
Abstract
In M2M networks, most nodes are powered by battery; hence the overused nodes may easily be out of power, which causes the reduction of network lifetime. To solve this problem, it is helpful to balance network load into more nodes and links, so as to reduce network congestion. Multipath routing is a useful tool to reduce congestion, since data flow can be dispersed into multiple paths. However, most of the previous multipath routing algorithm is based on the path disjoint constraint, which leads to the lack of routing paths and the failure to disperse data flow into more links. In this paper, a directed acyclic graph based multipath routing algorithm for congestion minimization (DAGMR) is proposed, where different routing paths are confined in a directed acyclic graph (DAG) under time delay constraint. Furthermore, the data flow distribution is accomplished through partial capacity network to obtain the minimal multipath routing congestion factor. Simulation indicates that our algorithm can obtain lower congestion factor and formulates multipath routing graph with more nodes and links than algorithm with path disjoint constraint. In addition, our algorithm is a polynomial time complexity algorithm with nodes and links number of the entire network.
1. Introduction
At present, Machine-to-Machine (M2M) network has emerged as an innovative topic and is receiving huge attention [1]. One of the biggest advantages of M2M networks is that nodes directly communicate with each other without human intervention, so that costs can be reduced and services can be improved in a wide range of industries. However, performance of M2M network suffers a lot from low-power character of network nodes. Since most nodes in wireless M2M networks are powered by batteries, the overused nodes can easily be out of power, which leads to the reduction of lifetime of entire networks [2]. To solve above problems, network load should be balanced into different nodes and links so as to reduce the congestion of certain links and ease the burden of certain overused nodes.
The objective to balance network load is to reduce network congestion. To achieve this objective, multipath routing is a useful method, since network data flow can be dispersed into multiple paths, so as to reduce network congestion. Former researches of this aspect are as follows. Reference [3] represents multipath routing as an optimization problem of congestion minimization and proposes a polynomial time algorithm to solve the problem of congestion minimization under path number constraint and time delay constraint. Reference [4] proposes a bandwidth aware multipath routing algorithm for Ad Hoc network. References [5, 6] propose low complexity link state multipath routing algorithm. Reference [7] proposes a tree search based multipath routing algorithm. Reference [8] proposes a network decomposition and traffic balancing based multipath routing algorithm.
Those algorithms above are mostly based on the principle that different paths should be disjoint (including node disjoint and link disjoint). Although the probability of data session failure can be reduced through the path disjoint principle based multipath routing, network congestion cannot be minimized, due to the following two reasons. First, the paths disjoint constraint leads to the reduction of paths number, which is a negative impact on the balance of data flow. Second, while trying to find disjoint paths, some extra links with relatively low link capacity use rate would be ignored. For the example illustrated in Figure 1, although four parallel paths from S to D, which are depicted in solid line, exist, it is also helpful if some extra links crossing those paths can be utilized. For instance, when

An example of multipath routing, where additional links besides disjoint paths can be used to reduce network congestion.
In order to further reduce network congestion, this paper proposes a directed acyclic graph (DAG) based multipath routing algorithm. Our algorithm abandons the path disjoint principle, and the final multipath routing graph is obtained through maximum directed acyclic graph under time delay constraint (ML-DAG). Comparing with the former multipath routing algorithms, our algorithm constructs multipath routing graph with more nodes and links, and the network congestion can be efficiently reduced. The rest of this paper is organized as follows. Basic concept and the problem of multipath routing for congestion minimization under time delay constraint (MCMTD) are proposed in Section 2. In Section 3, the explicit description of three parts of entire algorithm with the corresponding time complexity analysis is proposed. Section 4 illustrates the simulation results, compared with the split multipath routing with maximally disjoint paths (SMR) [9] algorithm. Section 5 concludes the entire paper.
2. Basic Model and Problem Formulation
2.1. Basic Model
The topology of M2M network is modeled as a directed graph, For each link G is a graph with bidirectional edges, namely, for any For any Given Given
Furthermore, if for all A circle,
In addition, directed acyclic graph (DAG) [10] is one special kind of graph, which is defined as follows.
