
Abstract
The dynamics of pneumatic systems are highly nonlinear, and there normally exists a large extent of model uncertainties; the precision motion trajectory tracking control of pneumatic cylinders is still a challenge. In this paper, two typical nonlinear controllers—adaptive controller and deterministic robust controller—are constructed firstly. Considering that they have both benefits and limitations, an adaptive robust controller (ARC) is further proposed. The ARC is a combination of the first two controllers; it employs online recursive least squares estimation (RLSE) to reduce the extent of parametric uncertainties, and utilizes the robust control method to attenuate the effects of parameter estimation errors, unmodeled dynamics, and disturbances. In order to solve the conflicts between the robust control design and the parameter adaption law design, the projection mapping is used to condition the RLSE algorithm so that the parameter estimates are kept within a known bounded convex set. Theoretically, ARC possesses the advantages of the adaptive control and the deterministic robust control, and thus an even better tracking performance can be expected. Extensive comparative experimental results are presented to illustrate the achievable performance of the three proposed controllers and their performance robustness to the parameter variations and sudden disturbance.
1. Introduction
Pneumatic cylinders are clean, easy to work with, and low cost; in addition, they have a high power-to-weight ratio and an excellent heat dissipation performance. These properties make them favorable for servo applications. However, pneumatic systems also have a number of characteristics which post significant challenges for the precision motion trajectory tracking control. Due to the compressibility of air, nonlinear flow through pneumatic system components, and significant friction of the cylinder seals as well as the payloads, the dynamics of pneumatic systems are highly nonlinear. Furthermore, there normally exist rather severe parametric uncertainties and uncertain nonlinearities in the modeling of pneumatic systems. Parametric uncertainties arise due to the variations in the physical parameters (e.g., seal friction). Uncertain nonlinearities are caused by terms like unmodeled dynamics, simplified flow characteristics of the control valve, and unknown external disturbances.
Significant effort has been devoted to solving the difficulties in controlling pneumatic cylinders. Early works include PID gain scheduling techniques [1, 2], linear controllers augmented with friction compensation using neural network or nonlinear observer [3, 4], and nonlinear state feedback techniques [5, 6]. Nevertheless, they obtained only a limited improvement in performance than the fixed-gain linear controllers [7]. Later on, adaptive control and deterministic robust control were considered. Let us mention, for instance, model reference adaptive control [8], self-tuning control [9], and sliding mode control [10–15]. Generally, they can attenuate the effects of model uncertainties and had delivered a much better performance than other control strategies [16].
Recently, the backstepping technique was employed to design nonlinear controllers for further improving the tracking performance of pneumatic cylinders [17–19]. In [17], a nonlinear controller using backstepping design technique for the pneumatic system was suggested, and the maximum tracking error of a smooth step trajectory was about 1.27 mm. A similar nonlinear control law was designed in [18] using backstepping technique, and experiments were conducted with small size cylinders (9.5 mm bore and 6.4 mm bore). The maximum tracking errors were within ± 0.5 mm when a sinusoidal trajectory with amplitude of 7.5 mm and frequency of 1 Hz was tracked. In [19], a model of the pneumatic system using offline trained neural network was presented, and based on which a novel control architecture with three components (sliding mode control based motion controller, force division block, and nonlinear state feedback force controller) was proposed. Sinusoidal trajectory with amplitude of 0.16 m and a progressively increasing frequency (up to 0.5 Hz) was used to test the tracking performance. The maximum tracking error was around 6 mm. However, since only strong nonlinear robust feedback is utilized to overpower the model uncertainty effects, the above backstepping nonlinear controllers are subjected to quite severe control input chattering.
As reviewed above, the nonlinear control schemes, which can account for model uncertainties, are essential for controlling precisely the motion of the pneumatic cylinders. As a simple approach to deal with model uncertainties, the sliding mode control has been widely used in [10–19]. It is noted that, since no attempt is made to learn from past behavior, the designs are conservative and always involve either switching or high gain feedback to achieve good tracking accuracy. Hence, in order to attain high performance, a certain advanced control strategy which integrates adaptive control with robust control has to be employed. The adaptive robust control (ARC) proposed in [20, 21] utilizes online parameter adaptation to reduce the extent of parametric uncertainties and employs sliding mode control to attenuate the effects of model uncertainties. In ARC, a projection-type parameter estimation algorithm is used to solve the design conflict between adaptive control and robust control, and the backstepping technique is adopted to design the controller. The effectiveness of the approach has been verified through various application studies, for example, electrohydraulic actuator driven large-scale mechanical systems [22], linear motor driven positioning stages [23], and the control of pneumatic muscles driven parallel manipulators [24].
In this paper, a pneumatic cylinder controlled by a proportional directional control valve is considered, which is depicted in Figure 1. The adaptive robust control strategy is applied to design a high performance motion controller for the system. In particular, we present an experimental comparison of the proposed ARC controller and other two nonlinear control algorithms recently popular in the literature: adaptive backstepping control and deterministic robust control. The adaptive backstepping controller is developed using the tuning function design [25], and the deterministic robust controller is constructed using the backstepping design. Three controllers are compared with respect to performance, performance robustness to parameter variations and external disturbance, and control effort. The rest of this paper is organized as follows. Section 2 gives the dynamic models. Section 3 presents the three strategies to be studied. Experimental results are given in Section 4, and conclusions are drawn in Section 5.

