
Abstract
This paper presents experimental studies on mechanical actuations of a pneumatic artificial muscle (PAM), which is driven by hydrogen gas based metal hydride (MH). The dynamic performances of hydrogen absorption/desorption, taking place within a MH reactor, are controlled via implementing cooling/heating effects of a thermoelectric module (TEM). Hydrogen pressure is applied as a driving force to commanding work outputs of the PAM as desired mechanical actuations. Due to strong inherent nonlinearity, a conventional proportional integral derivative (PID) control law is not capable of regulating thermodynamic variables of the HM reaction according to desired performances of the PAM. In this study, the fuzzy adaptive PID control is proposed in manipulating the MH reaction via the TEM. This viability of the proposed methodology is confirmed by the fact that the gains of PID control law are adapted by fuzzy rule-based tuning scheme at various operating conditions of the MH reactor. The experimental results show that the proposed control technique is much more effective than a PID control in both transient and steady state performances of the MH reactor for servo mechanical actuation of the PAM.
1. Introduction
Mechanical actuations of pneumatic artificial muscle (PAM) are widely applied in many industrial applications, especially robotic fields such as humanoid, robotic hand [1–4]. PAM actuation system continues to be developed for a better actuator. Basically, a PAM actuator can perform mechanical work in different kinds of motions by consuming pneumatic energy, which is supplied by compressed air, stored in a tank, and/or supplied from a compressor [5, 6]. However, those actuators cannot operate in the task, which requires compactness including high force/weight ratio, such as a rehabilitation application [7].
Currently, metal hydride (MH) technology is used to store hydrogen gas for efficient energy uses in various applications [8–10]. It is considered a solid state energy storage technology, which has more effective hydrogen gas storage than conventional storages, for example, compressed gas technology and liquid gas technology, due to power/weight ratio [11, 12]. Moreover, MH is capable of absorbing and desorbing large amounts of hydrogen gas [13]. Those properties are very interesting in developing new advanced pneumatic actuators. In this study, it is proper to apply MH for mechanical actuations that need compactness and light weight of pneumatic actuators [14–16]. Up to now, MH has increasingly gained high potentials as hydrogen storages of pneumatic actuation systems [17–19].
As known, hydrogen gas can be stored in and released from MH accordingly when operating conditions of pressure and temperature inside the MH reactor are altered during absorption/desorption processes [20]. In control design, a thermal conversion and management of MH are a challenging problem in viewpoints of not only software but also hardware. From preliminary investigations, it is not suitable to use a conventional heat pump or a cooling/heating loop of fluid to alter operating conditions due to tight mechanical or spatial requirements of advanced usages. In today's solid state technology, a thermoelectric module (TEM) is one of the most practical and compact technologies of heating or cooling without moving parts. In this work, the MH reactor is directly attached by TEM generating cooling/heating effects through heat conduction transfer between two surfaces. Operating conditions of MH within a reactor can be adjusted by regulating the electrical voltage of TEM.
To obtain desired performances on dynamic behaviors, conventional control laws are developed to manipulate the electrical voltage of TEM to alter operating conditions of typical thermal systems in many researches [21, 22]. Due to strong nonlinearities of the MH reactor coupled with TEM, it is difficult to apply a conventional proportional integral derivative (PID) control law in order to satisfy requirements of hydrogen absorption/desorption in both dynamic and steady state responses. Therefore, a fuzzy adaptive PID control is proposed to control the thermal MH reaction system in real-time implementation at various operating conditions. The basic concept and technique underline implementations on tuning capability, knowledge representation, and reasoning in fuzzy logic to PID control law [23–26].
The paper is organized as follows. An experimental setup for this study is explained in Section 2. Section 3 describes mathematical models of the PAM and the MH coupled with TEM. Section 4 presents a fuzzy adaptive PID control law. Section 5 shows experimental results in mechanical actuation control of the PAM-driven hydrogen gas based MH. Finally, the conclusion is remarked in Section 6.
2. Experimental Setup
Mechanical actuation control of the PAM via hydrogen absorption/desorption of MH is experimentally investigated under vertical loads. The schematic diagram of the servo control system and the experimental rig are illustrated in Figure 1. An industrial PAM of FESTO-fluidic muscle DMSP/MAS20-300N is used as a pneumatic actuator with the rated pressure of 6 bars. A nominal diameter of 3 cm and a length of 30 cm are chosen in this study. The mechanical structure of the PAM consists of a flexible rubber hose embedded with nonelastic steel braid. The PAM is connected with the MH reactor at inlet/outlet port through a 3 mm diameter aluminum tube. The hydrogen gas with UHP grade is supplied to the PAM. The MH reactor is made of a 4 cm × 4 cm × 2.5 cm copper box. It is coupled with a 45 W TEM and a heat sink at each wall side. The metal hydride-LaNi5 of 10 g is contained inside the MH reactor. Initially, all components are assembled in hydrogen gas environment. An ultrasonic sensor of Maxbotix-MB1010-42 kHz is mounted on experimental rig to measure a displacement of the PAM during mechanical actuations. The signal of the displacement is fed back to a controller. A pressure transducer of Sensys-Ixs-PTCH0030BCIA is installed to the aluminum tube so as to observe the pressure of hydrogen gas within the PAM actuator. The data acquisition system of Quanser MultiQ4 is used for collecting experimental data and implementing real-time control.

