
Abstract
An enhanced model is proposed to describe static property of commercial braided pneumatic muscle actuators by including several important influencing factors. Elasticity of elastomer tube is considered and Ogden strain energy function is employed to describe its strain energy density. During pressurized process, small deformation of fiber occurs and is calculated using force balancing principle. Frictional forces within muscles are studied, which consist of friction within braid and that between bladder and braid. Isobaric experiments are performed and results verify the validity of the model.
1. Introduction
Braided pneumatic artificial muscles (PAMs, also known as McKibben muscles) have been bringing great changes to pneumatic techniques since they were first developed in the 1950s for an orthotic limb system. By numerous researchers’ efforts, many novel fabrication methods have been invented and mechanical properties are studied [1, 2]. In spite of various fabrication methods, the basic construction of different PAMs keeps invariant. McKibben muscles mainly include two components: a flexible inner cylindrical containment layer and an outer cylindrical braided woven layer with end caps to seal the cylinders. By applying pressure to the elastomeric bladder, large force in axial direction is produced. Compared with electric motors and pneumatic cylinders, PAM possesses many advantages, such as high power-to-weight ratios, compliance, and low cost of manufacture.
Generally, theoretical models for PAMs relate the generated force to the contractile length and applied pressure. Although various static and/or dynamic mathematical models have been proposed for the pneumatic actuators over the years [3–16], there is still much work to do. In previous researches, elasticity of fiber is ignored [14], friction between fiber mesh and bladder is supposed to be nonexistent [15], and rubber bladder is assumed to be linear elastic [16]. To improve the modeling accuracy of PAMs, friction within PAMs, elastic energy stored in tube bladder, and elasticity of outer fiber braid should be taken into account. In this research, friction inside PAMs consists of fiber-on-rubber frictional force and fiber-on-fiber friction; elastic energy stored in rubber bladder is described by Ogden material model, which is more in line with the actual situation than linear elastic model. This paper is organized as follows. Section 2 establishes the novel model, and Section 3 validates the theoretical model by comparing the simulated contractile force with experimental data. In this research, PAM (type of DMSP-20-120-RMCM) made by FESTO Company is used (shown in Figure 1). This improved model would lay a solid foundation for accurate position controller design, which would be adopted in posture control in a jumping robot actuated by PAMs.

Photographs of PAM.
2. Static Model of PAM
Static force model developed in [1] is the basis of the further study in this paper. Firstly, its calculating process will be displayed briefly.
2.1. Basic Static Physical Model
In the basic static model, several hypotheses are made: (1) the actuator is completely cylindrical in shape (e.g., noncylindrical caps are neglected); (2) all frictional forces are neglected; (3) elastic energy stored in bladder is ignored; (4) the fiber line is inextensible and always in contact with braid (i.e., ignore the elastic energy stored in fibers).
From assumption (1) and Figure 2, the geometric relationships are derived as follows:

where θ is the angle of fiber thread with longitudinal axis, L the length of PAM corresponding to some certain value of θ, D the corresponding diameter of PAM, n the number of times a strand encircles PAM's circumference from end-cap to end-cap, b0 the length of single nonextensible strand, and V the volume of muscle actuator.

Relationship of geometric parameters in PAMs in completely cylindrical shape.
If the work done by applied air is Win, the output work done by PAM during its contractile process is Wout and there is no energy loss during the transformation; (2) can be acquired on the basis of principle of virtual work:

From (1)–(2), ideal contractile force in (3) is obtained:

Although model in (3) globally approximates the static properties of PAM, large error occurs between numerical response and experimental data.
2.2. Inclusion of Elastic Energy Stored in Rubber Bladder and Fiber Braid
In fact both inner rubber tube and outer fiber braid produce deformation during contractile process. Part of pneumatic energy applied by input air is transformed to elastic energy stored in rubber bladder and outer fiber mesh during radial expansion. The elastic energy stored in elastic components (bladder and braid) of PAM has a reduction effect on actuation force. This section will consider the material properties of the inner bladder. Only cylindrically symmetric configurations are considered in the undeformed and deformed states. If t0 and t are thickness of bladder in natural and pressurized state, respectively, then the volume occupied by the bladder is given as follows:

where R0 and R are radius of outer surface of muscle in natural and pressurized state, respectively. Because of incompressible property for rubber tube, its volume remains constant in actuating process. Consequently, the volume of bladder can be calculated by subtracting V r from volume of PAM in (1):
2.2.1. Accounting for Elastic Energy Stored in Fiber Mesh
Although the fiber has high stiffness, it produces extension (maybe small) during pressurization of PAM. In this paper, extension of fiber is obtained using force balance principle. Comparing with pressurized forces inside PAM, elastic force produced by rubber is very small and can be neglected in this section.
Radial force balance equation is analyzed in Figure 3 and the following:

where Fstrand is the elastic force applied by fiber mesh. Assuming fstrand symbols the elastic force of one strand and N is the number of strands in the braid, the relationship between Fstrand and fstrand is given by


Radial force balance within muscle.
Solving (7), we get fstrand:

Fiber material is nylon and is assumed to be linear relationship between stress and strain, so fstrand can be expressed in the following:

where E is Young's modulus of nylon material and A
s
0
is cross-sectional area of one fiber in resting state. If initial diameter of single strand is D
s
0
, then
Combing (8) and (9), length of single fiber corresponding to certain pressure p can be solved:
Strain energy density is obtained based on the assumption of linear relationship between stress and strain

Elastic energy stored in braid during actuating process is obtained:

Using principle of virtual work, actuating force in axial force is given as follows:
2.2.2. Accounting for Elastic Energy Stored in Elastomer
To improve the accuracy of the mathematical model, the elasticity of rubber tube must be considered. It is necessary to formulate an appropriate strain energy density function to describe elastic energy in the elasticity body. In this paper, an Ogden material model is employed to describe rubber elastic behavior. The rubber material is assumed to be isotropic, incompressible, and nonlinear elastic.
With the assumption of initial isotropy and incompressibility, the strain energy density function W based on Ogden model can be described with main strain variables λ i (i = 1, 2, 3) as follows:

where α i is dimensionless constants and μ i is the dimensional Ogden material constants. Based on the strain in longitudinal and circumferential directions of the rubber and the incompressibility condition, relationship between λ i (i = 1, 2, 3) is given:

Principle extension ratios λ1 λ2 are given, respectively, as

With the assumption of completely cylindrical in the shape of PAM and constant volume of bladder, the outer diameter of the muscle can be obtained from (1):

The differentiation of D and b with respect to muscle length L is calculated, respectively:

Using (18), differential equations of λ i (i = 1, 2, 3) with respect to muscle length L are acquired in the following:

Based on principle of virtual work, actuating force in longitude direction is given as follows:

Combining the above equations, portion of actuating force, caused by elastic energy stored in rubber bladder, denoted by Fbladder, can be calculated.
2.3. Inclusion of Friction
A force-displacement hysteresis in contracting and resuming process has been observed in many previous researches. This is mainly caused by frictional forces within muscle. Section 2.3.1 calculates the frictional force within braid mesh; Section 2.3.2 shows the friction between rubber bladder and fiber mesh.
2.3.1. Inclusion of Friction between Fibers
Friction within fiber mesh mainly refers to the Coulomb friction between strand and strand. When PAM is working, strands have the motion (or trend of motion) of moving against one another. Tondu and Lopez studied the static dry friction and proposed an expression to calculate the friction [2]. Davis and Caldwell improved the expression by introducing a constant Scontact [12]. Consider
where f is coefficient of friction within braid, P is pressure applied to muscle, θ0 is the minimum angle of fiber thread with longitudinal axis (or known as the initial angle), θ is the angle of fiber thread with longitudinal axis during pressurization, Scontact is the contact area between the braid strands, E is Young's modulus of nylon strand, ν is the Poisson ratio of the strand material, and F comp is the force pushing the two strands together.
In this paper, strand-on-strand friction is calculated using (21).
2.3.2. Inclusion of Friction between Rubber Tube and Fiber Mesh
Few researchers included frictional force between braid and rubber tube in their mathematical models. To evaluate the importance of this friction, this paper proposes an equation for the friction. In Festo Fluid muscles, strands and bladder are mixed together and the whole cylindrical surface of strands would be completely in contact with bladder. Stress between inner bladder and outer braid is equal to the pressure applied by air in the tube. Friction can be given as follows:

where f′ is coefficient of friction between braid and rubber tube.
2.4. Integrated Form of Static Actuating Force of PAM
Chou and Hannaford have pointed out that hysteresis between force and displacement exists within PAM [1]. In our experiment, the hysteretic property is also observed in Figure 5. Actually, this hysteretic loop is caused by friction within PAM, which has been discussed by Chou and Hannaford [1]. The hysteresis phenomenon means that friction within PAM is in the identical direction with PAM's velocity during exhaust process, while in the opposite direction with PAM's velocity during contractile process. From previous analysis, strand-on-strand friction and braid-on-bladder friction are acquired. Consequently, the integrated static force of PAM can be expressed as follows:

3. Experiments
3.1. Description of Experiment
To verify the validity of the theoretic model proposed in this research, an experimental setup shown in Figure 4 is constructed to compare experimental results with numerical data. Air produced by air compressor is transported to the pneumatic cylinder which imposes force to PAM. Proportional regulator (type of ITV1050-212N, SMC) and manual regulator (type of AR20-02, SMC) tune the amount of air flowing from air compressor to the PAM and pneumatic cylinder, respectively. Position sensor is attached at the free end of muscle and measures the contractile length of PAM. Gauge pressure transducer (type of PSE510-R06, SMC) at the air inlet of the actuator is used to record the air pressure. Force sensor in the apparatus provides information of contractile force. Data acquisition card transforms analog data acquired from position, pressure, and force sensors to digital signal, which is read by program in Microsoft visual C++ 6.0. PAM (type DMSP-20-120-RM-CM) manufactured by FESTO Company is used in this test and its geometric parameters are shown in Table 1. The Ogden constants of rubber are referred to in [13].
Geometric parameters of DMSP-20-120-RM-CM.