Schematic diagram of a pneumatic cylinder controlled by a proportional control valve.
2. Dynamic Models and Problem Formulation
The pneumatic system shown in Figure 1 consists of a cylinder (FESTO DGC-25-500-G-PPV-A) controlled by a proportional directional control valve (FESTO MPYE-5-1/8-HF-010B). The system modeling presented in this paper is based on our previous work [26].
The movement of the piston-load assembly can be described by

where x is the piston position, m is the lumped mass including piston, slider, and external load, p
a
and p
b
are the absolute pressures of the cylinder chamber A and chamber B, respectively, A is the piston effective area, b is the viscous friction coefficient, F
L
is the external load force,

The following simplified model will be adopted to describe the cylinder thermodynamics:

where i = a,b is the cylinder chambers index, T
i
is gas temperature inside the chamber, T
s
is the ambient temperature, pbal is the equilibrium pressure when the spool of the control valve is at the central position, ps is the supply pressure, n is the polytropic index with a value of 1.35, γ is ratio of specific heats,
Choosing the origin of piston displacement at the middle of the stroke, the volume of each chamber can be expressed as

where V0a and V0b are the dead volumes of the two chambers at the end of stroke, including fittings and lines, and L is the piston stroke.
Convection is assumed as mode of the energy transfer between the air in the chamber and the barrel. Because of the low heat capacity of the air and the high heat capacity of the surrounding material of the barrel, the temperature of the metallic parts can be regarded the same as ambient temperature. Therefore,

