
Abstract
The main function of a vehicle suspension system is to isolate the vehicle body from external excitation in order to improve passenger comfort and road holding and to stabilise its movement. This paper considers the implementation of an adaptive neuro fuzzy inference system (ANFIS) with a fuzzy hybrid control technique to control a quarter vehicle suspension system with a semiactive magneto rheological (MR) damper. A quarter car suspension model is set up with an MR damper and a semiactive controller consisting of a fuzzy hybrid skyhook-groundhook controller and an ANFIS model is also designed. The fuzzy hybrid controller is used to generate the desired control force, and the ANFIS is designed to model the inverse dynamics of MR damper in order to obtain a desired current. Finally, numerical simulations of the semiactive suspensions with the ANFIS-hybrid controller, the traditional hybrid controller, and passive suspension are compared. The results of simulations show that the proposed ANFIS-hybrid controller provides better isolation performance than the other controllers.
1. Introduction
To isolate a conventional vehicle suspension system from any external excitation, the system is constructed from three main components:
a spring-type element,
a damping element,
a set of mechanical elements which link the body (sprung mass) to the tire system (unsprung mass).
Vehicle suspension may be classified as either active or semiactive, and when it is modified electronically with energy injection, it is called active suspension. The external energy needed to produce controlling forces must be considered when designing the controller because an active suspension system can potentially be far better than its passive counterpart.
Besides this, when the damping or spring element coefficient can be adjusted, unlike a conventional or passive suspension, or without needing large power sources like an active suspension, they cannot destabilise the suspension system. In this instance the suspension system is classified as semiactive [1].
A magneto rheological (MR) fluid damper is used most frequently in semiactive suspension as a nonlinear component, and due to its hysteresis and nonlinear behaviour, accurately modelling the force-velocity curve is not a trivial task [2].
Generally, MR fluid is fabricated by mixing silicon oil and iron particles. MR fluids change their properties when subject to a magnetic field, but for control, it is only necessary to activate the solenoid with a normal battery.
Many researchers have been devoted to develop appropriate control algorithms for semiactive suspensions with MR damper. Skyhook control strategy was first introduced by Karnopp who suggested the controller be mounted between the sprung mass and a stationary sky. Skyhook control algorithm can drive the system performances to be as good as that of an active control strategy, though it lowers the cost [3]. Over the last several decades, skyhook control scheme was widely studied and used by researchers. Guo implemented the skyhook controller into a vehicle suspension system in which the biviscous and hysteretic MR damper model is used [4]. Abramov proposed an on-off skyhook and continuous skyhook controller which improved the ride comfort but failed to improve the handling stability of the vehicle [5].
To overcome the limitations of skyhook control, other researchers discovered groundhook and hybrid controllers. groundhook control, as investigated by Valasek, added another fictitious damper between the unsprung mass and the ground which improved the road holding ability of a vehicle. The skyhook controller was then improved using a hybrid control approach that was a tradeoff between the skyhook control approach and a groundhook control law [6]. Ahmadian and Herran studied this control policy on a quarter car model and noted that hybrid control can provide independent damping to sprung and unsprung bodies. This research indicated that this control method could control the suspension dynamics far better than either skyhook or groundhook control [7, 8]. Extensive theoretical and experimental studies of the performances of different types of semiactive skyhook, groundhook, and hybrid controllers can be found in the literature [9–12].
In addition, to address the hysteresis and nonlinear behaviour on the MR dampers and also some uncertainty factors in the semiactive suspension system, many control strategies based on fuzzy logic control were developed. First, Biglarbegian researched a neuro fuzzy (NF) control strategy for a quarter car model and conducted an experimental evaluation with a semiactive suspension system (SASS) [13]. Second, Tusset studied control strategies for nonlinear vehicle suspension with an MR damper [14]. Then, Khajavi became concerned with a proposed fuzzy logic semiactive suspension system designed for a specific automobile with a passive suspension system [15]. Reference [16] also proposed a fuzzy controller with fuzzy rules, which were then evaluated using the Matlab fuzzy logic control toolbox. Reference [17] presented a Takagi-Sugeno (T-S) fuzzy model for the analysis of a quarter car semiactive suspension with an MR damper. Lastly, Rashid developed a hybrid fuzzy logic plus proportional-integral-derivative (PID) controller to analyze a similar quarter car model [18]. These studies indicated that the vertical acceleration of the body was reduced by using a fuzzy control on semiactive suspension, and the ride comfort and handling is also improved.
Referring to the results of the Hook group research, the hybrid control strategy improved the passenger comfort as well as road holding; the problem of determining the weighting factor remained. The weighting factor η is usually determined by trial and error, so there is no systematic method for adjusting it. This meant that developing a controllable suspension system would be time consuming and very difficult.
This paper therefore proposes a new methodology that allows for the systematic design of a hybrid control strategy for semiactive suspensions using the fuzzy logic method. Fuzzy logic controllers do not require accurate mathematical models and can easily deal with the nonlinearity and uncertainties of the controlled systems which are inherent in a semiactive car suspension system with an MR damper.
The first step in this new methodology is to design a fuzzy hybrid skyhook-groundhook control, where the desired control force is generated by weighting the outputs of a fuzzy skyhook controller and a fuzzy groundhook controller in terms of the Takagi-Sugeno-Kang fuzzy method. The second step is then to design the adaptive neuro fuzzy inference system (ANFIS) to model the inverse dynamics of MR damper and generate the desired control current, which is sent to the MR damper. The performance of the suspension system is validated and evaluated by means of numerical simulations.
The remainder of this paper is organized into six sections. First, in Section 2 the structure of a general semiactive vehicular suspension system is presented and a proper MR damper model is explained. The new control strategy is introduced in Section 3. The real-time implementation results and corresponding analyses are also given in this section. Finally, the adaptive neuro fuzzy controller is implemented in Section 4. The results of the simulation, showing the efficiency of the new controller, are also presented in the same section.
2. Semiactive Vehicle Suspension System
2.1. Quarter Car Model
A two degree of freedom quarter car is a simple model with a suspension designed to simulate the vertical motion of a chassis and wheel without taking into account the pitch or roll vibration modes. It is very useful for a preliminary design, as Figure 1 shows.