Definition 1.
A directed graph (as shown in Figure 2),

An example of layer structure for DAG, where entire graph is divided into 5 layers.
According to above definition, DAG has two important properties.
First, DAG can be divided into several layers, which is defined as follows.
Definition 2.
Given one DAG, Nodes of the first layer have no input links, namely, Links in each layer connect nodes in the same layer, namely,
Second, longest path [11] between two nodes can be defined in DAG as follows.
Definition 3.
Given one DAG,
Furthermore, following two types of DAGs are presented in this paper, which are useful throughput the paper.
Definition 4.
A DAG, time delay of the longest path from S to D is smaller than L, namely,
Definition 5.
Given G, an L-DAG, If
2.2. Multipath Routing for Congestion Minimization under Time Delay Constraint
As mentioned in [3], the multipath routing strategy for data transmission can be denoted as follows.
Definition 6.
Multipath routing strategy (MRS) from S to D is denoted as Link capacity constraint, namely, for all Network flow constraint, namely,
As mentioned before, the efficiency of multipath routing strategy is evaluated by the congestion factor [3], which is defined as below.
Definition 7.
Given
In above definition,
Problem MCMTD:
Minimize For all
3. Multipath Routing Algorithm for Congestion Minimization
Problem MCMTD can be summarized as constructing MRS to minimize Obtain one L-DAG Allocate data flow into links of
3.1. Obtain ML-DAG
Let
3.1.1. Network Simplification
Network simplification is helpful to exclude nodes and links with relatively long distance from S and D, so that the scale of original network can be reduced and further algorithm of obtaining ML-DAG can be simplified. To achieve this aim, the concept of distance between two nodes should be defined.
Definition 8.
Given G, for all If no path exists from Else, if
According to above definition, the distance between two nodes corresponds to the length of shortest path between two nodes, which leads to the following two theorems.
Theorem 9.
If
Proof.
Consider the following three situations.
If If If
In summation, Theorem 9 is proved.
Theorem 10.
Given ML-DAG,
Proof.
Assume that
According to above two theorems, if
Algorithm 11.
Network simplification is as follows.
If For any
3.1.2. Expanding Algorithm to Obtain ML-DAG
As mentioned before, ML-DAG can be obtained through gradually adding nodes and links. Each adding step is called expanding operation, as defined below.
Definition 12.
Expanding operation (OR) from Simple path
Expanding operation satisfies the following theorem.
Theorem 13.
Given
Proof.
Since
Let

Examples of adding path to L-DAG.
Assuming time delay of all links equals 1, then each graph in above figure is described as follows.
Original L-DAG, Let Let Let
These examples show that adding one path from lower layer to the higher layer is a better choice than adding one path from the higher layer to the lower one, according to the principle mentioned above. Our algorithm to obtain the ML-DAG is based on this phenomenon. Algorithm of acquiring ML-DAG (Algorithm 18) is illustrated through the flow chart in Figure 4.

Entire flow chart of Algorithm 18.
Some modular of the flow chat is explained as shown in Figure 4.
Two layers, M2 is used to find M4 judges whether path from M5 judges whether adding one path from M7 judges whether time delay constraint still holds after expanding operation.
The completeness of above algorithm is guaranteed by next theorem.
Theorem 14.
ML-DAG,
Proof.
To prove the theorem, it should be shown that all possible adding paths have been considered when algorithm ends. In the beginning of each expanding operation, it can be guaranteed that
3.2. Obtain Minimul Congestion Factor
After obtaining
Definition 15.
Given one L-DAG, for all
Furthermore, the residual graph after data flow distribution is defined as follows.
Definition 16.
Given one L-DAG,
Based on above definitions,
Theorem 17.
Proof.
Let Proof of monotone increasing is as follows: for all Proof of continuous is as follows: according to Definition 15, for all
Above theorem indicates that
Algorithm 18.
Obtain minimal congestion factor of MRS.
