
Abstract
Decision fusion has been adopted in a number of sensor systems to deal with sensing uncertainty and enable the sensors to collaborate with each other. It can distribute computation workload and significantly reduces the communication overhead. However, some variants of decision rules such as Voting, Bayes Criterion, and Neyman-Pearson require a priori knowledge on the probability of targets presence which is still an open issue in detection theory. In this paper, we propose a binary decision fusion scheme that reaches a global decision by integrating local decisions made by fusion members. The optimal local thresholds and global threshold are derived by using the Minimax criterion based analysis while they are ensuring false alarm rate constraint, without a preestimated target appearance probability. Simulation results show that our scheme can improve the system performance under certain constraints, which can guide the threshold selection for implementing WSN systems in mission-critical applications.
1. Introduction
Wireless sensor networks (WSNs) for mission-critical applications such as security surveillance [1], environmental monitoring [2], and targets detection/traction [3] often face the challenges of meeting stringent performance requirements imposed by the applications. However, the actual sensing quality of sensors is difficult to predict due to the uncertainty in physical environments. For instance, the measurements of sensors are often contaminated by noise which renders the detection performance of the systems. Real-world experiments using MICA2 motes showed that the false alarm rate of a network is as high as 60% when sensors make independent decisions [1].
As an effective technique to improve the performance of distributed WSNs, data fusion [4] has been proposed by jointly considering the measurements of multiple sensors in the uncertain ambient. For example, in the DARPA SensIT project [5], advanced data fusion techniques have been employed in algorithms and protocols designed for target detection [3, 6], localization [7], and classification [8, 9]. There is also a vast of work on stochastic signal detection based on multisensor data fusion. Early work [4, 10] focused on small-scale sensor WSNs. Recent studies on data fusion have considered the specific properties of WSNs such as sensors' spatial distribution [8, 9, 11] and limited sensing/communication capability [6]. However, as one of the most fundamental issues in WSNs, the design of data fusion scheme which maximizes the system performance of given network remains fundamentally challenging.
In general, the strategies of data fusion can be categorized into value fusion and decision fusion [12]. In value fusion, all members transmit the raw measurements to the fusion center which is responsible for fusing and making the final decisions. However, the centralized data collection and processing on fusion center lead to unbalance on system workload and recourses allocation. Unlike value fusion, decision fusion strategy only transmits the local binary decision results made by fusion members to the head, which reduces the communication overhead and distributes the computing workload. However, many existing decision fusion methodologies are derived from some variants of decision rules such as Voting, Bayes Criterion, and Neyman-Pearson [12–15]; those are hard in practice as they require a priori knowledge on the probability of target presence, whose estimation may be inaccurate and is still an open issue in detection theory [4, 16].
In this paper, we propose a decision fusion scheme for balancing the workload of distributed sensors as well as concise communicating transmission. Specifically, a binary decision fusion scheme reaches a global decision by integrating local decisions made by fusion members. To obtain the optimal detection cost of system, we deduce the method to calculate the proper local thresholds on the fusion members and the optimal global threshold on fusion heads, respectively, to minimize the system detection cost, under certain system false alarm rate constraints. Unlike Bayes Criterion or Neyman-Pearson rules, the thresholds in our scheme can be obtained by a simple training procedure on the system configuration, without requiring hard expected priori knowledge on the probability of events occurrence. To verify our approach, we conduct extensive simulations based on different scenarios; our simulations show that comparing with the state-of-art [17], adopting analytical threshold proposed in this paper can improve the system performance significantly. The results are particularly useful in guiding practical implementation in which the proper threshold in decision fusion of wireless sensor networks can be sought under certain false alarm rate constraints.
The rest of the paper is organized as follows: system models and assumptions are presented in Section 2. Section 3 formulates the problems based on the fusion model. The solutions and technical approaches to derive the proper thresholds are discussed in Section 4. Numerical and simulation results are given in Sections 5 and 6, respectively. We conclude our work in Section 7.
2. System Model
2.1. Target and Sensing Model
The distributed wireless sensor network systems are composed with N uniform distributed sensors, which are interconnected by wireless links. Sensors perform detection by measuring the energy of signal emitted by the targets. However, the energy of most physical signals (e.g., acoustic and electromagnetic signals) attenuates with the distance from the signal source. Suppose that sensor i is
The signal strength measurements of a sensor are corrupted by noise. Denote the noise strength measured by sensor i is

In practice, the parameters of target and noise models are often estimated by using a training dataset before deployment. The measurements of sensors are obtained by averaging multiple samplings (≥30). Assume that the noises upon all sensors are independent; the samplings of sensor i follow distribution described below as



2.2. Local Decision Model
Sensor i compares the sampling

However, the decision made by local sensor i remains inaccurate as the noises are random. Suppose that