Quarter car suspension model.
The dynamics of a quarter car is governed by the following equations:

where ms is the sprung mass (car body), mu is the unsprung mass (wheel), ks is the spring stiffness constant, kt is the tire stiffness constant, F d is the control force of the MR damper, x2 is the sprung mass displacement, x1 represents the unsprung mass displacement, and xin is the road profile.
2.2. MR Damper Model
MR dampers are highly nonlinear devices with a force-velocity relationship that exhibits a hysteretic behavior which is not easy to model mathematically. Hysteresis can cause serious problems in controlled systems such as instability and loss of robustness. Modelling MR dampers has been an active field over the few last years with several solutions having already been proposed. One model that is numerically tractable and has been used extensively for modelling hysteretic systems is the Bouc-Wen model. The Bouc-Wen model is extremely versatile and can exhibit a wide variety of hysteretic behaviour. To better predict how the damper will respond, a modified version was proposed by [19], as shown in Figure 2. To obtain the governing equations for this model, only the upper section is considered.
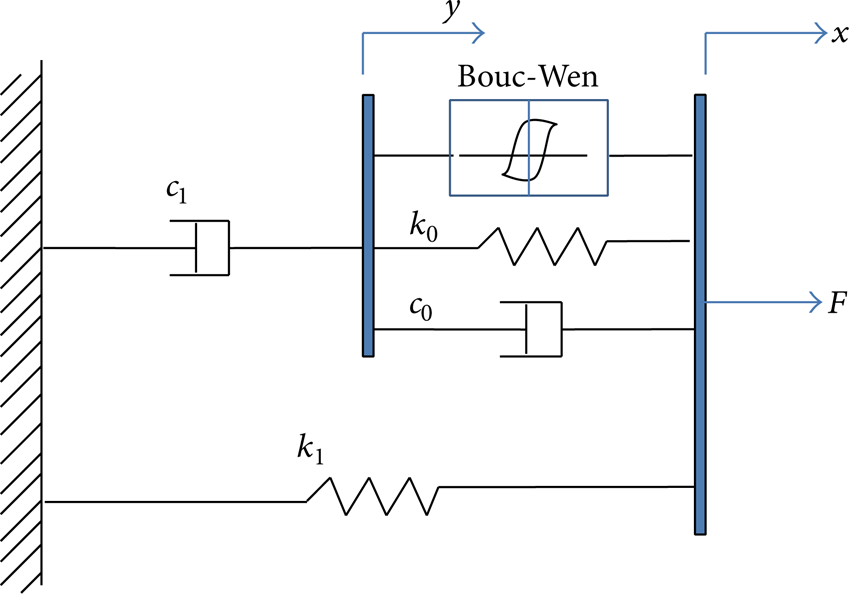
MR damper modified Bouc-Wen model.
The modified Bouc-Wen model can be used to develop a semiactive control model for an MR damper attached to the semiactive suspension of the quarter car. The forces on either side of the rigid bar are equivalent, and, therefore,

