
Abstract
We present a monitoring and tracking system for storage and transportation of chemicals. In accord with the standards and regulations of transport vehicles for hazardous chemicals, an overall structure-function diagram for vehicle monitoring and a pre-warning system were proposed by integrating various technologies such as computer modeling, control theory, multisensor data fusion, communication science, space positioning, and safety management science. Transportation experiments performed on sea and land demonstrated that the monitoring and tracking system is feasible with high precision, in which an amount of system state data was collected by different kinds of sensors group. Once sensor-derived signals were detected, the signals would be fused and transmitted to the master monitor center via a high precision and large-scale wireless communication network. The designed tracking and localizing system displayed good monitoring ability and adequately satisfied technical requirements.
1. Introduction
Hazardous chemicals such as crude oil, liquefied petroleum gas (LPG), liquefied natural gas (LNG), liquid chlorine, toluene, xylene, and other flammable or explosive chemicals are exported and imported over land/sea in tanks and through pipelines. These tanks and pipes can easily catch fire and explode depending on human factors and natural phenomena [1, 2]. On the basis of the DOW Fire & Explode Index Analysis Method (the Seventh Edition) and the practical safety management method of dangerous chemicals in enterprises, the safety management system for dangerous chemicals was put forward by the China Chemical Safety Transport Association.
Recently, with the rapid increase in the demand of chemicals, considerable research works focused on safety management system for monitoring and tracking hazardous chemicals to protect the environment and people's health. Santos et al. [3] have developed a web-based monitoring system integrated with sensor networks to manage the chemicals and hazardous waste in Ateneo de Manila University. The monitoring system is able to track individual chemical bottles and monitor storage state and it is suitable for static storage. Bartholmai and Neumann [4] have designed a remote-controlled system to measure gas concentration and locate the gas emission sources in hazardous scenarios. A research group from Lanzhou University in China [5] has presented a monitoring and tracking system based on SaaS (software as a service) for logistics vehicles in [5], which combines global positioning technology and wireless sensor networks to locate position and monitor state of vehicles motion. However, for storage and transportation of hazardous chemicals, the traditional monitoring and tracking system should be investigated further. Not only information of vehicles location and state of vehicles motion but also state of hazardous chemicals and storage environment should be fed back to the remote monitoring center in real time.
This paper provided a new method for the storage and transportation of hazardous chemicals. A network microsystem for real-time monitoring and tracking of hazardous chemicals leak detection was designed, which is based on technologies such as microelectromechanical systems (MEMS) sensors, integrated testing and control, wireless sensor networks, network communication, and information and data processing, to realize remote real-time monitoring and tracking of the entire process of production, storage, transportation, and usage of hazardous chemicals. The system includes source monitoring and tracking systems for both mobile and fixed hazardous chemicals. The system to track and monitor mobile sources of hazardous chemicals synthetically integrates various microsensors including those for MEMS pressure, level, acceleration, inclination, temperature, humidity, and gas leaks. In addition, in order to achieve a real-time monitoring system for tank containers and transport ships, a series of sensors, alarms, and electronic communication systems were designed for various security risks in the transportation of hazardous chemicals. To achieve real-time monitoring and tracking of hazardous chemicals throughout the entire course of transport, we used GPS/GPRS and satellite communications. The system monitors the main parameters of hazardous chemicals such as the medium state (pressure, level, temperature, etc.), the transport carrier state (collision, overturning, etc.), and the media (composition, leakage, grade, etc.). And the system includes the following main functions [6–8]:
remote real-time tracking, monitoring, and alarm for hazardous chemicals transportation; monitoring of hazardous chemical conditions including pressure, level, gas leak, and valve switch situation; monitoring status of hazardous chemical transportation carriers (land transport and maritime transport) including acceleration, velocity, space posture, location, environmental temperature, and environmental speed [9, 10]; local signal processing, early warning, remote data transmission, and real-time alarm for hazardous chemical transportation (travel and ship); central information processing and emergency information processing systems for tracking, monitoring, and management of hazardous chemical transportation; client data interface and client information system of monitoring and tracking hazardous chemical transportation.
