
Abstract
A two-step tracking strategy is proposed to mitigate the adverse effect of non-line-of-sight (NLOS) propagation to the mobile node tracking. This strategy firstly uses support vector regressors ensemble (SVRM) to establish the mapping of node position to radio parameters by supervising learning. Then by modelling the noise as the adversary of position estimator, a game between position estimator and noise is constructed. After that the position estimation from SVRM is smoothed by game theory. Simulations show that the proposed strategy results in the more accurate performance, especially in the harsh environment.
1. Introduction
The location service is foundation of pervasive computing, intelligent transportation, and application of WSN, so the mobile location technologies have drawn a lot of attention [1, 2]. Existing range-based location techniques include ToA, TDoA, and RSSI. For range-based location techniques, if the line-of-sight (LOS) propagation exists between the mobile node and anchor nodes, high location accuracy can usually be achieved using the conventional location algorithms [3]. However, since the direct path from the mobile node to anchor nodes can be blocked by buildings and other obstacles, the transmitted signal could only reach the receiver through reflected, diffracted, or scattered paths called non-line-of-sight (NLOS) paths. The NLOS propagation generally leads to a positive bias in the estimation range and causes a serious error in the mobile location estimation.
Nowadays many methods have been employed to mitigate the adverse effect of NLOS propagation. References [4, 5] have summarized the methods for static position systems. However, these methods are not effective for mobility tracking systems. Recently, the Kalman filtering, unscented Kalman filtering, and particle filter techniques are applied for range measurements smoothing and NLOS error mitigation [6–8]. The EKF-based algorithms are suggested in [9] as a promising alternative to range measurement for smoothing and mitigating NLOS error. A Kalman-based IMM smoother [10] is proposed to estimate the range between the mobile node and the corresponding anchor nodes in the mixed LOS/NLOS conditions. The method in [11] proposed a one-order hidden Markov chain to simultaneously model the transition of the LOS/NLOS condition and the mobile node position.
Although the above algorithms mitigate the influence from the NLOS errors and improve the location accuracy to a certain extent, they always need to use ToA, TDoA, and RSSI to range, so it is hard to overcome the side effect from non-line-of-sight propagation. In order to further mitigate the position tracking error incurred by non-line-of-sight propagation, [12] dealt with mobile position tracking with support vector regression and game theory. To extend the above mobile tracking scheme, this paper uses support vector regressors ensemble (SVRM) to establish the map from radio parameters to node position by supervising learning. Then the position estimation from SVRM model is smoothed by the game theory.
Because the radio parameter is not considered as the distance measure, but as the feature to train the SVRM model, the side effect of non-line-of-sight is efficiently mitigated. Moreover, because of its ability to handle the uncertain and unmodeled noise, game theory can attain theoretically more accuracy of mobile tracking compared to Kalman-filter which can only deal with the Gaussian noise.
The paper is organized as follows. Learning the map from radio parameters to node position to obtain the support vector regressors ensemble is discussed in Section 2. In Section 3, the node tracking is implemented by game theory. The simulation results are given in Section 4, and the paper is concluded in Section 5.
2. Position Estimation with Support Vector Regressors Ensemble
2.1. Position Estimation with Support Vector Regressor
Given training set,
The position estimation of mobile node is to learn the regression function from radio parameters to coordinates by supervising learning. After that, if we get the radio parameter taken by location-unknown node, we can calculate its coordinates by inputting its radio parameter into this function. Usually the regression is nonlinear, so to estimate the nonlinear function between the radio feature and node coordinates, we map the data



By Lagrange multiplier technique, the objective function (2) can be expressed, after using the slack variables, as follows:



Using (6), (1) can be expressed as

After solving the optimization problem (4) and calculating the b as described above, the output p that denotes the coordinates of the mobile node, corresponding to the new measurement
2.2. Constructing Support Vector Regressors Ensemble
To further improve the position estimation, support vector regressors ensemble is constructed by bagging. Bagging [13] is a meta-algorithm to improve classification and regression models in terms of stability and classification accuracy.
The ensemble is made of regressors built on a bootstrap sample of the training set [14]. A bootstrap sample is generated by uniformly sampling
Algorithm 1 (the bagging algorithm).
Input
A training set one-against-one support vector regressor; integer T specifying the number of iteration; integer
Trainin Phase
For take a bootstrap sample train support vector regressor with add
Output. For a testing set z,
Algorithm 2 (resampling subroutine).
Input. Weight vector
Resampling Process
Set the data index set Normalize Generate the uniformly distributed random
For
If max is empty,
Output.
For a given bootstrap sample, an instance in the training set has probability
3. Mobile Tracking Based on Game Theory
To implement mobile node tracking, we need to smooth the node position estimate in Section 2, that is, to filter the position estimation noise. Because noise characteristics are unknown and uncertain, it is unreasonable to utilize the Kalman filter to smooth the position estimate. So we utilize the game theory to address this problem. In this scheme, we assume that the noise is the adversary of the estimator.
Assume that the mobile node measures the radio parameters at each interval

Let

Then the mobile tracking problem is to find an estimate

Suppose
The estimation error is defined as follows:

It can be shown from the preceding equations that the dynamic system describing the evolution of the estimation error is given as follows:

However, this is an inappropriate term for a minimax problem because the adversary can arbitrarily increase


From the above analysis, we can see that the estimator minimizes the objective function by searching
For this game, we define the objective functions as

