
Abstract
A frequency response function- (FRF-) based direct decoupling method is proposed and applied to inverse analysis of a multicoordinate coupled system. The general formulation of inverse substructuring method for multicoordinate coupled multisubstructure system is derived. The proposed method is validated by a lumped mass-spring-damper model; the predicted FRFs of substructures are compared with the direct computations, showing exact agreement. The developed method offers an approach to back out the unknown substructure-level FRFs from purely system-level FRFs.
1. Introduction
In recent years, the structural dynamic community showed a rapidly increasing interest in the inverse problems of substructuring method [1–3], which aims to decouple the assembled system to obtain the unknown component frequency response functions (FRFs) [4]. This is of significant importance for components that cannot be measured directly or accurately, such as very delicate components. Many decoupling techniques have been well established. The impedance approach was first presented in 2008 by D'Ambrogio and Fregolent, and the promises and pitfalls of decoupling procedures were studied [4]. Then, they suggested the mobility approach [5, 6] which calculates the frequency response functions of the connection DOF on the unknown component from the complete known coupled system and another known component. The mobility approach was demonstrated to be able to produce more accurate results when appropriate internal degree of freedoms (DOFs) were used comparing with the impedance approach [7]. Sjövall and Abrahamsson [8] performed unknown component FRFs estimations in a linear least squares fashion, which was further improved by Cloutier and Avitabile [7]. To circumvent ill-conditioning around particular frequencies, D'Ambrogio [9] provided a dual domain decomposition method by adding a fictitious subsystem, which is the negative of the residual subsystem, to the coupled system. Most recently, Voormeeren and Rixen [10] presented a so-called dual approach to substructure (dis) assembly which allows imposing different equilibrium and compatibility conditions during decoupling in both the physical and modal space.
However, when both of the component-level FRFs are unknown and/or cannot accurately be measured, it is desirable to predict the individual components and coupling stiffness purely using the system-level frequency response functions. Lim [11–14] addressed this issue; the inverse formulation presented by Zhen et al. [13] provides a new method to obtain component FRFs and coupling stiffness from system FRFs purely. It is a very competitive and attractive method since no component-level FRFs are needed in advance. For instance, The promising successful applications of this technique in investigation of the vibration transmissibility and frequency response characteristics of motor vehicle and product transport system show its broad application respect in industry [14, 15]. However, in Zhen's work, only a two-substructure coupled system is considered. In our last paper [16], the inverse substructuring method for three-component coupled system with single coordinate coupling was proposed. Then, a step-by-step decoupling method was suggested and applied to study the component FRFs prediction problems [17, 18]. Though the method was obtained in the case of three-substructure coupled system, it can also be achieved in the system with multisubstructure by using a similar but more complex derivation. This paper focuses on development of a general formulation of FRF-based inverse substructuring method for multicoordinate coupled system based on direct decoupling method.
2. Inverse Substructuring Method for Multicoordinate Coupled Multisubstructure System
A free substructure X is shown in Figure 1, where o(x), i(x), and c(x) are the response, excitation, and coupling coordinates of substructure X, respectively. At the coupling coordinate, the substructure is connected to the rest of the system. The general equation of motion governing the dynamic response of the substructure is

where [M X ], [C X ], and [K X ] are the mass, damping, and stiffness matrices, respectively, and the subscript X refers to substructure X. Assuming a forced periodic excitation, the steady-state vibratory response in the frequency domain is

where ω = 2πf is the excitation frequency. This form is used to generate the necessary frequency response function matrix of the substructure X.

A general substructure representation.
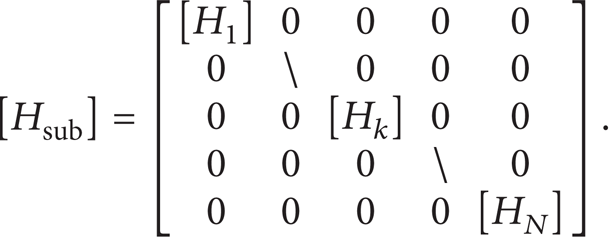
By applying the substructuring method, the system-level FRFs can be predicted by the substructure-level FRFs. Generally, the complete system response for a multicomponent mechanical system (see Figure 2) can be described as

where [Hsub] and

Multicoordinate coupled system.
Supposing that the internal coupling reaction force and external excitation vectors are related through a relationship matrix [T],

