
Abstract
In wireless sensor networks (WSNs), aggregator nodes perform the data aggregation process. Thus, careful selection of the aggregator nodes is needed to reduce network traffic in data aggregation process and prolong overall lifetime of the network. In this paper, we formulate selection process of the aggregator nodes as a top-k query problem. To answer the top-k queries efficiently in the large-scale WSNs, building and using the indexes are important. Thus, we propose an efficient index building algorithm for selection of aggregator nodes, called the Approximate Convex Hull Index (simply, aCH-Index). The main idea of our approach is to construct a convex hull over the sensor nodes in the WSNs, which enables speeding up the extraction of a set of sensor nodes that are potential candidates to become an aggregator node. In order to do so, the aCH-Index computes the skyline over the entire set of the sensor nodes, partitions the region into multiple subregions to reduce the computing time of convex hull in all origins, and then computes the convex hull in each subregion. Through the experiments with synthetic data, we show that aCH-Index outperforms the existing methods.
1. Introduction
A wireless sensor network (WSN) is a self-organized network composed of a large number of sensor nodes that interact with physical world [1, 2]. In a typical WSN, the sensor nodes have limited resources such as battery power, computing capability, and memory [3]. The data aggregation is the mechanisms to effectively use the limited resources in WSNs. In WSNs, the aggregator nodes perform the data aggregation process. Thus, careful selection of aggregator nodes is needed to reduce the network traffic in data aggregation process and prolong overall lifetime of the network [4]. However, network conditions change often because of resources sharing, computation load, and congestion on network nodes and links. These circumstances make the selection of the aggregator nodes difficult [5, 6].
In this paper, we formulate the selection process of aggregator nodes as a top-k query problem. There has been continuous interest in top-k query processing in database field. To answer the top-k queries efficiently in large databases, building and using the indexes are important. The layer-based methods are well-known techniques to answer top-k queries efficiently that use convex hull or skyline [7] to construct an index. A convex hull is the boundary of the smallest convex region of a set of points in space and the vertices are the subset of points on the boundary [8]. Intuitively, the convex hull is obtained by covering the point set. The convex hull can be expressed based on all attributes in the databases. It constructs the database as a layer list, where the ith layer includes the potential objects that can be the top-i answer. In other words, convex hull answers top-k queries by reading at most k layers from the layer list. However, the convex hull has problems of high time complexity and large memory usage, because it should maintain the information of all facets and calculate whether or not an object is inside of the particular facet [9]. On the other hand, the skyline can find the skyline points quickly, but its layer size can be large in high-dimensional databases [10].
In this paper, we propose an efficient index building algorithm for selection of aggregator nodes. Specifically, we propose a new convex hull method, called the Approximate Convex Hull Index (simply, aCH-Index), that can reduce the network traffic in selection of aggregator nodes in WSNs. The main idea of our approach is to construct a convex hull over the sensor nodes in the WSNs, which enables speeding up the extraction of a set of sensor nodes that are potential candidates to become an aggregator node. To do so, the aCH-Index computes the skyline over the entire set of the sensor nodes and partitions the region into multiple subregions to reduce the computing time of convex hull in all origins, and then computes the convex hull in each subregion.
More precisely, the contributions we make in this paper are as follows.
We propose the aCH-Index that can reduce the number of candidate sensor nodes without false dismissal. The aCH-Index essentially combines aspects of a number of the established algorithms and reduces the computing time. Through the experiments with synthetic data, we show that the aCH-Index outperforms the existing methods.
The rest of this paper is organized as follows. Section 2 describes existing research related to this paper. Section 3 formally defines the problem. Section 4 introduces the proposed method. Section 5 presents the results of performance evaluation. Section 6 summarizes and concludes the paper.
2. Related Work
In this section, we discuss the existing work for answering top-k queries efficiently and top-k query processing in WSNs.
2.1. Indexing Algorithms for Top-k Query
In this section, we present the existing indexing algorithms for answering top-k query. There have been a number of index building methods proposed to answer top-k queries by accessing only a subset of the databases. The methods to construct an index using the convex hull or skyline are well known. We discuss the convex hull algorithms in Section 2.1.1 and skyline algorithms in Section 2.1.2.
2.1.1. Convex Hull Algorithms
The representative methods that use the convex hull are Onion [8] and HL-index (Hybrid-Layer Index) [11]. Onion constructs an index by making layers with the vertices of the convex hull over the objects in the multidimensional space. That is, it creates the first layer with the convex hull vertices over the all objects and then creates the second layer with the convex hull vertices over the remaining objects, and so on. Finally, the set of layers becomes the layer list. It is shown that Onion answers top-k queries by reading at most k layers starting from the outmost layer.
