
Abstract
This study proposes an efficient position estimation method for localizing a mobile node in indoor environment. Although several conventional methods have been successfully applied for position estimation, they have some drawbacks such as low extendibility in an indoor space, intensive computation, and estimation errors. We propose a precise estimation approach based on a localization sensor and artificial landmarks. In our approach, a mobile node autonomously measures the location of landmarks attached to the ceiling with a localization sensor while moving across the landmarks and building a landmark map. And then, the node estimates its location under the ceiling using the map. In this process, we use a landmark histogram and a Kalman filter to reduce estimation errors. Several experiments performed using a mobile robot successfully demonstrated the feasibility of our proposed approach.
1. Introduction
A sensor node in wireless sensor network performs some processes inside its given location, gathers sensory information, and communicates with other connected nodes in the network. On the other hand, a mobile sensor node moves around its given space to perform duties along with above tasks. Hence, it should be capable of measuring a global map of their moving area and estimating their physical location anytime. In recent years, many efforts have been made to deal with such a localization problem. In particular, the localization issue has been directly towards mobile robotics as a fundamental research topic [1–4].
There are efficient localization algorithms for indoor and outdoor environments. Common global positioning system (GPS) is representatively applied for precise outdoor localization. Although GPS is a standard localization system, it often fails in indoor environments due to fading and multipath of GPS signals. The main line of research on indoor localization is to use odometer information obtained from infrared and ultrasonic sensors [5, 6]. However, this approach requires high cost and also gives high risk because its performance is directly affected by the correctness of odometer information. A study proposed a sensor network based localization that uses a multiple sensor nodes adopting low-priced sensors [7]. This approach provides very efficient performance in installed sensor network environments, but its scalability is restricted due to a limited number of sensors.
A few methods take advantage of landmarks and a distance measurement sensor [8, 9]. First, several artificial landmarks are attached to the ceiling. Each landmark possesses its discriminate form to be distinguished from other landmarks. Mobile nodes identify their location by recognizing the landmarks based on distance information obtained from a distance measurement sensor while they move under the ceiling. This approach provides stable localization performance with low cost and it can cope with larger areas for localization by extending the number of landmarks. In this study, we address several drawbacks of conventional landmark-based approaches and propose a better approach.
The remainder of this paper is organized as follows. Section 2 introduces several drawbacks of conventional landmark-based localization approaches. Section 3 and Section 4 explain our proposed method for autonomous position estimation of a mobile node. Section 5 describes experimental setup and results. Finally, conclusions are presented in Section 6.
2. Drawbacks of the Conventional Landmark-Based Localization Approaches
Conventional landmark-based approaches have several drawbacks in real-world environments. The localization performance is greatly affected by the correctness of landmark recognition. The most ideal arrangement of landmarks is to form a grid, but this is not an easy task for a human. Incorrect location of landmarks produces a dead zone or an overlap zone that negatively affects the landmark recognition. Misrecognition of landmarks may induce a mobile node to make a localization error. In addition, the distance sensor might generate distance measurement error, when a node sways or vibrates during movement.
To solve these problems, this paper proposes a map creation procedure with which a mobile sensor node autonomously creates a global map of landmarks for itself. We also propose a precise position estimation method to remove position errors and distance measurement errors.
3. Self-Creation of a Global Landmark Map
A global landmark map means the position of each landmark on the ceiling. A mobile sensor node's self-creation of a global landmark map can assist the node in correctly estimating its position. To introduce our proposed procedure for the self-creation of the map, we make several environmental assumptions. First, the ceiling that landmarks are attached to is a flat surface. Second, the node moves around a flat ground that is parallel with the ceiling. Finally, the mobile node recognizes one or two landmarks in real time while moving under the ceiling and estimates its absolute position in the two-dimensional global map with the coordinates of the recognized landmark(s). Figure 1 represents a coordinate system in which a mobile node estimates its position according to the assumptions.

