
Abstract
In a fully mechanized mining face, the coordinated control of coal mining machines has a significant promoting effect to perfect the mining environment and improve the efficiency of coal production and has become a research focus all over the world. In this paper, a cooperative control method based on the integration of fuzzy logic theory and neural networks was proposed. The improved Elman neural network (ENN) through a threshold strategy was presented to predict the running parameters of coal mining machines. On the basis of coupling analysis of coal mining machines, the expert knowledge base of scraper conveyor was established based on fuzzy logic theory. Furthermore, the probabilistic neural network (PNN) was applied to evaluate the running status of scraper conveyor, and the cooperative control flow was designed and analyzed. Finally, a simulation example was provided and the comparison results illustrated that the proposed method was feasible and superior to the manual control.
1. Introduction
Industrial process control has been developed for many years and with the improvement of productivity, the complexity and uncertainty of system control are becoming more and more serious. Traditional control theory is difficult to meet the performance requirements of control system, especially multiple equipment coordinated system. In order to adapt to the changes in control tasks and goals, system control methods are developed from the classical feedback control theory to the intelligent control theory based on neural networks [1].
As a special multiple equipment coordinated system, the control of coal mining machines in fully mechanized mining face has become a research focus to improve the control effect and coal mining efficiency. However, because of outdated control technology, manual operation is the most frequently used in the process of coal mining [2]. Due to the poor mining environment, manual operation is time-consuming, laborious, and inefficient. Moreover, physical condition and mental state of the operator have effect on the accuracy, reliability, and safety of mechanical and equipment control, which may lead to accidents in fully mechanized mining face. Therefore, it is necessary to study the cooperative control theory and method for fully mechanized mining machines; thus, the field operators can be reduced and the safe and efficient production in fully mechanized mining face can be improved.
For the fully mechanized mining face, the coal mining machines mainly include shearer, hydraulic supports, and scraper conveyor. In order to achieve the coordinated control of the coal mining machines, an appropriate intelligent cooperated control method should be presented to enable the mining machines work automatically and cooperate with each other and adaptively adjust its own working state according to the actual situation [3]. In this paper, a coordinated control method based on fuzzy logic theory and neural networks is proposed to adapt to the complex, dynamic, and uncertain control requirements of the fully mechanized coal mining face [4, 5]. The improved ENN is proposed to predict the running parameters of coal mining machines, and the fuzzy logic theory is presented to establish the expert knowledge base for scraper conveyor, which provides the samples for PNN. The simulation results indicate that the proposed method can improve the mining efficiency, reduce the energy consumption, and may provide the foundation for the unmanned coal mining face.
2. Literature Review
For coordinated optimization control methods, many researchers have worked on them and proposed different solutions since the last decades. Both fuzzy and neural networks have been widely used in the cooperative control applications with unknown model parameter or external disturbances, including the cooperative control of multiple manipulators, higher-order nonlinear systems, teleportation system, and multiple robots. In [6], a dynamic model of heterogeneous aircraft network control system was established to obtain controlled conditions of the system based on algebraic graph theory and traditional control theory. A spacecraft formation flying cooperative control method based on consistency theory was proposed to improve the spacecraft cooperative control performance in [7]. A coordination strategy based on biomimicry of social foraging to achieve autonomous air vehicle cooperative search and engagement was proposed in [8]. Reference [9] presented global exponential synchronization and concurrent synchronization in the context of Lagrangian systems control to ensure adaptive synchronization and partial-state coupling. In [10], the behavior-based intelligent control architecture was established to calculate and predict dispersion control action through the sensor signal, which have been applied to multiple underwater robots coordinated work. In [11], a master-slave robot coordinated motion control solution was proposed based on Lyapunov method. Reference [12] presented a cooperative search method for multiple stationary ground targets by a group of unmanned aerial vehicles with limited sensing and communication capabilities. In [13], a least squares method was used to estimate the gradient of a scalar field to locate the position of unmanned aerial vehicles. A double closed loop control structure to realize the position/force cooperative control for automatic guided vehicle was proposed in [14]. In [15], the cooperative control structure mode on multisystem and the centralized cooperative strategy were used to improve the safety protection capability of automobile while driving. A new formation control methodology was presented by using the concept of cross-tensegrity structures in [16]. In [17], an information-theoretic approach based on decentralized data fusion for distributed and coordinated control of a multirobot sensor system was proposed. In [18], an acute angle switching algorithm was applied in the multirobot systems. In order to achieve the coordinated manipulation of multiple robot arms, a coordinated dynamic hybrid control method was applied to multiple robotic mechanisms [19]. A coordinated control method for two robot arms based on exact system linearization and appropriate nonlinear feedback was proposed in [20]. A coordinated control method was proposed to solve the problem of cooperative control of multiple heterogeneous autonomous in [21]. In [22], an intelligent cooperative control system for unmanned air vehicles was introduced based on the machine learning component. In [23], the decentralized coordinated control method was presented based on the strongly nonlinear and coupled characteristics of multi-infeed DC (MIDC) system. In [24], a method based on multiple objective behaviour coordination extended to multiple robots was proposed, which provided mechanisms for distributed command fusion across a group of robots to pursue multiple goals of multiple robots in parallel. A coordinated motion control method for two manipulators was proposed in [25] and the concept of master/slave relationship between two manipulators was avoided. In [26], the intelligent cooperative control architecture was proposed, which utilized the real-time observations and performance metric in conjunction with learning methods to generate a more intelligent planner response. In [27], a cooperative machine learning system was described and designed and was applied in multiple machine coordinated system.
Although many scholars have worked on the coordinated control technologies and the related researches have been applied in the industrial control, aerospace and robot technology, and so forth, these control methods cannot be directly applied in fully mechanized mining face because of special mining machines and poor working conditions. Therefore, this paper presents a multilevel coordinated control method. Firstly, the coupling analysis of coal mining machines on fully mechanized mining face is presented. Secondly, an expert knowledge is established through the fuzzy logic and a method based on improved Elman neural network is proposed to predict the parameters of coal mining machines. Furthermore, probabilistic neural network is used to evaluate the running status of scraper conveyor. Finally, a simulation example was provided.
3. Fully Mechanized Mining Face
3.1. Collaborative Automation of Coal Mining Machines
A fully mechanized mining face is equipped mainly with coal mining machines, including the shearer, scraper conveyor, and hydraulic supports, as shown in Figure 1. The shearer moves and cuts the coal on the scraper conveyor at a certain speed. Then, the coal is delivered to the transshipment point by the scraper conveyor. Finally, the hydraulic supports propel the scraper conveyor, prop the goal, and maintain the stability of the surrounding rocks.