One can obtain the relationship between system-level FRFs and substructure-level FRFs:

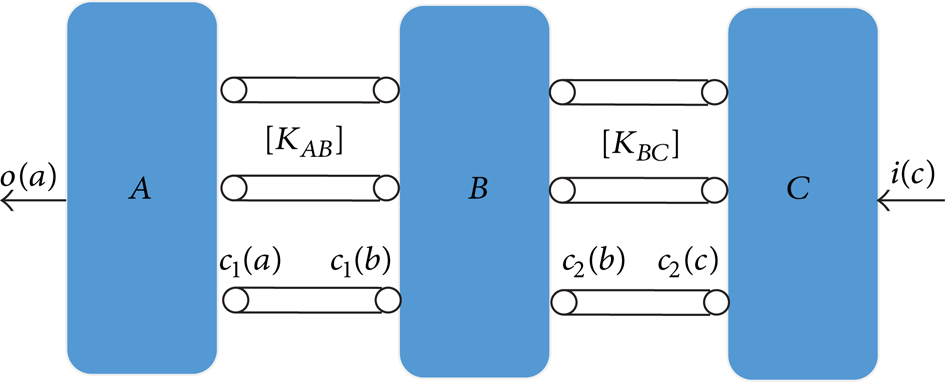
Consider a multicoordinate coupled system with three substructures A, B, and C coupled at interface c1 by a set of flexible connectors defined as [K
AB
] between A and B and at interface c2 by a set of flexible connectors defined as [K
BC
] between B and C (see Figure 3). From (3) to (6), it can be seen that [H
S
] is expressed by [H
A
], [H
B
], and [H
C
]. We give here the explicit expression of the system FRF

Multicoordinate coupled three-substructure system.
The above derivation develops a method for a multicoordinate coupled three-substructure system to obtain the system-level response by the FRFs of the three substructures and the dynamic stiffness of the coupling interfaces, and the FRFs of the free substructure A, B, and C must be computed in advance.
However, for many complex structure systems, the substructure-level FRFs may not be easily obtained. Moreover, the dynamic stiffness of the coupling interface may be unknown. If the physical system exists but is not conveniently separable into two or more substructures, it is desirable to express the problem in terms of measurable system-level FRFs. In the following paragraphs, this inverse problem will be formulated.
Enforcing the force equilibriums at the coupling coordinates leads to

from which we get

where [g1] is a substructure-level transfer matrix.
Similarly, for the complete coupled system, we get
where [g2] is a system-level transfer matrix.
Comparison of (3)–(10) leads to the formulation of multicomponent inverse substructuring approach. Taking three-substructure coupled system as an example, by enforcing the force equilibriums at the coupling coordinates c1(a) and c1(b) between A and B and at c2(b) and c2(c) between D and C and incorporating (3)–(6), we can obtain the expressions of the coupling dynamic stiffness as in (11)–(12), the FRFs of substructure A as in (13)–(14), the FRFs of substructure C as in (15)–(16), and the FRFs of substructure B as in (17)–(19) after a lengthy derivation:






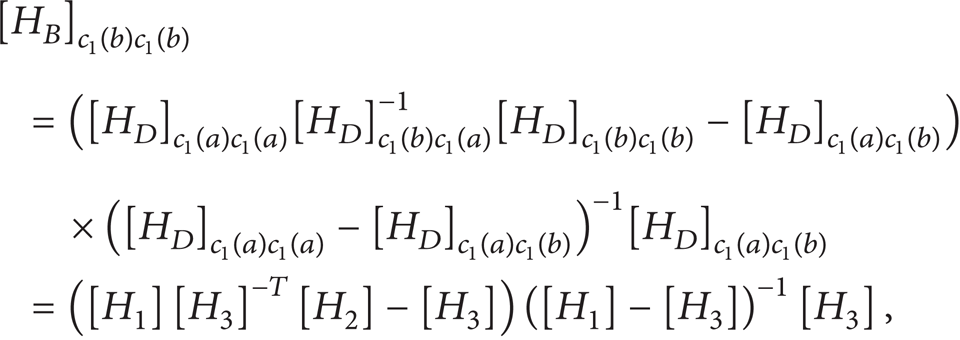











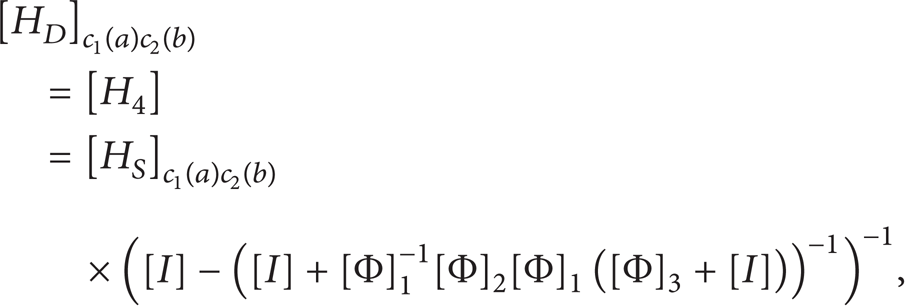
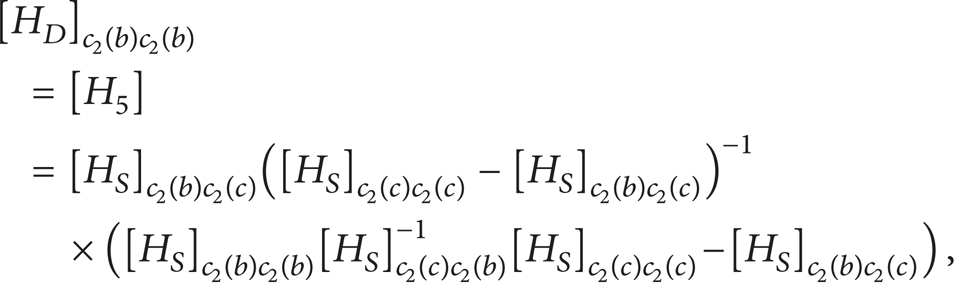
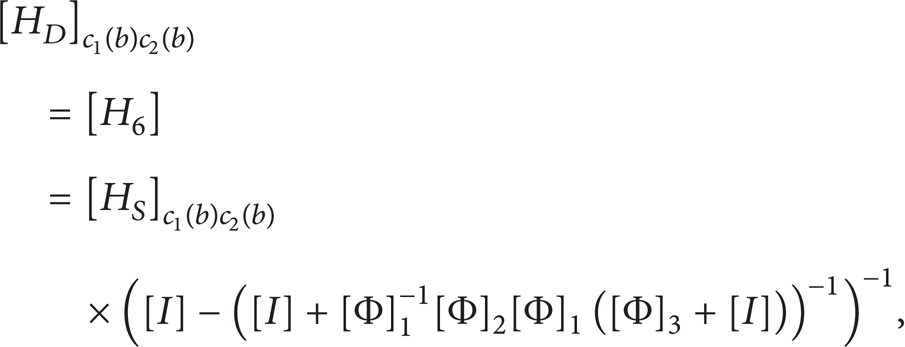






From (11)–(19), we can see that while the system-level FRFs needed are all measured, the unknown substructure-level FRFs and coupling stiffness can be predicted, and the concerned response at coordinate o(a) of substructure A due to an excitation at i(c) coordinate of substructure C can finally be obtained by using (5). Equations (11)–(19) give us an inverse substructuring method for the analysis of the dynamical characteristics of a three-substructure coupled system with multicoupling coordinates.
3. Numerical Validation Using a Lumped Parameter Model
To verify the validity of the inverse substructure proposed above, a lumped mass-spring-damper model with three substructures coupled, shown in Figure 4, is taken as an example for validation. The specific parameters of the system are listed in Table 1. The necessary FRFs of the free substructures and the coupled system are generated from (2); the computed system response functions are used to predict the free substructure dynamic characteristics that are compared to direct FRF calculations using (2) for substructures A, B, and C. Specifically, the comparison of predicted and exact
Model parameters for the lumped parameter model shown in Figure 4.

