
Abstract
The long propagation delay and low data rate characteristics of acoustic communication attach many challenges to underwater wireless sensor networks. In this paper, a TDMA based underwater acoustic channel access method (UA-MAC) is proposed mainly to improve channel utilization in dense mobile underwater wireless sensor networks (MUWSN). In UA-MAC, the time slot of each node accessing to the acoustic channel is assigned according to a preverified template, which aims to minimize amount of slots so as to decrease the end-to-end delay. In addition, a piggyback based protocol is implemented to synchronize and schedule the network. The simulation results show that UA-MAC is much superior to common TDMA in throughput, channel utilization, and end-to-end delay especially in dense scenario. Based on the low-power low-cost underwater acoustic nodes we developed, the experiments were carried out to validate the proposed UA-MAC.
1. Introduction
Underwater sensor networks have a broad range of applications, such as ocean sampling networks, environment monitoring, offshore explorations, disaster prevention, assisted navigation, and mine reconnaissance [1, 2]. Underwater sensor networks are easy to deploy and eliminate the need of cables, and they do not interfere with shipping activity. Underwater communication system combined with new sensors, actuators, and signal processing techniques can be applied to antisubmarine warfare (ASW), torpedo defense (TD), and mine countermeasures (MCM) operations. Environmental applications include monitoring of physical indicators (such as salinity, pressure, and temperature) and chemical/biological indicators (such as bacteria levels, contaminant levels, and dangerous chemical or biological agent levels in reservoirs and aqueducts) [3].
Presently, kinds of unmanned underwater vehicles (UUVs) have been developed, such as robot fish [4] and robot dolphin [5], which can traverse under water to sample information and build a powerful network. The architecture based on UUVs makes the UWSN more flexible and reliable [6], and those are the so-called mobile underwater wireless sensor networks. Nevertheless, such smart biorobots raise the small-size and light requirement of acoustic modem.
Underwater acoustic modem has made much progress in power efficiency, bit rate, and propagation length. In [7, 8], some low-cost and small-size solutions of underwater acoustic modem were given, which make it possible to construct dense and large underwater sensor networks. In [7], an underwater sensor network was proposed, which consists of static and mobile nodes. The mobile nodes take charge of locating and hovering above the static nodes for data muling, and they can maintain the network, such as deployment, relocation, and recovery.
Nevertheless, In MUWSN, a lot of challenges confront us in achieving this goal, such as low-power and low-cost sensor node, node disposal and retrial, and power supply [1, 6–8], some feathers and challenges are summarized as below.
Smart nodes with good performance of mobility and stillness, which is helpful to maintain a reliable acoustic link. Nodes mobility makes it possible to build a flexible and reliable UWSN, while some measures are necessary to configure a dynamic and scalable network. Node density should retain a stable level. Though the number of nodes in some area maybe a large one, but the number of intercommunicated nodes is limited for decreasing the interference and improving the network efficiency, which is not difficult to practice for mobile nodes. A reliable acoustic modem and intelligent network protocols are important and necessary. The acoustic modem should be low cost, low power, and small, so as to apply to MUWSNs involving hundreds of smart nodes.
The shift from RF to acoustics changes the physics of communication from the speed of light (3 × 108 m/s) to the speed of sound (around 1.5 × 103 m/s)—a difference of five orders of magnitude. Some limitations of the acoustic signals, such as low speed and long propagation delay, have profound effects on underwater wireless networks. Due to the significant difference between UWSNs and Terrestrial Wireless Sensor Networks (TWSNs) imposed by underwater communication channels and acoustic modems, most protocols and research conclusions dedicated to TWSNs cannot be directly applied to UWSNs. To date, significant efforts have been devoted to underwater MAC protocol design to overcome the adverse effects incurred by the harsh underwater environments [9]. Compared with Frequency Division Multiple Access (FDMA), Code Division Multiple Access (CDMA), and some contention based medium access method, TDMA based channel access method has good performance of energy saving and collision-freedom, which are more suitable for underwater acoustic channel [10–16].
In this paper, a TDMA based underwater acoustic MAC protocol called UA-MAC is presented, which is a template based channel assignment scheme. In the design and implementation of UA-MAC, power efficiency and network configuration efficiency are focused on. And better performances of network scalability and collision avoidance are achieved by utilizing a scheme combining scheduling and contention.
The rest of this paper is organized as below. In Section 2, the related work is summarized. The design and implementation of UA-MAC are elaborated in Sections 3 and 4, respectively. Some simulation and experiments are discussed in Section 5. We conclude the paper in Section 6.
2. Related Work
MAC protocols in MUWSN remain a largely open problem because of its requirements of low complexity, good scalability and high efficiency. Limited bandwidth and long propagation delay pose additional challenges to achieve real-time channel access in MUWSN.
The sensor-MAC (S-MAC) protocol [17] improves the existing 802.11 distributed coordinated function (DCF). Based on S-MAC, literatures [18, 19] proposed fast path schemes that leverage upper-level topology information to allow fast routing and bypass the delay associated with the length of the sleep-listen cycle.
Because of hidden terminals, the random access based approach cannot effectively avoid collisions, and some studies have explored the handshake based MAC with contention. In order to improve the energy efficiency of FAMA [20], which is designed for long propagation delay characterized networks, Slotted-FAMA [21] is proposed. In Slotted-FAMA, time is slotted and any packet can only be transmitted at the beginning of a slot.
