
Abstract
In vehicular ad hoc networks (VANETs) safety applications, vehicular position is fundamental information to achieve collision avoidance and fleet management. Now, position information is comprehensively provided by global positioning system (GPS). However, in the dense urban, due to multipath effect and signal occlusion, GPS-based positioning method potentially fails to provide accurate position information. For this reason, an assistant approach has been presented in this paper by using three-dimensional radio frequency, such as time of arrival (TOA) and direction of arrival (DOA). With the goal of providing an efficient and reliable estimation of vehicular position in general traffic scenarios, we propose a hybrid TOA/DOA positioning method based on Bayesian compressive sensing (BCS), which benefits from the realization of vehicle-to-roadside wireless interaction with the dedicated short range communication. The effectiveness of the proposed approach is proved through extensive experiments in several scenarios where different signal configurations and the noise conditions are taken into account. Moreover, some comparative experiments are also performed to confirm the strength of our proposed approach.
1. Introduction
The traffic safety and efficiency benefits can be achieved through the development and deployment of vehicular ad hoc networks (VANETs). The global navigation satellite system (GNSS), such as global positioning system (GPS), is a primary mean to provide position information for vehicular applications in vehicular ad hoc networks (VANETs) or telematics sensor systems. However, there are many challenges for vehicular positioning in most urban canyons of dense traffic flows such as wireless environmental complexity, multiple sensing signal interferences, and potentiality of GPS signal interruption. Additionally, the existing effect of multiple propagation paths in wireless sensing makes it difficult to locate the object with a high accuracy. Therefore, a single positioning technology based on GPS is not enough for some positioning applications in complex environments. For instance, vehicle safety applications in most real-life traffic scenarios always require relative high accurate vehicular position information, so as to achieve the objective of collision avoidance, lane changing assistance, danger warning, and so forth. Even differential GPS cannot provide the specific accuracy required by those vehicle safety applications due to serious multipath effects existing in realistic signal sensing environments [1]. For these reasons aforementioned, some innovative approaches combined with mobile communication technologies in vehicular networks have been developed to enhance positioning accuracy [2, 3].
Apart from the traditional GPS-based approaches, a lot of emerging positioning solutions are implemented based on spatial radio frequency (RF) [4, 5], which include those methods based on the measurement of the time of arrival (TOA) [6], time difference of arrival (TDOA) [7], direction of arrival (DOA) [8], and received signal strength (RSS) [9, 10] of radio signals transmitted between the mobile terminal (MT) and base stations (BSs). In the last decades, many approaches for spectral estimation have been used in DOA estimation [11] such as the multiple signal classification (MUSIC) [12], estimation of signal parameters via rotational invariance techniques (ESPRIT) [13], and the maximum likelihood estimation (MLE) [14]. But a main drawback of most of these methods is a high computation cost and poor precise estimation when there is no prior knowledge of the number of signals or they are applied in the specific situations with low signal-to-noise ratio (SNR) conditions [15]. Accordingly, these methods are not so practical, especially when being implemented in some small devices. Several computational efficiency approaches without an estimation of signal magnitude covariance matrix and its eigenvalues decomposition are presented in [8, 15]. Alternatively, for achieving a better performance, hybrid methods are proposed to use a combination of available range, range difference, and angle measurements for positioning [16–19].
A wide-area Wi-Fi-based positioning system for metropolitan has been presented in [20]. It adopts a RSSI-fingerprinting approach, which is based on a beacon map of radio sources in the specific environment. As the work of [20] shows, the device of wide-area Wi-Fi-based positioning system can localize itself with a rough median error of 13 m. Similarly, a global system for mobile communications (GSM) based approach in [21] is able to expand the sensing range, but it performs worse than that one in [20]. An effective method for measuring data metrics such as TOA and DOA in wireless channels of nonline-of-sight (NLOS) propagation has been presented in [22, 23]. The authors of [22, 23] have conducted some experiments to illustrate that their solution achieves the improvement of accuracy in positioning estimation. But these aforementioned methods are well suitable to be implemented in low mobility and stable environments rather than in general vehicular scenarios of high mobility. They have not been tested for instantaneous vehicular positioning so that they are not appropriate or potentially fail to support the vehicular safety applications relevant to VANETs. On the other hand, a system has been proposed to estimate the relative location between vehicles and the road-side units (RSUs), which uses the carrier frequency offset (CFO), a synthesis feature based on Doppler frequency shift (DFS) [3]. According to [3], it can give a good performance for positioning in high speed scenarios. However, as [3] has argued, the standard deviation (STD) of positioning error provided by the system increases when the speed of the vehicle decreases. It is because DFS is too difficult to be captured with a high degree of accuracy when the speed of the vehicle is too low. In addition, [24] proposes a dedicated short-range communications (DSRC) based positioning solution, in which a Markov localization algorithm is also presented to process low accurate GPS data. The authors of [24] have validated their presented approach through both simulations and actual experiments. However, although this approach in [24] can provide a good performance of vehicular positioning under some certain conditions, it requires all of the mobile nodes to be equipped with GPS and heavily depend on the performance of the relevant GPS hardwires. But it is not realistic to fully satisfy this requirement in real-life situations.
In this paper, we present a hybrid positioning solution to locate the vehicles. The real-time position of vehicles can be geometrically and dynamically calculated by using the comprehensive information on TOA and DOA. With the goal of dynamically positioning and meanwhile achieving good computation efficiency, we adopt the Bayesian compressive sensing algorithm (BCS) for estimating TOA and DOA. Additionally, we only need one-single RSU to process the received signals, and the vehicle does not have to exchange any data with the RSU or with other vehicles. Also, the GPS information of vehicles is not necessary in our work. The proposed BCS-based location method does not require any prior information on the number and the amplitude of the unknown incoming signals. Thanks to the good features of BCS (such as high accuracy, robustness to the noise, and low computational complexity), we utilize BCS-based method to estimate the combined information on TOA and DOA so as to enhance the performance of vehicular positioning. Furthermore, we have compared our proposed method with those traditional ones that have been widely used for position estimation, named as Root-MUSIC [25] and ESPRIT [13].