This system should be installed and used in vehicles and ships, as well as other facilities of land and maritime transport of hazardous chemicals to ensure that chemicals are transported safely and reliably.
2. General Design Concept of the Monitoring and Tracking System
2.1. Comprehensive Model of Monitoring and Tracking System
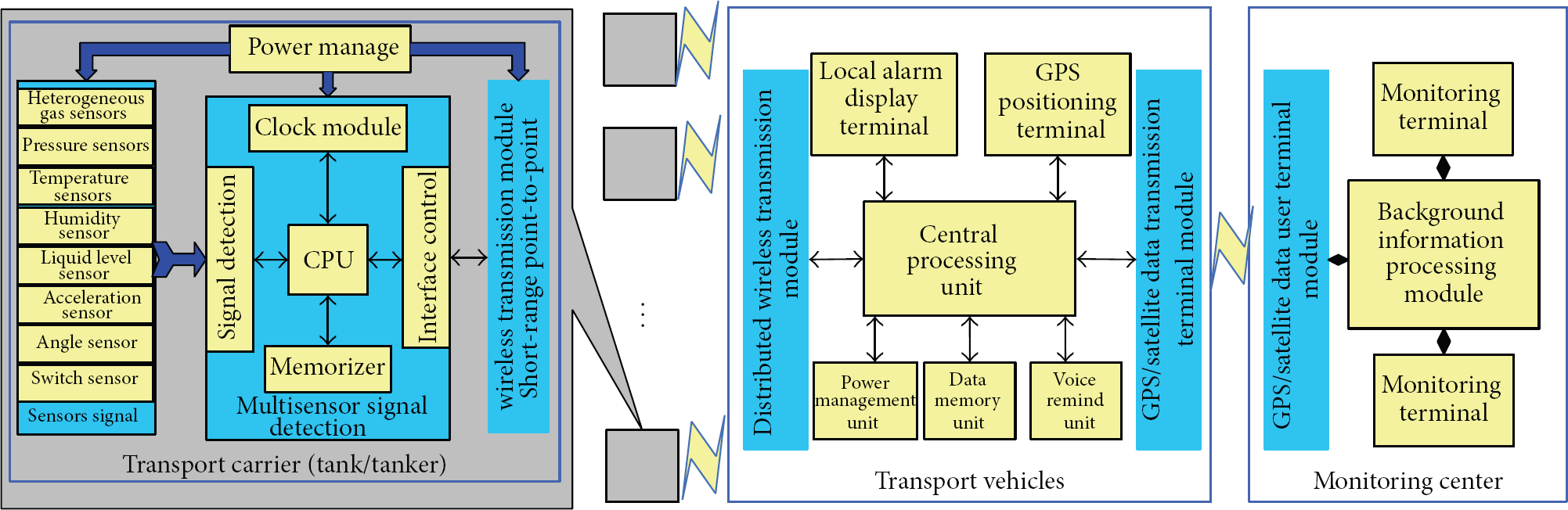
The terminal sensors' unit that integrated multisensors' signal detector is the key of the monitoring and tracking system, including various kinds of sensors (heterogeneous gas sensors, pressure sensors, temperature sensors, humidity sensors, liquid level sensors, acceleration sensors, angle sensors, and switch sensors), power management module, storage module, interface module, and communication module. The system state data was collected by the sensors. Once sensor-derived signals were detected, the signals would be processed by multisensors signal detector and then would be transmitted to central processing unit in the terminal control unit via interface module and communication module for initial judgment. The terminal control unit integrates GPS and GPRS module for positioning and wireless data communication with master monitor center [6, 11]. The terminal control unit also consists of configuration management module and database. In the top layer, the master monitor center takes all the system state data together for monitoring and tracking. The master monitor center, which functions as a superior level of management, makes the final decisions according to all of the data. Figure 1 shows a block diagram of the entire model of the monitoring and tracking system.

Monitoring and tracking system for transporting hazardous chemicals.
