
Abstract
This paper discusses a node selection problem for bearings-only tracking in wireless sensor networks (WSNs). Saving energy and prolonging the lifetime of the network are the research focuses due to the severely constrained resource of WSNs. An energy-efficient network management strategy is necessary to achieve good tracking performance at low cost. In this paper, an energy-efficient node selection algorithm for bearings-only sensors in decentralized sensor networks is proposed. The residual energy of a node is incorporated into the objective function of node selection. A new criterion of node selection is also made to coordinate with the objective function. Compared with the other common methods, the proposed method can reduce the cost of the entire network, balance nodes energy expenditure, and extend the lifetime of network. Simulation results prove the effectiveness of the proposed method and show good performance in tracking accuracy and energy consumption.
1. Introduction
Target tracking has been widely applied in many fields of wireless sensor networks (WSNs), such as battle space surveillance, environment monitoring, and forewarning control. Because of the advantage of the concealment, passive technique becomes an important research direction of target tracking [1–4]. For passive target tracking in a wireless sensor network (WSN), the target state estimation of its position and velocity, which is the major task of target tracking, relies on the collaboration of sensor nodes. Due to extremely constrained resources especially the battery power of WSNs, it is necessary for an energy-efficient network management strategy to be implemented in the network. The main emphasis of network management is the study of the node selection problem (NSP). Therefore, this paper aims at designing an energy-efficient node selection approach to reduce the energy consumption of network, balance nodes energy expenditure, and extend the lifetime of network.
NSP has been attracting much attention of research and application in WSNs [5–25]. The simplest approach is the closest (CLT) node method mentioned in [5]. This method selects the closest nodes which have the shortest distance to the target to participate in tracking. It has simple calculations but low tracking precision as a result of the neglect of the angular diversity of nodes. In [6], the global node selection (GNS) method is proposed, which minimizes the expected filtered mean squared position errors using a metric like the geometrical dilution of precision (GDOP) [7, 8]. GNS uses all nodes locations every time interval for selecting the optimal M nodes, where M is a given value of active nodes number. In order to reduce more energy consumption, the autonomous node selection (ANS) method is proposed as a modification of GNS in [9]. ANS only needs to use local node information to achieve node selection. An uncertainty bounded model is introduced in [10], which considers an uncertainty area of the target as information utility. This method is good in precision but intensive in calculation. These methods both take the information utility brought by nodes as the objective function, but they do not consider the energy factor into the NSP. In [11], a node selection scheme is proposed within the framework of particle filter, which uses a node clustering method for collaborative tracking with considering the energy costs and the remaining energy. This scheme is efficient to achieve energy saving with a tolerable tracking error. However, the cluster head needs to consume extra energy because of selecting cluster members and controlling the tracking, and the node selection also neglects the angular diversity of nodes. In [12], a user selection scheme is presented to minimize the overhead energy consumed by cooperative spectrum sensing in a cognitive radio sensor network. This method can conserve energy and achieve reasonably acceptable spectrum sensing accuracy, but it only focuses on the sensor node with a cognitive radio. Zhao et al. [13] propose an information-driven sensor querying (IDSQ) and data routing approach, which employs a mixture of both information gain and cost as the objective function for node selection. This method introduces Mahalanobis distance as a measure of information utility and defines an entropy based information-theoretic measure. However, Mahalanobis distance can be only applied to the range sensors, and the entropy is difficult to compute in practice. Besides, an entropy-based sensor selection heuristic approach is presented in [14]. Although it shows good accuracy for target localization, this approach has high computational complexity. More details and algorithms about node selection can be found in [15–25].
This paper works at a distributed network consisting of bearings-only sensor nodes, that is, microphone sensors arrays, which give direction of arrival (DOA) estimations for tracking [26]. In the distributed system, there is no processing center for nodes to send their observations [27]. All information is also processed locally on nodes. The distributed network is considered in this paper for the following reasons. On one hand, the distributed system is insensitive to the changes of the network topology by nodes addition, remove, or failure. On the other hand, the transmission range is much shorter than the centralized network, thereby saving energy and cost. In this paper, we propose an energy-efficient node selection algorithm for bearings-only target tracking. The goal of our algorithm is to provide greatest improvement to tracking accuracy at the lowest cost and balance the energy consumption between nodes. Therefore, we redefine the information utility brought by nodes, incorporate the residual energy of nodes into NSP, and make a new criterion for node selection.
The rest of this paper is organized as follows. Section 2 introduces the system model, the decentralized extended Kalman filter (DEKF), and the foundation for node selection. In Section 3, the proposed method and other common methods (ANS, GNS, and CLT) are described in detail. The simulation results are given in Section 4. Finally, Section 5 concludes the paper.
2. Problem Formulation
The problem discussed in this paper is target tracking with bearings-only sensors in a WSN. The WSN is composed of nodes deployed randomly in a surveillance region. Each node includes an array of microphone sensors to achieve the DOA estimation of an acoustic target. To reduce energy consumption, the network needs to select a subset of nodes to observe the target and let other nodes sleep. Then the active nodes share their observations at every time interval, which we call a snapshot. In this paper, we make the following assumptions of the WSN. First, the network is fully connected, and the location of each node in coordinates is known. Second, all nodes are time synchronized. Third, the probabilities of detection and false alarm are one and zero, respectively. Finally, this paper only aims at one single target in 2D field.
2.1. Measurement Model
In order to better comprehend the tracking system, Figure 1 shows the measurement model of this system. At a given snapshot k, each active node can give a bearing with the DOA estimation for the target. Assume that the node measurement error obeys an additive white Gaussian noise model. Thus, for the active node j, the measurement


