
Abstract
The area of three-dimensional (3D) underwater wireless sensor networks (UWSNs) has attracted significant attention recently due to its applications in detecting and observing phenomena that cannot be adequately observed by means of two-dimensional UWSNs. However, designing routing protocols for 3D UWSNs is a challenging task due to stringent constraints imposed by acoustic communications and high energy consumption in acoustic modems. In this paper, we present an ultrasonic frog calling algorithm (UFCA) that aims to achieve energy-efficient routing under harsh underwater conditions of UWSNs. In UFCA, the process of selecting relay nodes to forward the data packet is similar to that of calling behavior of ultrasonic frog for mating. We define the gravity function to represent the attractiveness from one sensor node to another. In order to save energy, different sensor nodes adopt different transmission radius and the values can be tuned dynamically according to their residual energy. Moreover, the sensor nodes that own less energy or locate in worse places choose to enter sleep mode for the purpose of saving energy. Simulation results show the performance improvement in metrics of packet delivery ratio, energy consumption, throughput, and end-to-end delay as compared to existing state-of-the-art routing protocols.
1. Introduction
Underwater wireless sensor networks (UWSNs) have a lot of potential application areas such as oceanographic data collection, disaster prevention, pollution monitoring, offshore exploration, and military surveillance [1–3]. Radio frequency (RF) signals suffer from severe attenuation in water and have been successfully deployed only at very low frequencies, involving large antenna and high transmission power. Hence, acoustic signals have been used for wireless communication in current underwater physical layer, which has challenges to be overcome such as long propagation delay resulting from low speed of sound propagation, severely limited bandwidth, and time-varying multipath propagation [4]. All the above distinct features of UWSNs give birth to new challenge areas for every level of the network protocol suite. UWSNs mainly consist of two communication architectures: two-dimensional and three-dimensional (3D) underwater networks [1]. 3D UWSNs are used to detect and observe phenomena that cannot be adequately observed by means of ocean bottom underwater sensor nodes, that is, to perform cooperative sampling of the 3D ocean environment [5, 6]. In 3D UWSNs, sensors float at different depths to observe a given phenomenon. Many problems arise with UWSNs that need to be solved in order to enable underwater monitoring in the new environment. Among them, providing efficient routing is a very challenging task due to the unique characteristics of UWSNs. In UWSNs, battery power is a vital resource for each wireless sensor because of the difficulty and cost in recharging sensor batteries once the network is deployed. Many methods for energy conservation at different layers have been investigated in terrestrial wireless sensor networks. However, these methods are not applicable to UWSNs. According to their architectures, the routing protocols of UWSNs can be divided into three categories: location-based routing, flat routing, and hierarchical routing [7]. Location-based routing has good scalability, but it requires a positioning system or positioning algorithm to help the nodes to calculate the location information. Flat routing protocols have better robustness, but the excessive overhead for maintaining routing information restricts their application to small-scale underwater acoustic circumstances. Hierarchical routing also has good scalability, but the cluster maintenance overhead and the failure of key nodes will affect the routing efficiency.
Frog calling and hearing have been shown to be important for species recognition, mate assessment, and localization. Most interestingly, an unusual species called concave-eared torrent frog (Amolops tormotus) lives near the noisy Yellow Mountain in eastern China and produces diverse bird-like melodic calls that often contain spectral energy in the ultrasonic range (frequencies greater than 20 KHz) [8]. It is demonstrated that the male frogs emit advertisement calls using ultrasound to avoid masking by the wideband background noise of local fast-flowing streams. Although the female frogs exhibit no ultrasonic sensitivity, they emit courtship calls that evoke extraordinarily precise phonotaxis of the male frogs, rivalling that of vertebrates with the highest localization acuity (barn owls, dolphins, elephants, and humans) [9, 10]. Calling is linked to physical size and females may be attracted to more vigorous calls. The smallest frogs must consume lots of energy to produce calls. In male-male competition, some male frogs may stop calling or remain in chorus (each frog calls in turn) for longer periods of time based on a comparison between the benefit of obtaining a higher mating probability and the cost of losing more energy. In this paper, we present an ultrasonic frog calling algorithm (UFCA) for routing in UWSNs, which has been ethologically inspired by the calling behavior of concave-eared torrent frog. UFCA does not require fixed routing tables or periodic flooding messages for the routing path discovery. Therefore, it is resistant to node mobility and temporary loss of connectivity which are prevalent in UWSNs. In UFCA, different sensor nodes adopt different transmission radius, which can be tuned dynamically according to their residual energy. Moreover, the sensor nodes that own less energy or locate in worse places choose to enter sleep mode for the purpose of saving energy. As a distributed routing algorithm, no topology information needs to be exchanged among neighboring nodes and only a small fraction of the sensor nodes are involved in routing to ensure energy-efficient operations for surveillance and monitoring applications.