Onion is capable of answering a query with an arbitrary (monotone or nonmonotone) linear function because of the geometrical properties of the convex hull [12]. On the other hand, it takes a long time for Onion to compute convex hull. Because when new object is added, Onion should calculate whether new object is included in the convex hull or not. And it uses much memory to maintain the information needed in computing process [13].
HL-index constructs a layer list with the convex hull as Onion does and then constructs sorted lists in the ascending or descending order based on each attribute value of the objects in each layer. However, since HL-index constructs a layer lists as Onion does, the problems of high computing time and large memory usage still exist.
2.1.2. Skyline Algorithms
The representative methods that use skyline are BNL (Block Nested Loops) [7], SFS (Soft Filter Skyline) [14], and LESS (Linear Elimination Sort for Skyline) [15]. BNL sequentially reads the input relation and saves in a window w. When an object o is read, it is compared to objects in w. If an object in w dominates o, BNL eliminates o. Otherwise, if o dominates some objects in w, these are deleted from w and o is added to w [7]. The SFS algorithm [14] improves over BNL by presorting the input relation according to the entropy value of object. LESS is an improvement of SFS that essentially combines aspects of a number of the established algorithms [15]. LESS discards some dominated objects earlier; thus this has the advantage of reducing the number of pairwise comparisons between the objects more than that SFS has. However, the number of comparisons is still large.
The partitioning technique is also used in skyline algorithms. Vlachou et al. [16] proposed the angle-based partitioning technique for constructing skyline. PPPS (Plane-Project-Parallel Skyline) is proposed in [17], which makes a hyperplane by projecting the data objects first and then constructs skyline by partitioning the hyperplane.
2.2. Top-k Query Processing in WSN
In this section, we introduce top-k query processing methods in WSN.
The representative method for data aggregation in WSN is TAG (Tiny Aggregation Service) [8] and PANEL (Position-based Aggregator Node Election). TAG is a tree-based data aggregation protocol that builds a routing tree in top-down manner for sending data to the top sensor nodes. PANEL is a cluster-based data aggregation protocol that uses the geographical position information of the sensor nodes in order to select an aggregator node.
Nasridinov et al. [4, 18] proposed an efficient aggregator node selection method. Similar to our method, the authors formulate the selection process of aggregator node as a top-k query problem and solve it by using a modified Sort-Filter-Skyline (SFS) algorithm. The main idea of the proposed method is to immediately perform a skyline query on the sensor nodes in the WSN, which enables extracting a set of sensor nodes that are potential candidates to become an aggregator node.
3. Problem Definition
In this section, we formally define top-k queries focused in this paper, and the properties that our layering method should have. A target relation R has d attributes,
A top-k query Q is defined as a pair
For processing these top-k queries, layer lists should satisfy optimally linearly ordered set property [8] in Definition 1 below. In other words, in the ith layer, there is at least one object, whose score for any weight
Definition 1 (optimally linearly ordered sets [8]).
A collection of sets

At “The Notations” section in the end of paper, we summarized notations that we use throughout this paper. The symbols that have not been introduced yet will be explained in Section 4.
4. The Approximate Convex Hull Index (aCH-Index)
In this section, we explain the proposed method, the Approximate Convex Hull Index (aCH-Index). The computing time of convex hull method becomes slow and memory usage becomes large as the dimension increases. The aCH-Index reduces the computing time and memory usage of convex hull by constructing skyline layer and partitioning the region. In Section 4.1, we give the overview of the aCH-Index. We explain each step of the aCH-Index in detail in Sections 4.2, 4.3, and 4.4. In Section 4.5, we explain an example of constructing the convex hull in WSNs.
4.1. Overview
The aCH-Index is constructed by three steps as shown in Figure 1: (a) skyline layering step, (b) partitioning step, and (c) computing step. For the convenience of the explanation, Figure 1 shows the process of constructing the first layer in two-dimensional region.

Overall process of constructing the aCH-Index in the two-dimensional region.
More precisely, in the skyline layering step, we compute the skyline over the entire set of the objects. By building the skyline layer in the first step, the aCH-Index will be able to get the result set without false dismissal. In Figure 1(a), the line composed of black points represents the skyline and the dotted line represents the skyline layer.