The measurement model of the tracking system.
According to the geometric relationship between the node location and the target position,
2.2. Decentralized Extended Kalman Filter
After the active nodes have estimated the DOA of the target, the tracking system fuses all measurements of the active nodes to utilize the extended Kalman filter (EKF) for tracking. The EKF can be viewed as the nonlinear counterpart of the classical Kalman filter [28]. Because the decentralized system is considered, this paper uses the decentralized extended Kalman filter (DEKF) to complete the trace process.
The target state is denoted by

Assume that there are M nodes participating in tracking at the snapshot k; then the measurements of all M nodes are denoted by

Like the Kalman filter, the DEKF also has two steps: the prediction step and the update step. The DEKF is carried out by the following equations.
(a) The prediction step:

(b) The update step:





2.3. Foundation for Node Selection
The goal of NSP is to find out the best set of active nodes from all nodes in the WSN to track the target. In order to ensure the tracking accuracy, the information utility is usually considered to be a measure of the expected mean square position error. That is, if NSP select the active nodes set which has the largest information utility, then target tracking will get the least expected mean square position error.
For example, the information utility of the active nodes set
According to the updated state covariance matrix in the DEKF,



3. Node Selection for Tracking
The aim of node selection is to select an active nodes subset
3.1. System Initialization
Once a target appears in the monitoring area, the nodes deployed in this area will detect the target and give a bearing estimation of the target position. Then the tracking system should decide which nodes will participate in tracking. The objective of choosing nodes is minimizing the mean square localization error. Therefore, we use the GDOP metric to be a method of system initialization.
Assume that there are
Therefore, the problem is to find the minimum of

The other method is “add one node at a time” (AOAT), where one node is chosen to be activated at a time. The details can be seen from [6]. It is minimizing the mean squared position error when adding a new node to

The system initialization process.
3.2. EENS
After system initialization, the active nodes in
3.2.1. The First Stage
The main task of this stage is to find the best active subset of
3.2.2. The Second Stage
The goal of EENS is to find out the active nodes set which can bring the largest information utility, save the cost of the network, and balance energy expenditure on each node. After the first stage, it is possible that an idle node can be better than a node in
First, the active node j in

The maximum of the information utility of these nodes is denoted as the threshold Γ for other nodes to join
Second, the idle nodes which receive information from all active nodes calculate their information utility

The information utility
However, the distance of the target motion is usually so small that the current active nodes are probably also best at the next snapshot. Therefore, some nodes are always selected in

The first term in
According to the quantity requirements for the nodes participants, we choose the nodes whose selected criterion

In addition, the number of active nodes

Now the set
The process of the EENS in a snapshot interval. (a) The active nodes set
Furthermore, the utility