In [22], Z-MAC combines the advantages of TDMA and CSMA while overcoming their weaknesses and can dynamically adjust the behavior of MAC between CSMA and TDMA depending on the level of contention in the network. A distinguished feature of Z-MAC is that its performance is robust to synchronization errors, slot assignment failures, and time-varying channel conditions. The protocol uses the knowledge of topology and loosely synchronized clocks as hints to improve MAC performance under high contention. When these hints are unreliable and the channel contention is low, the protocol behaves like CSMA. Z-MAC is useful for applications where expected data rates and two-hop contention are medium to high. The problem with the application of all of these terrestrial protocols to underwater acoustic networks is their assumption that the propagation delay between the nodes is very small [11].
In past acoustic network deployments, frequency-division multiple access (FDMA) was used, for example, in the 1998-1999 SeaWeb [23, 24], but bandwidth utilization was found to be restrictive and inefficient. SeaWeb 2000 [25] combined a carrier sense multiple access/collision avoidance (CSMA/CA) solution with ready-to-send/clear-to-send (RTS/CTS) exchange. Some of these proposals also incorporate power control and ARQ (Automatic Repeat reQuest) techniques to improve their reliability and performance. However, the problem with the application of handshaking protocols to underwater sensor networks is the energy consumption overhead caused by the RTS/CTS packets.
In [11], T-Lohi employs a novel tone-based reservation mechanism that exploits space-time uncertainty and high latency to detect collisions and count contenders, achieving good throughput across all offered loads, and it employs their low-power wake-up receiver to significantly reduce energy consumption.
In [9], three representative underwater MAC protocols, random access based UW-Aloha, handshaking based SASHA, and scheduling based pipelined transmission MAC (PTMAC), were presented and tested at Atlantic Ocean with 9 nodes deployed forming a multihop string network. From field experiment results, the high packet loss rate and significant channel asymmetry, temporal and spatial transmission range uncertainty, and delayed data transmissions are discovered to have evidential effects on the MAC performance. The experiments results show that PT-MAC is superior in end-to-end delay, delivery ratio, and throughput compared with other two MAC protocols. PTMAC [26] has parallel transmission feature. Nodes with three-hop distance in PTMAC can be scheduled to transmit simultaneously. However, adjacent nodes and nodes two hops away have staggered time slots. Otherwise, sending-receiving or receiving-receiving collisions will happen if packet duration time is not less than the propagation delay, which is generally true in most underwater networks.
In the literatures [27–34], many TDMA based underwater acoustic MAC protocols are proposed. In [12, 28], TDMA is more suitable for the underwater acoustic channel than FDMA and CDMA, because FDMA and CDMA need more bandwidth which is unavailable in the underwater acoustic channel. However, TDMA must take the long time guards into account due to the underwater channel's large propagation delay and delay variance. Moreover, the variable delay makes it a challenge for TDMA to realize precise time synchronization with a common timing reference.
MAC in MUWSN related literatures have been summarized in detail. CSMA based MAC protocols have good performance of real-time access, but the long propagation delay of acoustic signal is easy to bring misunderstanding of the current channel status and bring collisions. The underwater environment is complicated, and multipath phenomenon of acoustic signal stands out. CDMA seems an excellent solution, because it is a multiplex access method and has good capacity of multipath processing. It needs a high level of time synchronization, and some high performance processor or specified DSP is needed, which is not suitable for MUWSN from the aspects of power efficiency and cost. The worse scalability and longer delay have blocked TDMA based MAC protocols from being applied to many scenarios, but it has good power efficiency, lower collision rate, and easy to practice.
3. Design of the UA-MAC
According to the above analysis on the challenges of MAC protocol in MUWSN, UA-MAC will aim to solve the following difficulties.
Time schedule to access the channel: the time slot assignment method should consider the fairness to all nodes, network scalability, and practical issues. Hidden terminal: it is especially serious in MUWSN because of large propagation delay, while it will bring rapid reduction of network performance when nodes get dense. End-to-end delay: it is well known that TDMA based MAC protocol has bad scalability because the time slot of each node is usually fixed.
In this section, such problems and related solutions will be discussed in detail.
3.1. Underwater Acoustic Communication Characteristics
The available bandwidth of an underwater acoustic communication channel is severely limited because of the transmission loss which increases with the frequency and the range [1]. A medium-range communication system operating over several kilometers has a bandwidth on the order of 10 kHz, while a short range communication system operating over several tens of meters may be available more than 100 kHz [35–37]. Within the limited bandwidth, the signals are subject to multipath propagation through the channels whose characteristics vary with time and are highly dependent on the location of the transmitters and receivers. Combating multipath propagation to achieve a high data throughput is considered to be the most challenging task for an underwater acoustic communication system. In this paper, we choose 32 kHz as the underwater transducers' carrier frequency, and the bandwidth is limited in 5 kHz.
3.2. Factors for Network Schedule Improvement
First, some related concepts are given as follows:
Time frame (TF): a period of time especially with respect to some action or project. Slot time length (Ts): the active node can access the channel to transmit or transfer its local information in Ts. Slot number (Ns): the slot's sequence number in TF. Round trip time (RTT): between the source node and the destination node.
The slot number of common TDMA is bound with its ID, which is easy to analyze. Therefore, we discuss some characters from common TDMA firstly.
Assumptions.
There are n nodes in the network and with a linear topology, as shown in Figure 1. The time slot number of each node is same with the node ID. The time frame size is equal to the number of nodes.