2.3. Multisensor Fusion Model
Data fusion [6, 19, 20] is widely employed in wireless sensor networks as an efficient technique which can improve the detection performance of the system. In fusion-based WSN system typically, sensors are clustered in groups around the group head (fusion center) and transmitting their sampling information to the head which hereafter makes the final decision.
This paper employs a simple decision fusion strategy, where sensors transmit their local decision to the fusion center which then compares the number of received positive decisions
At the system perspective view, the performance of system final decision is also evaluated by the global false alarm rate

Besides

3. Problem Statement
3.1. Bayesian Model and Minimax Criterion
Bayesian criterion [4, 16] is widely adopted in fusion-based detection system; the objective of Bayesian criterion is to minimize the expected system cost or risk in making decisions, which is denoted by

According to (11), the precondition of the Bayesian detection is the certain probability
Suppose that

Since

By letting

3.2. Problem Statement
According to the assumptions and decision models, the problem of this paper can be formulated as follows.
Suppose a surveillance WSN is composed by N wireless networked sensors; the measurements and decisions of each sensor are mutually independent, α is the predefined upper bound of the global false alarm rate; for example, the local decision threshold the system global decision threshold
To satisfy (15), specifically, minimizing the system detection cost
4. Analysis and Solution
Based on the decision fusion model discussed above, when the targets are absent, the positive decision

According to De Moivre-Laplace theorem [21], when N is large enough,
The upper bound of global false alarm rate is

Similarly, the detection probability
Since
And the event missing rate is


Since
From above analysis we can see that the solution can not be solved out directly since there are many steps to obtain
(1) (2) (3) Sampling M times (4) average the samplings to obtain the mean and variance of noise by (4) and (5) (5) (6) Compute the local decision threshold δ by (18) (7) Compute the local detection probability (8) Average the (9) Computing global threshold (10) (11) (12) retrieve readings from member sensors, (13) report (14) (15)
The procedure of detection can be divided into two phases, the training phase and detection phase. At the training phase, the system samples the interesting signals repetitively while there is no target. Each sensor calculates the mean and variance of the noise at their position using (4) and (5), respectively. The main purpose of training procedure is to measure the noise level of the environment and minimize the false alarm rate. To ensure that the training results are accurate in the further detection phases, we conduct case studies using the data traces collected in a real vehicle detection experiment [23]. In the experiments, 75 WINS NG 2.0 nodes are deployed to detect military vehicles driving through the surveillance region. Figure 1 depicts the noise energy occurrence percentage collected by sampling 1000 times while there is no vehicle. From it we can see the noise signal fitting the normal distribution with zero mean, and it is also found that the noise mean and variance are stable after 500 samplings are received, which will guide the training procedures in further simulations.
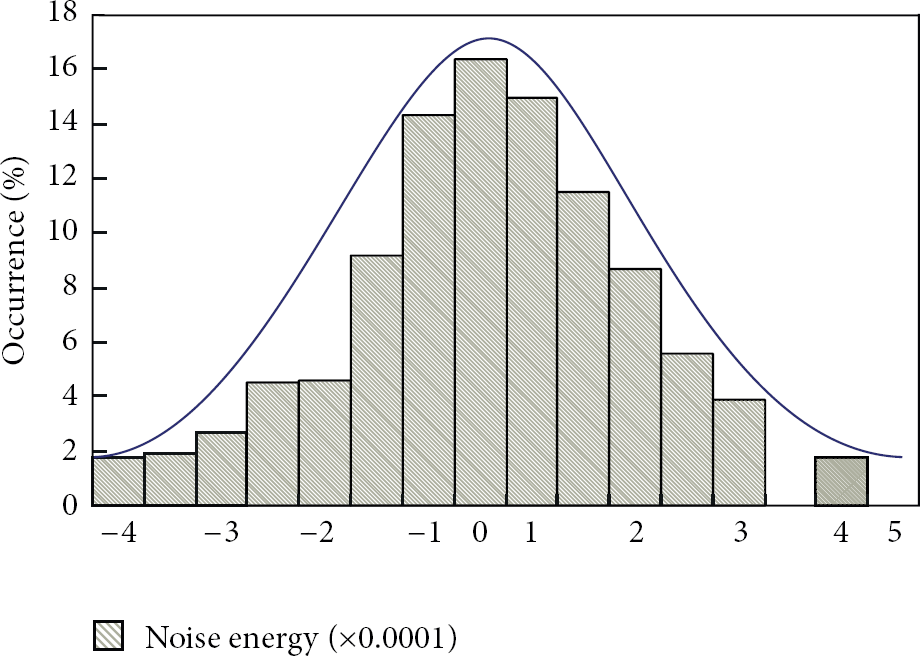
Acoustic noise feature.
After the noise features are observed, local sensors use (18) to solve out the local decision threshold δ and the local detection probability
At the detection phase, all sensors in fusion group sample the signal
Unlike the value fusion in which the fusion members do sampling and send mass of raw data to the fusion center, the low end sensors in Procedure 1 are responsible for not only sampling but taking local comparison. The transmission packet only contains the local decision result 0 or 1. As a consequence, this scheme can fairly distribute computing overhead among individual sensors and reduce communication cost as binary information is transmitted.
5. Numerical Results
In this section, we conduct numerical experiments to evaluate the performance of our optimal threshold decision fusion scheme proposed in Section 4.
The parameters of signal decay are set as follows:
Detection probability with decision thresholds.