Let Let Obtain If else if else if Let Let Let Return
3.3. Time Complexity Analysis
Let

4. Simulation and Analysis
4.1. Introduction to Basic Network Environment
The simulation network, For For
4.2. Simulation and Comparison Analysis
As mentioned before, our DAG based multipath routing algorithm (DAGMR) does not satisfy the path disjoint constraint; hence, performance of DAGMR should be compared with “Split Multipath Routing Algorithm with Maximally Disjoint Paths (SMR)” [9], which is a typical algorithm that follows the path disjoint constraint.
First, the most important performance for the load balancing in Machine-to-Machine network is the congestion factor of MRS, which is illustrated in Figure 5.
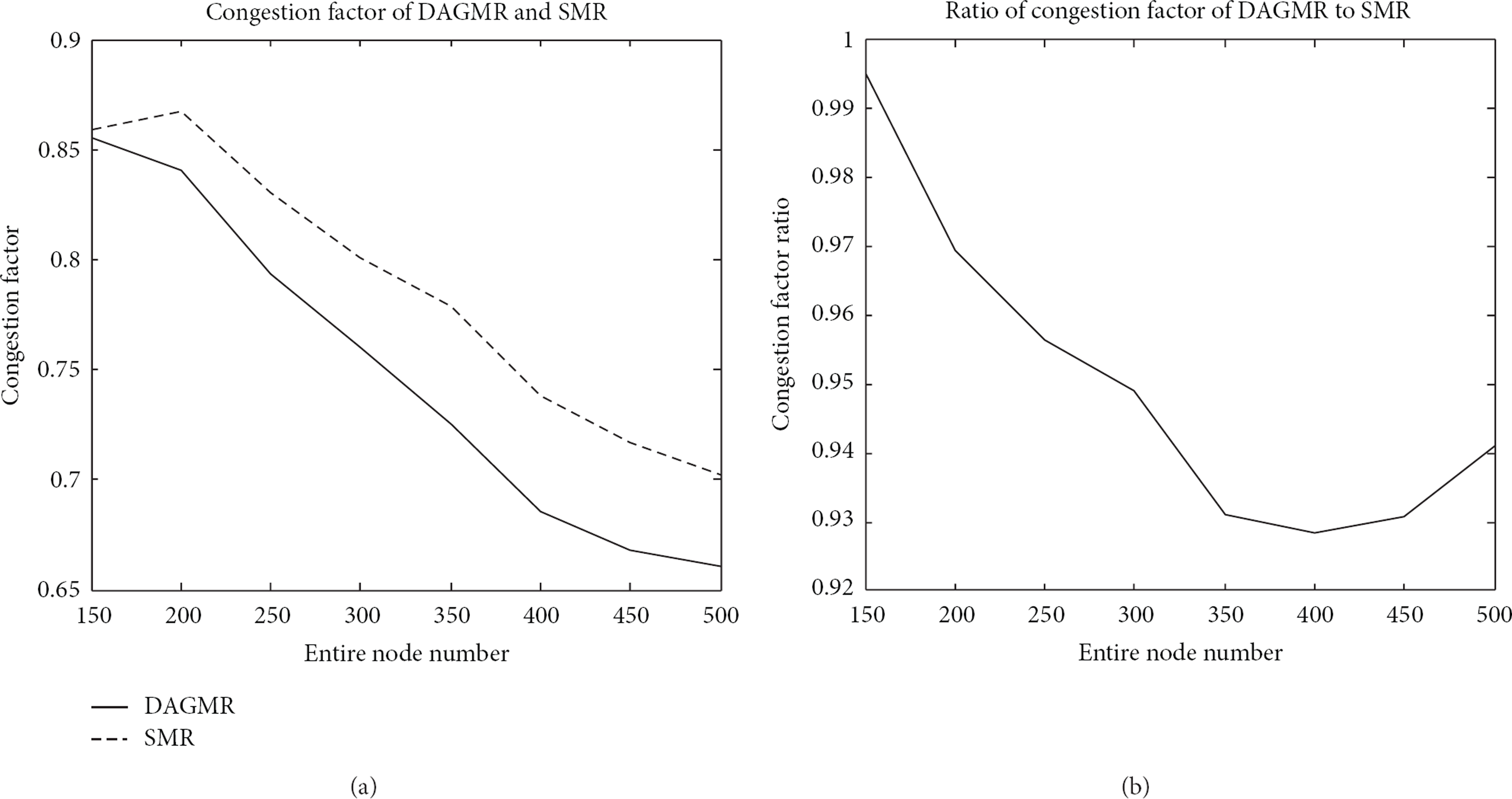
Simulation result of congestion factor with the change of network nodes number. (a) denotes final congestion factor of two algorithms. (b) denotes final congestion factor ratio of our algorithm to SMR.