where h is the heat transfer coefficient and S hi (x) is the heat transfer surface area. The heat transfer coefficient h can be identified experimentally using the method proposed in [26]. Figure 2 shows the measured heat transfer coefficient for the cylinder DGC-25-500-G-PPV-A. Heat transfer in pneumatic cylinders is a complex phenomenon. The values of heat transfer coefficient vary significantly during charging or discharging process. But, in practice, it would be enough to set a constant value to the coefficient [27]. A value of 60 W/(m2·K) for charging process and a value of 30 W/(m2·K) for discharging process will be chosen as a first step. The heat transfer surface area S hi (x) can be calculated by
where D is the diameter of piston.
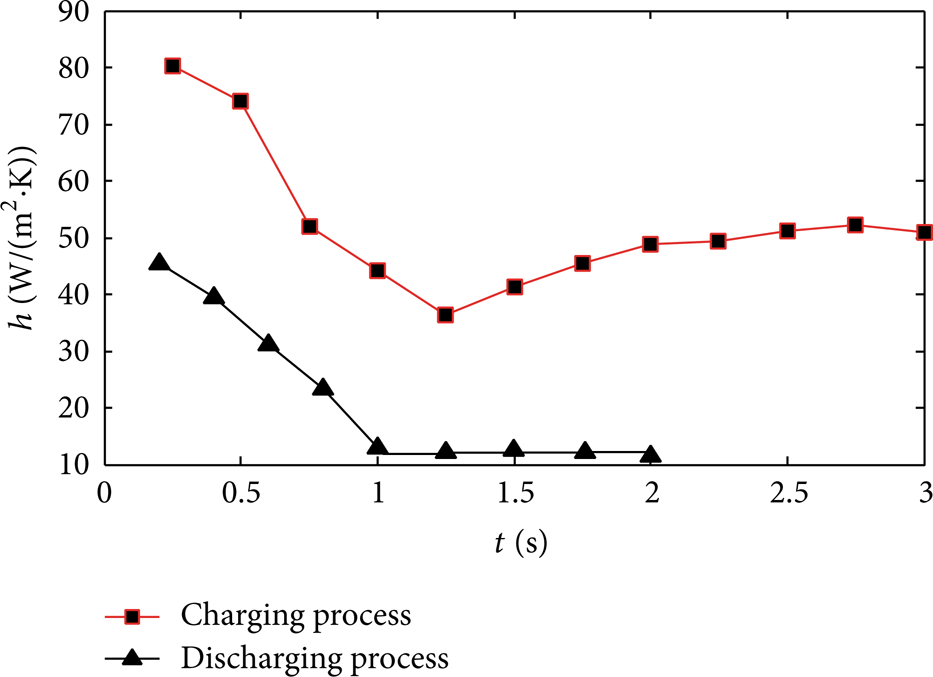
Measured values of heat transfer coefficient.
Neglecting the valve dynamics, a combination of the International Standards Organization (ISO) recommended model and the theoretical model of compressible flow through an orifice is used to describe the flow through the valve MPYE-5-1/8-HF-010B; consider the following:

where

To reduce the complexity of the model, the critical pressure ratio pr is assumed to take a constant value of 0.29 according to the valve catalogue. Since it has been confirmed experimentally that the valve is approximately symmetrical but unmatched, through measuring the mass flow rate under different input signals and work port pressures, the relation between input signal u and orifice area (input and exhaust paths) could be obtained as shown in Figure 3. Note that the valve null voltage is not 5 V as expected. The discharge coefficient C d is introduced to account for flow reduction caused by contraction and losses. It depends on the pressure ratio and is identified experimentally as follows:


Input and exhaust path valve areas versus input signal.
Generally, the system is subjected to parametric uncertainties due to the variation of b, A
f
, F
L
, h, and so forth and uncertain nonlinearities represented by

where
Assumption 1. The extent of parametric uncertainties and uncertain nonlinearities are known; that is,

where
For simplicity, the following notations are used throughout the paper: •
i
is used for the ith component of the vector •, the operation ≤ for two vectors is performed in terms of the corresponding elements of the vectors,
The control objective is to synthesize a control input u for system (10) such that x1 tracks the desired trajectory x1d with a guaranteed transient and final tracking accuracy. The desired trajectory x1d is assumed to be known, bounded with bounded derivatives up to the second order. Since the model uncertainties are unmatched in system (10), the recursive backstepping design technique will be employed. Two popular nonlinear control tools, robust backstepping control and tuning function based adaptive backstepping control, will be applied first, from which one can gain insights into the development and the advantages of the adaptive robust control.
3. Controller Design
3.1. Tuning Function Based Adaptive Backstepping Control
Step 1. Assuming that the system has parametric uncertainties only,

where k1 is a positive feedback gain. Since the transfer function from e2 to e1, that is,

Let p L = x3-x4 denote the scaled pressure difference between two chambers. Considering p L as the virtual control input, the adaptive control law p Ld for p L is then given by

where p
Lda
is the model compensation term with online parameter estimates
Define a positive semidefinite function

where

where
Step 2. Differentiating e3 and substituting the last two equations of (10) into it yields
Consider q L as the virtual control input. Therefore, next is to synthesize a control function q Ld for q L such that the (e2,e3) system ((13) and (17)) is stable with respect to