where the evolutionary variable z is governed by

Solving for

The total force generated by the system is then found by summing the forces in the upper and lower sections of the system in Figure 2:

The total force can also be written as

In this model the adjusting parameters are represented by γ, β, and A, the accumulator stiffness is represented by k1, and the viscous damping observed at larger velocities is represented by c0. A dashpot, represented by c1, is included in the model to produce the roll-off that was observed in the experimental data at low velocities, k0 is present to control the stiffness at large velocities, and x0 is the initial displacement of spring k1 associated with the nominal damper force due to the accumulator.
3. The Proposed Control Strategy
In this section, two fuzzy controllers based on skyhook and groundhook schemes are designed and developed, respectively. Then Takagi-Sugeno-Kang (TSK) fuzzy method is used to give a hybrid force which is related to fuzzy-skyhook force and fuzzy-groundhook force. Following the design of controller, the theoretical analysis for the adapative neuro fuzzy inference system (ANFIS) is provided, and the inverse dynamics of the MR damper is modelled by using ANFIS. Figure 3 shows the overall schematic diagram of the ANFIS hybrid control system.

ANFIS hybrid control block diagram.
3.1. Fuzzy Controller Design
Generally, traditional skyhook method is mainly used to control the sprung body so as to keep the ride comfortable. Groundhook control, however, aims to control the unsprung mass in order to enhance vehicle stability. Additionally, traditional hybrid control force is defined as the weighted sum of the skyhook force and groundhook force. The main problem is to determine an optimal value so as to balance the skyhook and groundhook. These group control strategies are described in Figure 4.

Hook group controllers scheme.
The skyhook control and groundhook laws are described separately as


