
Abstract
We study the bifurcation of periodic solutions for viscoelastic belt with integral constitutive law in 1: 1 internal resonance. At the beginning, by applying the nonsingular linear transformation, the system is transformed into another system whose unperturbed system is composed of two planar systems: one is a Hamiltonian system and the other has a focus. Furthermore, according to the Melnikov function, we can obtain the sufficient condition for the existence of periodic solutions and make preparations for studying the stability of the periodic solution and the invariant torus. Eventually, we need to give the phase diagrams of the solutions under different parameters to verify the analytical results and obtain which parameters the existence and the stability of the solution are based on. The conclusions not only enrich the behaviors of nonlinear dynamics about viscoelastic belt but also have important theoretical significance and application value on noise weakening and energy loss.
1. Introduction
The research about the nonlinear dynamics is one of the frontier application problems of the international dynamics area. Bifurcation of periodic solutions about nonlinear dynamics system is a powerful tool to investigate these problems. In recent years, there are also some progresses about periodic solutions of three-dimensional systems. In 1990, Chow et al. [1] studied a bifurcation of homoclinic orbits, which is an analogue of period doubling in the limit of infinite period. In 1991, Perdios et al. [2] investigated the families of three-dimensional periodic orbits which branch off the families of planar periodic around the triangular equilibrium point. In 1998, Mehri and Mahdavi-Amiri [3] showed that the reduced spatial three-body problem with one small mass is to the first approximation the product of the spatial restricted three-body problem and a harmonic oscillator by using the methods of symplectic scaling and reduction. In 2005, Liu and Han [4] considered a 3-dimensional system having an invariant surface, derived new formula of Melnikov function, and obtained sufficient conditions for the existence of periodic orbits. In 2009, Liu and Han [5] investigated the bifurcation of periodic solutions of a 4-dimensional system depending on a small parameter and gave a new method to use the Melnikov function. From 2009 to 2012, Llibre et al. [6–9] studied the bifurcation of periodic solutions from a class of systems which has a 4-dimensional center in 1: n resonance, p: q resonance, a 4-dimensional center in R n in resonance 1: n as well as the 2n-dimensional center, respectively. In 2013, Liu et al. [10] investigated the double Hopf bifurcation at zero equilibrium point and simulated the periodic solutions and 3-dimensional torus near the double Hopf bifurcation.
Viscoelastic belt system is an irreplaceable transmission device in the mechanical system and the belt is the core link part of the mechanical equipment. From the vehicles’ original machinery to the modern automatic equipment, products go through several changes and have abundant uses, so scholars around the home and abroad pay more attention to the features of nonlinear dynamics. In 1985, Ulsoy et al. [11] studied the stability of parametric vibration of a moving belt with a tensioner. In 1988, Wickert and Mote [12] studied the vibration and stability of axially moving materials. In 1998, Zhang and Zu [13, 14] studied the nonlinear vibration and stability of a parametrically excited viscoelastic belt by using the multiscale method. In 2004, Zhang et al. [15] investigated the bifurcation of periodic solutions and chaotic dynamics for a parametrically excited viscoelastic moving belt with 1: 3 internal resonance and obtained that there exist periodic, 2-periodic, 3-periodic, 5-periodic, and quasiperiodic responses and chaotic motions in viscoelastic moving belt. In 2008, Liu et al. [16] investigated the problem of the transverse nonlinear nonplanar oscillations of an axially moving viscoelastic belt with the integral constitutive law in the case of 1: 1 internal resonance.
In this paper, we use the bifurcation theories of high-dimensional system to investigate the existence and stability of the periodic solution of the viscoelastic belt with two degrees of freedom. In Section 2, we introduce the viscoelastic belt system and make the nonsingular linear transformation. In Section 3, we present the methods to study the bifurcation of periodic solutions; what is more, the conditions of the existence and stability of the periodic solution are obtained. In Section 4, we give the phase diagrams of the solutions under different parameters to verify the analytical results in Section 3. In Section 5, we summarize our results.
2. The System and Nonsingular Linear Transformation
We get the nondimensional nonlinear dynamical formulations of the viscoelastic belt by using the method in [16]:

where
By using the multiscale method, we obtain the average equations of viscoelastic belt in 1: 2 internal resonances as follows:
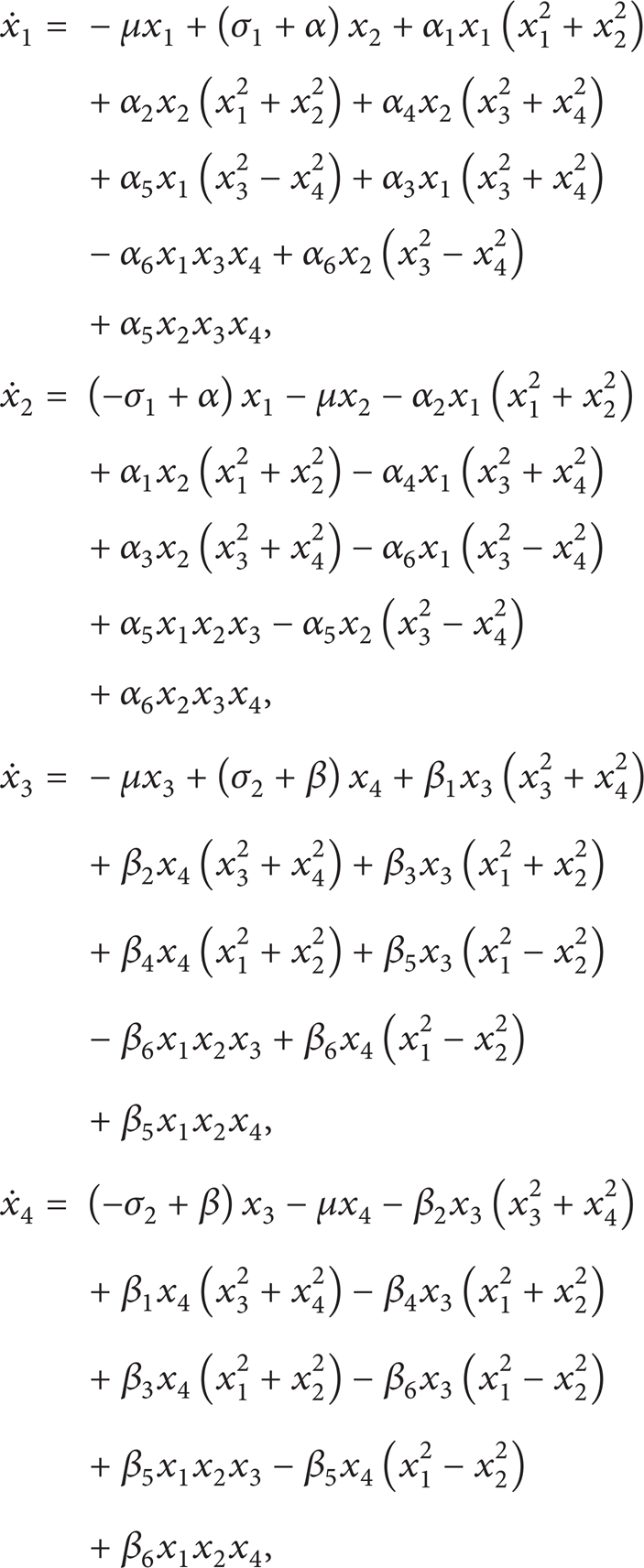
where α i , β i are the combined coefficients.
We transform the system (3) by applying a nonsingular linear transformation.
Let

Note the following linear transformation (TF) as

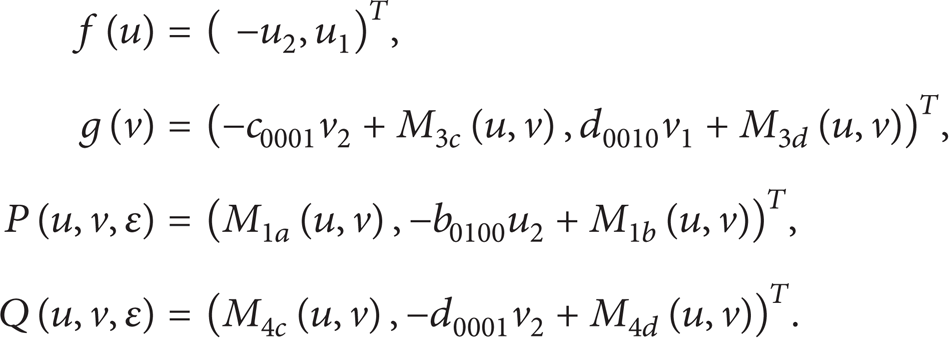
Then, by using the transformation (TF), system (3) has the form