Among other features, Figure 2 shows the system architecture, database design, communication protocol design, and system functions. The states of hazardous chemicals and vehicles (e.g., collision, overturning, and overspeeding) can be monitored to achieve real-time locating, monitoring, and early notification. By alarming vehicles in advance, the monitoring center can effectively restrain accidents.
Schematic diagram of a monitoring and tracking system program for land and maritime transport.
The data transmission between the detection terminal of the transport carrier and data processing (DP) unit is installed in conveyance with point-to-point communication at a short distance (generally no more than 20 m) in land. So a short distance from the point-to-point wireless sensor module is integrated into the safety monitoring and tracking system for land transport. The requirements for the reliability of the system are higher because of the poor environment of land transport (see Figure 2).
Maritime hazardous chemicals ships embark dozens of transport carriers (tank containers) on every trip. The data transmission between the detection terminal at the transport carrier and DP unit installed in conveyance uses many-to-one communication at a long distance (generally more than 100 m) under a poor communication environment. The distributed wireless sensor module is integrated into the safety monitoring and tracking system for maritime transport. In view of the difference between land transport and sea transport, the system requirements for real-time detection and accuracy of the status of hazardous chemicals are higher. A technical solution for a network system of monitoring and tracking hazardous chemicals for maritime transport is shown below (see Figure 2).
2.2. Data Communication Network
To achieve remote real-time monitoring and tracking of hazardous chemicals throughout the entire process from production to storage and transportation, this system receives real-time GPS position information and sends it to the internet through the GPRS net [7]. With the GIS technique [12], the system realizes the management and monitoring of tankers at the master monitor center (MMC). The converter has GSM protocol interfaces and can send the control information and control center data to any terminal in the GSM network [8]. Likewise, remote data can be transmitted to the control center with the converter [13]. The central control system enables the system to operate automatically and continuously [14].
To deal with the possibility of a transportation problem, a monitoring and tracking system is designed. Figure 3 depicts the data communication network. This system monitors the state information, including state of chemicals and vehicles themselves. Furthermore, the system is able to handle some abrupt accident. The general design of the monitoring system consists of custom terminal, control center, data communication network, positioning system, and detector terminal.

Scheme for remote real-time monitoring of hazardous chemicals.
3. Sensor Network and Multisensor Data Association
3.1. Sensor Network
A sensor network—which integrates sensor, embedded, and wireless technologies—is a novel technique for acquiring and processing data. A number of technologies such as sensor, data collection, signal analysis, data processing, database, and net transmission technologies are included in cooperation with diagnostic methods. MEMS sensors were chosen for this project because of their small dimensions, low power consumption, and low cost. The project emphasizes solving technical problems such as MEMS sensor design, fabrication, reliability, signal treatment, and system integration. In this project, we have improved the application and production of MEMS sensors for acceleration, pressure, liquid, dip angle, LNG, and LPG [15, 16]. In addition, the research terms have developed a number of MEMS gas sensors such as for chlorine, aviation kerosene, gasoline, alkynes, alkenes, hydrocarbon, ammonia, ketene, alcohol, benzene, and glacial acetic acid. Input signals are provided by nine different kinds of sensors: gas to detect gas leakage, temperature and humidity for environmental detection and compensation, pressure to detect tank pressure, liquid level to detect the tank liquid level, acceleration to detect collisions of vehicles, smog to detect hazardous chemical combustion reactions, angle to detect the incline of tanks, and switch to detect the unlawful opening of covers. Figure 4 shows a photograph of heterogeneous gas sensors installed in the container.

Photograph of heterogeneous gas sensors installed in container.
3.2. Multisensor Fusion Scheme
Data communication channels pick up the data collected by the sensors and transmit them to the MMC by the network. In the process, error signals resulting in false alarms may appear with a certain probability [17]. One approach to solve this problem is presented under the assumption that the deviation in theory can be made prior to the execution of threshold functions and Kalman filters of the experiment, as opposed to being made while the experiment is in progress. This section provides a general description of the system (including the MDF) and discusses how to evaluate system performance. The optimal information fusion is decentralized, as shown in Figure 5.