The upper bound of the information utility brought by an idle node can help to eliminate the nodes which are unable to be better than the nodes in

The broadcast range of an active node needs to be set high enough to cover other active nodes in

3.3. ANS and GNS
The ANS algorithm uses different criteria to select idle nodes to join


Then these nodes in
Unlike ANS, although GNS incorporates the search stage of ANS, it uses all nodes within range of the
3.4. CLT
All nodes in the WSN know each node location after system initialization, so the active nodes can select idle nodes to become active at the next snapshot by the information of their close nodes. The CLT method simply selects the

Then this method sorts the virtual range so that it can choose the nodes. This method is computationally simple. However, its tracking accuracy is possible to be reduced due to the ignorance of the angular diversity of nodes.
4. Simulation
In order to demonstrate the effectiveness of the proposed method for node selection, we apply it to the WSN for bearings-only target tracking and compare it with CLT, GNS, and ANS in terms of the complexity, the execution time, the root mean square error (RMSE) of the target position estimation, energy consumption, and residual energy statistics on individual nodes.
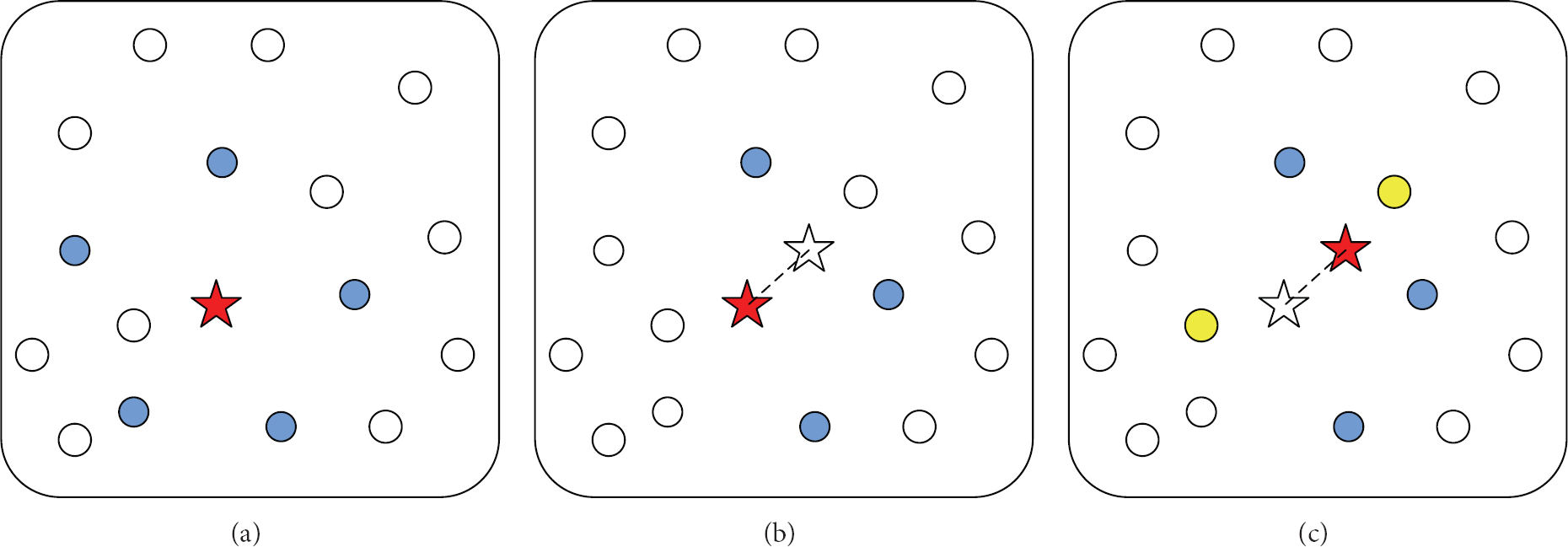
Consider a scene that 50 nodes are uniformly deployed over a monitoring area of 1000 * 1000 m2. The target occurs at
The target trajectory and nodes deployment.
Table 1 gives the computational complexity and the execution time of CLT, GNS, ANS, and EENS. The initial node selection at the beginning of target tracking uses the same method, as the system initialization in Section 3.1. Therefore, the comparison of the computational complexity focuses on the node selection at one time step. In other words, the total computations of node selection are calculated from the current snapshot to the next snapshot. The execution time is the average tracking time of 1000 Monte Carlo trials. The parameter setting is
The computational complexity and the execution time of CLT, GNS, ANS, and EENS.