Figure 5 indicates that DAGMR obtains lower congestion factor than SMR, and the congestion factor gap of two algorithms increases as the nodes number in whole network increases. Moreover, when more than 200 nodes exist in network, congestion factor obtained by DAGMR is
Second, DAGMR is helpful to distribute the data flow into more nodes and links, so as to ease the burden of certain overused nodes, as mentioned before. Hence, the number of nodes and links in the final multipath graph of DAGMR should be checked and compared with that of SMR.
Figure 6 indicates that nodes and links number in final routing graph obtained by DAGMR is larger than that obtained by SMR, and the gap of nodes and links number obtained in final routing graph by two algorithms increases as the network nodes number increases. Moreover, when entire network has more than 200 nodes, DAGMR subsumes

Simulation result of nodes and links number in final routing graph with the change of entire network nodes number. (a) denotes the final multipath graph nodes number of DAGMR and SMR. (b) denotes the ratio of final multipath graph nodes number of DAGMR to SMR. (c) denotes the final multipath graph links number of DAGMR and SMR. (d) denotes the ratio of final multipath graph links number of DAGMR to SMR.
In above simulations, the connection probability of any two nodes is a fixed value, and performance about different nodes number is illustrated. Next, let the nodes number of whole network be fixed as 300 and let connection probability of any two nodes be changed from 0.008 to 0.015. Then, congestion factor of MRS is illustrated in Figure 7.
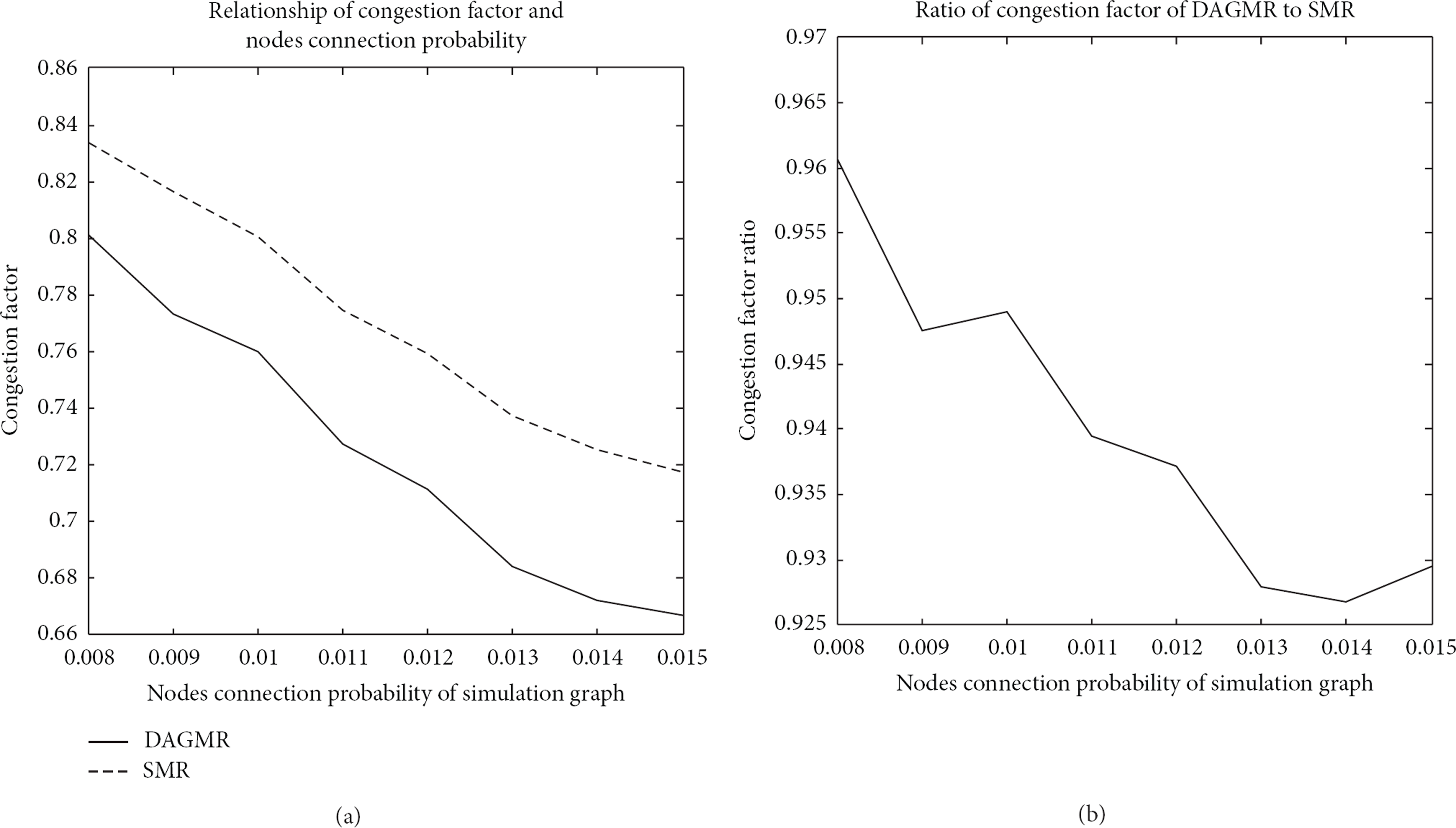
Simulation result of congestion factor with the change of connection probability between any two nodes when entire network nodes number is 300. (a) denotes the congestion factor of final multipath graph of DAGMR and SMR. (b) denotes the congestion factor ratio of DAGMR to SMR.
Figure 7 indicates that DAGMR obtains lower congestion factor than SMR, and the congestion factor gap of two algorithms increases as the connection probability increases. Moreover, when connect rate is larger than 0.09, congestion factor obtained by DAGMR is
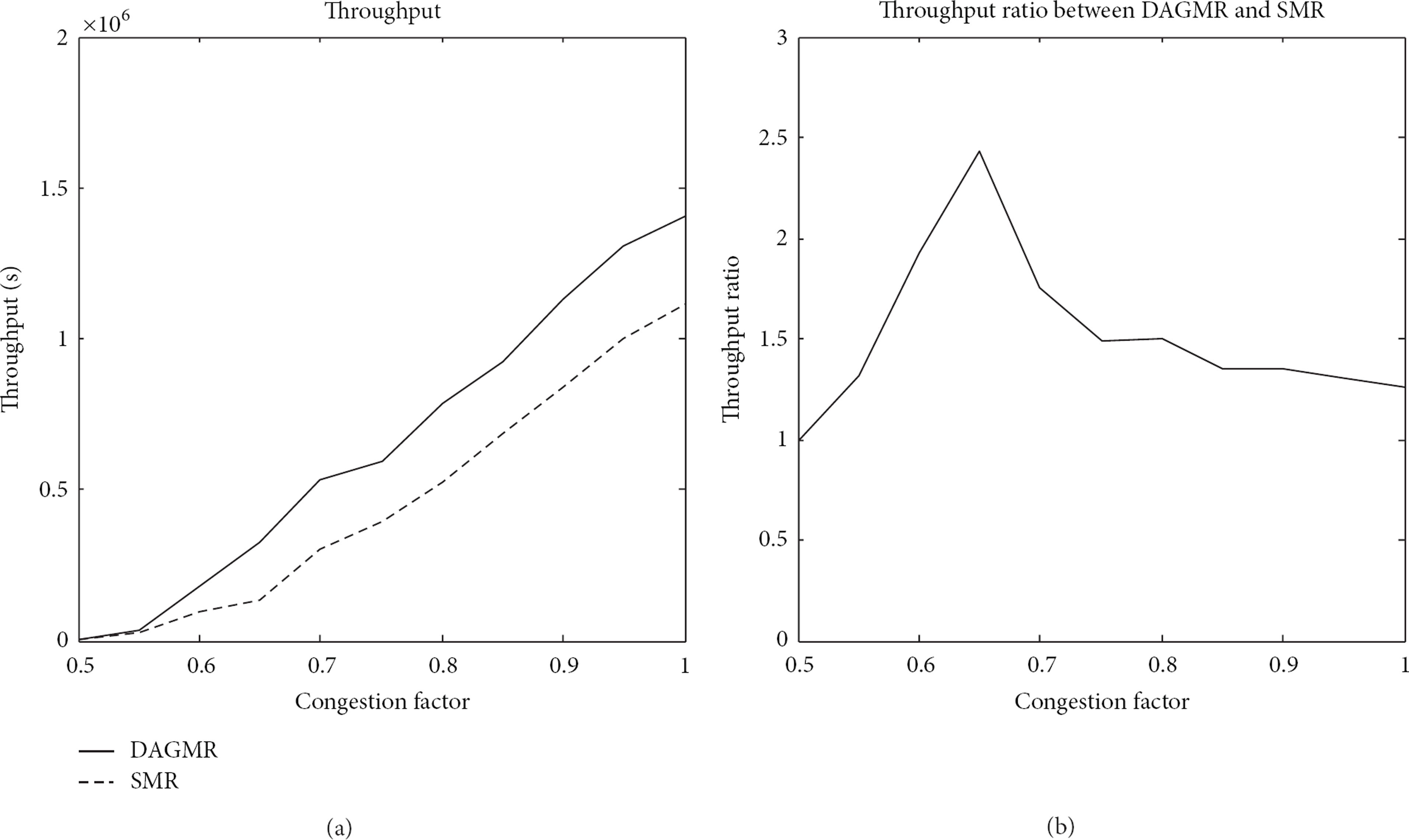
Furthermore, the throughput performance of DAGMR should be analyzed. Given source node, S, destination node, D, and time delay constraint L, let
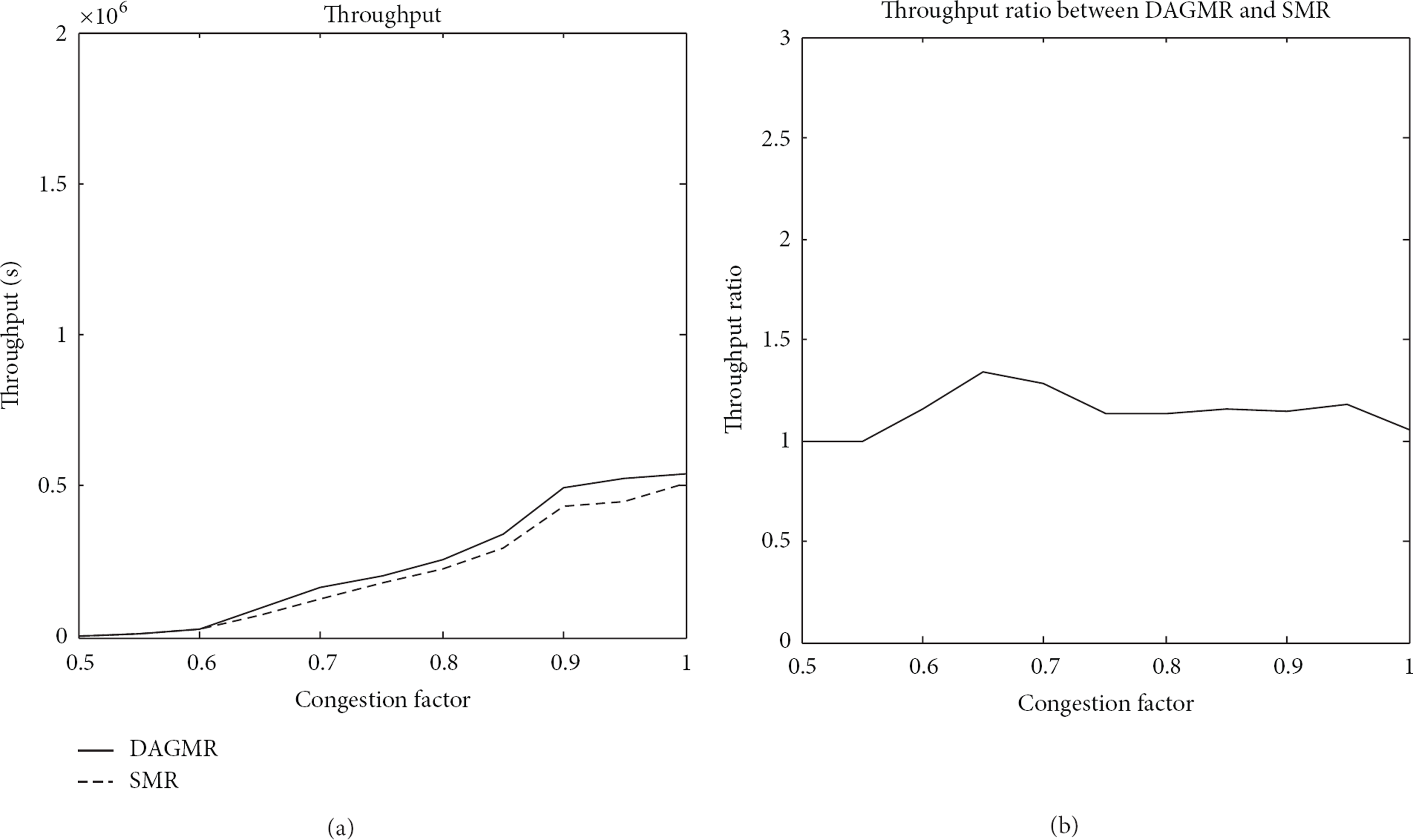
Simulation result of data throughput with the change of restricted congestion factor, when entire nodes number is 200.