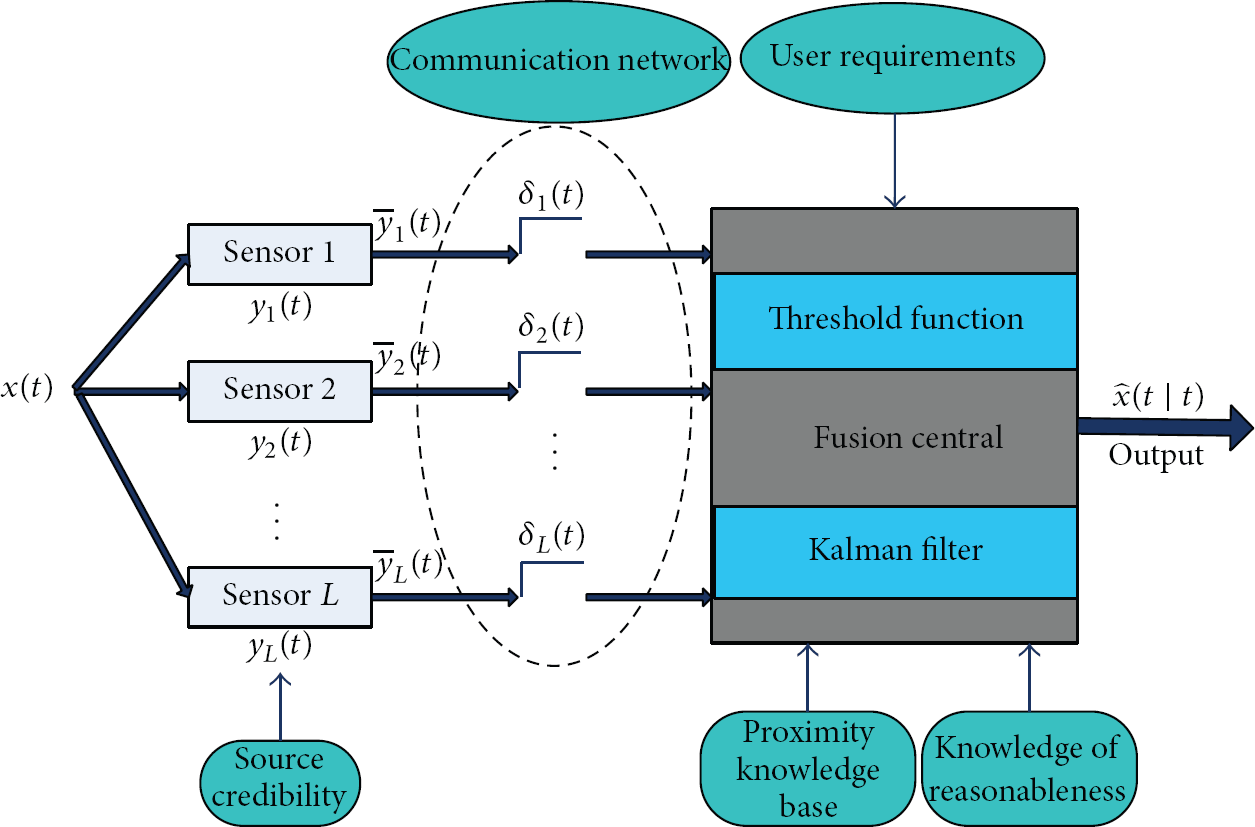
Multisensor fusion scheme.
Multisensor data fusion (MDF) [18, 19] is an emerging technology to fuse data measured and detected from multiple sensors to make a more accurate estimation of the environment. MDF is used in various areas [20], including those in military services (e.g., automatic target detection and tracking, battlefield surveillance, etc.) and those in civilian applications (e.g., environmental surveillance and monitoring, monitoring of complex machinery, medical diagnosis, smart buildings, food quality characterization, and even precision agriculture) [17, 21]. Techniques for data fusion come from a wide variety of disciplines including signal processing, pattern recognition, statistical estimation, artificial intelligence, and control theory. The rapid evolution of computers, proliferation of MEMS sensors, and maturation of data fusion technologies provide a basis for using data fusion in everyday applications. In our study, we mainly processed the collected sensor data fusion errors by setting a threshold function and using Kalman filters. The purpose of the threshold function was mainly to eliminate any obvious deviations in the data. The purpose of the Kalman filters was primarily to eliminate the channel correlation between data, frequent switching of network levels, and crosstalk under the main control module of the control state. A major aim of this study is to discuss approaches and strategies for structuring denoising methods. The optimum threshold function can be made more reliable, as shown in Figure 6.