Coordinate system for a node's self-creation of a global map.
Figure 2 describes a location of a mobile node in landmark coordinate system. As shown in this figure, the coordinate system of a landmark

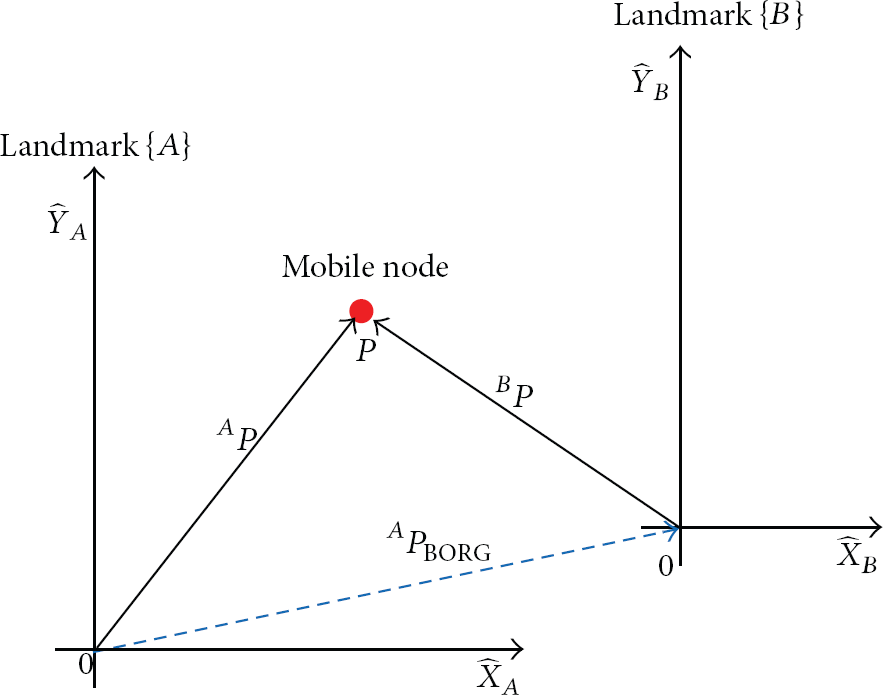
Mobile node's estimation of landmark position.
This vector means a relative coordinate of the origin of
The node should firstly detect and recognize the landmarks before estimating the relative coordinates of landmarks. In general, the node detects the same pair of landmarks several times. For this reason, an average value of relative coordinates that were estimated in each time provides more accurate position of corresponding landmarks. The average value Marklocal is described as
Finally, relative coordinates of respective landmarks located on the ceiling can be described as

4. Precise Position Estimation of a Mobile Node
A mobile node can estimate its position based on the global landmark map. For more precise position estimation of a mobile node, we apply two approaches.
4.1. Removal of Position Errors
While moving under the ceiling, a node first should recognize the landmarks through image processing to estimate its position. A lot of position estimation errors occur due to misrecognition of landmarks. We propose a method to remove position errors caused by incorrectly recognized landmarks. The node estimates its position by recognizing the nearest ceiling landmark while it navigates. At this time, an incorrect recognition of landmarks occurs by dead zone or overlap zone. An observation probability (

Figure 3 shows the histogram of consecutive landmarks detected during a node's navigation. A threshold obtained from this result can be used to remove the position errors caused by incorrectly recognized landmarks by removing landmarks (
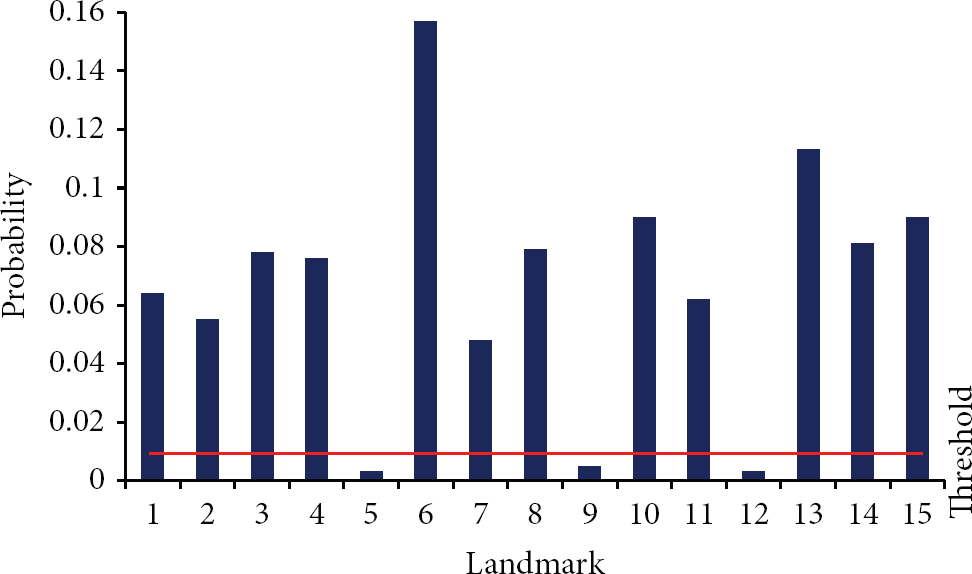
Histogram of consecutive landmark.
4.2. Removal of Distance Measurement Errors
Distance measurement errors occur when a node sways or vibrates during movement. Thus, we estimate the state variable value of the dynamic system as input with incoming noise through the sensor using a Kalman filter [10] and estimate the precise position of the mobile node. The state variable value is expressed as
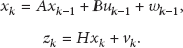