The remainder of the paper is organized as follows: Section 2 presents a brief overview of related work, while Section 3 introduces the proposed scheme in detail. Performance evaluation is described in Section 4. Finally, we conclude the paper in Section 5.
2. Related Work
The underwater environment introduces difficulties in designing efficient routing protocols not experienced terrestrially, such as transmission loss due to geometric spreading and absorption by the ocean [11, 12]. Tan et al. [13] proposed a new protocol based on hop-by-hop hybrid implicit/explicit acknowledgment scheme which is proposed for a multihop UWSN. In the protocol, data packets forwarded by downstream nodes can work as implicit ACKs for previous transmitted data packets. Vahdat and Becker [14] proposed epidemic routing (ER) protocol where each node replicates a packet to every encountered node. ER can utilize every opportunity to deliver a packet to the destination and maximize successful delivery ratio and minimize average end-to-end delay in unconstrained networks. However, this routing protocol consumes too many resources that make it not desirable in resource constrained networks such as UWSNs. Pompili et al. [15] introduced two distributed routing algorithms for delay-insensitive and delay-sensitive applications, respectively, with the objective of minimizing the energy consumption taking the varying condition of the underwater channel and the different application requirements into account.
Vector-based forwarding (VBF) [16] is a geographic approach, which allows the nodes to weigh the benefit to forward packets and reduce energy consumption by discarding low benefit packets. Therefore, over a multihop path, only the nodes that are located within a pipe of given width between the source and the destination are considered for relaying. However, in the areas of low density of nodes VBF may not find the path close to the routing vector. Similarly, Jornet et al. proposed focused-beam routing (FBR) [17] protocol that is suitable for networks containing both static and mobile nodes. The objective of FBR is to determine which nodes are candidates for relaying. Candidate nodes are those that lie within a cone of angle
Depth-based routing (DBR) [19] can handle network dynamics efficiently without the assistance of a localization service. DBR forwards data packets greedily towards the water surface (i.e., the plane of data sinks). In DBR, a data packet has a field that records the depth information of its recent forwarder and is updated at every hop. But DBR has only greedy forwarding mode, which alone is not able to achieve high delivery ratios in sparse areas. Wahid et al. [20] proposed an energy-efficient routing protocol, called ERP2R (energy-efficient routing protocol based on physical distance and residual energy) based on the idea of utilizing the physical distances of the sensor nodes towards the sink node. ERP2R also takes into account the residual energy of the sensor nodes in order to extend the network life-time. However, ERP2R may lead to longer routing path with the growth of network density depending on the physical distances towards the sink node, which in turn consumes additional energy. Moreover, the characteristics of node mobility in UWSNs often make the problem worse. Ayaz and Abdullah [21] proposed a hop-by-hop dynamic addressing based (H2-DAB) routing protocol to provide scalable and time-efficient routing for UWSN. The H2-DAB routing protocol does not require any dimensional location information or any extra specialized hardware compared with many other routing protocols in the same area. However, the problem of multihop routing still exists as it is based on multihop architecture, where nodes near the sinks drain more energy because they are used more frequently.
Packet redundancy and multiple paths can be exploited in order to increase the reliability of UWSNs. Ayaz et al. [22] provided a two-hop acknowledgment reliability model in order to insure the reliable data deliveries to the surface sinks, where two copies of the same data packet are maintained in the network without extra burden on the available resources. A relay node that has data packets to forward will not reply with the acknowledgment until it cannot find the next hop towards the destination. But if a node is unable to find the next hop due to any failure, or even if it is lost, then packets in the buffer are not considered lost. All the nodes that send the data packets towards this node will wait for a certain amount of time before trying again for the next hop. Xu et al. [23] proposed a multiple-path forward error correction (M-FEC) approach that integrated multiple-path communications and Hamming coding to eliminate retransmission and enhance reliability in underwater sensor networks. Moreover, a Markov model and a dynamical decision and feedback scheme were developed to decrease the number of the paths in order to save energy and ensure the desirable packet error rate. However, M-FEC may cause much long delay because of additional process of encoding and decoding the data packets.
3. Proposed Scheme
3.1. Network Model and Energy Consumption
We consider that 3D UWSNs are composed of a certain number of sensor nodes uniformly scattered in monitoring fields. We present a generic model for a 3D UWSN that is represented by
Definition 1.
The function