Threshold function for denoising.
Consider the time-invariant linear discrete system [17] as follows:



Assume that
The local optimal Kalman predictor


The information fusion Kalman filter

Firstly, the mutual supportability of multiple sensors is gained from the correlation function. The reliability of information provided by each sensor is then obtained by the membership function. Finally, the supposed fusion result of the state recognition from the multiple sensors could be produced on the basis of the fuzzy integration function.
4. System Testing and Experimental Results
4.1. Novel Simulation of Parallel Structure Motion
Analog simulations are first used for designing the overall scheme. Subsequently, they are used to conduct unit technology research and development and, finally, to complete systems integration and experimental validation of the technical process. Depending on the characteristics of the transport vehicles, statistical studies commonly use the parameters for an LPG transport vehicle. In view of a typical tank and tank truck, we establish corresponding parametric 3D digital model, which is based on the kinematics and dynamics of the model, researching vehicles running on the road, the potholes ramp corner, the emergency brake and braking in the curve under different conditions with different speeds, and analyzing the dynamic response parameters, including acceleration curve, amplitude, and vibration frequency.
In order to test the reliability of the monitoring and tracking system, experimental simulation was performed on sea and land. The chemical container assembled various kinds of sensors and water was injected into chemical container to take the place of hazardous chemicals. Different gas cylinders were located in the vehicle to simulate gas leak in the transportation (see Figure 7). The principal experimental route of transportation performed on land started in Zhangjiagang, Jiangsu Province, and arrived at Shanghai along the bank of Changjiang River. Then, the following experiment on sea started in Shanghai and reached Huangpu dock, Guangzhou Province through East China Sea, Taiwan Strait, and South China Sea.

Experimental routes on land and sea.
From the analysis and summarization of unpleasant accidents, we found that the choice of road condition for dangerous goods transportation played an important role in land transport. During the course of the experiment, we focused on testing steep sections, potholes, brakes, sharp turns, high speed, and land transport factors while assessing the effect of bad weather on transport. During tests at sea, we focused on validating ocean waves, typhoons, and other factors.
4.2. True Effect of Monitoring
An enormous amount of data was collected from observations of a high precision and large-scale communication network. In order to obtain high-quality results, we chose gas concentration as an important factor. Analyses of the experimental data demonstrate that the general design is achievable and that the system is able to effectively monitor and track the chemicals and vehicles. Experimental data for land and sea routes with two leaks are shown in Figures 8 and 9, respectively.

Simulated test for transport of ethylene gas (left) and dimethyl ether gas (right) on land.