Figure 5 has shown the tracking performance comparison of four different node selection methods versus the average number of active nodes per snapshot. The average RMSE for Monte Carlo simulations can be seen from different symbols. The RMSE of CLT is far larger than the other three methods and EENS performs better than other methods overall. In addition, EENS can use less active nodes but achieve almost the same tracking accuracy or better than the other methods.

Comparison of tracking accuracy against the average number of active nodes.
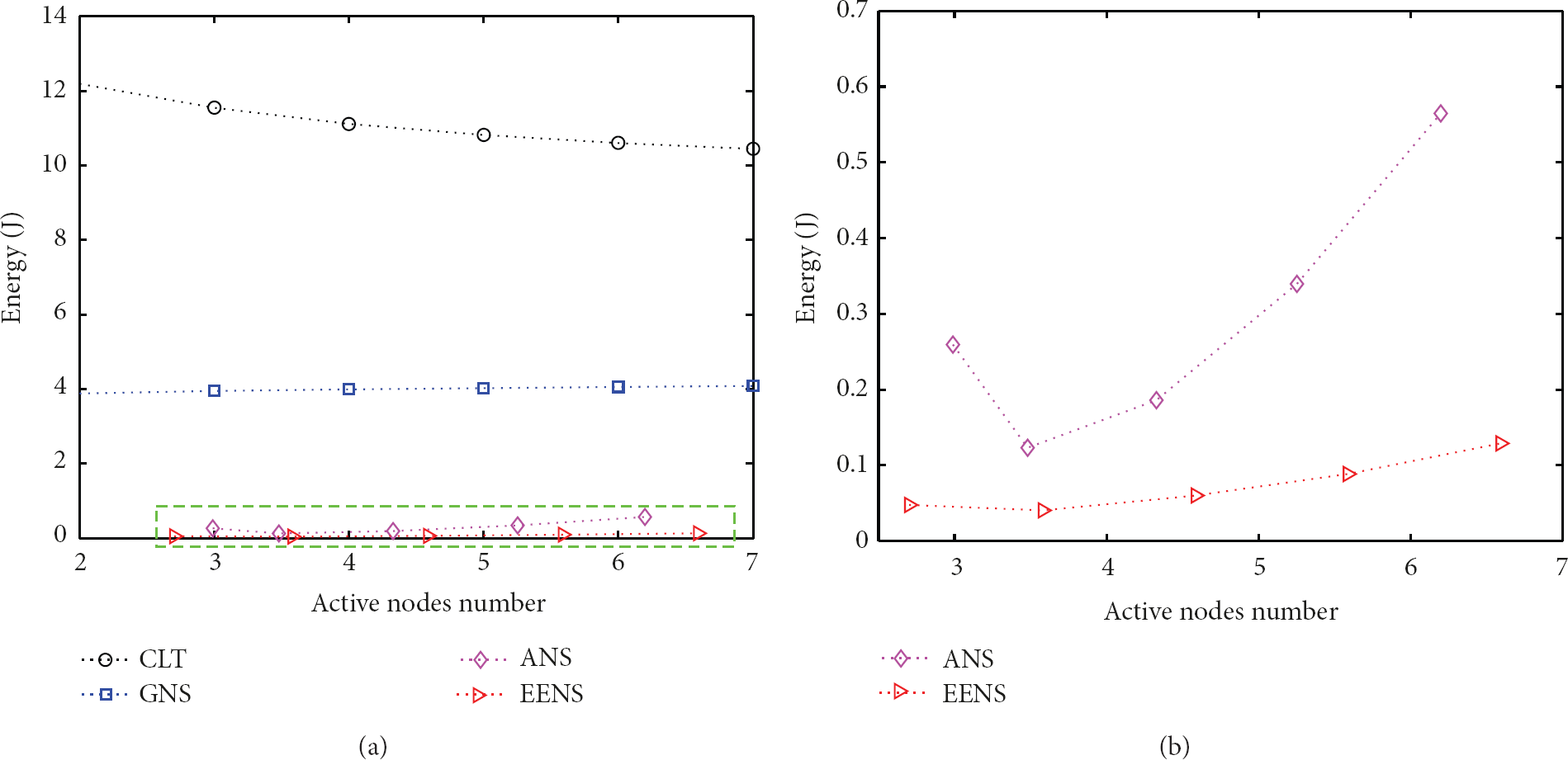
The energy consumption results are compared in Figures 6–9. In this simulation, we refer to the communication model for WSNs in [29]. The energy to implement operations is far smaller than the energy to transmit data, so the simulation ignores the energy for calculations. Assume that the energy to transmit l bits of data a distance of d meters is