Actuation control system via MH reactor: (a) experimental rig and (b) schematic diagram.
3. Mechanical Actuation of PAM via Controlling MH Reactor Coupled with TEM
As illustrated in Figure 2, mechanical actuations of PAMs are conventionally performed under an air-powered system [27]. Without loss of generality, hydrogen gas, as working fluid in this work, is supplied into or released out of a chamber of the PAM during mechanical actuations instead of air. Kinematic definitions of the PAM behaviors are described as follows. At state 1, the PAM has the normal length, L n , where hydrogen gas within the PAM chamber is initially installed at atmospheric pressure, P a . From state 1 to state 2, the gas pressure is increased to higher pressure, P h , as the length of the PAM is reduced to the unstretched length, L u . This process undergoes no load condition. In turn, the unstretched length is a function of the pressure inside the PAM.
Kinematic definitions on mechanical actuation of PAM.
Later, the length of the PAM is increased by the pulling load from state 2 to state 3. The pulling force, F, is generated by the PAM against the pulling load. In other words, the PAM develops the pulling force when the PAM is stretched out from the unstretched length. The total length of the PAM changes from the unstretched length to the instantaneous length, L. The stretched length, L s , is defined as the difference between the total length of the PAM and the unstretched length at the same pressure. The empirical equation is determined to govern the nonlinear spring-like relations of the pulling force to the stretched length as in

where P g is the pressure within the PAM and K is the empirical stiffness of the PAM, which is dependent upon the gas pressure and the stretched length.
Like mechanical behaviors of a spring, the longer the stretched length, the more the pulling force. It can be seen in (1) that the stiffness of the PAM is dependent upon the pressure of hydrogen gas within the PAM. Position and force controls are obtained by altering the stiffness to perform mechanical actuations of the PAM as desired. Therefore, the pressure of hydrogen gas can be adjusted by controlling the amount of the hydrogen gas from absorption/desorption of MH, which is taking place within a reactor, as illustrated in Figure 3.

Hydrogen absorption/desorption of MH for mechanical actuation of PAM: (a) absorption and (b) desorption.
Actually, the MH is a metal alloy, which has bonded hydrogen atoms. It is capable of absorbing or desorbing considerable hydrogen atoms according to the changes of chemisorption conditions [28], as expressed in

where M is the hydrogen gas absorbing metal, H is the hydrogen atom, α is the hydrogen balancing coefficient, H2 is the hydrogen gas, T is the temperature within the MH reactor, P is the pressure within the MH reactor, and ΔH is the amount of reaction heat.
As illustrated in Figure 3(a), heat is pumped out of the MH reactor and the temperature inside the MH reactor decreases. Consequently, hydrogen gas is absorbed into the surface of the MH. The pressure inside the MH decreases. On the other hand, the temperature inside the MH reactor can be increased, when heat is applied to the MH reactor as depicted in Figure 3(b). Hydrogen atoms, which is bound to the MH, are released to be hydrogen gas under a desorption process. Accordingly, the pressure inside the MH increases. It should be noticed that P g and P are equivalent when the PAM is connected to the MH reactor. The pressure inside the MH is dependent upon the amount of hydrogen gas, which is determined by the state equation, as in
where
It can be remarked that the mass of hydrogen gas can be determined from the integral of the rate of change in amount of hydrogen gas in time. The rate of change in amount of hydrogen gas within the MH reactor is equal to the rate of change in amount of hydrogen gas, which is absorbed or desorbed. It is described by models of kinetic reaction [29].
For absorption,