where
The control law of hybrid strategy can be stated simply as

where η∈(0, 1) is the tunable hybrid weighting factor that balances the effect of skyhook and groundhook control methods to improve ride comfort and handling stability.
The fuzzy controller is designed upon the skyhook and groundhook theory. For the fuzzy-skyhook controller, the velocity of sprung mass (car body) and the relative velocity between sprung mass and unsprung mass are used as the fuzzy controller inputs and the output is designed to be the desired fuzzy-skyhook force. Similarly, the inputs of the fuzzy-groundhook controller are the velocity of unsprung mass (wheel) and the relative velocity between the sprung mass and unsprung mass; the output is the desired fuzzy-ground force. The universe of discourse of the input and output variables was selected based on the results of the simulation under different conditions. It was determined based on the amplitude of the open-loop responses within the minimum and maximum ranges of the signal. Furthermore, the suspension input was multiplied with the updated but correct gain to limit it to values between −1 and + 1. The universe of discourse for the fuzzy output was selected in the range of −100% to + 100%.
The fuzzy control design based on the Mamdani model has the following variables:
input variables based on a skyhook:
input variables based on a groundhook:
output variables: desired fuzzy-skyhook force and fuzzy-ground force.
A triangular membership is chosen for the input and output variables. Each variable is assigned seven values which are expressed by linguistic control rules as negative big (NB), negative medium (NM), negative small (NS), zero (ZE), positive small (PS), positive medium (PM), and positive big (PB). The fuzzy quantization level basically determines the number of primary fuzzy sets, and the number of primary fuzzy sets determines the smoothness of the control action which varies depending on the resolution required for the variable. The choice of quantization level has an essential influence on how fine a control can be obtained. Coarse quantization for large errors and finer quantization for small errors are the usual choice in the case of quantized continuous domains. By this method, 49 fuzzy rules were obtained for each fuzzy controller. To give an example, the 49 rules of the fuzzy-skyhook controller can be described as follows.
If
If
If
⋮
After obtaining the desired fuzzy-skyhook and fuzzy-groundhook forces, a method of Takagi-Sugeno-Kang fuzzy is used here to give a new hybrid force:
where
3.2. Adaptive Neuro Fuzzy Inference System Design
The damping force generated by the MR damper is mainly decided by the input current and the relative velocity and relative displacement of the piston. The operation of the MR damper by directly controlling the input current is possible, which is why it is very important to obtain the command current according to the desired force in actual use. Because of its universal approximation ability to a nonlinear system, the ANFIS method was utilized in this section to build the inverse MR damper model.
As an example, the architecture of a two-input two-rule ANFIS has been studied, as shown in Figure 5.
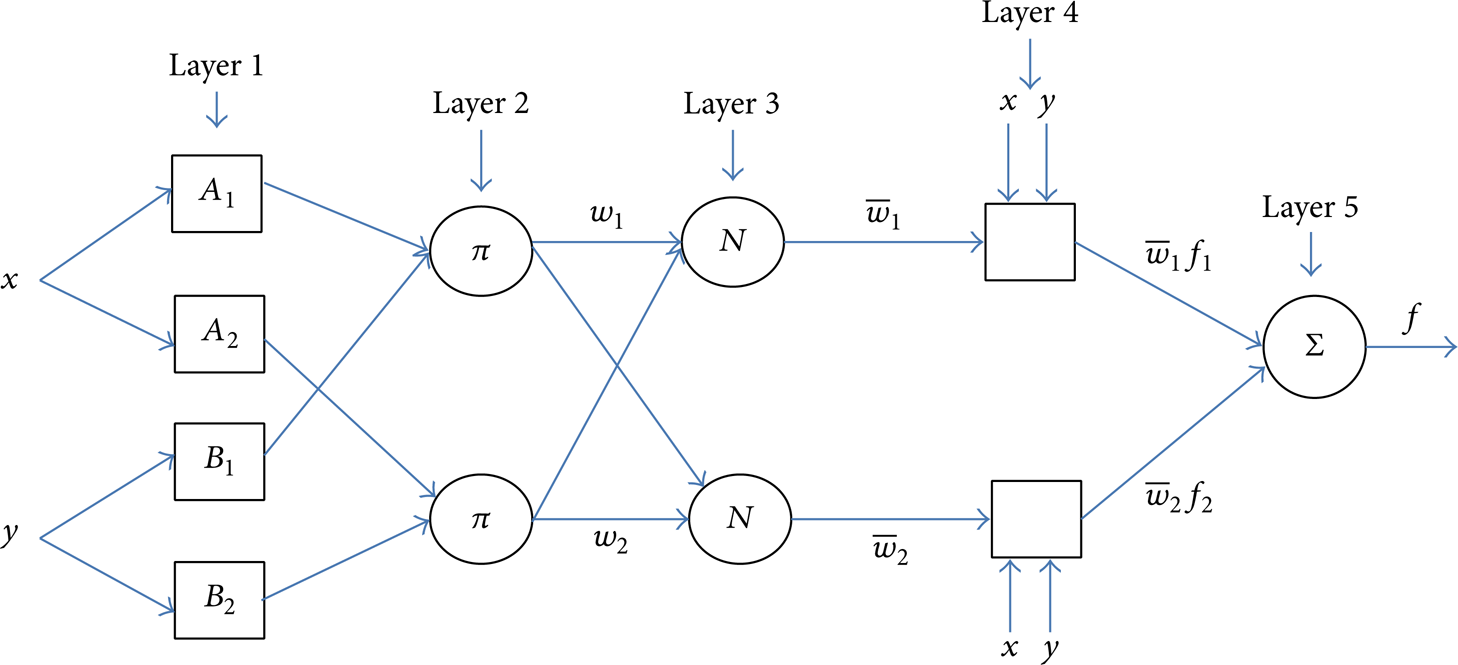
The architecture of a two input rule ANFIS.
ANFIS has five layers [20], where the node functions in the same layer are of the same function family, as explained below (note that O ij denotes the output of the ith node in the jth layer).
Layer 1 (Fuzzification). Every node i in this layer is an adaptive (square) node with a note function