Similar to (14), the following virtual control function q Ld is proposed:
where ν is a correction term yet to be chosen. Since the effects of inexact mass flow rate model equation (7) were lumped into modeling errors represented by

where

To eliminate
Finally, the resulting

Therefore, all signals in the system are bounded and the tracking error asymptotically converges to zero.
Step 3. Once the q Ld is calculated according to (19), the input signal u for the proportional directional control valve could be obtained according to (7) and the relation between the input signal and effective valve orifice area (see Figure 3).
3.2. Deterministic Robust Control
Deterministic robust control utilizes nonlinear feedback to overpower both types of model uncertainty effects; its design parallels the adaptive backstepping design in the above subsection.
Step 1. When the uncertain nonlinearities exist, rewrite the derivative of e2 as

The robust control law p Ld for p L is given by

where p
Lda
has the same form as that in (14) except that
Differentiating V2 and substituting (24) and (25) into it yields

where

where θ Mi = θ imax – θ imin , i = 1, 2, 3. Using the smoothed sliding mode control technology, the robust control function pLds2 can be chosen as

where η2>0 is a design parameter and can be considered as the boundary layer thickness. Thus, the following conditions are satisfied:

Substituting (30) into (27) leads to

Step 2. As seen from (31), if e3 = 0, then e2 will exponentially converge to the ball whose size can be made arbitrarily small by increasing feedback gain k2 and/or decreasing controller parameter η2. Therefore, next is to synthesize a virtual control function such that e3 converges to zero or a small value with a guaranteed transient performance. In the presence of uncertain nonlinearities

where
Consider q L as the virtual control input. Similar to (25), the following robust control function q Ld is proposed:

Define a positive semidefinite function

Differentiating V3 and substituting (27), (32), and (33) into it gives

As in Step 1, qLds2 is chosen as

Therefore, the following condition is satisfied:

Substituting (37) into (35) and noting (31) leads to

where

Hence, e2 and e3 will exponentially converge to some balls whose sizes can be adjusted via parameters k2, k3, η2, and η3, and thus e1 is ultimately bounded.
Step 3. Once the q Ld is calculated according to (33) and (36), the input signal u for the proportional directional control valve could be obtained according to (7) and the relation between the input signal and effective valve orifice area (see Figure 3).
3.3. Adaptive Robust Control
The ARC law has a similar structure as the robust backstepping control law except that an online estimate of

where
The standard projection mapping is

where
The saturation function is defined as

where
It has been proven in [28] that for any adaption function

To achieve better convergence of parameter estimates, recursive least squares estimation algorithm with exponential forgetting factor and covariance resetting is applied to obtain the adaption function
where τ f , ω f , and ξ are filter parameters. Applying the filter to both sides of the last three equations of (10) and rewriting these equations, the following filtered line regression models can be constructed:

where x2f,

where

Therefore, for each set of regressors and corresponding unknown parameter vectors, the adaption rate matrix is given by

where α
i
≥0 is the forgetting factor, ν
i
≥0 is the normalizing factor with ν
i
= 0 leading to the unnormalized algorithm, ρ
M
is the preset upper bound for

The ARC and robust backstepping control laws share the same structure except that an online estimate of

Similar to (33), the following adaptive robust control function q Ld for q L is proposed:

Once the q Ld is calculated according to (51), the input signal u for the proportional directional control valve could be obtained according to (7) and the relation between the input signal and effective valve orifice area (see Figure 3).
Remark. The system has one-dimensional internal dynamics, which arises from the physical phenomenon that there are infinite number pairs of (p a , p b ) to produce the desired virtual control input p L . Rigorous theoretical proof of the stability of the internal dynamics is very hard and will be one of the focuses of our future work. Nevertheless, extensive experimental results obtained in this paper do prove that the two chamber pressures are bounded; that is, the internal dynamics is indeed stable.
4. Experimental Results
To test the proposed control strategy, an experimental setup has been built in our laboratory. The schematic of the experimental setup is shown in Figure 4. Figure 5 is the picture of the experimental setup. The cylinder (FESTO DGC-25-500-G-PPV-A) is controlled by a proportional directional control valve (FESTO MPYE-5-1/8-HF-010B). Pressure sensors (FESTO SDET-22T-D10-G14-I-M12) are used to measure the chamber pressures and the tank pressure. Position and velocity information of the cylinder movement is obtained by the magnetostrictive linear position sensor (MTS RPS0500MD601V810050). The control algorithms are implemented using a dSPACE DS1103 controller board, while an industrial computer is used as the user interface. The controller executes programs at a sampling period of 1 ms.

