of some situational factors like speed of vehicles/pedestrians, the volume of vehicles and pedestrians, the behavior of right-turning vehicles and crossing pedestrians, and geometric of the intersection and the delay of pedestrians.
Driver and pedestrian behavior have already been investigated by introduction of some pedestrian traffic facilities [1] and some models which can describe certain behavioral tasks [2–4]. To an identified behavior, lags/gaps acceptance behavior, various functions were used to estimate in different conditions in previous literatures. Siegloch developed the linear regression model and defined the parameters in this model to analyze gap acceptance [5]. The method is straightforward for gap acceptance, but the probability distribution of gap acceptance was ignored. Then, the logistic regression model was proposed. Cooper and Zheng used logistic regression method to analyze “sequence” gap acceptance between distracted and not distracted [6]. A Bayesian and Bootstrap approaches were used to propose a gap acceptance model in left-turn maneuver (Rakha et al., 2011) [7]. Neurofuzzy approach was used to develop gap acceptance model for two-wheelers at uncontrolled intersection (Sangole et al., 2011) [8]. Alhajyaseen et al. [9] proposed Cumulative Weibull distribution to analyze the lag/gap acceptance between left-turn vehicles and pedestrians. It was found that the Cumulative Weibull distribution would overcome the mathematical problems brought by the aforesaid models.
Considering the sight problem on driver and pedestrian behavior at signalized intersection, only a few researches have fully investigated its influence. Yan and Radwan identified the changes of driver behaviors associated with the fact that drivers’ restricted sight distances may lead to an extra traffic delay and a capacity reduction [10]; Hassan and Massof presented a newly developed model to quantify street-crossing decision-making performance in pedestrians at low vision and found that the subjects with visual impaired were able to make street-crossing judgments independently compared to those of normally sighted subjects [11]; Ibrahim et al. applied a reliability analysis for optimizing the safety of highway cross-section with restricted sight distance [12]. But there are no relevant studies that referred to the safety problems of vehicles and pedestrians with restricted sight [13–15].
The sight problem in this paper means the stopped buses or medium-size vehicles which close to the right-turn vehicles blocked the view of right-turn vehicles and crossing pedestrians from far-side of crosswalk. In such situation, right-turning vehicles will accept smaller lags/gaps, which might lead to a serious conflict between vehicles and pedestrians, and it will cause traffic delays as well as the reduction of traffic capacity in the right-turn lane.
Field data collection at a signalized intersection with the potential sight problem between right-turning vehicles and crossing pedestrians is conducted. Then, based on the observation data, the right-turn gap acceptance parameters of Weibull distribution models are estimated. Moreover, the variation of the lag/gap acceptance and the right-turn vehicles’ headway between with and without sight problem were calculated and analyzed. This study aims to identify the different behaviors between with and without restricted sight. Finally, conclusions and future works are discussed.
2. Data Collection
The survey was based on pedestrians and right-turn vehicles that shared the same phase in real traffic conditions, and video recording is applied to observe traffic behavior. The main following factors should be considered in choosing the observation sites
pedestrians share the same signal phase with the right-turn vehicles when pedestrians were allowed to cross the crosswalk (pedestrian green time?);
appropriate volumes of large or medium-size straight-going vehicles;
the straight-going and right-turn vehicles use the different lanes;
proper volumes of right-turning vehicles and crossing pedestrians from the far-side of the crosswalk so as to collect gap acceptance behaviors with and without sight problem efficiently.
Figure 1 shows that the right-turning vehicles share the same phase with the pedestrians from the far-side crosswalk.

Right-turning vehicles share the same phase with the pedestrians from the far-side crosswalk.
Zhongguancun South Street, Xueyuan South Road, was selected as the field study site with twelve lanes on major road, six lanes on minor road, and one right-turn lane at each entrance (see Figure 1.). The observed data was collected on minor road. The pedestrian and vehicle traffic volume is large because of one campus, one subway station, and two bus stations around. Therefore, the number of data collection is moderate (data sample? observation time? or ? It's a little difficult to understand this sentence.). This study was carried out on three separate weekdays: during daytime from 9:00 am to 4:00 pm in good weather conditions. The volumes of right-turning vehicles with/without obstruction during the observation periods are showed in Table 1.
The volumes of right-turning vehicles.