The system false alarm rate
Performance versus fusion number.

6. Simulation Results
To evaluate the performance of the scheme proposed in Section 4, we conduct extensive simulation experiments. The scenarios of simulations are set in a 100 m × 100 m square area with 30 sensors which are randomly placed. The parameters of decay model are set to
Figure 2 depicts the receiver operating characteristic curve (ROC) of

Receiver operating characteristic (ROC) curves.
Besides the false alarm rate, noise is another main factor that influences the system performance of detection scheme. To evaluate the influence upon decision performance by different noise ground, we simulate the detection results alone, with different settings of SNR, and draw Figure 3. The signal noise ratios are set from 0.1 to 4,
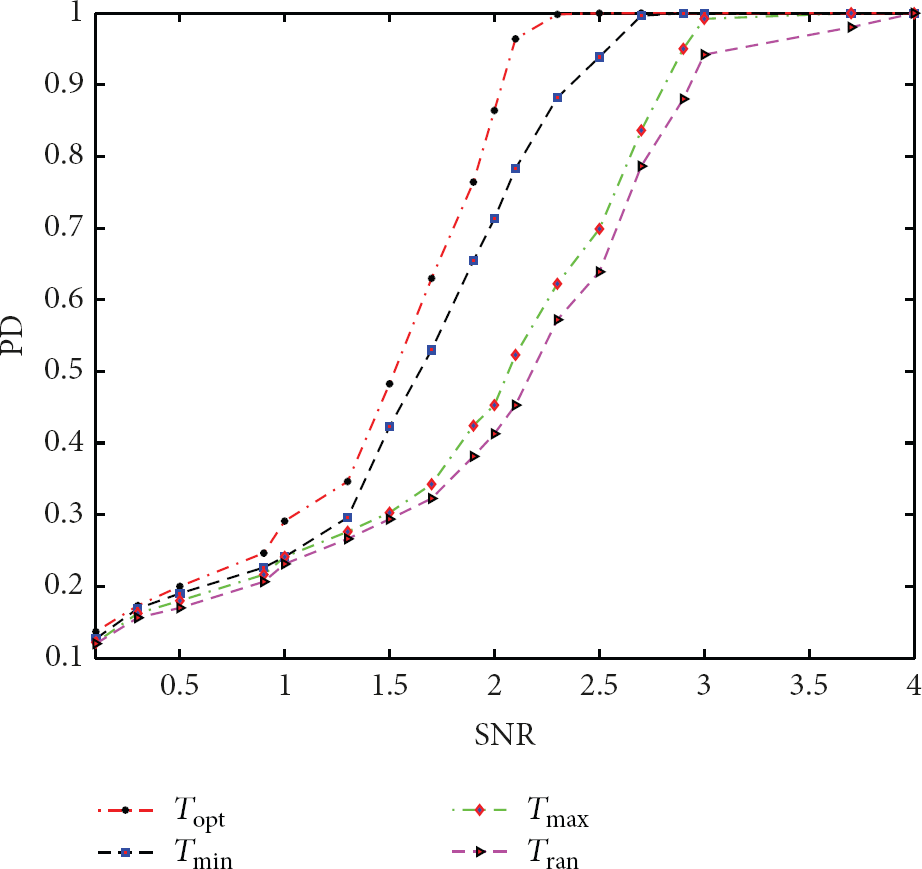
Performance versus signal noise ratio.
7. Conclusion
This paper explores the use of decision fusion to address the limitation of performance drops caused by noise-contaminated surveillance by wireless sensor networks. In our approach, we adopt a distributed decision fusion scheme which can balance the workload on each sensor. Meanwhile the data transmitted in our scheme are fewer than traditional value fusion. To improve the system performance, we have deduced the optimal decision threshold according to minimax criterion. The effectiveness of our approach is validated by numerical results and extensive simulations.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The work described in this paper was partially supported by the National Nature and Science Foundation of China under Grants 61163056, 61365008, and 61202350, the Grants 20114BAB211018 and 20123BBE50093 from Jiangxi Province, and the Grant GJJ12324 from The Bureau of Education of Jiangxi.