where the expression of M ji (u1,u2,v1,v2), j = 1, 2, 3, 4, i = a,b,c,d, is shown in Appendix B, and the coefficients are shown in Appendix A.
The systems are topologically equivalent after the nonsingular linear transformation, so we can study the existence of periodic solution of system (3) through studying it of system ((6a) and (6b)).
3. Bifurcation of Periodic Solution
In this section, we investigate the existence and stability of periodic solution of system ((6a) and (6b)).
3.1. Lemmas
In this part, we use the method in [14] to study the bifurcation of periodic solution of certain 4-dimensional system.
Consider the following C r (r≥3) 4-dimensional system:

Suppose that the following conditions hold.
(A) The planar autonomous system

is a Hamiltonian system with Cr + 1 Hamiltonian H(x), and there exists an open interval J⊂R, such that system (8) has a family of periodic orbits
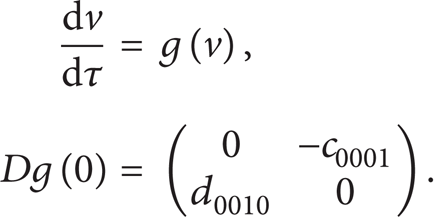
(B) y = 0 is a focus of planar autonomous system

Without loss of generality, we assume that

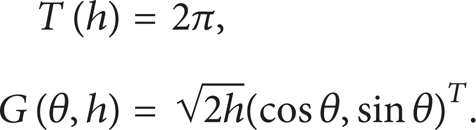
Assume that L h has a parameter representation x = q(t,h), 0 ≤ t ≤ T(n), where T(h) denotes the period of L h for h∈J. Let

where (a1,a2) T ∧(b1,b2) T = a1b2-a2b1, and we have the following.
Lemma 1. Suppose that
If M(r)≠0 for any r∈J, the system ((7a) and (7b)) has no periodic orbits with period near T(r) in a neighborhood of
If there exists h0∈J, such that M(h0) = 0, M′(h0)≠0, and ωT(h0)≠2kπ, then system ((7a) and (7b)) has a unique periodic orbit with period near T(h0) in a neighborhood of
Let

Lemma 2. If there exists h0∈J, such that M(h0) = 0, M′(h0)≠0, T′(h0) = 0, and
if 2d2ε<d1ε<0, the periodic orbit Lε of system ((7a) and (7b)) is asymptotically stable, and there is a nontrivial invariant torus S2ε of system ((7a) and (7b)), which is unstable;
if d2ε<0<d1ε, the periodic orbit Lε of system ((7a) and (7b)) is unstable, and there is a nontrivial invariant torus S2ε of system ((7a) and (7b)), which is stable;
if d1d2≠0, d1ε<2d2ε, or 0<2d2ε<d1ε, the periodic orbit Lε of system ((7a) and (7b)) is unstable, and there is a nontrivial invariant torus S2ε of system ((7a) and (7b)), which is also unstable.
3.2. Dynamic Analysis of the System
In this section, we investigate the existence and stability of periodic solutions of system ((6a) and (6b)) through studying the bifurcation of periodic solutions of system ((18a) and (18b)). In system ((6a) and (6b)), let

and note that
For simplicity, we use the following transformation:

when

or

Then system ((6a) and (6b)) can be rewritten as follows:


The perturbed system ((18a) and (18b)) satisfies the following two qualities.
(A) The planar autonomous system

is a Hamiltonian system with the Hamiltonian H(u) = u12 + u22, and there exists an open interval J⊂R, such that system ((18a) and (18b)) has a family of periodic orbits