3. Methodology
In order to identify the changes of driving behavior with and without restricted sight, this study is framed by the following assumptions.
Each driver has his/her own free-flow speed before crossing the intersection. When a driver does not encounter other road users, the speed of the vehicle is defined as the free-flow speed.
Right-turning drivers make their own yielding decision to the pedestrians on the crosswalk. Generally, a vehicle should yield to a pedestrian when they share the same phase, but still some aggressive drivers do not give precedence to the crossing pedestrians. Moreover, with the restricted sight condition, drivers may force through the crosswalk with a risk decision.
Pedestrian behavior is independent. A pedestrian reacts to other pedestrians or vehicles are common in real traffic situation and it is highly complex. And any change of pedestrian behavior would affect driver behavior. (Do the first three sentences have some problems in logic?) The pedestrians are considered to be with compliance. Based on the video recordings, pedestrians without sight obstruction barely changed their speed, while pedestrians with sight obstruction would slow down when approaching the conflict area. But both pedestrian reactions to vehicles were not significant issues and were not considered in this paper.
The conflict area in this paper equals the area of a vehicle body on crosswalk (see Figure 2). All observed conflicts occurred in the conflict area. When pedestrians share the same phase with right-turning vehicles, lags/gaps referred to the crossing of right-turn vehicles. Lag is the time that a pedestrian needs to reach the conflict area while gap is the time difference between two pedestrians that the first pedestrian successfully cleared the conflict area and the second pedestrian reaches the conflict area (Alhajyaseen et al., 2011) [9]. Both lags and gaps are used to estimate the effect of restricted sight on the behavior of right-turn vehicles and pedestrians from the far-side of the crosswalk, as shown in Figure 3.

Conflict area of right-turning vehicles and crossing pedestrians.

Lags and Gaps between right-turn vehicles and pedestrians from the far-side of the crosswalk.
Weibull distribution with two parameters was used in this study to analyze the difference lag/gap acceptance between with and without the sight problem on right-turn vehicle behavior. Weibull distribution was widely used in lifetime distribution of reliability engineering in previous studies. Furthermore, Weibull distribution is also available for the breakdown probability in traffic field. The function of Cumulative Weibull distribution with two parameters is [13]

where P(x) is the acceptance probability of lag/gap x and η and m are the parameters of Weibull distribution.
4. Results
4.1. Lag/Gap Acceptance Behavior
Due to the limitation of observation samples, observed lags/gaps were divided into 1.0 second size. Based on the video-recording analysis, 449 accepted lags/gaps were observed without sight obstruction and 115 accepted lags/gaps were observed with sight obstruction. Table 2 shows the number of lags/gaps of observed samples. The minimum square method was used to calculate the two parameters of Weibull distribution. And the estimated parameters of Weibull distribution are listed in Table 3.
Lags/gaps of observed samples.

Lag/gap acceptance parameters of Weibull distribution.
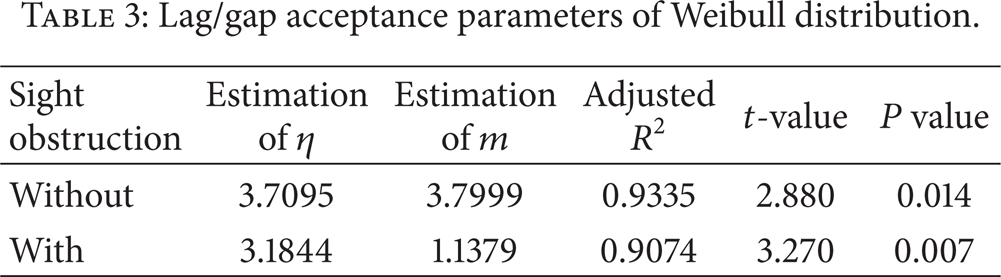
Based on these observed accepted and rejected lags/gaps, Figure 3 shows the acceptance probabilities in every second. As shown in Figure 4, lags/gaps between right-turning vehicles and pedestrians far from the right-turning vehicle without sight problems have significantly higher acceptance probability than those with sight problems. Because of the sight obstruction, right-turners might notice the approaching pedestrians later and they were more likely to cross the conflict area in a normal speed or a higher speed rather than decelerate or stopped to yield pedestrians. Moreover, when drivers estimate the lags/gaps of pedestrians, they would have an error in decision making.