Collaborative automation of coal mining machines in fully mechanized mining face.
3.2. Coupling Analysis of Coal Mining Machines
At the beginning state of fully mechanized mining process, the states of shearer, hydraulic supports, and scraper conveyors are normal, and the external load is zero or light. After production, the coupling relationship between the parameters of coal mining machines can be described as follows.
From the overall perspective, the input-output relationship of scraper conveyor can be expressed as follows:

where F L is the equivalent load of scraper conveyor, v h is the running speed of scraper conveyor, U h and I h are the power supply voltage and current of scraper conveyor, respectively.
From the perspective of energy conservation, the work of shearer can be described as follows:

where F s is equivalent load of shearer; v q is the running speed of shearer; U d and I d are the supply voltage and current of shearer traction motor; U c and I c are the supply voltage and current of shearer cutting motor.
For a certain extent, the load of scraper conveyor is determined by the load of shearer and there is a certain linear relation between them, which can be expressed as follows:
where k is a proportionality coefficient.
For hydraulic supports, F e is assumed as the equivalent resistance when hydraulic supports are raising or lowering columns. v e is the equivalent running speed. We can obtain the following equation:

where U e and I e are the supply voltage and current of emulsion pump station, respectively.
According to the above analysis, a global coordinate coupling control relationship between the coal mining machines can be constructed, as shown in Figure 2.