The rest of the paper is organized as follows. The preliminary is explained in Section 2. The DOA estimation problem is mathematically formulated in Section 3, and the multitask Bayesian compressive sensing- (MT-BCS-) based approach is described as well. A set of representative experiments is performed and the experimental results are analyzed and discussed in Section 4, where we also demonstrate the performance of our vehicular location method through some comparative simulations. Finally, some conclusions are drawn in Section 5.
2. Preliminary
Before going into detail on our proposed method, it is meaningful to formally make clear the vehicular location estimation problem. Usually, vehicular positioning is one of the most important applications for traffic systems, and accurate positioning information on a vehicle is essential for the support of vehicular safety applications. Ideally, a vehicle would get knowledge of its own position from GPS. However, those GPS devices with a good accuracy but high cost are not widely deployed onboard, so the related applications dependent on high-precision GPS-based positioning technologies are limited in actual urban canyons. On the other side, RSUs-assisted positioning technologies are some good alternatives in terms of achieving a better tradeoff between the cost of onboard devices and the demand of positioning on accuracy. As many existing literatures [3, 26] have argued, RSUs-assisted positioning technologies or hybrid positioning technologies are more promising to be implemented in some complex traffic environments, which is an inevitable trend in the development of wide-area vehicular sensor networks and mobile ad hoc networks in cities. RSUs deployed along the roads are usually called anchors, reference nodes, or base stations (BS). They can provide a priori information on their own position with a high precision and use self-position information to determine the relative position of a larger number of vehicles (also named as unlocalized mobile nodes) moving on the roads. Measurements between the multiple unlocalized nodes and the anchors could be any physical reading such as TOA, DOA, RSS, or the connectivity between those nodes (it is worth pointing out here that the connectivity represents the connection between any two nodes via wireless communication), which can be used to deduce those mobile nodes’ absolute or relative position. It should be noted that these aforementioned measurements could be attained via different modalities (e.g., Bluetooth [27], UWB [28, 29], Cellular [22, 30], and RFID [4, 31]). In this paper, we develop our positioning method based on the concept that vehicles are able to wirelessly communicate with roadsides via DSRC. That is, once the vehicle-to-roadside communication (V2R) is deployed, our proposal can be considered as the support for many vehicular positioning-related applications. Now, we would like to introduce some basic concepts so as to elaborate on our proposal in the following section.
2.1. DSRC
Recently, DSRC short for dedicated short-range communication has been widely adopted for wireless access in vehicular environment (WAVE). One of the most known technological standards belongs to IEEE, named as 802.11p standard. The Federal Communications Commission (FCC) has mandated a dedicated bandwidth of 75 MHz from 5.850 GHz to 5.925 GHz and seven channels as a freely licensed spectrum for DSRC [32]. It has been confirmed as the basic standard for many networked vehicular applications in the future in USA. More and more onboard unites (OBUs) and road-side units (RSUs) are equipped with DSRC to support reliable communication networks between vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) [2]. Thus, the deployment of V2V and V2I communications lays a solid radio foundation for the realization of vehicular positioning.
2.2. Hybrid TOA/DOA Estimation
TOA is a measurement of the propagation time of the signal traveling from a source to a receiver, which requires that the system clocks of all the involved BSs and TMs are precisely synchronized. Here, we treat a BS as a signal source and a MT as a receiver. Once the TOA between any one source and one receiver is obtained, the distance between these two nodes can be consequently determined by multiplying the TOA by the known propagation speed. In most practical applications, GPS is widely used to provide the TOA information, which is named as the GPS-TOA positioning technology. It is usually assumed that the positions of all the relevant BSs are known and the TOA information is noise-free. In addition, at least three BSs are needed in a GPS system and they are required to operate in a collaborative manner so as to achieve the triangulation in 2D case [19].
The DOA method originates from classical radio direction finding techniques [33]. Generally, an antenna array is needed for the estimation of DOA and a certain signal processing algorithm should be employed at the relevant BSs. Aiming at positioning a MT, two or more BSs are required to send the detection signals and receive the corresponding reflected signals via their antenna arrays so as to provide the DOA information related to this MT. The MT's position in two-dimensional (2D) plane is then estimated by determining the intersection of the signal paths. However, the DOA estimation is not so easy, because neither the number of signals simultaneously impinging on an antenna array nor their corresponding directions are known in advance. What is more, those received signals are always disturbed by noise. Therefore, sufficient antenna arrays are needed to improve the estimation accuracy. Usually, the number of antenna arrays in use should be larger than the number of received signals.
Both TOA and DOA estimation techniques require that the receivers should be able to accurately estimate the bearings or arrival times of the signals impinging on antenna array. The accuracy highly depends on the propagation conditions of the wireless channels. If the line-of-sight (LOS) path between BS and MT exists, high positioning accuracy can be achieved. However, this estimation will be heavily distorted by both additive environmental noises and multipath signals resulting from reflection or diffraction between the BSs and MT [33]. Therefore, a joint estimation based on both TOA and DOA has been developed to deal with the aforementioned problem. This joint estimation is known as hybrid TOA/DOA estimation, which can enhance the positioning precision [34]. The hybrid TOA/DOA estimation only needs a single BS and can offer many advantages over multiple-BS ones. Specially, it does not require time synchronization between MTs and BSs and does not require any additional information about the environment, so it can significantly reduce the additional network overhead [19, 33, 35]. The basic concept of the hybrid TOA/DOA estimation is given in Figure 1. By assuming that the MT is in LOS with the BS, the hybrid TOA/DOA estimation determines the MT position via a geometric relationship between this MT and the BS as illustrated in Figure 1 (in Figure 1, the parameter c denotes the signal speed, which is identical to the light speed; the parameter τ denotes the time lag when the wireless signal travels from the BS to the MT; and the parameter θ is used to represent the signal direction in the given X-O-Y coordination system.).