Schematic representation of the experimental setup.

Picture of the experimental setup.
The system physical parameters are m = 1.88 Kg, A = 4.908 × 10−4 m2, L = 0.5 m, V0a = 2.5 × 10−5 m3, V0b = 5 × 10−5 m3, R = 287 N·m/Kg·K, γ = 1.4, T
s
= 300 K, and p
s
= 7 × 105 Pa. The nominal values of the uncertain parameters are set as θ1 = 80 N·s/m, θ2 = 60 N, θ3 = 0 N, θ4 = 0 Pa/s, and θ5 = 0 Pa/s. The bounds of the parametric variations are chosen as
Tuning Function Based Adaptive Backstepping Controller. The control parameters are set as k1 = 50, k2 = 20, and k3 = 200. The adaption rates are set as
Robust Backstepping Controller. The offline parameter estimates are chosen as
ARC Controller. The same control gains as those in (C2) are used. The initial values of the adaption rate matrices are set as
The effectiveness of the proposed controllers has been demonstrated by a number of comparative experiments. Some typical results are given below. The following performance indices will be used to quantify each control algorithm. (1)
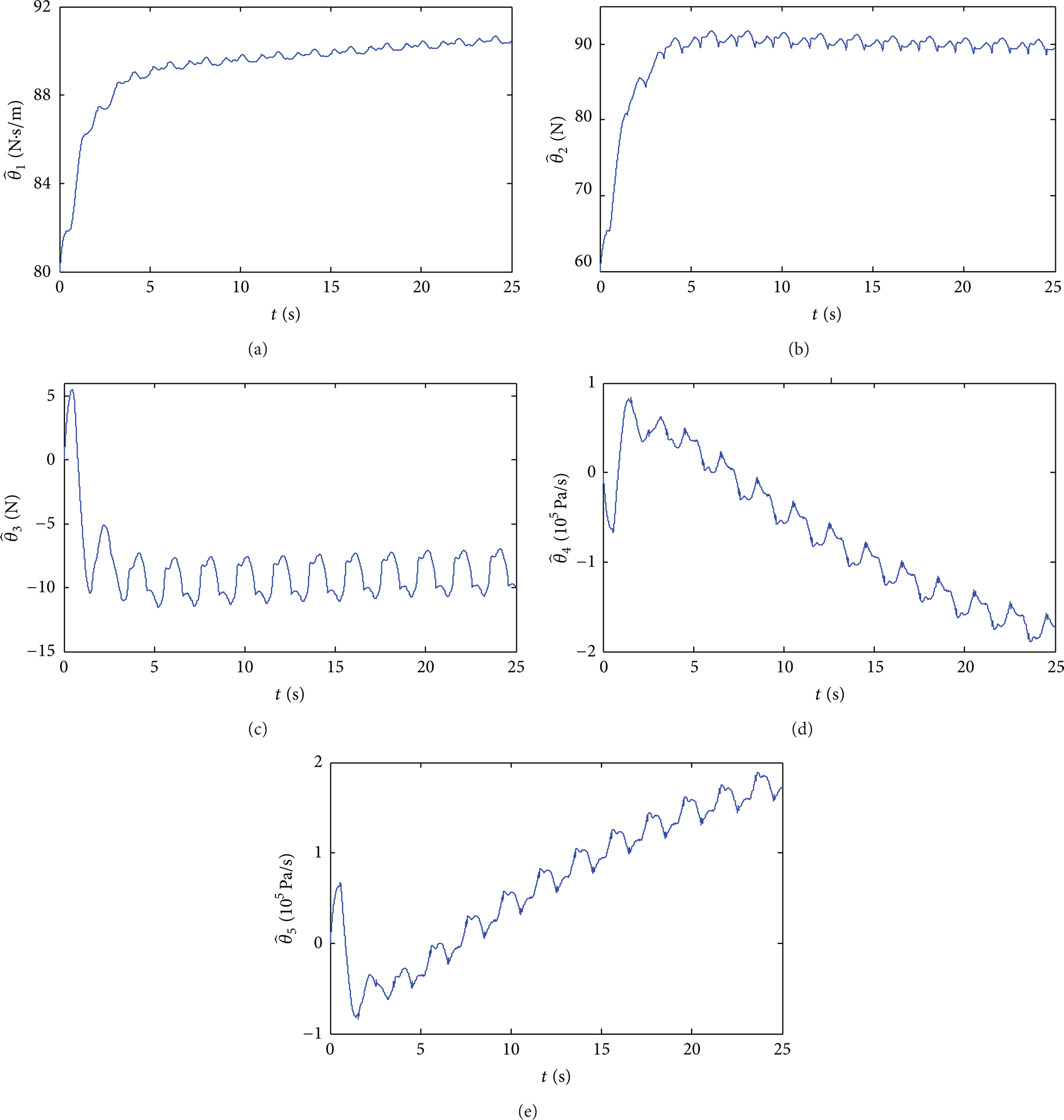
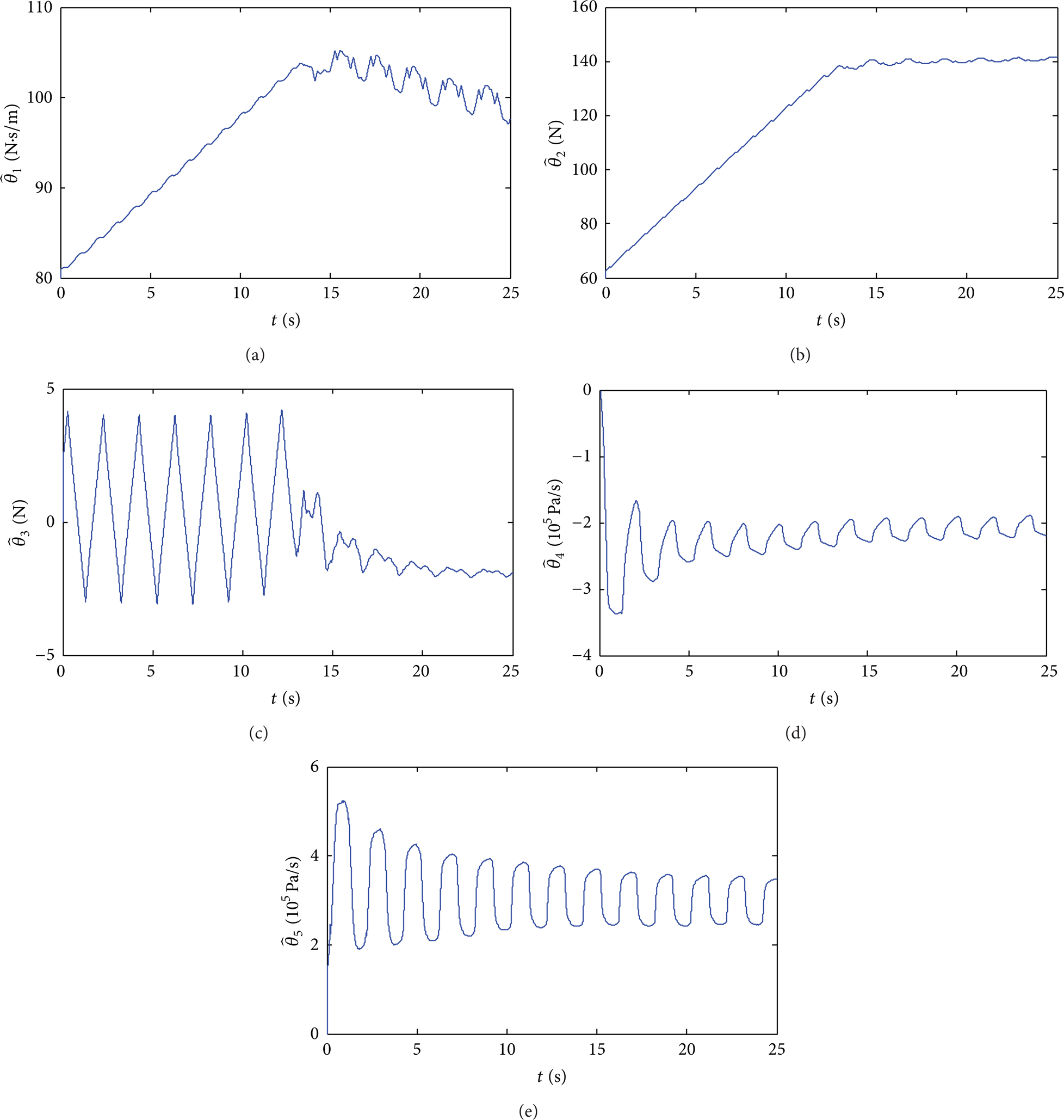
The controllers are first tested for tracking a sinusoidal trajectory with a frequency of 0.5 Hz and an amplitude of 0.125 m. The tracking errors are given in Figure 6. Table 1 shows the experimental results in terms of performance indices. Due to the use of parameter adaption as shown in Figures 7 and 8, (C1) and (C3) have much better steady-state tracking performance than (C2). In (C1), the adaption control law and parameter adaption law are synthesized simultaneously to meet the sole objective of reducing the output tracking error. The choice of parameter adaption law is limited to the gradient type with actual tracking errors as driving signals. Since the actual tracking error in implementation is normally small, the parameter estimates do not converge to their true values. In contrast, (C3) utilizes projection type RLSE algorithm, which realizes a complete separation of the control law design from the parameter adaption process, and more accurate parameter estimates are obtained. As a result, (C3) achieves an even better steady-state tracking performance than (C1). The final tracking error of (C3) is e1M = 2.9 mm, and the average tracking error of (C3) is
Experimental results in terms of performance indices.