Linear connection topology.
Theorem 1.
RTT is irrelevant to the nodes' sequence. It is determined by the number of hops as follows:

Proof.
As all the nodes are located in the sequence of their ID, the data transmitted by node 1 can reach node n in one time frame. However, each node cannot transfer the data until the next TF, because its slot number is less than the slot number of the last hop. Thus, RTT can be obtained by (1).
Now we exchange the sequence of any two nodes, say node l and node
The forward time from node 1 to node n will be delayed by one time frame because node
It is obvious that any node sequence changes can be considered as several manipulations of two nodes sequence exchange. Thus, the theorem holds.
After the slot number of each node is reassigned with the above rule, channel can be orthogonally utilized with respect to the time and space. Thus, TF can be reduced dramatically, which has been proved. And the time slot assignment method will be discussed in Section 3.3.
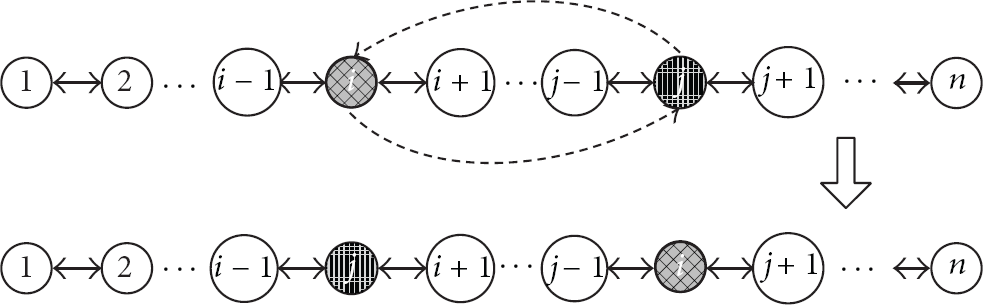
Linear connect topology of two nodes exchange.
Corollary 2.
When the time frame, TF, is time varying, RTT is irrelevant to the sequence of nodes. It is determined by the number of nodes and the size of TF as follows:

3.3. Slot Number Assignment Method
According to Corollary 2, we can see that two factors primarily influence the network efficiency using TDMA, hop numbers, and time frame. Hereafter, the optimization of both factors will be discussed.
The network can be represented by a graph
The 4-color theorem defines that four colors are enough to dye all nodes in condition that any neighbors are dyed with different colors [38, 39]. For avoiding hidden terminals in MUWSN, one more rule is needed that 2-hop neighbors cannot be dyed with same color either, which is called extended 2-hop color rule. In [40], the maximum kinds of colors of a plane graph G can be got with the maximum degree in the graph.
In a normal plane triangulation graph [41], the maximum degree is

In MUWSN, the communication range of the acoustic modem equipped in mobile nodes is usually within tens or hundreds of meters [7, 8]. For decreasing the interference between nodes and improving the network efficiency, the nodes usually are limited in 4 nodes. Therefor, 8 colors are enough to dye the plane graph with the extended 2-hop color theorem, which means that 8 time slots are necessary to schedule the MUWSN when the network degree is set with 4.
Neighbor coloring method mentioned above solves hidden terminal problems, which is a basic rule to achieve no collisions in the network. However, the network topologies are mostly overlapped, and the time slot for intersection nodes may be assigned ambiguously because they exist in different link trees, as shown in Figure 3.

Intersection collision problem.
Obviously, the scheme of intersection nodes is easy to be distorted because of the blindness of 2 routing path, as shown in Figure 3. Herein, a template is proposed, which defines a rule to specify the slot number according to their neighbors so as to avoid time slot assignment distorting. In the basic template, 9 slot numbers are distributed uniformly, as shown in the central shadow area in Figure 4. While the network extends from the center area, the template will be copied and shifted completely. As shown in Figure 4, the slot number of each node can be assigned by referring to their locations in the template. Thus, the schedule distorting problem of intersection node is solved through the simple template.
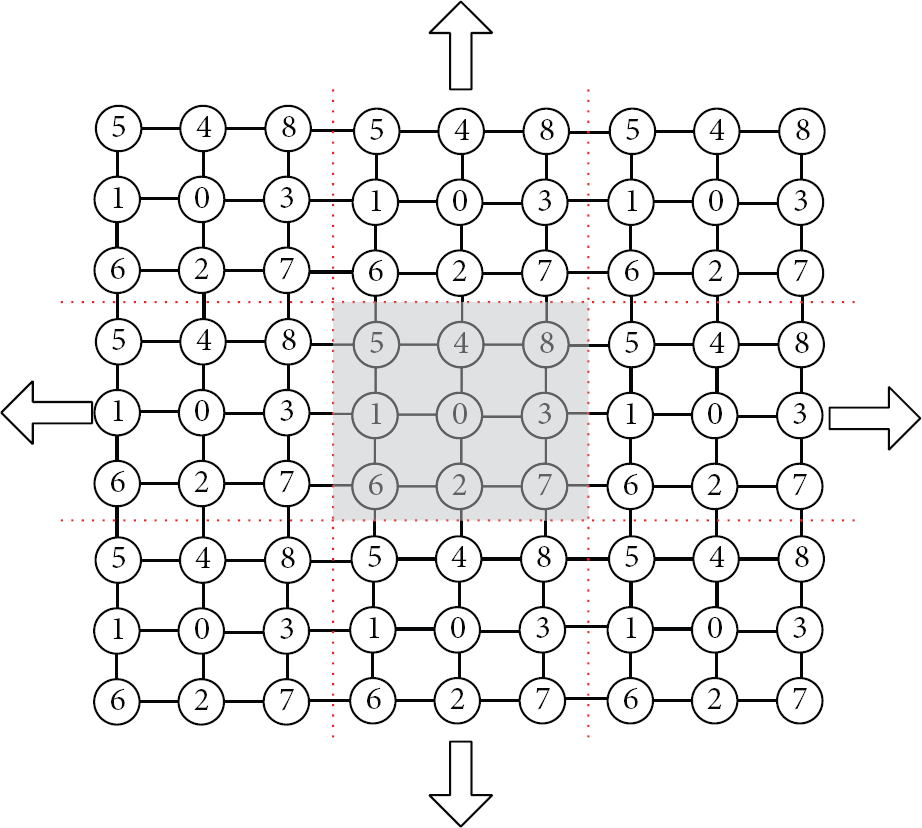
Model-reprography assignment method.
4. Implementation of UA-MAC
4.1. Network Schedule
The network configuration starts from the initialization of slot number. Typically, we start with the number of slots equal to nodes ID in the system. Each node is allocated a unique slot number while deploying, which is same with its local address.
Each node has 4 statuses, as shown in Figure 5. All nodes in the network keep the same status in one period. They change node status at the same time when a period is over.