(B) When β1≠0, v = 0 is a 1-order weak focus of planar autonomous system
Since
In system ((18a) and (18b)), by direct computation, we have
By Lemma 1, we have that the sufficient condition for the existence of periodic solutions of the perturbed system ((18a) and (18b)) in a neighborhood of

is that
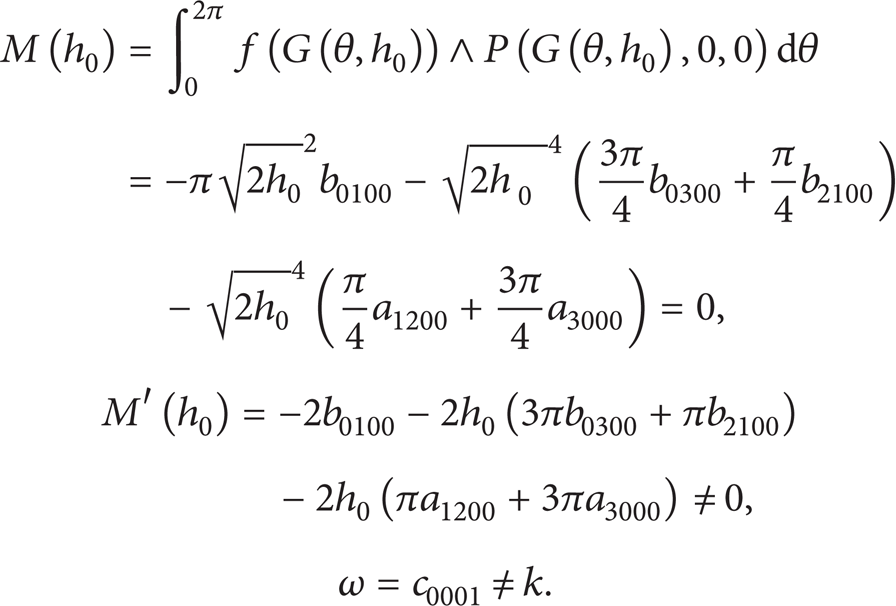
Solving the equation M(h0) = 0, we have

that is, in system ((18a) and (18b)), when

system ((7a) and (7b)) has a unique periodic orbit with period near T(h0) in a neighborhood of

This periodic orbit is bifurcated from the periodic orbit of the unperturbed system.
where

By Lemma 2, when ω = c0001 is an irrational number, the stability of the periodic orbit Lε in the neighborhood and the nontrivial invariant torus S2ε is showed in Table 1.

4. Numerical Simulation
In this section, we present one group of phase diagrams of the unperturbed system and four groups of phase diagrams of the perturbed system of different parameters to verify the results and compare relative parameters to find out which relative parameter influences the existence or stability of the periodic solution.
For simplicity, we note

(1) When ε = 0, there is a family of closed orbits of system ((18a) and (18b)) on the plane v1 = 0, v2 = 0. In other words, there is a family of closed orbits of system (3) on the plane x3 = 0, x4 = 0. Refer to Figure 1.
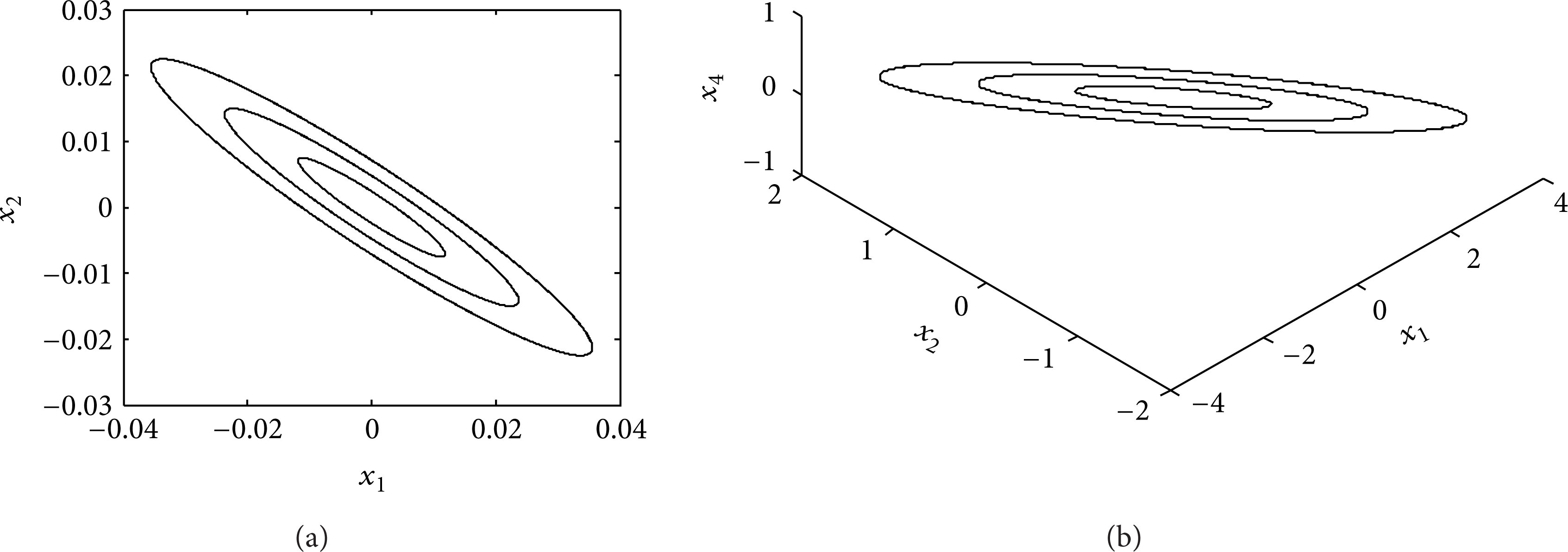
Periodic solutions of the unperturbed system.
(2) When ε≠0, the group of parameters of UPE is equal to UPE1, where