For desorption,

where
It is seen from (4) and (5) that hydrogen gas is absorbed and desorbed by regulating the temperature of the MH inside a reactor so as to alter operating conditions in the MH reactor. By applying the principle of energy balance to a well-insulated MH reactor [30], the rate of change in the temperature,

where cP, MH is the specific heat of metal hydride,
To manipulate heating/cooling effects on the MH reactor, the TEMs are attached to the wall sides of the MH reactor as shown in Figure 3. The heat pumped from the MH reactor, Q C , or the heat rejected to the MH reactor, Q H , can be obtained by cooling or heating effects from the TEMs as depicted in Figures 3(a) and 3(b), respectively. By applying the input voltage to the TEMs, the rate of heat rejected at the hot side and the rate of the heat pumped at the cold side, respectively, are given by

with

where β is the Seebeck coefficient, T C is the temperature of the cold side, T H is the temperature of the hot side, r is the electrical resistance, k is the thermal conductivity, and v is the applied electrical voltage.
It should be remarked that cooling or heating effects can be selected by changing the polarity of the voltage source in practice. The amount of the rate of the heat transfer Q C, H is specified by the magnitude of the applied electrical voltage of the TEM. From (2)–(8), it can be seen that the hydrogen pressure inside of the MH reactor can be manipulated by regulating the applied electrical voltage of the TEM. In Section 4, the fuzzy adaptive PID control law is derived in order to effectively determine the applied electrical voltage of the TEM.
4. Fuzzy Adaptive PID Control
From equations (1)–(8) in Section 3, it can be interpreted by mathematical description that a PAM based MH actuation system has high nonlinearity. To obtain desired mechanical actuations of the PAM, a controller is tightly required to adjust the pressure within the chamber of the PAM and MH reactor by implementing cooling/heating effects from the TEM. It is difficult to make a conventional PID controller based on a linear control design since the mathematical models are strongly nonlinear. The fuzzy adaptive PID controller is proposed to perform PAM based MH actuations under various operating conditions. The architecture of the proposed control system is presented with the block diagram as illustrated in Figure 4. In turn, the controller is employed to regulate the voltage input of the TEM. The actual output, such as the position of one moving end of the PAM, is measured to compare with the desired output.
The fuzzy adaptive PID control system.
Generally, the PID control law for the applied electrical voltage is implemented as follows:

where e is the difference between the desired output and the actual output, K P is the proportional gain, K I is the integral gain, K D is the derivative gain of the PID control law, and t is the time.
Conceptually, the control law in (9) is used so that the error in the output is attenuated. The gain parameters of PID control law are determined by the Ziegler-Nichols tuning technique [31], which yields initial gain parameters at a given operating condition. To obtain better performance of dynamic responses in both transient and steady state response under various operating conditions, the gain parameters of the PID control law are determined as in (10) for K P , K I , and K D , respectively:

where K P ′, K I ′, and K D ′ are the initial parameters of proportional gain, integral gain, and derivative gain, respectively. ΔK P , ΔK I , and ΔK D are the adaptations of corresponding PID gains.
In Figure 4, a fuzzy control module is employed to make a decision in adaptation of the PID gain parameters based on fuzzy rules. The designed rule bases are defined according to the prevailing characteristics of the PAM based MH actuation system. The fuzzification, max-min inference mechanism, and defuzzification based on Mamdani's method [32] are performed to tune PID gain parameters.
In this work, implementing the inference mechanism of the fuzzy rules for adaptive tuning modules is defined as follows:
for ΔK P ,
rule i: if e is A
e
i
and
for ΔK I ,
rule j: if e is A
e
j
and
for ΔK D ,
rule k: if e is A
e
k
and
where i, j, and k are the indices of fuzzy rules for proportional gain, integral gain, and derivative gain, respectively, I, J, and K are the corresponding total numbers of fuzzy rules, and A
e
,
The fuzzy logic reasoning for using the adaptation of the PID gains can be determined by a method of centroid as expressed in