or

where x (or y) is the input to node i and A i (or Bi–2) is the linguistic label (small, large, etc.) associated with this node. Here, a bell-shaped function with a maximum equal to 1 and a minimum equal to 0 was chosen, such that

where {a i ,b i ,c i } is the parameter set which can be changed to adjust the bell-shaped function.
Layer 2. Every node in this layer is a fixed (circle) node labeled π, whose output is the product of all the incoming signals:

Each node output represents the firing strength of a rule.
Layer 3. Every node in this layer is a fixed (circle) node labeled N. The ith node calculates the ratio of the ith rule's firing strength to the sum of all rules’ firing strengths

Outputs are called normalized firing strengths.
Layer 4. Every node i in this layer is an adaptive (square) node with a node function:

where
Layer 5. The single node in this layer is a fixed node labeled ∑, which computes the overall output as the summation of incoming signals:

Given the input/output data sets, ANFIS constructs a fuzzy inference system (FIS) whose membership function parameters are adjusted using a hybrid algorithm. Generally speaking, the more the inputs, the more accurate the inverse model, but as the inputs increase, the inverse model will become very complex and the training time will increase enormously. To balance model accuracy and time consumption, the inputs of the inverse model were chosen as the desired damping force based on fuzzy skyhook and fuzzy groundhook controller, the sprung mass velocity, unsprung mass velocity, and the relative velocity between sprung and unsprung mass, and the output is the desired current to the MR damper. The data used to train the inverse MR damper model are the sprung mass velocity, unsprung mass velocity, the relative velocity between sprung and unsprung mass, and the desired forces, which are generated from the simulation model under typical road conditions.
The output of the local basic was considered from a hybrid damping strategy

where kf is the output scale factor, O2 represents one fuzzy reasoning value for skyhook control, O1 represents one fuzzy reasoning value for groundhook control, η Oj and η Ok represent the weight of activated rules in skyhook control and groundhook control, respectively, and O j and O k are the output rules of skyhook control and groundhook control, respectively.
It is not easy to build an accurate model for a complex variety of α. Fuzzy reasoning was also used to modify α so that an appropriate damping force could be calculated with the same damping force way. According to the fuzzy control method, the membership functions for inputs and outputs must be defined. These fuzzy membership functions were defined for the following parameters: absolute velocity of the sprung mass and absolute velocity of the unsprung mass. In this control strategy, five trapezoidal membership functions were defined for each parameter: very small, small, medium, big, and very big.
The output of this fuzzy controller can be written as
where kα is the output scale factor, μ Hm represents the weight of the corresponding activated rules, Hα represents one fuzzy reasoning value, and H m is the corresponding output rule.
Finally, the drive current I of MR damper can be calculated on the basis of a model [21]:

where bi and ci are constants and v is approximately equal to
4. Simulation Results and Discussion
The numerical simulation of the quarter car suspension system on various roads was carried out in Matlab/Simulink. As shown in Figure 6, the numerical conditions consisted of step excitation, sinusoidal excitation, and bump excitation. Each control policy was evaluated for its performance at controlling the sprung mass and unsprung mass according to a set of evaluation criteria.

Road excitation model.
4.1. Road Excitation Model
For more details see Figure 6.
4.2. Simulation and Experimental Results
The parameters of the quarter car model and hydraulic actuator were obtained from [12] and listed as follows: k s = 16000 N/m, k t = 160000 N/m, m u = 36 kg, m s = 240 kg, c s = 980 Ns/m, α equals 0.8, Gsky = 2840 Ns/m, and Gground = 3280 Ns/m.
The simulation was performed using fuzzy logic toolbox of Simulink/Matlab. Figure 7 shows the overall simulation procedures. Three types of control systems were compared and evaluated, namely, the passive, hybrid, and ANFIS schemes. All the relevant parameters and conditions were kept the same for all the schemes to ensure a realistic and fair one-to-one comparison.