Node status changing chart.
The nodes status and network schedule are given in Figures 5 and 6, respectively.

Network schedule.
All nodes involved in the network keep the same status in a period, and a period (shown in Figure 6) is set with number of slots. They change node status when a period is over. Each node will execute its operations while its slot arrives.
Neighbors and 2-hop neighbor table.

4.2. Time Slots Assignment Implementation
As mentioned in Section 4.1, after

Assignment process with hops.
The acoustic channel is scheduled from the parent node to children node hop by hop, and the real time slots of nodes are decided by themselves with the rule of template. The scheduling process is described as below.
Step 1.
All nodes execute the appointed actions in the periods of time synchronization and broadcasting neighbors table, in which nodes keep listening status and log the information of 2-hop neighbors into the neighbors table.
Step 2.
The first assignment command of time slot that includes the slot numbers bound to the first hop nodes is sent from the sink node at the third period. Neighbor nodes in next-hop gather such broadcasting command and at the end of the third period assign themselves a time slot according to the template. Thereafter, they can send commands in their private slot.
Step 3.
The second hop nodes will repeat Step 2, and then the scheduling will go on hop by hop as shown in Figure 7.
In the network scheme initialization, the data transmission can be done if only the slot is assigned.
The time slot is assigned in the end of the third period after gathering over the information of their parents' nodes. And the template matching algorithm will be implemented as below.
Step 1.
Nodes check the times of received assignment commands. If once, they can directly update their schedule with the command. Otherwise, they will judge by themselves in next step.
Step 2.
comparing the received multiple assignment commands with the template once more, they decide a suitable time slot themselves and update their scheme.
Step 3.
In the next period, these nodes will assign time slot to their children according to the template and broadcast the results.
Step 4.
The above 3 steps will be repeated till the edge nodes are scheduled.
The feature of high BER (bit error rate) of underwater acoustic link [7, 8] is an important issue of MUWSN. Some checkout bits are set in packets frame, and the whole packets would be dropped if some bits are wrong. To avoid mistake operations, the received node will keep silent in the located period.
4.3. Sensing Data Collection
When the slot arrives, the node will check if it has some data to send or transfer and then execute the corresponding task. Nodes can find the exact router to arrive the destination node if the destination node is in their neighbors or 2-hop neighbors table, otherwise, it will broadcast the packets.
5. Simulations and Experiments
Some evaluations about UA-MAC have been done, respectively, through simulations on NS-2 and experiments on the low-cost and low-power underwater sensor nodes we developed.
5.1. Simulations on NS-2
5.1.1. Time Slot Assignment Scheme
In NS-2, a common TDMA (MAC-TDMA) is default built in, in which the time slot number is bound with the node's ID and fixed all times. UA-MAC is also implemented in NS-2. The configurations of UA-MAC are listed in Table 2.
Simulation parameters.

The simulation scene where 20 nodes are distributed is shown in Figure 8. The link status and slot assignment results are shown in Figure 9.

Node distribution.