According the difference game theory, the optimal solution to the objective function (16) is the saddle point

For brevity, we rewrite the objective function and define the matrix

Define the following matrix difference equation:
Then the objective function is reformulated as follows:

Now define

And if solutions to these equations do exist, then

Theorem 3 (see [15]).
If
In brief, the implementation of mobile tracking is shown as follows:
equation system
initialization
at each step
Choose the parameter Calculate the following equations:
If



4. Simulation Results
In the simulations, support vector regression is implemented by using MATLAB Support Vector Machine Toolbox. A 600 m
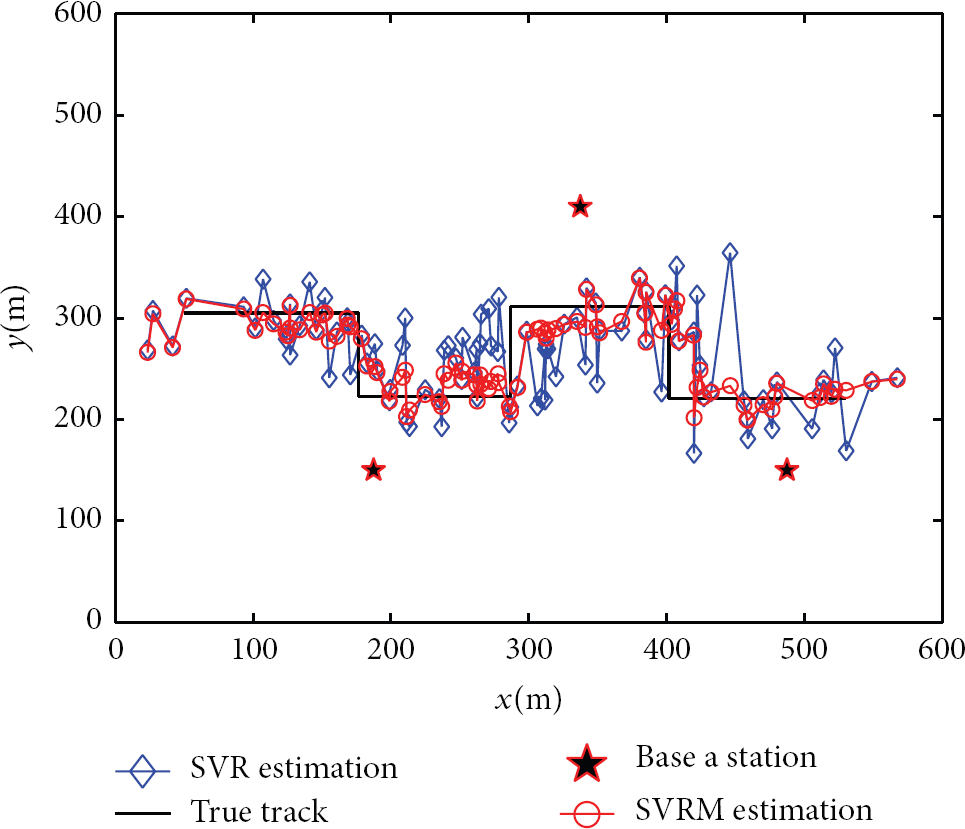
True track and the SVR and SVRM estimate.
In experiment, we use elliptical scatter model [16] to produce the ToA data. For the elliptical scatter model, elliptical scatters are uniformly distributed inside the ellipse with foci at the base station and mobile. The ToA probability density function is given by the following function:
This TOA distribution is used in the simulation by equating
For the SVR and SVRM model, the radial basis function is used as the kernel and the ε-insensitive cost function with
In the first set of simulations, the mobile is tracked in the solid line shown in Figure 1. The location estimates obtained by the SVR and SVRM are also shown in Figure 1 with
The smoothing results from the Kalman filter and game theory, which take the SVR and SVRM estimates as inputs, are presented in Figure 2. From these two figures, the effect of Kalman filter and game theory is seen clearly. The average error between the true locations and the estimated locations is 40.77 m for the SVR estimates, which improves to 37.32 m after Kalman filtering and further improves to 28.08 m after smoothing by game theory [12]. But the average error between the true locations and the estimated locations is 30.58 m for the SVRM estimates and further improves to 23.08 m after smoothing by game theory. This shows that the position estimate from SVRM is better than that from SVR.

Position estimate after smoothing by Kalman filter and game.
In Figure 3, the average errors after smoothing by Kalman and game theory are plotted for different values of α (from 1.5 to 2.5) with

Average tracking error versus α.
5. Conclusion
In this paper, we utilize SVRM to learning the map from radio parameter to node position and game theory to smooth the SVRM output. Because the radio parameter is not considered as the distance measure, but as the feature to train the SVRM model, the side effect of non-line-of-sight is mitigated. And by modeling the noise as the adversary of position estimator, because of its ability to handle the uncertain and unmodeled noise, game theory can attain more accuracy of mobile tracking compared to Kalman filter. The above method can yield very accurate position estimates even in NLOS environments and attain better performance than the method in [12]. From the simulations, it can be seen that SVRM can reduce the effect of NLOS.
Footnotes
Conflict of Interests
The authors declare that they have no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported in part by the National Natural Science Foundation of China under Grants (nos. 61370096 and 61173012), the Key Project of Natural Science Foundation of Hunan Province under Grant (no. 12JJA005), and technology project of Hunan Province (no. 2013GK3023).