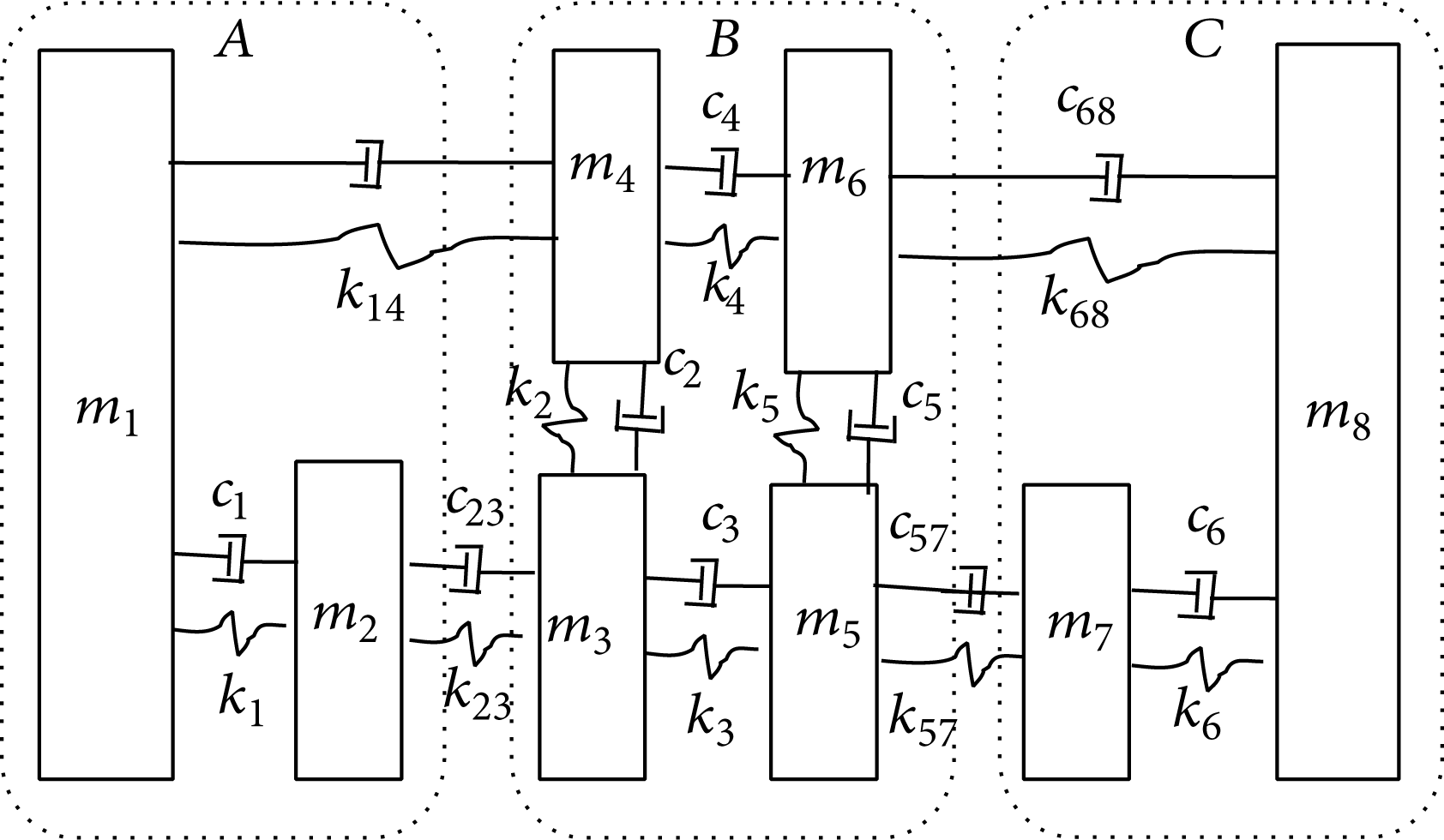
A lumped mass-spring-damper model.

Comparison of predicted (−) and exact (o) substructure A FRF

Comparison of predicted (−) and exact (o) substructure B FRF

Comparison of predicted (−) and exact (o) substructure C FRF
4. Conclusions
In this paper, a general formulation of inverse substructuring method for multicoordinate coupled system was developed and validated by a lumped mass-spring-damper model. The predicted FRFs of substructures are compared with the direct computations, showing exact agreement. The method offers an approach to back out the unknown substructure-level FRFs and coupling stiffness from purely system-level FRFs.
Conflict of Interests
The authors declare that there is no conflict of interests.
Footnotes
Acknowledgments
The authors would like to appreciate the financial support of the National Natural Science Foundation of China (Grant no. 51205167), the Research Fund for the Doctoral Program of Higher Education of China (Grant no. 20120093120014), the Project Supported by the Foundation (No. 2013010) of Tianjin Key Laboratory of Pulp & Paper (Tianjin University of Science & Technology), China, and Fundamental Research Funds for the Central Universities (Grant nos. JUSRP51403A and JUSRP51302A).