The hybrid TOA/DOA method.
2.3. Bayesian Compressive Sensing
The basic Bayesian compressive sensing (BCS) technique has been proposed based on the machine learning theory [36–38]. And it provides an efficient compressive sensing framework which employs Bayesian inference formalism for estimating underlying signals. Based on BCS, one needs not directly measure the information on all the dimensions of the signals of interest, but rather a smaller number of dimensions. Since BCS takes into account a certain additive noise in compressive sensing measurements and incorporates the ability of machine learning, it can provide a reliable estimation of the noise variance. Some BCS-based solutions for estimating the multidimensional data of interest have many appealing features such as the high computational efficiency, the accuracy, and the robustness to environmental noises. Additionally, BCS has been widely adopted in many other research fields such as medical image processing, microwave imaging, and signal array synthesis.
2.4. Problem Description
The problem to be solved is estimating the position of a vehicle when it passes a certain section of the road in dense urban where GPS signals are poor or not available. Figure 2 shows the situation our work mainly focuses on: one RSU is assumed to be equipped with an antenna array and deployed at the roadside. It can receive those signals that are periodically broadcasted from vehicular OBUs. Under this condition, we would like to estimate the vehicle position. Additionally, we assume that the position of the RSU is precisely known in advance, and we also set up a specific global coordination system whose x- and y-axes are, respectively, parallel and orthogonal to the road. Without loss of generality, we consider that the RSU and the OBU are at the same 2-dimensional plane, so that the propagation path of DSRC packets between RSU and OBU is always LOS in our concern.
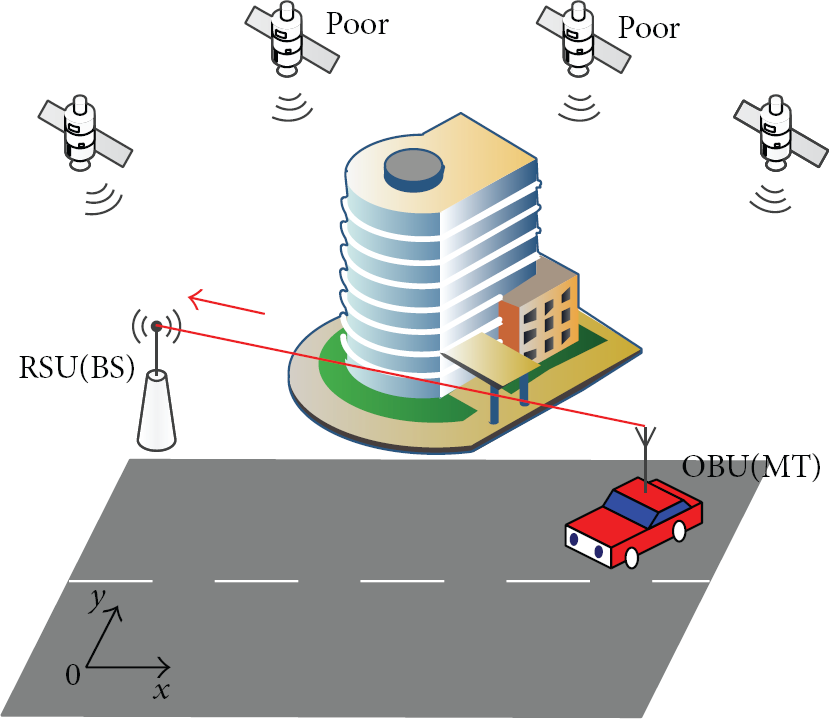
Problem definition and the initial idea for the solution.
3. Mathematical Formulation
3.1. Hybrid TOA/DOA Data Model
We assume that a set of K DSRC signals transmitted from the vehicle to the RSU is in line-of-sight (LOS), arriving from unknown bearings