Given the state variable value


5. Experimental Results
In order to evaluate the proposed position estimation method, we set up experimental environment by attaching 12 landmarks on a ceiling (7.45 m × 6.07 m × 2.4 m) as in Figure 4.

Experimental environment.
To simulate a mobile node, we designed a type of a mobile robot equipped with four wheels. The body size of the node is W500 × D600 × H500. It can move by itself with a high speed up to 1.5 m/sec. At the top of the node, a distance measurement sensor, StarGazer, is mounted. StarGazer recognizes one or two landmarks and calculates the absolute distance between the node and landmarks at 10 times in every second. Table 1 shows the specification of the mobile node, and Table 2 describes the specifications of StarGazer.
Specification of the mobile node.

Specification of StarGazer.

Table 3 shows the performance of self-creation of a global landmark map using actual values and estimated values of respective landmarks and the distance error for each landmark. The average distance error is relatively low at less than 10 cm (0.0993 m), demonstrating the reliable performance of the map creation method.
The performance of the proposed map creation method.

Figure 5 illustrates a global map of the ceiling obtained from the estimation values. Each number represents the landmark ID.

Global landmark map of the ceiling.
Figure 6 shows a moving trajectory of the mobile node, which was estimated when it moves from landmark ID 544 to landmark ID 66 during 68 seconds.

Moving trajectory of a mobile node.
Figure 7 shows a histogram of consecutive landmarks investigated while the node moves. In this figure, landmarks indicating small numbers are due to incorrectly recognized ID.

Histogram of consecutive landmarks.
Figure 8 represents the position of the mobile node when a threshold obtained from the histogram of Figure 7 was applied. In this figure, the measurement noise still remains due to shaking or vibration of the node. Thus, we attempted to remove the measurement noise using a Kalman filter and estimated the average and standard deviation of the position noise and distance noise of the mobile node. As shown in Table 4, more accurate position was estimated by removing distance noise (approximately 0.08 m) using the proposed algorithm.
Position and distance noise of a mobile node.