Simulink block diagram of the semiactive suspension.
It is generally considered to be an enhancement in system performance in riding comfort and road handling and vehicle stability if all the curves show a reduction in the amplitudes.
4.3. Discussion
The graphics in Figure 8 show further responses of the system with step function disturbance. Figure 8(a) shows the curve for sprung mass acceleration for all three schemes. In addition, the semiactive suspension with ANFIS control can also achieve a slightly smaller peak-to-peak acceleration than that of the hybrid and passive systems. When those reductions were compared to the passive and hybrid control suspension systems, they showed that the semiactive suspension system using the ANFIS control could improve the ride comfort under a road step function.

Graphic responses under step function road model.
Figure 8(b) explains the trend in tire deflection. Compared to the other control algorithms, ANFIS reduced tire deflection the most. Moreover, this controller achieved much better road handling than the hybrid controller and the passive one.
Figure 8(c) describes the sprung mass displacement response. It can be seen that the vibration of sprung mass was reduced and the ANFIS controller also improved stability slightly while reducing the sprung mass displacement. On this basis the control policy has integrated the control performance better than the other control strategies, it should be recommended.
For the system with the step function disturbances, the ANFIS controller rejected more than 70% of the amplitude, which is better than the hybrid controller and the passive system.
Figures 9(a) to 9(c) show the response of the system under sinusoidal disturbance. As with the step input disturbance, the performance of the system clearly indicates that the ANFIS scheme was much better than its counterparts at accommodating the introduced conditions. The magnitude of compensation was much greater than the step input. This further reaffirmed the robustness and effectiveness of the proposed scheme at controlling the vertical motion of the suspension system. Thus, it is expected that the new scheme could help to improve the vehicle riding comfort, road handling, and stability quite considerably.
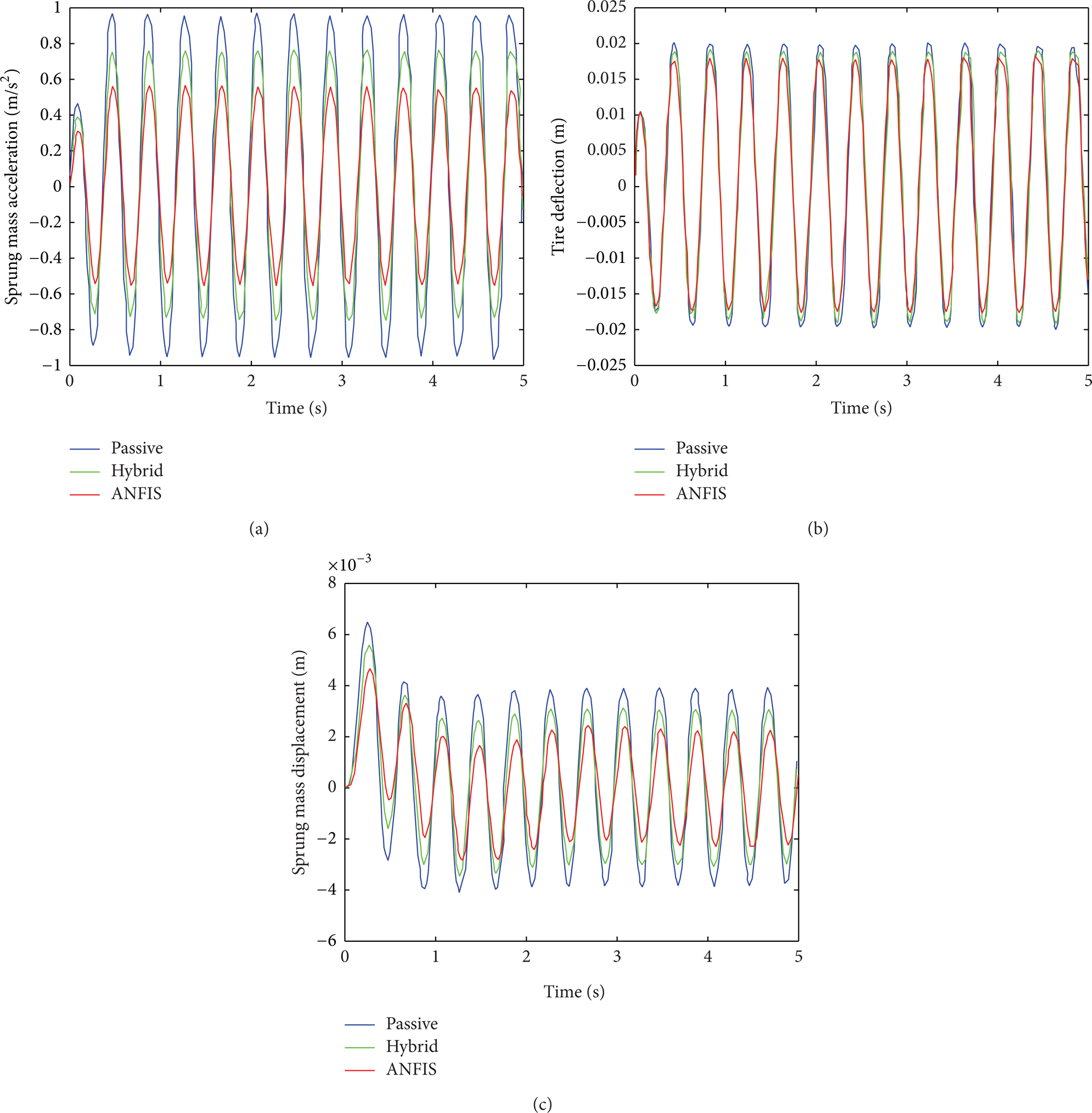
Graphic responses under sine wave function road model.
With the system having sinusoidal disturbances, the ANFIS controller rejected more than 75% of the amplitude, which is better than the hybrid controller, while the passive system only rejected a very small amount of the disturbance amplitude.
When the frequency of the bump excitation approached the frequency of sprung mass resonance, as shown in Figure 10(a), the semiactive suspension via ANFIS controller reduced the acceleration amplitude of the sprung mass vibration. With the tire deflection shown in Figure 10(b), the ANFIS controller can depress the frequency more effectively and reduce deflection better than the hybrid controller and the passive system. According to the result in Figure 10(c), the semiactive suspension with ANFIS controller can reduce the displacement of the sprung mass and, more importantly, this controller can greatly improve vehicle stability. Specifically, the ANFIS controller rejected more than 65% of the amplitude of the system with bump disturbances, which was again better than the hybrid controller and the passive system.