Tracking errors for sinusoidal trajectory sinusoidal without load.
Parameter estimation of (C1) for trajectory motion without load.
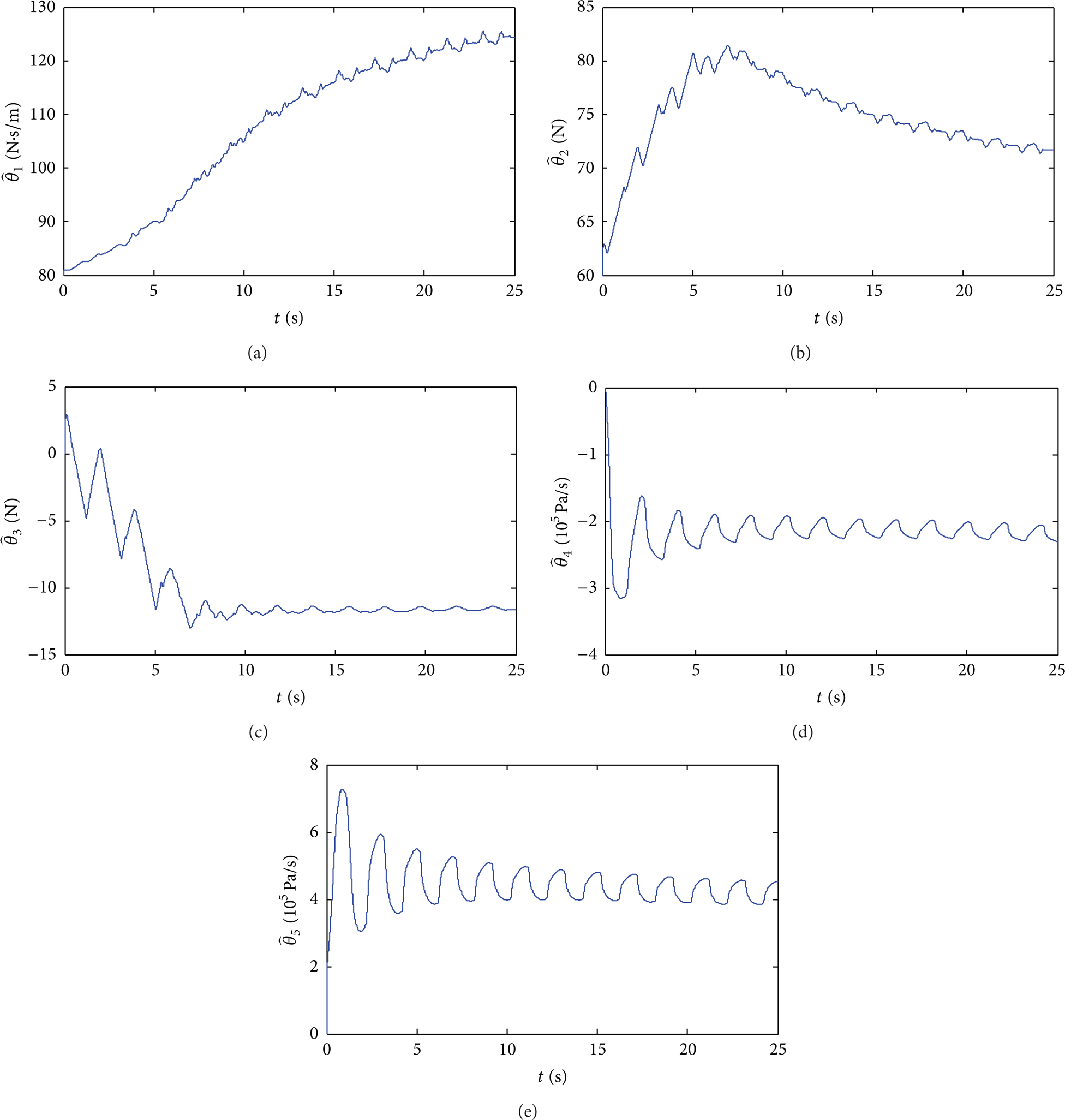
Parameter estimation of (C3) for sinusoidal trajectory motion without load.