Measured position of mobile node (processing of incorrectly recognized ID).
Figure 9 shows experimental results of autonomous navigation to a goal point. The red circles represent the starting point and the goal point, and the black rectangle represents obstacles used for this experiment. The mobile node successfully navigates toward the goal point, avoiding obstacles with accurate position estimation.
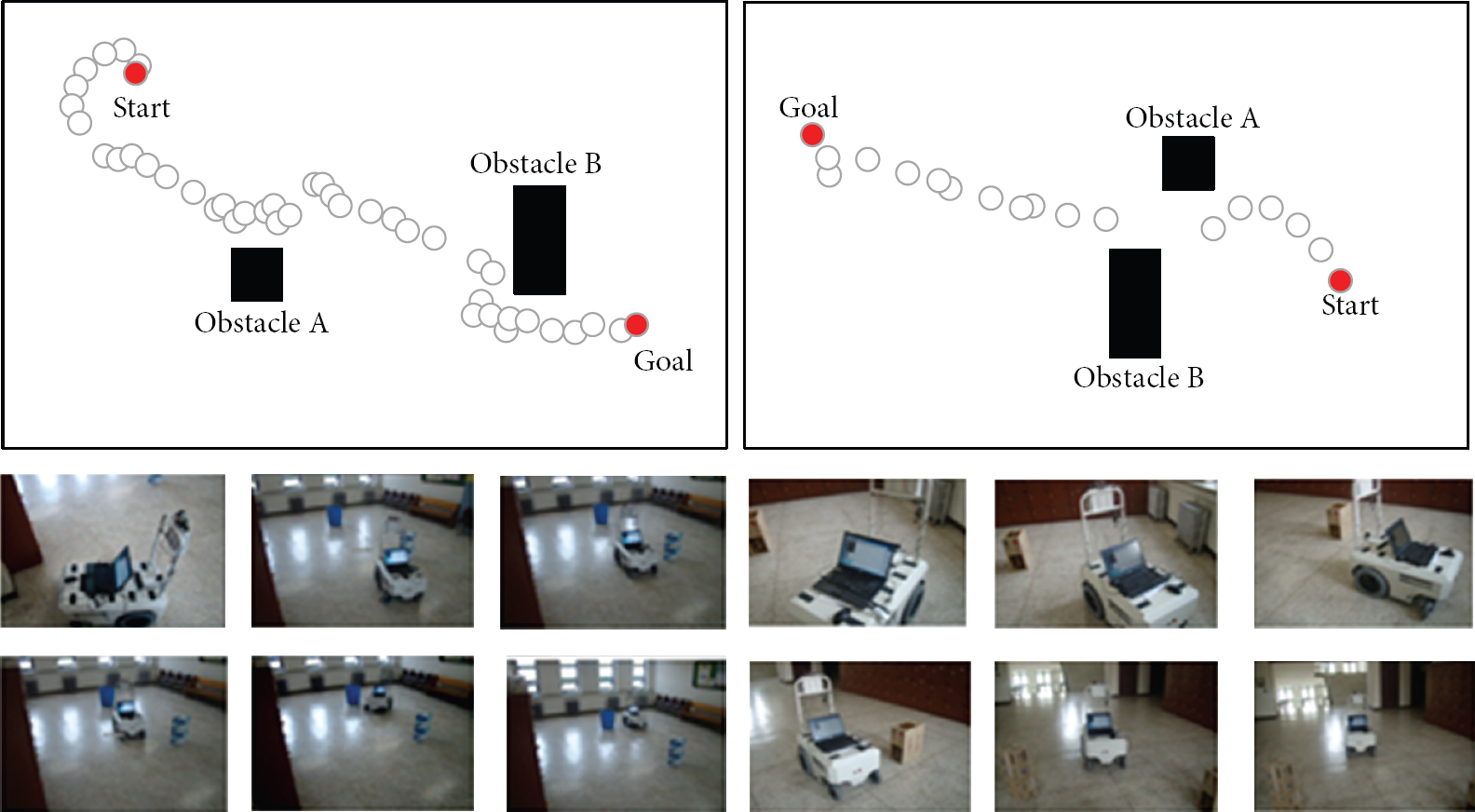
Experiment of goal point tracking.
6. Conclusion
In this study, we proposed an efficient position estimation method for a mobile node's localization based on landmark approach. The method supports the mobile node to autonomously create a global landmark map, while the node moves around the ceiling and searches for every landmark. To cope with position estimation errors, misrecognized landmarks are removed based on a threshold determined by a landmark histogram. In addition, we remove distance measurement errors using a Kalman filter.
We simulated an experimental environment for the verification of the proposed position estimation approach. The method for a mobile node's autonomous creation of a global map was successfully verified, indicating a small difference between actual landmark position and estimated position. Estimation errors were significantly reduced by the histogram and Kalman filter-based approach. We also observed that the mobile node successfully navigates toward any goal points while avoiding obstacles.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported by the Converging Research Center Program through the Ministry of Science, ICT, and Future Planning, Republic of Korea (2013K000358) and Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science, and Technology (MEST) (2011-0013776).