Link status chart and assignment result.
The network schedule in the router from node 0 to node 19 is shown in Figure 10.

Network schedule between node 0 and node 19.
5.1.2. Performance Evaluations
Network throughput is a traditional metric for MAC protocols that illustrates protocol efficiency. High channel utilization is critical for delivering a large number of packets in a short amount of time. The throughput changes with node number, as shown in Figure 11. In the common TDMA protocols, the time slot is bound with its node ID, and nearly there is no channel multiplexing in the network. While in UA-MAC, the number of time slot is not increased along the number of nodes, but only related with the density of nodes. And also after two-hops, the time slot is reused, which means that multiple communication links maybe coexisted at the same time. Therefore, the network throughput of UA-MAC is improved.

Network throughput with hop numbers.
The evaluation of channel utilizations for TDMA focuses on the numbers of active nodes in some area and some periods, because all nodes share the same limited frequency bandwidth and the acoustic channel is assigned with the time division. Therefore, the slot utilization can reflect the channel utilization for TDMA, as shown in Figure 12. In common TDMA, the channel is not multiplexed, while the channel can be reused after 2-hops away in UA-MAC, which is why the slot utilization of UA-MAC is better than common TDMA.
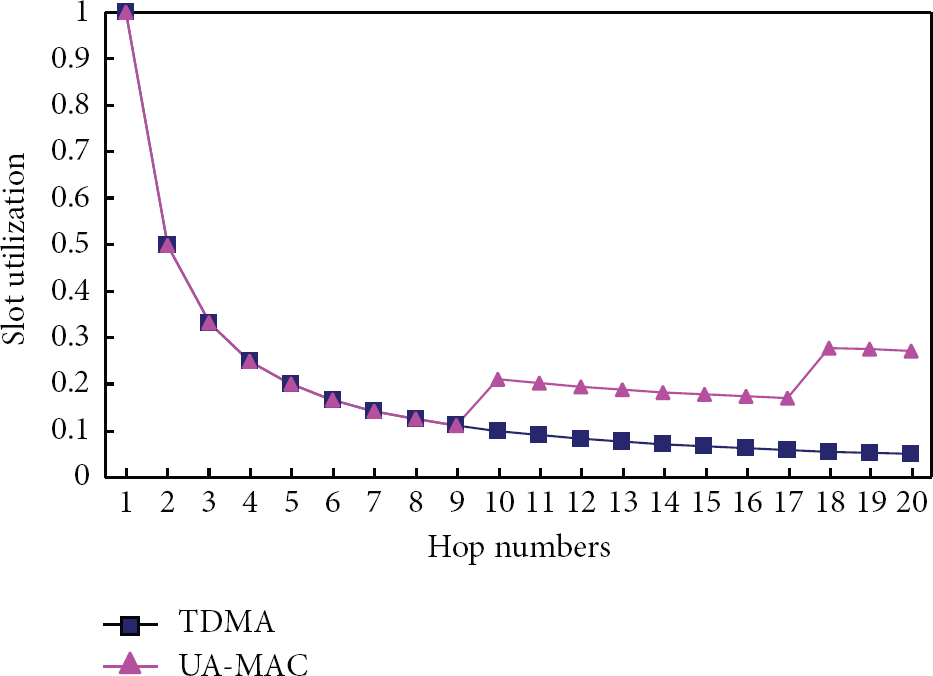
Slot utilization changing with node numbers.
UA-MAC makes TF less than that of common MAC largely, so RTT will not be related with total nodes numbers and only concerned with hop numbers, as mentioned in Section 3.2. The relationship between RTT and hop numbers is shown in Figure 13.

Packets latency with hop numbers.
5.2. Experiments
Underwater sensing nodes [8] developed by us, as shown in Figure 14, have been tested many times in indoor ponds, such as peer-to-peer network configuration, underwater information collection. The parameters of nodes are presented in Table 3.
Nodes parameters.