In the partitioning step, we can reduce the size of candidate objects once again by partitioning the skyline layer, obtained in the skyline layering step, into m subregions. We can get
In the computing step, we compute the convex hull over the skyline layer in each subregion m times. In Figure 1(c), the dotted line represents the first layer of the aCH-Index.
Algorithm 1 shows the Approximate Convex Hull Algorithm. The input to the Approximate Convex Hull Algorithm is the data objects in database (i.e., sensor nodes in WSNs), and the output is Approximate Convex Hull Index. In lines 1 to 3, we initialize an index and set the number of subregions and a virtual object. We first compute Skyline Layering Algorithm, which will be introduced in Section 4.2, in line 4. Next, in the second step, we partition skyline
(1) Initialize a Approximate Convex Hull Index aCH-Index. (2) Set (3) Set (4) Compute Skyline Layering Algorithm. //Algorithm 2 (5) Partitions SL into m subregions using (6) for (7) (8) Convert (9) (10) (11) (12) Insert (13) (14) (15) (16) Compute convex hull method (17) (18) Set candidate = true. (19) (20) Set candidate = false. (21)
4.2. Skyline Layering Step
The objects in the skyline layer are subsets of the convex hull objects. In this paper, we adopt the SFS algorithm [14] as a method of constructing the skyline, which presorts the input objects according to the entropy value of object. Equation (2) represents the entropy value of an object o on the region:

Here,
Figure 2 shows the process of skyline layering step in the two-dimensional region. In Figure 2(a), the objects are presented in the two-dimensional region. In Figures 2(b) and 2(c), the line composed of black points represents the skyline in origins

The process of skyline layering in the two-dimensional region.
Algorithm 2 shows the Skyline Layering Algorithm. The input to the Skyline Layering Algorithm is data objects in database (i.e., sensor nodes in WSNs), and the output is a skyline layer. In lines 1 to 4, we initialize a skyline layer and set a number of origins and number of skyline. In lines 5 to 14, we construct skyline layer. First, we sort the data objects using entropy value in line 6. Lines 16 to 20 describe Sort function. In lines 7 to 13, we compute skyline in each origin. We compute the IsSkyline function in line 7. In lines 24 to 30, the IsSkyline function compares data object and skyline layer to figure out the dominating relationship between them. If data object dominates the skyline object, then we remove skyline object from
(1) Initialize a Skyline Layer SL. (2) Set (3) Set (4) Set (5) (6) Sort(o). (7) (8) (9) Insert (10) (11) (12) Insert (13) (14) (15) (16) (17) (18) Calculate the entropy value of (19) (20) Sort data objects according to the entropy value. (21) (22) Set candidate = false; (23) (24) (25) break; (26) (27) Erase (28) (29) Set candidate = true; (30) (31)
4.3. Partitioning Step
In the partitioning step, we can reduce the number of candidate objects once again by partitioning the skyline layer, obtained in the skyline layering step, into m subregions. We partition the skyline layer because the number of skyline layer objects in each subregion is smaller than that of the entire skyline layer. We partition the region using
4.4. Computing Step
In the computing step, we compute the convex hull over the skyline layer objects in each subregion m times to find the aCH-Index and then merge the results of each subregion. The layer size of the aCH-Index becomes larger than that of the convex hull, but computing time of the aCH-Index is faster. The aCH-Index also includes all objects of the convex hull.
4.5. Convex Hull in WSN
In this section, we explain an example of convex hull in WSN as the two-dimensional space using aCH-Index. Let us consider an example of an aggregator node selection in Figure 3. There are 12 sensor nodes, and they have two attributes such as computing capability and battery life. We first construct aCH-Index over the sensor nodes.

An example of aCH-Index on sensor nodes.
Figure 3 shows an example of convex hull sensor nodes that are represented as points in the two-dimensional space. The x-axis represents computing capability and y-axis represents battery life. As shown in Figure 3, we construct aCH-Index over the sensor nodes. The sensor nodes
Consider a top-1 query to find the aggregator node, which has the highest computing capability and battery life. The sensor node
5. Performance Evaluation
We first explain the data and environment used in the experiment in Section 5.1. We then demonstrate the results of the experiments in Section 5.2.
5.1. Experimental Data and Environment
We perform experiments using a synthetic dataset. For the synthetic dataset, we generate uniform dataset (UNIFORM) by using the generator introduced by Bhaniramka et al. [22]. The dataset consists of four-, five-, and nine-dimensional dataset of 1 K, 10 K, and 100 K objects.
