
Abstract
To research the dynamic characteristics of the joint surfaces from the microperspective, the fractal prediction model of the normal contact damping of joint surfaces is established based on the “solid-gap-solid” contact model which was proposed by the author, tribology theory, and contact fractal theory. And the kinetic model of joint surfaces is improved to a certain extent. The influences of actual contacting area, friction coefficient, and the fractal dimension on the normal contact damping are revealed by the research of numerical simulation. Simulation results show that the normal contact damping of joint surfaces decreases to a constant value with the increase of actual contacting area, increases with the increase of friction coefficient, and decreases with the increase of fractal dimension. Actual contacting area influences the location of the turning point of the C n *-μ (critical friction coefficient), and the critical friction coefficient increases with the increase of actual contacting area. Normal damping coefficient of joint surfaces continuously decreases with the increase of fractal dimension and the difference of magnitude exists between normal contact damping coefficients with different fractal dimension values.
1. Introduction
Between the mechanical parts, the formed binding site by assembling is called joint surface, which plays an important role in transferring movement, load, and energy in the normal operation of the mechanical system. For example, in CNC machine tools, studies have shown that joint surfaces’ dynamic characteristics affect the stiffness, damping, machining accuracy, and stability. And joint surfaces’ friction in process brings great difficulties to the machine's overall dynamics modeling. Therefore, studies on dynamic characteristics of joint surfaces have great significance in theory and practical applications [1].
For a long time, many scholars at home and abroad have carried out a lot of studies [2–4]. Dynamics model of joint surfaces was built by Zhou and Sun [5] as a spring-damper mechanical model from the aspects of macro. Based on the fractal theory, the fractal model of normal dynamic parameters of joint surfaces was built by You and Chen [6] from the aspects of microscopic, which revealed the complex relationships between contact stiffness, contact damping and normal load, constant of material property, and fractal dimension. Virtual material model which is based on fractal contact model and strain energy equivalence principle was built by Tian et al. [7] from the perspective of the combination of the macro and micro, and the model was proved to be effective in experiments. But because of the complexity of contact parameters, the studies above are seldom considering the effect of friction. And actually, friction and gap between joint surfaces have nonlinear vibration characteristics, which can change the topology mechanisms of dynamic systems and cause the problems of vibration and noise. Therefore, considering the effect of friction in the process of the joint surfaces’ analysis and fractal contact model is urgently needed [8].
Based on the “solid-gap-solid” contact model of joint surfaces which was proposed by the author [8], the fractal prediction model of normal contact damping of joint surfaces considering friction factor is built from the aspects of microscopic, and the influences of relevant parameters on the normal damping are revealed by numerical simulation. Then the fractal prediction model of dynamics parameters of joint surfaces is improved to some extent.
2. Fractal Prediction Model of Normal Contact Damping
The fractal prediction model of normal contact damping which considers the impact of friction is deduced. It is based on the “solid-gap-solid” contact model, friction theory, and fractal contact theory.
The most basic theory of contact surfaces is Hertz theory, and other fractal models are established on the base of it. The section of the static contact deformation of two elastomers in Hertz theory is shown in Figure 1.

The section of the static contact deformation of two elastomers.
Mathematical model [9] of the surfaces outline of the undeformed microbulge is expressed as follows:

When x = 0 in (1), the contact deforming value of micro-bulge can be expressed as (2)

From Figure 1, R2 = (R – δ)2 + r2, R ≫ δ, and R can be expressed as follows:
From (2) and (3), the curvature radius of microbulge can also be got as follows:

Based on Hertz theory, elastic deformation value can be expressed as follows:

From [9] and other references, in addition, the relationship between the largest combination area (a max ) and the distribution of the contact points (n(a)) is

where ψ is the fractal regional extended coefficient, which is related to fractal dimension D.
From [10, 11], when the relative sliding occurred in the joint interfaces, the critical average contact pressure of microbulge is

where kμ is the friction coefficient correction factor;

Based on (5) and (7), when the relative sliding produced in the joint interfaces, the influence of surface friction on the critical deformation between the elastic and plastic state of microbulge must be considered. And it can be expressed as follows:

Based on (2), (4), and (9), the critical area between the elastic and plastic state of microbulge can be obtained and expressed as

When the elastic strain of single microbulge happened, the relationship between load and contact deformation value [12] can be obtained as follows:

where E = [(1-v12)/E1 + (1-v22)/E2]−1 is equivalent elastic modulus, E1, E2 is two materials’ elastic modulus in Figure 1, v1, v2 is two materials’ poisson ratio.
The stored elastic potential energy can be obtained as in (12) through integrating (11):

Based on (6) and (12), the stored elastic potential energy on an entire contact process can be obtained as