where
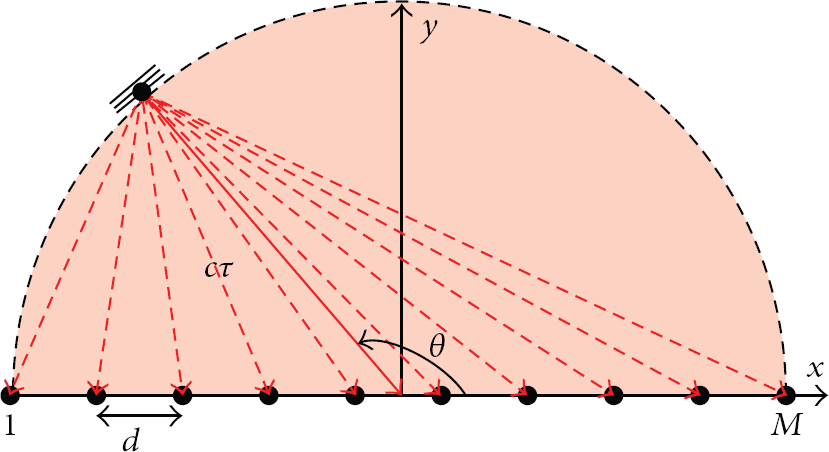
Impinging signals on uniform linear antenna array and the hybrid TOA/DOA positioning method.
3.2. Multitask Bayesian Compressive Sensing-Based DOA Estimation
The signals impinging on the antenna array are intrinsically sparse in the three-dimensional space. In order to apply the Bayesian compressive sensing (BCS) approach, the visible angular is discretized into
To deal with complex data using multitask Bayesian compressive sensing (MT-BCS) method, (1) is rewritten as follows:

where

where

where

where
where

4. Experiments
The objectives of this section are twofold. On the one hand, it provides guidelines for applying the MT-BCS method to location estimation based on hybrid TOA/DOA. On the other hand, it accesses the method's effectiveness in both improving location accuracy and robustness. As for the MT-BCS, the user-defined parameters
4.1. Hybrid TOA/DOA Location Procedure
In a time synchronized network, the TOA estimator
Indeed, in the DOA estimation procedure, thanks to the sparse feature, the estimated number
And the estimated DOAs,
Step 1. Set Step 2. If else stop; Step 3.
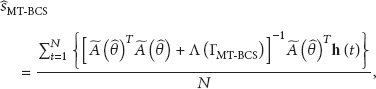
Afterwards, we define the actual targets position

4.2. Energy Threshold Analysis
In order to determine the optimal energy threshold
Parameters setting.

The minimum angular distance between DOAs of two adjacent incoming signals has been identified as

where

Angular scope discretization.
In MT-BCS-based estimation, the optimal threshold has been identified by the values

where


Get initial Listed the elements of
To draw more general outcomes on the behavior of the proposed method, further experiments have been carried out varying the element number of the array, M, the snapshot number, N, and the SNR. The values of
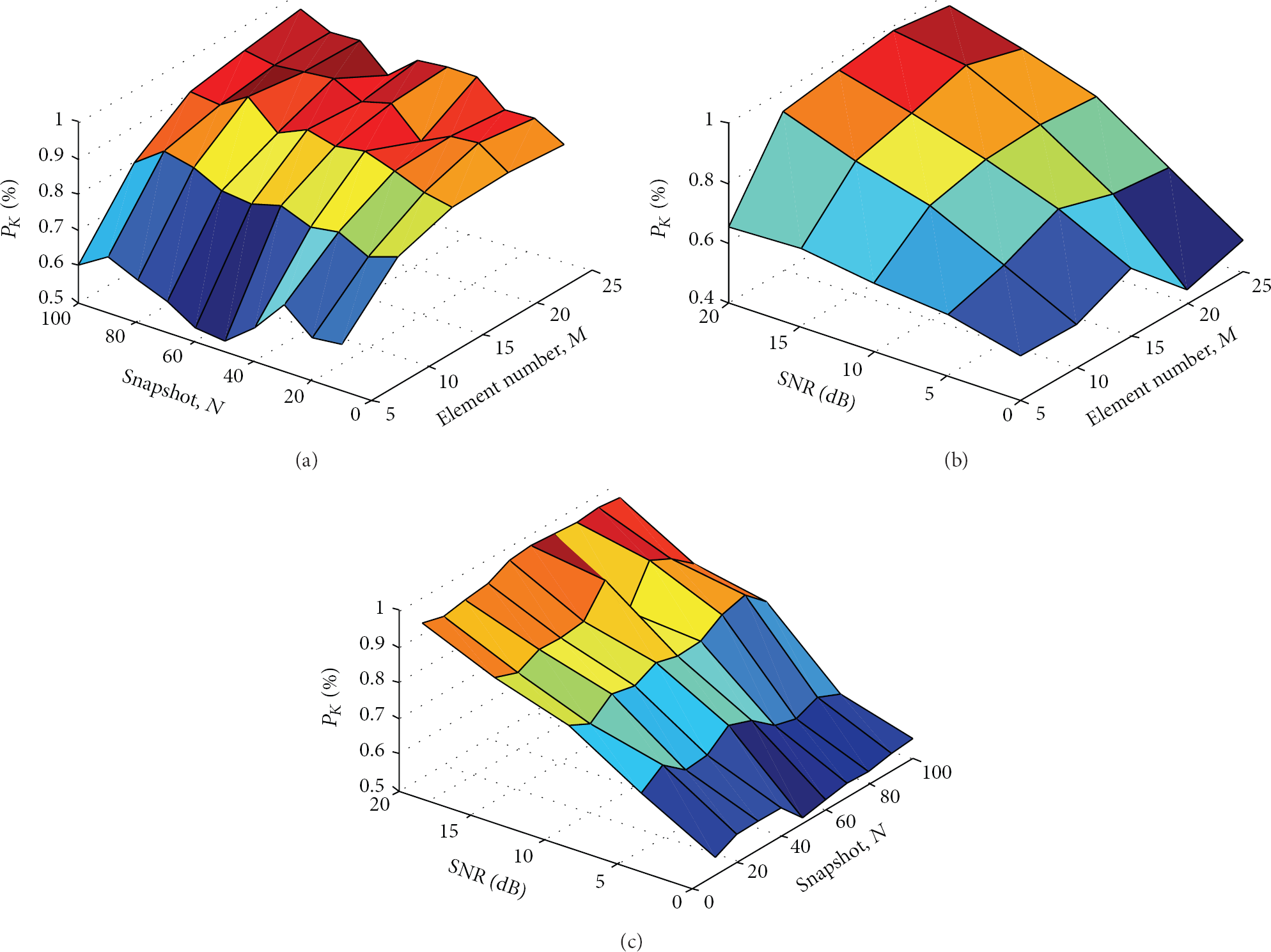
Plots of the number of the received signals (
4.3. Performance Analyzing
4.3.1. Hybrid TOA/DOA MT-BCS-Based Location Method
Hybrid TOA/DOA MT-BCS-based location method has been used in ten consecutive time instant (snapshots). Thanks to the high statistic correlation intermultiple snapshots [8], the bulk of added noise could be eliminated through multimeasurement on incoming signals. Figure 6 shows the MT-BCS-based DOAs estimation under the situation that each scenario does not have any prior knowledge of signal numbers K. The value of
DOA estimation based on MT-BCS and MSE values.