Simulation result of data throughput with the change of restricted congestion factor, when entire nodes number is 300.
Simulation result of data throughput with the change of restricted congestion factor, when entire nodes number is 400.

Simulation result of data throughput with the change of restricted congestion factor, when entire nodes number is 500.
Figures 8, 9, 10, and 11 indicate the following aspects.
Throughput increases as the network nodes number increases, which is reasonable, since the more the nodes exist in network, the more the opportunity is to get extra routing path. Throughput obtained by DAGMR is larger than that obtained by SMR, and the gap of throughput increases as the restricted congestion factor increases. The throughput ratio between DAGMR and SMR is larger than 1 and reaches the peak value when restricted congestion factor is about 0.65.
In summation, our DAG based multipath routing algorithm (DAGMR) achieves lower congestion factor and subsumes more nodes and links in the final multipath subgraph than SMR, when data sent quantity is fixed in a flow session. Meanwhile, when restricted congestion factor is fixed, DAGMR obtains larger data throughput than SMR. Therefore, DAGMR is a better choice for network load balancing in Machine-to-Machine networks.
5. Conclusion
Multipath routing is a useful method to balance network load and reduce congestion and has received extensive research. However, most of previous multipath routing algorithms are not able to fully utilize the advantage of multipath, due to the premise that routing paths should be disjoint. In this paper, a new multipath algorithm is proposed, in which the path disjoint constraint is replaced by a principle that multipath should be confined into a directed acyclic graph under time delay constraint. Meanwhile, the partial capacity network is proposed, in order to obtain the final multipath congestion factor. Simulation shows that our algorithm achieves lower congestion factor and subsumes more nodes and links than the classical split multipath routing algorithm with disjoint paths. In addition, our algorithm is a polynomial time complexity algorithm with nodes number and links number of the entire network.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Nature Science Foundation of China (nos. 61171069, 61231013, and 60933012), the 973 Program of China under Grant 2011CB707000, and the National 863 Program of China no. 2011AA110102.