Experimental apparatus.
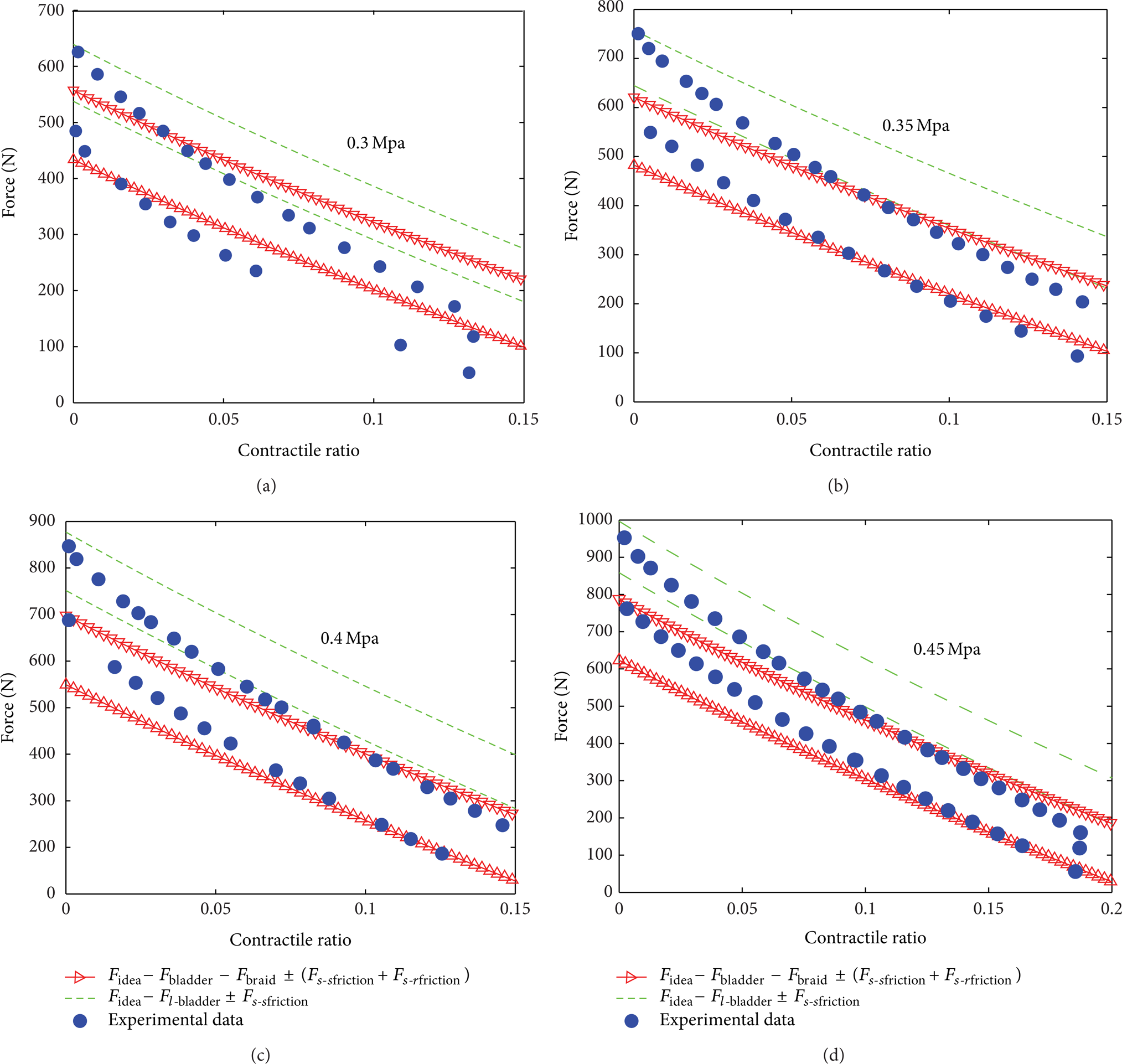
Experimental and simulation curves at different pressures for PAM.
Isobaric tests are performed in this paper. Predetermined constant pressure is applied to PAM by manual regulator; then the force imposed by pneumatic cylinder increases slowly from zero to some predetermined value and then decreases in an opposite way. During one working period of PAM, contractile force, contractile length, and corresponding constant pressure within PAM are recorded. Each trial is repeated five times and average value is acquired; then four sets of experimental data between contractile displacement and force are plotted in Figure 5.
3.2. Discussion
To better study the relationship between PAM's force and displacement, contractile ratio ε is introduced as follows:

where L0 is the initial length of PAM and L is the length corresponding to some certain pressure p.
To validate the effectiveness of the proposed model, theoretical curves are compared with experimental data. In Figure 5, Fidea-Fbladder-Fbraid ± (Fs-sfriction + Fs-rfriction) represents the proposed model of this research, while Fidea-Fl-bladder ± Fs-sfriction means model in previous research. In Figure 5, Fl-bladder represents elastic force of rubber under the assumption that rubber is linear elastic. From comparison between three type curves, we find that simulation of the new model captures the actual trend of pneumatic actuators much better. In Figure 5, the value of hysteresis width is about 150[N]. The hysteresis is caused by internal friction inside PAM.
4. Conclusions
In this paper, an enhanced theoretical model describing static response of PAM is developed. To describe the behavior of the elastic bladder, an Ogden strain energy function is employed. Fiber mesh absorbed energy during pressurized process is calculated based on force balancing equation. Friction within PAM consists of two parts: one is strand-on-strand friction and the other is friction between outer braid and inner bladder. Force-displacement hysteresis in one cycle of working process is observed in experiments. Comparison between the experimental data and simulated curves demonstrates the effectiveness of the novel proposed model. This new model will lay a solid foundation for accurate position control of PAM. The future work is to study the position control algorithm of PAM and devise a jumping robot actuated by PAM.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work was supported by National Natural Science Foundation of China (51005052), the Ministry of Education Doctoral Education Foundation (200 802131005), Harbin Institute of Technology Research and Innovation Fund (HIT.NSRIF.2009016), and State Key Laboratory of Independent Topics (SKLRS201001C).