where μ is the membership function of the fuzzy linguistic sets and ∧ and ∨ are the minimum and maximum operators, respectively.
The proportional gain, integral gain, and derivative gain are adapted in real-time control implementation. The rule-based inference and fuzzy operations describe a fuzzy expert knowledge of systematically tuning the PID gains under various operating conditions of the PAM based MH actuation system. The implementation of the control strategy is quite straightforward as presented in the next section.
5. Results and Discussion
The experimental rig, as discussed in Section 2, is used to investigate performances of the proposed hydrogen-driven PAM actuator under a dead load of 10 kg. In mechanical actuations, the PAM carries the dead load at the desired positions. The PAM is actually driven by hydrogen absorption/desorption of the MH. In this work, the LaNi5 pellets are contained inside a fully closed reactor under hydrogen environment. The MH reactor is attached to two TEMs at the wall sides. The controller is implemented by the data acquisition system in regulating cooling/heating effects of the TEMs, as discussed in Section 3. In the control system, the applied electrical voltage is generated by the controller for manipulating the hydrogen pressure within the MH reactor for obtaining the desired positions.
Initially, the gains of the PID controller in (9) are obtained by the Ziegler-Nichols tuning technique. In Figure 5, they are determined from a plot of a step response in an open loop control. In the step response, plots of the displacement against time are illustrated in Figure 5(a). The applied electrical voltage is inputted to the TEMs by changing the magnitudes from 0 V to 5 V as seen in Figure 5(b), which results in heating effect. The dead load is lift up in time from the preset origin to the displacement of 4.3 cm while the desorption is observed during this actuation of the PAM. The characteristic values of the step response are defined by the dead time, d of 3.4 s, and the time constant, l of 17 s. In Table 1, the calculated PID gains are taken as the initial gains of the fuzzy adaptive PID controller.
PID gains determined by Ziegler-Nichols tuning technique.

Step response of displacement in hydrogen-driven PAM system.
Without adaptation, Figure 6 shows the performance of the PID controller where the PID gains are specified to be constant. It can be observed that the PID controller commands the PAM shifting the dead load up to the displacement at 3 cm and returning to the displacement at 0 cm, as depicted in Figure 6(a). Figure 6(b) shows that the hydrogen pressure increases and decreases while the PAM contracts and extends, respectively. It is found that the transient response is not satisfactory even though the error approaches zero at the steady state.