The underwater sensing node developed by us.
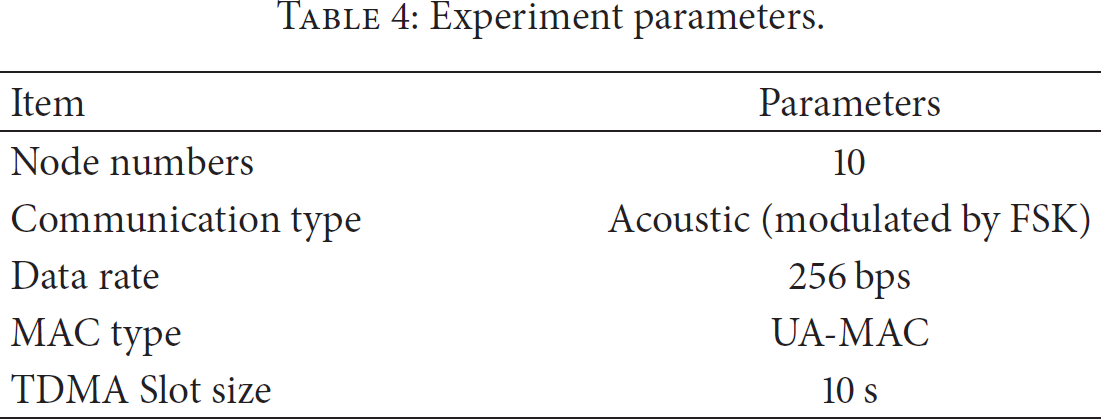
The underwater acoustic transducer transmits acoustic signal to some direction, and a multihop self-configuration network is setup in a pond, as shown in Figure 15. The experiment parameters are listed in Table 4. Ten nodes are disposed in the pond randomly, and the link status chart is shown in Figure 16.
Experiment parameters.

The experiments scene in ponds.

Network link status chart in the experiment.
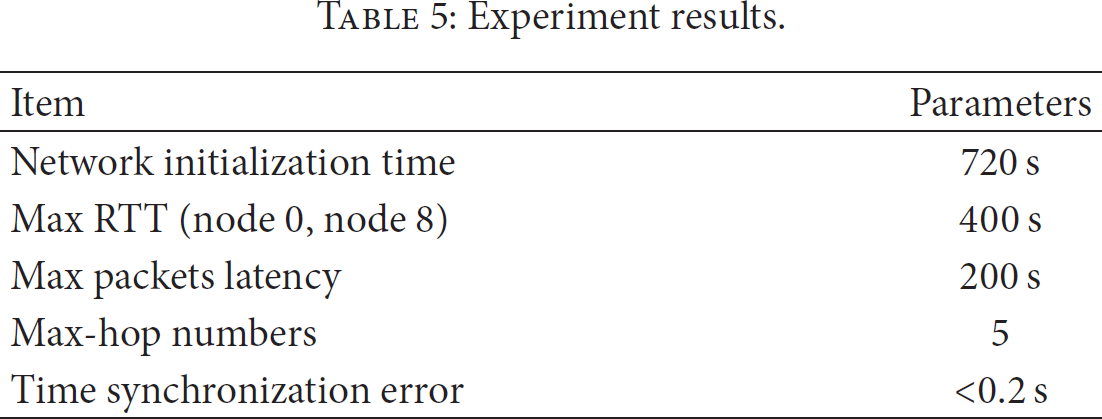
The network is initialized within 720 s, including nodes discovering, neighbors broadcasting, and time slot assignments. From the network link status chart, we can see that node 8 is the furthest node away with node 0, and the round trip time between them is 400 s. More experiments results are listed in Table 5.
Experiment results.
6. Conclusion
Underwater acoustic communication is affected by many factors which challenge MAC design on channel utilization, collision avoidance, and so forth. The proposed UA-MAC employs time division to access the channel and makes some improvements on network schedule for common TDMA. The time slot assignment method of UA-MAC is used for improving the channel utilization, eliminating the hidden terminal, and avoiding collisions. In addition, UA-MAC is implemented with piggyback method, and less packets are exchanged, which decrease the collision opportunities largely and save much energy.
Footnotes
Disclosure
This paper is original and has been written by the stated authors who are all aware of its content and approve its submission. It is not under consideration for publication elsewhere.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The work is supported by the National Natural Science Foundation of China, Grants no. 61303253, no. 51175496, no. 61233014, and no. 61333016.