The average energy consumption of the entire network per tracking process against the average number of active nodes. (a) The comparison result of CLT, GNS, ANS, and EENS. (b) The enlarged figure of the rectangular portion with green dashed line in (a).

The average energy consumption of the entire network per tracking process against RMSE. (a) The comparison result of CLT, GNS, ANS, and EENS. (b) The enlarged figure of the rectangular portion with green dashed line in (a).
The average energy consumption per node against the average number of active nodes. (a) The comparison result of CLT, GNS, ANS, and EENS. (b) The enlarged figure of the rectangular portion with green dashed line in (a).

The average energy consumption per node against RMSE. (a) The comparison result of CLT, GNS, ANS, and EENS. (b) The enlarged figure of the rectangular portion with green dashed line in (a).
Figure 7 gives out the average energy consumption of the entire network per tracking process against RMSE. Similarly to Figure 6, Figure 7(a) shows the comparison result of the four different algorithms and Figure 7(b) shows the enlarged figure of the rectangular portion with the green dashed line in Figure 7(a). From Figure 7(a) it can be seen that ANS and EENS can expend substantially less energy with meeting the requirements of tracking accuracy. To better see the performance comparison of ANS and EENS, Figure 7(b) shows that EENS has a significant decrease of energy consumption.
Note here that there is each inflection point in Figures 6(b) and 7(b). Its presence does not comply with the common apperception rule. The reason is the refreshing phenomenon which occurs in ANS when an active set of two nodes becomes collinear with the target [9], which leads to abundant nodes to join target tracking. For example, when the active nodes number is about 3 (the parameter
Figures 8 and 9 have shown the average energy consumption per node against the average number of active nodes and RMSE, respectively. The results of these two figures are in accord with Figures 6 and 7.
The above simulation results obviously show that the EENS method is effective and energy efficient. However, these simulations set the parameter
The performance comparison of ANS and EENS with different parameter settings.

Besides, the smaller the parameter α, the criterion of node selection as (20) is more considering the residual energy of the node than the information utility brought by the node, so EENS prefers to select the nodes which have more power, and then the energy consumption of the entire network is more even. This is consistent with the result of Figure 10. Figure 10 illustrates the residual energy statistics on individual nodes. It can be seen that the number of nodes which have less or more residual energy is smaller using

The residual energy statistics on individual nodes.
5. Conclusion
This paper proposed an energy-efficient node selection for bearings-only target tracking in WSNs. This method redefines the information utility of the idle node to join the active nodes set and introduces the factor of the residual energy into the objective function for node selection. It makes the criterion of choosing at most M nodes to participate in tracking. In the decentralized WSN, the proposed method only uses the local information of the node so it can save more energy and better accommodate to the change of networks. The incorporation of the factor of the residual energy makes the control of the entire network easier. According to the setting of the weighting parameter, the network can balance the energy consumption on nodes and extend the life of the network. Simulation results validated the good performance of the proposed method in terms of tracking RMSE, energy expenditure, and the residual energy statistics on individual nodes.
Footnotes
Appendix
Proof of the upper bound of the information utility
From (19), the information utility
Because the matrix
Because
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Basic Research Program of China (973 Program) under Grant 2011CB302901 and the National Science and Technology Major Project under Grant 2014ZX03005001-002.