Global coordinate coupling control relationship of coal mining machines.
4. The Proposed Method
In this section, an improved Elman neural network is proposed to predict the parameter values of coal mining machines. The expert knowledge base is established through fuzzy logic theory and would be used to provide the training and testing samples for the probabilistic neural network. Finally, the cooperative control flow based on the above algorithms is designed and analyzed.
4.1. Improved Elman Neural Network
As a special kind of time series forecasting method, Elman neural network consists of feed-forward neural network and local regression network, which is suitable for solving the problem of time series prediction. Compared with BP neural network, Elman neural network adds the link layer to form the local feedback and the transfer function of link layer is linear. Furthermore, a delay unit is added to memorize the state of last time and combines primary inputs as the inputs of hidden layer, which makes the Elman neural network own a dynamic memory function. In Elman neural network, the transfer function of output layer is linear, but the transfer function of hidden layer is nonlinear. Hidden layer not only accepts data from input layer but also receives the memorized data from link layer. Therefore, the output of network at different times may be different for the same input. The structure of Elman neural network can be shown as in Figure 3 [28].

The structure of Elman neural network.
Elman neural network can express functions with a finite number of discontinuities. For a multi-input and multi-output network, the output of link layer is assumed as X c . The input and output of hidden layer are X h and Y h . Under the influence of the external input time series U, the output of network is Y. The relevant parameters can be calculated as follows:

where Xc1(k) is the output of connected layer 1, Xc2(k) is the output of connected layer 2, W1, W2, W3, and W4 are corresponding connection weight matrix, α and γ are the feedback factor of connection layer 1 and connection layer 2, respectively, g(·) is linear combination of the hidden layer input, and f(·) is sigmoid-type activation function and can be set as f(x) = 1/(1 + e−x).
The actual output of the kth step can be assumed as y g (k) and the network error can be calculated through the following equation:

The connection weight matrixes of W1, W2, W3, and W4 can be updated according to the gradient descent method, which can be expressed as follows [29, 30]:
where η1, η2, η3, and η4 are the learning steps of connection weight matrixes W1, W2, W3, and W4, respectively,