Graphic responses under bump road model.
When all the results were compared to the other two algorithms, the improvement in ride comfort and road handling was inferior to the other algorithms and the improvement in stability was superior to the cases with the other algorithms. This may be due to the fact that the design principle of this algorithm was based on the weighting between the skyhook control and the groundhook control. A suitable weighting factor for various road conditions was difficult to determine and therefore needs more effort in the future.
5. Conclusion
This paper has presented a simulation study using Matlab/Simulink of the adaptive neuro fuzzy inference system (ANFIS) with a hybrid control strategy to control a semiactive suspension control system. The numerical investigations involved an MR damper which utilized MR damper fields to improve the adjustable damping effects. This ANFIS method adopted a Takagi-Sugeno configuration with a hybrid learning method typically used in a neural network configuration. The simulation results have shown that the ANFIS-hybrid controller can suppress the worst case step, sinusoidal, and bump function road disturbances effectively, and hence it could handle other, less severe real road situations better than conventional controllers. This paper can declare that a semiactive MR damper suspension system can be extended and constructed from pilot plant scale to a passenger vehicle with improved ride comfort, road handling, and vehicle stability using ANFIS-hybrid controllers. An ongoing project via the development of a full working prototype is underway to practically verify and validate the simulation trends of the parameters of interest.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
The project is supported by an ARC Discovery Grant (Project no. DP140100303). The first author would like to thank the Directorate General of Higher Education, Ministry of Education and Culture, Republic of Indonesia, for supporting this study.