The probability of acceptance lags/gaps between with and without sight obstruction.
Furthermore, when the available lags/gaps are smaller than 3.9's, the right-turning drivers with sight problems are preferred to accept a smaller lag/gap. However, when the available lags/gaps are larger than 3.9's, the right turners with sight obstruction are more likely to reject the relatively lager lags/gaps than those without sight obstruction. In general, when right-turning drivers could not see the pedestrians due to the blocking sight, a large lag/gap might be considered and the driver would accept a small lag/gap in reality. On the contrary, these rejected lager gaps/lags may be a smaller lag/gap and the driver rejected a large lag/gap in reality at the obstructed sight intersection. In addition, aggressive drivers were more willing to accept smaller lags/gaps while larger lags/gaps could be accepted by conservative drivers. However, a conflict or even a collision may occur when accepting very a small lag/gap.
4.2. Headway of Following Right-Turn Vehicles
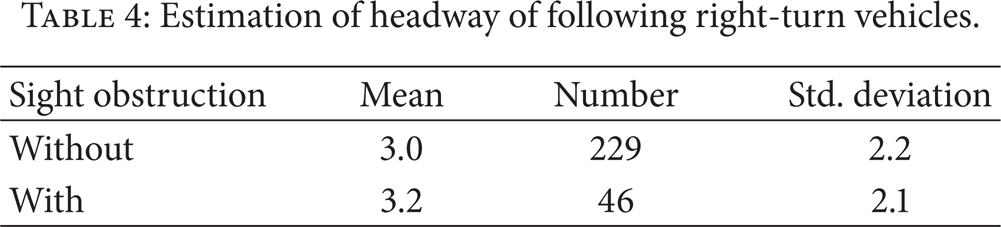
Although right-turning vehicles are always available at the intersection, there are also some following vehicles turn right when they share the same phase with pedestrians. Using mean headway to describe the behavior of following right-turn vehicles, the estimation results of headway of following right-turn vehicles are shown in Table 4. The 275 samples of the following right-turn vehicles are collected, including 229 samples without sight problems and 46 with sight problems. The mean headway of following right-turn vehicles with obstruction is 3.2's and it is 0.2's longer than the one without obstruction. The result indicated that with the sight problem, the headway of following right-turn vehicles is increased compared to those without sight obstruction. The following driver takes much more time to deal with the sight problems caused by the obstruction. Moreover, Figure 5 shows the different headway of the following right-turn vehicles. The headway in this study is identified as the average headway during the continuous followed vehicles.
Estimation of headway of following right-turn vehicles.

The difference between with and without sight obstruction in headway of the following right-turn vehicles.
As shown in Figure 5, the mean headway of 47.6% following right-turn vehicles without sight problems is 3.0 seconds. The mean headway of those vehicles with sight problems is a cumulative distribution, within which over 25% following right-turn vehicles is 4.0 seconds. In addition, the mean headway is 3.0's for the vehicles without sight problems while 3.20's for those with sight problems. The larger headway would lead to the lower traffic capacity of turn-right lane. However, this trend is not statistically confirmed because of the limited samples. Only 46 following vehicles are with restricted sight. So it may not support a statistical conclusion. In general, if the sight of drivers is limited, they may follow the lead car further to have more time to make decision and maneuver in emergency.
5. Conclusion
This study aimed to analyze the effect of the restricted sight on traffic safety between vehicles and pedestrians. The acceptance of lags/gaps was analyzed between right-turn vehicles and pedestrians from far-side crosswalk considered the sight obstruction. Empirical statistics analysis was used to achieve the acceptance probability of pedestrian lags/gaps. Then Cumulative Weibull distribution was proposed for the probability distribution of lag/gap acceptance. The result showed that sight problem caused by the stopped bus or medium-size vehicle may contribute to the decreasing of accepted lags/gaps for the right-turning vehicles, and it may lead to serious conflict or even accidents between vehicles and pedestrians. Moreover, the video analysis showed that the sight problem may lead to incorrect behaviors of right-turner. Drivers tend to accept smaller lags/gaps and reject larger lags/gaps. Therefore, more potential conflicts would happen at the intersection because of sight problem between right-turn vehicles and pedestrians from far-side of the crosswalk. Furthermore, it was found that when driver's view was blocked, the average headway of following right-turn vehicles was also increased compared to those without sight problem. However, the lager acceptance lag/gap and headway could result in extra increments of traffic delay and the reduction of traffic capacity. The results will hopefully improve the understanding of the relationship between visibility and Pedestrian-vehicle conflicts; furthermore, they provide field data for some solutions of intersection safety.
However, because of the limited experiment conditions of this study, the analysis only focused on the pedestrians from the far-side of the crosswalk without considering other factors potentially associated with right-turn drivers’ lag/gap acceptant behavior. There are numerous factors which affect lag/gap acceptance, such as driver age and gender, the free speed of right-turn vehicles, driver's distraction level, and the changes of pedestrians’ behavior and so on. Furthermore, in-car video equipment or driving simulation will be used to get more detailed information on driver behavior.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This research was supported in part by the National Nature Science Foundation of China under Grant 51378062, 71301010.