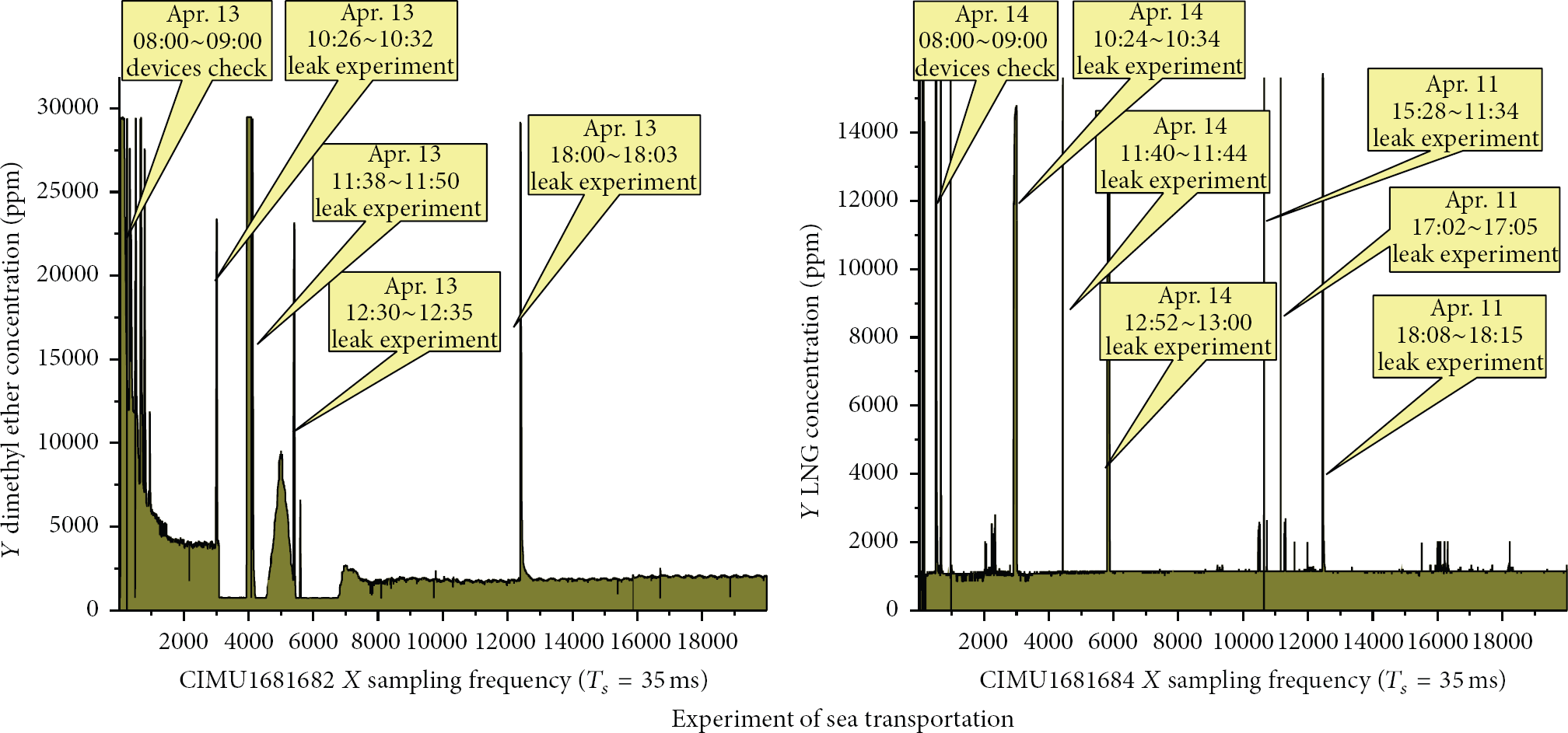
Simulated test for transport of dimethyl ether gas (left) and LNG (right) at sea.
5. Conclusions
In this paper, the real-time monitoring system for tracking and positioning hazardous chemicals is present. And it is versatile and useful for hazardous chemicals transportation. Through an experimental simulation performed on sea and land, the experimental data demonstrated that the monitoring and tracking system is perfect with fine monitoring ability and adequately met technical requirements. With continued and penetrating studies, the system holds significant promise for the future and may become widely applied in the field of containers and carrier vehicles for hazardous chemicals. Therefore, the monitoring and tracking system can be widely applied in monitoring and tracking hazardous chemicals and can protect lives and property from danger.
Footnotes
Conflict of Interests
The authors declare that there are no conflicts of interests regarding the publication of this paper.
Acknowledgments
The authors thank the Fund Committee of the National Project (863), which is supported by the Chinese National Programs for High Technology Research and Development, the Innovation Group of Shanxi Province, and Shanxi Province Outstanding Researcher. Additionally, they would like to express their gratitude to the International Marine Containers (Group) Ltd. (CIMC) for their support and help with the experiment. This work was supported in part by the National Natural Science Foundation of China (Grant nos. 61335008 and 51205373), the Program for the Outstanding Innovative Teams of Higher Learning Institutions of Shanxi, and the Shanxi Natural Science Foundation (Grant no. 2012021013-4).