By computation, there does not exist h0, such that M(h0) = 0. Hence, there is no periodic orbit of system ((6a) and (6b)) under this group of parameters. Refer to Figure 2.

Orbit of the unperturbed system under parameter conditions UPE1.
(3) When ε≠0, the group of parameters of UPE is equal to UPE2 and UPS is equal to UPS1, where
By computation, there exists h1, such that M(h1) = 0, M′(h1)≠0, and d1, d2 satisfy the condition of number 1 in Table 1, so there exists a periodic solution with period near 2π in a neighborhood of L h 1 . The solution is asymptotically stable, and the nontrivial invariant torus is unstable. Refer to Figure 3.

Periodic orbit of the unperturbed system under parameter conditions UPE2 and UPS1.
(4) When ε≠0, the group of parameters of UPE is equal to UPE2, and UPS is equal to UPS2, where

By computation, there exists h1, such that M(h1) = 0, M′(h1)≠0, and d1, d2 satisfy the condition of number 2 in Table 1, so there exists a periodic solution with period near 2π in a neighborhood of L h 1 . The solution is unstable, and the nontrivial invariant torus is stable. Refer to Figure 4.

Periodic orbit of the unperturbed system under parameter conditions UPE2 and UPS2.
(5) When ε≠0, the group of parameters of UPE is equal to UPE2, and UPS is equal to UPS3, where

By computation, there exists h1, such that M(h1) = 0, M′(h1)≠0, and d1, d2 satisfy the condition of number 3 in Table 1, so there exists a periodic solution with period near 2π in a neighborhood of L h 1 . The solution is unstable, and the nontrivial invariant torus is unstable. Refer to Figure 5.

Periodic orbit of the unperturbed system under parameter conditions UPE2 and UPS3.
In this section, we divide the parameters into two groups, noted UPE and UPS. When the group UPE is equal to UPE1, there is no periodic solution of system ((18a) and (18b)). When the group UPE is equal to UPE2, each system, with the different parameters of UPS, has a unique periodic solution which bifurcated from the same periodic orbit h1. When the group UPE is equal to UPE2, and the group UPS is equal to UPS1, UPS2, and UPS3, respectively, the stability of the periodic solution and the nontrivial invariant torus are different from each other. From above, we get that the group of UPE decides the existence and its relative location, and the group of UPS decides the stability of the periodic solution and the nontrivial invariant torus.
5. Conclusion
In this paper, we apply the bifurcation theory to research the existence and stability of the periodic solution of the viscoelastic belt system. At first, we transformed the average equations. Then according to Melnikov function, we can get existence conditions and relative location of periodic solution of the perturbed system and judge the periodic solution and the stability of nontrivial invariant torus. Finally by analyzing and comparing the relationship between parameters and the periodic solutions, we can come to the conclusion that the group of UPE influences existence and relative location of periodic solution, and the group of UPS affects the stability of the periodic solution and the nontrivial invariant torus. The results play a significant role in studying the periodic solution of the viscoelastic belt system.
Footnotes
Appendices
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors gratefully acknowledge the support of the National Natural Science Foundation of China through Grant nos. 11072007, 11372014, and 11290152 and Beijing Natural Science Foundation through Grant no. 1122001.