Similarly, the stored plastic strain energy can also be obtained as follows:
where K is the correlation coefficient between hardness H and yield strength σ y ; the three satisfy H = Kσ y [13].
When a max = aμc, (14) can be simplified as follows:

Damping factor η is a kind of parameter which can be used to describe structure or damping properties of materials. It is equal to the ratio of the dissipative energy and the storage of strain in a movement cycle:

Normal damping coefficient of joint surfaces is
where C c * is the dimensionless critical damping coefficient of joint surfaces obtained by vibration tests [14].
Obviously, (17) includes morphology of fractal dimension of joint surfaces D, fractal size parameter G, friction factor μ, and maximum single-point contact area a max . That is to say, it accords with the starting point of the “solid-gap-solid” contact model of joint surfaces. So it is feasible.
3. Numerical Simulation Analysis of Fractal Prediction Model
3.1. Relationship between Normal Damping Coefficient and Actual Contacting Area
The relationship between the dimensionless actual contacting area and the maximal contacting area of single-point can be expressed [9] as follows:

Based on (17)–(18) and relevant references, the relationship between normal damping coefficient and actual contacting area can be obtained in different friction factors μ (μ = 0.02, 0.25, 0.35, 0.40, 0.50) when G = 1.36 × 10−9, K = 2.8, dimensionless parameter σ y /E = 0.005, and fractal dimension D = 1.45; correspondingly, ψ = 2.041 can be got from the table on the base of D [7]. The result is shown in Figure 2.

The relation curve between normal damping coefficient and real contact area in different friction factors.
From Figure 2, when fractal dimension D = 1.45, firstly, normal damping coefficient of joint surfaces C n * decreases with the increase of actual contacting area A r . This is mainly because the elastic deformation will occur on the joint surfaces when maximal contacting area is more than critical contacting area. Then the elastic potential energy increases and the proportion of plastic deformation decreases correspondingly. Secondly, when actual contacting area A r is greater than a certain value, normal damping coefficient of joint surfaces C n * is tending towards a stable value. Therefore, we can consider that continuing to increase normal load will not be effective in decreasing normal damping when actual contacting area A r reaches a stable value.
3.2. Relationship between Normal Damping Coefficient and Fraction Factor
Based on (17) and (18), assuming μ is variable, other parameters are invariable; the relation curve between normal damping coefficient and friction factor can be obtained in different actual contacting area when A r = 0.0026, 0.0323, 0.0653, 0.09, 0.1114, and the results are shown in Figure 3.
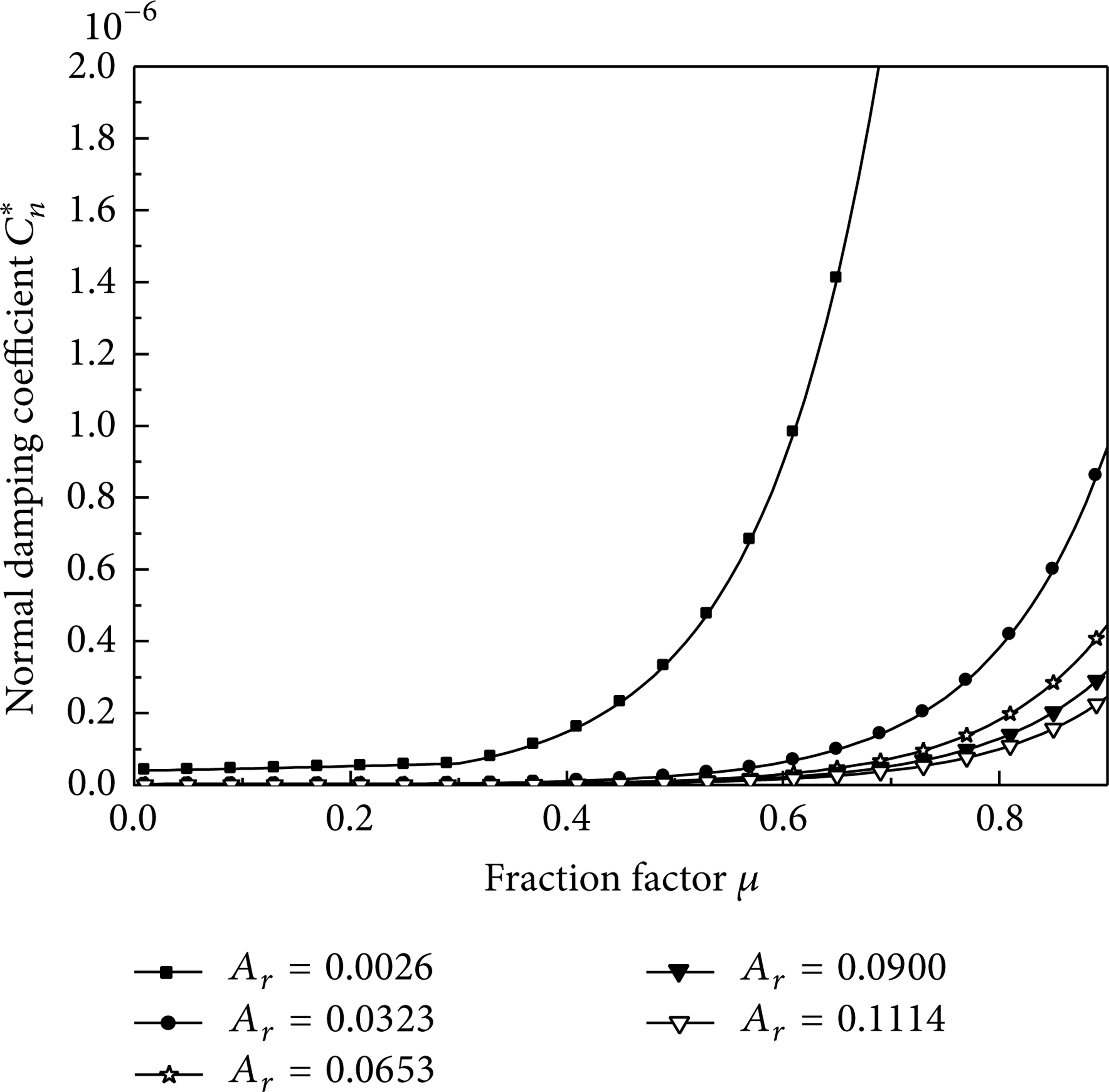
The relation curve between normal damping coefficient and friction factor in different actual contacting area.
It can be concluded from Figure 3 that normal damping coefficient of joint surfaces C n * increases with the increase of friction factor μ. When actual contacting area A r = 0.0026, and fraction factor μ>0.4, normal damping coefficient of joint surfaces C n * just begins to increase, and the trend becomes more and more quickly; when actual contacting area A r = 0.1114, and just only fraction factor μ>0.6, normal damping coefficient of joint surfaces C n * just begins to increase, and the trend becomes more and more obvious. That is to say, actually contacting area A r affects the location of turning point (critical friction factor) of C n *-μ curve. And the critical friction factor increases with the increase of actual contacting area.
Therefore, when actual contacting area of joint surfaces is lesser, the better damping capacity can be obtained by changing the friction factor of joint surfaces; when actual contacting area of joint surfaces is larger, the better damping capacity can be obtained only when the joint surfaces is in greater friction area.
3.3. Relationship between Normal Damping Coefficient and Fractal Dimension
Based on (17) and (18), the relation curve between normal damping coefficient and actual contacting area can be obtained in different fractal dimension D by numerical simulation, and the results are shown in Figure 4. Values of ψ (ψ = 2.094, 2.067, 2.041, 2.017, 1.985) can be checked by [9] in different values of D (D = 1.39, 1.42, 1.45, 1.48, 1.52).