In order to avoid the problem of falling into locally optimal solution, an improved strategy is proposed and can be described as follows. According to [31, 32], the output feedback control methods are widely used in the improvement of traditional neural networks. In this paper, a threshold value is applied to evaluate the prediction performance of network. The threshold value is generated through the comparison between network output results and training samples in the training process of network. If the difference meets the condition of threshold value, the trained network can be accepted. Otherwise, the network should be retrained. The forecast model based on improved Elman neural network can be shown in Figure 4.
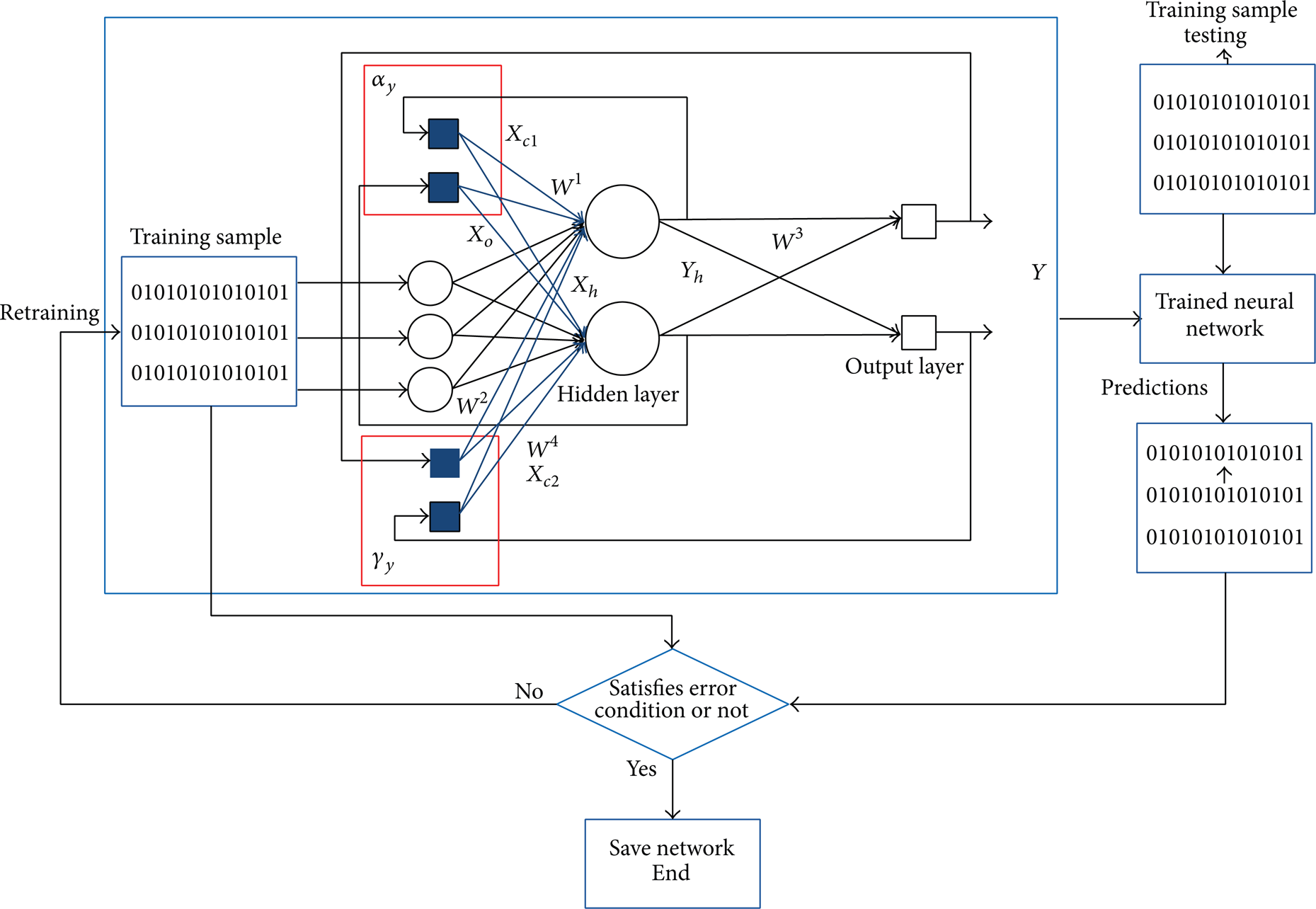
Forecast model based on improved Elman neural network.
In the prediction process of Elman neural network, it always takes the last samples as learning objects to update the current network, and the length of training sample is determined through the preset control precision of a system.
4.2. Establishment of Expert Knowledge Base
An expert knowledge base is established according to the existing knowledge and experiences and should contain various system states [33, 34]. For a fully mechanized mining face, the complex working conditions of coal mining machines result in the fuzziness and randomness of their working states. Therefore, this paper presents fuzzy logic theory to establish the expert knowledge base for coal mining machines.
Fuzzy control theory was firstly proposed by Zadeh in 1965, which was gradually applied in the actual industrial production. Fuzzy logic can imitate human logic to describe the uncertain parameters and can be combined with computer control technology to achieve automatic production process. The fuzzy rules are usually stored in knowledge base in the form of
According to the coupling analysis of coal mining machines, evaluating the status of scraper conveyor is the core of the collaborative control. Thus, the expert knowledge base of scraper conveyor should be established firstly. After analyzing the structure of scraper conveyor, we can take the current and temperature status of front motor and back motor as the assessment criteria and obtain the running status of motors. Then, the working status of scraper conveyor can be evaluated through the fuzzy logic.
The fuzzy membership function of motor current can be expressed as follows:

where I is the current value of front motor and back motor and μ1 is the fuzzy membership value.
The current status of front motor (FM) and back motor (BM) can be stipulated through the fuzzy membership value, which can be described as {Stable, Relatively Stable, Fluctuating, Abnormal}. The corresponding membership intervals are (0, 1.5], (1.5, 2.5], (2.5, 3.5], and (3.5, +∝), respectively. In order to discuss conveniently, the current status space of front motor can be marked as {FMCur_1, FMCur_2, FMCur_3, FMCur_4} and the current status space of back motor can be marked as {BMCur_1, BMCur_2, BMCur_3, BMCur_4}.
Assuming that T1 and T2 are the temperature values of front motor and rear motor, μ2 and μ3 are the fuzzy membership values. According to the experiences, the change intervals of T1 can be chosen as (0, 56], (56, 60], and (60, +∝], respectively, and the corresponding memberships are defined as (0, 2], (2, 4], and 4. The fuzzy membership function is assumed as μ2 = kT1 + b; thus we can get the coefficients (k and b) for each change interval. In a similar way, the membership function of T2 can also be obtained. Finally, the fuzzy membership function of motor temperature can be expressed as follows:

In the same way, the temperature status of FM and BM can be described as {Normal, Warning, Abnormal}. The corresponding membership intervals are (0, 2], (2, 4], and (4, +∝), respectively. The temperature status space of front motor can be marked as {FMTem_1, FMTem_2, FMTem_3} and the temperature status space of back motor can be marked as {BMTem_1, BMTem_2, BMTem_3}.
The running status of front motor and back motor can be obtained through the integration of current and temperature status. The status space of front motor and back motor can be established as {Normal, Warning, Abnormal}, marked as {FM_1, FM_2, FM_3} and {BM_1, BM_2, BM_3}. The expert knowledge base of scraper conveyor motor can be established through fuzzy logic reasoning, which is composed of 24 fuzzy rules and can be expressed as follows:
Rule 1:
Rule 2:
Rule 3:
Rule 4:
Rule 5:
Rule 6:
⋮
Rule 24:
where FMCur and BMCur denote the current status of front motor and back motor and FMTem and BMTem denote the temperature status of front motor and back motor.
The working status of scraper conveyor can be evaluated through the running status of front motor and back motor. According to the actual situation, the status space of scraper conveyor (SC) can be established as {Normal, Warning, Abnormal}, which can be marked as {SC_N, SC_W, SC_A}. The expert knowledge base of scraper conveyor is composed of 9 fuzzy rules and can be expressed as follows:
Rule 1:
Rule 2:
Rule 3:
Rule 4:
Rule 5:
Rule 6:
Rule 7:
Rule 8:
Rule 9:
4.3. Status Recognition through Probabilistic Neural Network
Probabilistic neural network (PNN) is a kind of function approximation method based on Bayesian decision theory. On the basis of RBF neural network, PNN combines the density function estimation theory and gradually approximates the Bayesian optimal decision surface to achieve the pattern classification eventually. Taking two kinds of classifications as an example, the prior probability of event 1 (c1) and event 2 (c2) is assumed as p(c1) and p(c2), respectively, and p(c1) + p(c2) = 1. For a given vector

where
When we make a decision for the classification, the risks and losses of classification error should also be considered. Thus, the classification rules should be optimized. The process of classifying vector
If the classification result is right, the loss is zero. Otherwise, the vector

Then, the optimized Bayesian decision rules can be described as follows:

where f i is the probability density function of class c i .
Probabilistic neural network is mainly composed of input layer, hidden layer, summation layer, and output layer. The typical structure can be shown as in Figure 5.

Structure of probabilistic neural network.
Input layer receives data from the outside and transfers the data to the hidden layer. The jth neuron output of the ith class can be calculated as follows:

where i = 1, 2, …, M, M is the total number of classes in the training sample, j = 1, 2, …, k i , k i is the neuron number of the ith class, d is the dimensions of the training sample, x ij is the jth data of the jth class training sample, and σ is the smoothing parameter.
The output of summation layer is the weighted average of Φ ij (x), which belongs to the same class:

where ϕ i is the output of the jth class. After the calculation of summation layer, the maximum in all ϕ i is selected as the output of output layer, which can be expressed as follows:

The training samples of PNN are the rules in expert knowledge base established in Subsection 4.2. The predicted values of Elman NN are fuzzed through fuzzy logic theory and are tested through the trained PNN. Then, the working status of monitoring object can be obtained.
4.4. The Cooperative Control Flow
The cooperative control of coal mining machines is a complex and dynamic process. According to the above description on expert knowledge base and neural networks, the dynamic cooperative control flow is designed as shown in Figure 6 and the main control processes can be expressed as follows.
Based on the main historical data of coal mining machines, the improved Elman neural network is applied to predict the running parameter of the next time.
An expert knowledge base is established through fuzzy logic, which provides the training samples for probabilistic neural network. According to the characteristics of different monitoring objects, the fuzzy membership function can be constructed, which is used to fuzz the Elman neural prediction results of scraper conveyor as the input of probabilistic neural network.
The working status of scraper conveyor can be evaluated through probabilistic neural network. Then, the expectation of shearer parameters can be calculated and is compared with the ENN prediction results of shearer. The difference of expectation and prediction is used to correct the running parameters of shearer and obtain the traction speed in the next time.
According to the traction speed of shearer in the next time, the action frequency of hydraulic support can be acquired and the pressure expectation of hydraulic support can be calculated, which is compared with the ENN prediction results. The difference is utilized to control the output of hydraulic pressure and meet the requirement of shear traction speed.
All parameters of coal mining machines are optimized through above control flow and the cooperative control process is generated finally.
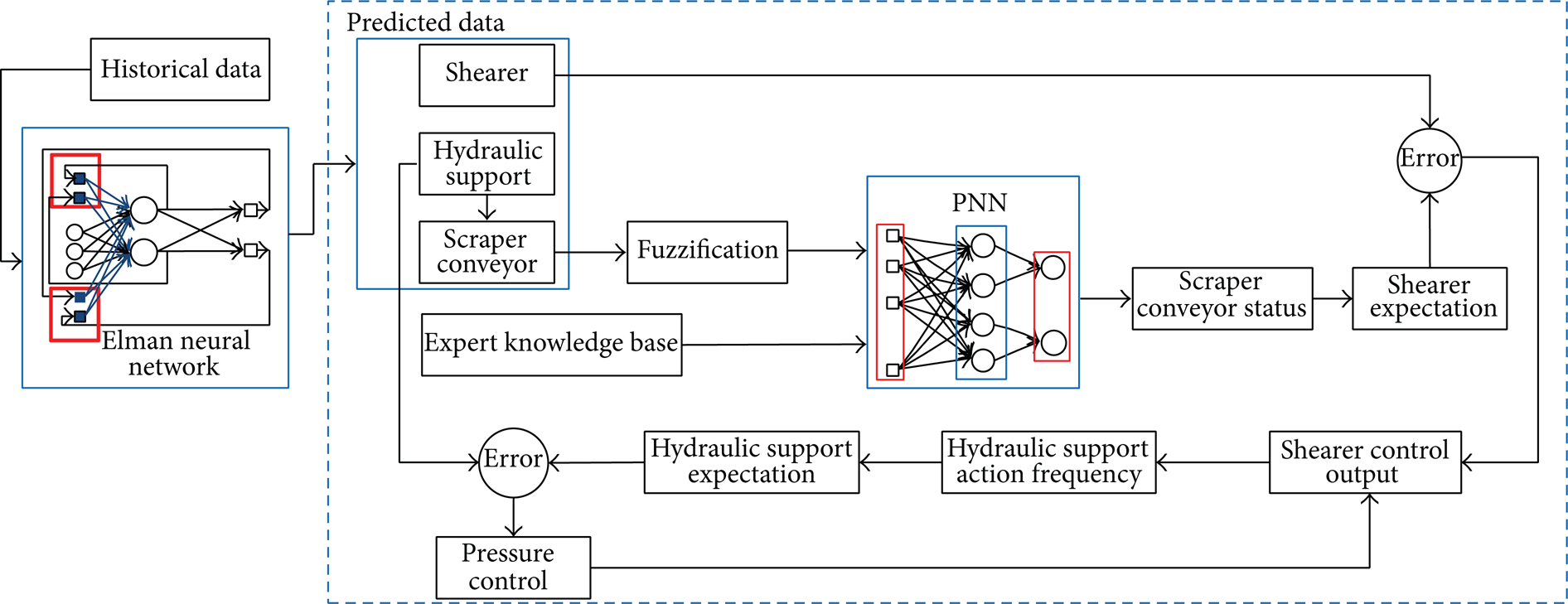
The dynamic cooperative control flow for coal mining machines.
5. Simulation Example
In this section, the cooperative control flow based on proposed method is used in the fully mechanized mining face. According to the rolling prediction method based on Elman neural network, the real-time system parameters are dynamically optimized. After the cooperative control operation as Subsection 4.4 described, the working parameters of coal mining machines are predicted in the next time and the cooperative prediction results are shown in Figure 7.

Rolling forecast results of the parameters.
In order to demonstrate the superiority of proposed cooperative control method to manual operation, a comparison and analysis are presented in this paper. The main historical parameter values of coal mining machines are collected and the comparison with cooperative control method is illustrated in Figure 8.