Actual and estimated DOAs when
As it is shown in Table 4, dealing with vehicles number


DOA estimation based on MT-BCS (


Actual and estimated DOAs when
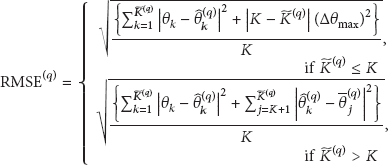
The root mean square error in each scenario,
The numerical analysis is concerned with a comparative assessment of MT-BCS and state-of-the-art approaches such as Root-MUSIC [25] and ESPRIT [13]. Figure 8 plots the

Multiple snapshots DOA estimation (
Hybrid vehicular location method has been tested in an urban intersection, wherein the street width is 40 m, and the RSU is located at the center
4.3.2. Cramer-Rao Bounds for Hybrid TOA/DOA-Based Location Estimation
By denoting the location estimator

Thus, its lower bound

where

υ denotes SNR (10). Apparently,

RMSE of hybrid TOA/DOA-based location estimation.
Obviously, the position estimation error is closely related to the vehicular position. The estimated RMSE worsens when the DOAs at RSU are close to 0 or π. When the vehicles are within the region close to

CDF of the location error (CRB for TOA/DOA one-single RSU).
4.3.3. Simulation for Real-Time Vehicular Positioning
We additionally simulate two cars moving along the vertical road shown in Figure 8 and use those three methods to estimate the cars’ real-time position. The speeds of both cars are fixed at 60 km/h and their travel distance is set to be 160 meters. Then we calculate the absolute position error (it is worth pointing out here that the absolute position error can be computed by using (16)) between the actual position data and the estimated outcomes obtained by our proposed method (marked as MT-BCS) and by the other two methods (marked as Root-MUSIC and ESPRIT). These results are illustrated in Figures 11(a) and 11(b). According to these results, it can be seen that the absolute position errors related to both cars stochastically fluctuate. It is because there exists a certain simulated noise in the estimation. In the simulation, we assume that the distances between the cars and the RSU are contaminated with the Gaussian white noise during the process of different estimations. The standard deviation of the simulated noise is set to be 10 meters. On the other hand, our proposed method can achieve a lower absolute position error for both cars on average when compared to the other two methods. These results strengthen the advantage of our proposed method.

The absolute position error related to the two simulated cars obtained by the compared methods.
5. Conclusions
In this paper, we propose a new vehicular location method based on hybrid TOA/DOA estimation. Beginning with a hybrid data model and a MT-BCS estimation method, this work analyzes the amplitudes of received signals in three-dimensional spaces at antenna array based on Bayesian compressive sensing algorithm, so as to estimate DOA information. By computing a simple geometrical relationship between the vehicles and the RSU, vehicular locations can be determined via combining both TOA and DOA estimators provided by the RSU. Cramer-Rao bound of vehicular location measurement has been analyzed, and the performance of the aforementioned position estimation method is illustrated through extensive experiments. The simulation results show several good features of the proposed method, which include (1) an accurate and reliable target detection rate and DOA estimation without any prior knowledge on the number of incoming signals in three-dimensional space, (2) a robust and accurate estimation on multisnapshots observation in different SNR conditions, and (3) low time complexity without computing the correlation matrix and its eigendecomposition. In addition, the comparative simulation also demonstrates that our proposed method outperforms the two traditional approaches Root-MUSIC and ESPRIT.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research is supported by the National Natural Science Foundation of China under Grants no. 61103098 and no. 91118008 and the Foundation of Key Laboratory of Road and Traffic Engineering of the Ministry of Education in Tongji University.