Performance of hydrogen-driven PAM actuator controlled by PID.
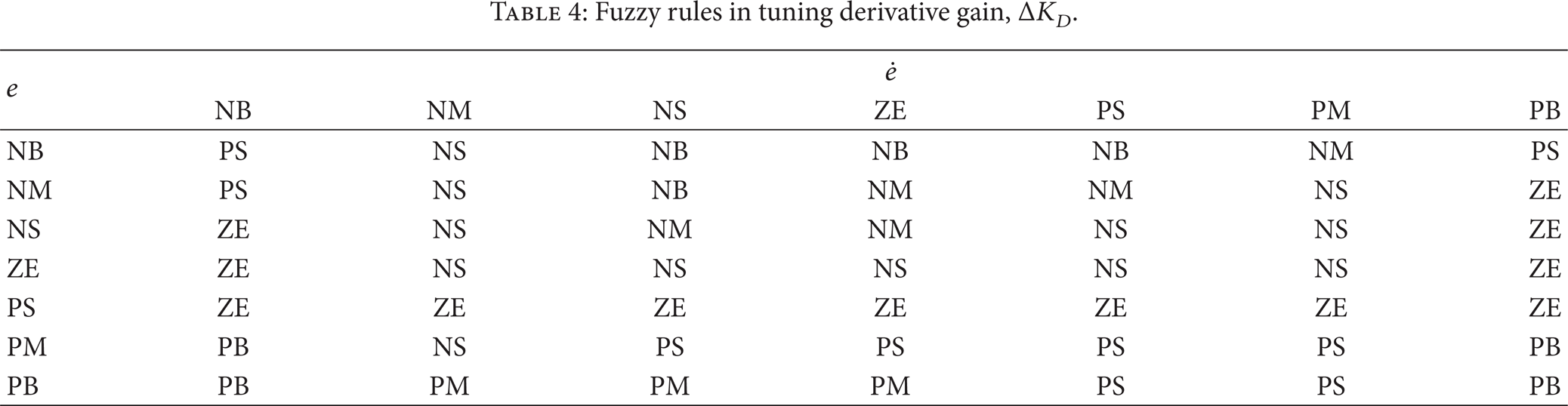
The values of the overshoot are quite high. It can be observed that the PID controller spends some time in adjusting the position of the dead load to reach the desired position. The nonlinearity of the hydrogen-driven PAM system is quite strong and the PID gains are not appropriately determined under various operating conditions. To yield better performances, the fuzzy adaptive PID controller is applied to the system. As mentioned in Section 4, the controller tuning is easily and effectively performed by using fuzzy tuning rules in achieving desired performance if the characteristics of the process change. The fuzzy tuning rules for adapting K P , K I , and K D are defined in Tables 2, 3, and 4, respectively. The linguistic terms of the fuzzy sets are negative big (NB), negative medium (NM), negative small (NS), zero (ZE), positive small (PS), positive medium (PM), and positive big (PB). For example, the fuzzy tuning rule, which is listed at the upper left corner in Table 2, is inferred as follows. If the error is NB and the rate of change in error is NB, then the adaptation of the proportional gain is PB. The fuzzy sets of the error, the rate of change in error, and the adaptation of the PID gains are subjectively defined from expert knowledge of gain tuning in Figure 7. The expert knowledge in Tables 2, 3, and 4 and Figure 7 is derived with practical experiences in tuning PID gain parameters from closed loop responses of experiments. By applying adaptation law to (10) and (11), there is still acceptable oscillation in the position of the dead load during initial adaptation of PID gains, as seen in Figure 8(a). Later, the actual displacement approaches the desired displacements at 3 cm and 0 cm. It can be noticed that there is no oscillation in the second round since the PID gains are continuously tuned. The transient and steady state responses are highly improved with comparison of the performances, as listed in Table 5. The hydrogen pressure, as shown in Figure 8(b), is properly regulated from the corresponding controller command of the applied electrical voltage, as depicted in Figure 8(c). Figure 9 presents the disturbance rejection of the proposed system. The pulling loads of 7 kg are added at time about 21 s. It can be seen that the fuzzy adaptive PID controller can also regulate hydrogen pressure within the MH reactor in order to maintain the desired position of the dead load at 3 cm. Unlike a conventional cylinder, the dynamic responses of the PAM are not rapid as usual even though the PAM is driven by compressed air. However, there are many soft-actuated applications such as humanoid, rehabilitation robots, and biomechanic bipedalism.
Fuzzy rules in tuning proportional gain, ΔK P .

Fuzzy rules in tuning integral gain, ΔK I .

Fuzzy rules in tuning derivative gain, ΔK D .
Key performance index of control.


Fuzzy sets in universes of error, rate of change in error, and adaptation of PID gains.

Performance of hydrogen-driven PAM actuator controlled by fuzzy adaptive PID.

Disturbance rejection in hydrogen-driven PAM actuator.
6. Conclusion
Mathematical modeling and control of a PAM based MH test bed are studied for finalizing a hydrogen-driven PAM actuator. The experimental rig is developed to investigate the dynamic performances of the PAM, which is driven by the gas pressure during hydrogen absorption/desorption of the MH under pulling loads. The designed MH reactor coupled with the TEM is of favorable effectiveness and compactness for hydrogen management and conversion. A fuzzy adaptive PID control is proposed to manipulate the MH reaction via the TEM so as to yield the desired mechanical actuations of the PAM. The tuning fuzzy IF-Then rule-based systems are systematically applied for altering the PID gains in real time for tracking the desired tasks under various operating conditions. In experimental works, the very good results of the servo real-time control implementation are clearly demonstrated in transient state and steady state. It is observed that the fuzzy adaptive PID controller significantly decreases overshoot, settling time, and steady state error in the position control compared with conventional PID control law. It is confirmed that the PAM based MH actuator gives feasibility of preferable mechanical actuations with compactness, high force/weight ratio, and compliance as expected in advanced humanoid applications.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
The authors are sincerely grateful to Thailand Research Fund (TRF) for the financial support, TRF-RSA5180011.