The relation curve between normal damping coefficient and actual contacting area in different fractal dimension.
From Figure 4, normal damping coefficient of joint surfaces C n * continuously decreases with the increase of fractal dimension D. And values of normal damping coefficient in Figure 4(a) and Figure 4(b) exhibit magnitude differences. Therefore, it is possible to reduce normal damping capacity of joint surfaces under this circumstance without changing load by increasing fractal dimension of joint surfaces.
4. Conclusions
Normal damping coefficient of joint surfaces continuously decreases with the increase of actual contacting area, when actual contacting area A r is greater than a certain value; normal damping coefficient of joint surfaces C n * is tending towards a stable value. Therefore, we can consider that continuing to increase normal load will have no effect on decreasing normal damping when actual contacting area A r reaches a stable value.
Normal damping coefficient of joint surfaces C n * increases with the increase of friction factor μ; actually contacting area A r affects the location of turning point (critical friction factor) of C n *-μ curve. And the critical friction factor increases with the increase of actual contacting area.
Normal damping coefficient of joint surfaces C n * continuously decreases with the increase of fractal dimension D and the difference of magnitude exists between normal contact damping coefficients with different fractal dimension values. Therefore, it is possible to reduce normal damping capacity of joint surfaces under this circumstance without changing load by increasing fractal dimension of joint surfaces.
Footnotes
Nomenclature
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research is supported by the National Natural Science Foundation (51275079), Program for New Century Excellent Talents in University (NCET-10-0301), and Fundamental Research Funds for the Central Universities (N110403009).