Contrast of prediction parameters and execution parameters.
In the process of the actual mining, the aim of the proposed cooperative control method for coal mining machines is to obtain optimal ratio of production to consumption. The ratio can be defined as an evaluation index Q s , which can be calculated as follows:

where H is the average height of shearer cutting the coal, B is the average thickness of shearer cutting the coal, v is the average velocity of shearer running, U i is the supply voltage of coal mining machines, and I i is the running current of coal mining machines.
According to working parameters data in Figure 8, the coordination control results are compared with manual operation control results. The averages of corresponding parameters are described in Figure 9, where the abscissas “TS,” “LTC,” “RTC,” “LCC,” “RCC,” “HC,” “MHC,” and “MTC” denote “left traction current,” “right traction current,” “left cutting current,” “right cutting current,” “hydraulic consumption,” “motor head current,” and “motor tail current,” respectively.
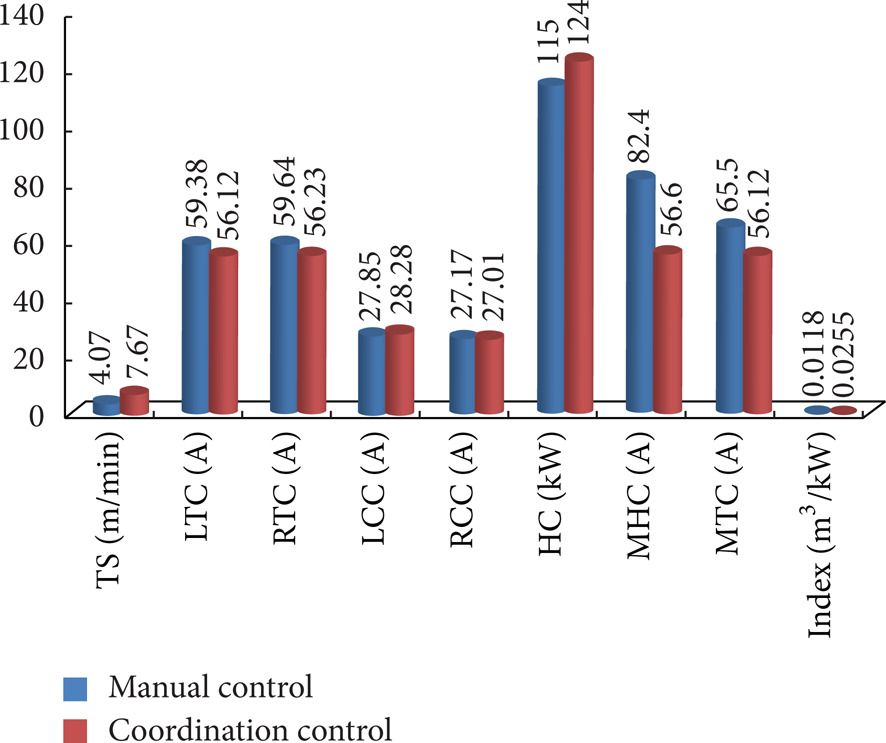
Comparison of manual control and coordination control.
As Figure 9 shows, almost all parameters of coordination control are lower than those of manual control except the LCC (left cutting current). The reason is that the left drum of shearer is used to cut the floor of coal mining face and the drum height is seldom adjusted. Furthermore, the evaluation index Q s of coordination control is about 0.0255 m3/kW, which is 2.16 times as that of manual control. The comparison results demonstrate the superiority of the proposed method to manual control method.
6. Conclusions and Future Works
In order to improve the control effect and coal mining efficiency of fully mechanized mining face, this paper proposed a cooperative control method based on fuzzy theory and neural networks. An improved Elman neural network was applied to predicting various parameters of coal mining machines and the expert knowledge base of scraper conveyor was established through fuzzy logic theory, which could provide the training samples for probabilistic neural network. Furthermore, the running status of scraper conveyor could be evaluated based on trained PNN and the cooperative control flow was designed and analyzed. Finally, a simulation example was carried out and the compared results indicated that the proposed method was outperforming manual control.
In future studies, the authors plan to perfect the cooperative control system based on proposed method. Possible improvements may include comprehensive analysis of the scraper conveyor working status and the formal rigorous stability proof of the proposed method.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
The support of The National Key Basic Research Program of China (973 Program): Key Fundamental Research on the Unmanned Mining Equipment in Deep Dangerous Coal Bed (2014CB046300), National High Technology Research and Development Program of China (no. 2013AA06A411), and Xuyi Mine Equipment and Materials R&D Center Innovation Fund Project (no. CXJJ201306) in carrying out this research is gratefully acknowledged.