We compare the computing time and the
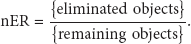
Here, {eliminated objects} is the objects filtered by the skyline layering step, and {remaining objects} is the objects not contained in the layer of the CH. To calculate the
We have implemented the aCH-Index and the convex hull using C++. To compute convex hull, we used the Qhull library [13]. To compute skylines, we used the SFS algorithm [14]. We conducted all the experiments on an Intel i5-760 quad core processor running at 2.80 GHz Linux PC with 16 GB of main memory.
5.2. Results of Experiments
We measure the
Experiment 1.
Figure 4(a) shows that the
The comparison of the
Experiment 2.
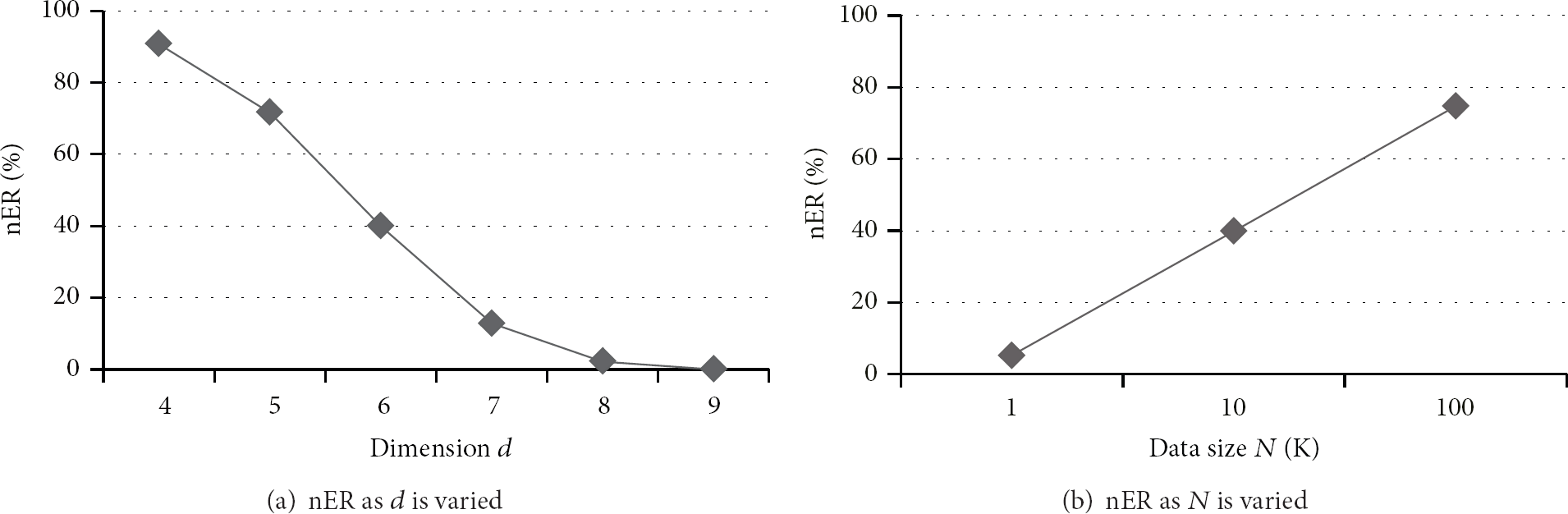
Computing time as dimension d is varied.
Figure 5 shows that the computing time of the aCH-Index and the CH as d is varied from 4 to 9. The aCH-Index improves by 7.97 times over the computing time of the CH on average. Especially the aCH-Index improves by 28.76 times over the computing time of the CH when d is 9. The difference of the computing time becomes big as dimension d increases.
The comparison of the time as d is varied.
Experiment 3.
Computing time as data size N is varied.
Figure 6 shows that the computing time of the aCH-Index and the CH as N is varied from 1 K to 100 K. The computing time of the aCH-Index improves by 1.58–39.26 times over that of the CH.

The comparison of the time as N is varied.
6. Conclusion
In this paper, we have formulated the selection process of the aggregator nodes as a top-k query processing problem. In order to solve it, we have proposed an efficient index building algorithm for selection of aggregator nodes, called aCH-Index. Our approach selects a set of aggregator nodes according to their attributes, such as distance from the base station, power consumption, battery life, and communication cost. Thus, we can reduce large amounts of communication traffic by sending only the aggregated data through selected aggregator nodes, instead of individual sensor data, to the base station. We have performed experiments on a synthetic dataset by varying the data size and the dimension. Experimental results show that aCH-Index reduces the number of candidate objects and improves the computing time compared to the convex hull.
Footnotes
The Notations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science, and Technology (no. 20110002707).