Control inputs for sinusoidal trajectory without load.

Chamber pressures of (C3) for sinusoidal trajectory motion without load.
To test the performance robustness of the algorithms to the parameter variations, a 4.32 kg payload is mounted on the slide. The tracking errors are shown in Figure 11 and the experimental results in terms of performance indices are shown in Table 1. Figures 12 and 13 show the history of online parameter estimates of (C3) and (C1). Due to the change of payload, there exist large variations in the parameters. As seen, (C3) and (C1) perform much better than (C2). Although there are slightly large transient tracking errors, (C3) achieves almost the same steady-state tracking performance as before. This indicates that (C3) has high performance robustness to parameter variations. The control inputs of the three controllers shown in Figure 14 reveal that the control input will exhibit a larger degree of chattering due to the increase of payload.

Tracking errors for sinusoidal trajectory with load.
Parameter estimation of (C3) for sinusoidal trajectory motion with load.

Parameter estimation of (C1) for sinusoidal trajectory motion with load.

Control inputs for sinusoidal trajectory with load.
A large step signal is added to the output of the position sensor at t = 7.7's, which can be regarded as a sudden large disturbance to the system, and removed at t = 12.7's to test the performance robustness of the three controllers to the sudden disturbance. As seen in Figure 15, the added disturbance does not affect the tracking performance much except the transient spikes when the sudden changes of the disturbance occur. However, (C1) may suffer from parameter drifting and destabilize the system in the presence of big disturbance.

Tracking errors for sinusoidal trajectory with disturbance.
5. Conclusion
Due to the highly nonlinear behavior and rather severe uncertainties in the modeling of pneumatic systems, nonlinear control schemes, which can account for model uncertainties, are essential for controlling precisely the motion of the pneumatic cylinders. Three nonlinear controllers—adaptive controller, deterministic robust controller, and adaptive robust controller—are constructed and compared in this paper. The adaptive controller is developed using the tuning function design. Since the system model uncertainties are unmatched, the backstepping technology is applied to design the deterministic robust controller. The adaptive robust controller effectively integrates adaptive control with robust control through utilizing online recursive least squares estimation (RLSE) to reduce the extent of parametric uncertainties and employing the robust control method to attenuate the effects of parameter estimation errors, unmodeled dynamics, and disturbances. Comparative experimental results have been presented to illustrate the achievable performance of the proposed controllers. Generally, the adaptive robust controller and adaptive controller perform much better than the deterministic robust controller. Moreover, although the adaptive robust controller has a larger degree of control input chattering, it attains higher tracking performance and performance robustness to parameter variations and external disturbance than the adaptive controller.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This research is supported by the Fundamental Research Funds for the Central Universities (Grant no. 2014QNA40).