Underwater wireless sensor nodes are equipped with sensing devices. They collect data from the external environment and transmit these data by one or multihop to the sink node. Sink node is the node that generates data aggregation results and also the target location of the data transmission. Each sensor node can either transmit or receive data packets. All sensor nodes can tune their transmission radius ranged from
Consider two sensor nodes at minimum hop distance h, there exist two values

Sensing devices generally have widely different theoretical and physical characteristics. Thus, numerous models of varying complexity can be constructed based on application needs and device features. However, for most kinds of sensors, the sensing ability diminishes as distance increases.
Definition 2.
For a sensor s, the general sensing model S at an arbitrary point p is expressed as
We assume that all sensor nodes are equipped with limited battery resources without recharging or replacing node batteries after deployment. The network lifetime is defined as the time until the first sensor node in the network depletes its energy. The energy consumption model is the same as that in [28] where the attenuation and the energy spreading factor (1 is for cylindrical, 1.5 is for practical, and 2 is for spherical spreading) are taken into consideration.
Acoustic signal has different transmission modes in shallow water (where the depth of the water is lower than 100 meters) and deep water (where the depth of the water is above 100 meters). In shallow water, the transmission of the acoustic signal is limited to a cylindrical area from bottom to the surface, while in deep water, the transmission of the acoustic signal is mainly with spherical diffusion and the energy consumption is caused by spherical diffusion and water absorption. This paper concentrates on the shallow water scenario.
The passive sonar equation [29] characterizes the signal-to-noise ratio (SNR) of an emitted underwater signal at the receiver, which is presented by

The transmission loss TL can be defined as the accumulated decrease in acoustic intensity as an acoustic pressure wave propagates outwards from a source. The transmission loss for cylindrically spread signals is calculated as


The noise level NL in shallow water is mainly affected by waves, shipping traffic, wind level, and the activities of large mammals. For simplicity, we consider an average value for the noise level NL to be 70 dB as a representative shallow water case [30].
SL can be defined as the intensity of the radiated sound in decibels related to the transmitted signal intensity at 1 meter from the source according to the following expression:


As a result, the transmitter power

3.2. Ultrasonic Frog Calling Strategy
UFCA is inspired from the calling behavior of concave-eared torrent frog. Male concave-eared torrent frogs can produce diverse bird-like melodic advertisement calls with pronounced frequency modulations that often contain spectral energy in the ultrasonic range. Although female concave-eared torrent frogs exhibit no ultrasonic sensitivity, their courtship calls can evoke extraordinarily precise phonotaxis of the male frogs with high localization acuity.
Suppose there are six concave-eared torrent frogs randomly distributed in a space as shown in Figure 1. Frog

Ultrasonic frog calling strategy.
3.3. Routing Algorithm
UFCA consists of two phases: candidate discovery phase and relay node selection phase. Figure 2 illustrates the candidate discovery phase. Each frog denotes a sensor node and each number in the frog denotes the residual energy of local sensor node. Sink nodes do not have any energy constraints because they are equipped with both radio-frequency (RF) and acoustic modems and are deployed at the water surface. As for static sink nodes, they only need to broadcast their positions to the whole network one time at the initial stage of the network operation, which would not produce significant energy dissipation [31]. The sensor node that holds the data packet is the transmitter, which is similar to the gravid female frog in Figure 1. Each data packet carries the positions of the source node, the sink node, and the relay node (i.e., the node that transmits this packet). Suppose


Candidate discovery phase.
The process of selecting a candidate as the relay node to forward the data packet is illustrated in Figure 3. After the transmitter

Relay node selection phase.
Definition 3.
Given a sensor node

At last, the transmitter
Algorithm 1 describes the process of building the routing path with ultrasonic frog calling algorithm in detail.
(1) Queue (2) (3) (4) (5) (6) (7) (8) (9) according to formula (10); (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) p.enqueue( (20) (21) TTL− −; (22) (23) (24) (25) p.clear(); (26) (27) (28)
All data packets at relay nodes should have limited lifetime, which are controlled by TTL (time-to-live) information carried in the packet header. At first, the routing path p is created as an empty queue structure after initialization as described in line 1. While TTL value is bigger than zero and the sink node is not reached, the process of building the routing path is repeatedly executed. And then, the source node
In many proactive routing protocols, the active sensor nodes must send periodic update packets to other nodes even when the routing information is similar to the previous one. Moreover, the storage overhead for routing table maintenance also grows quickly as the size of the network increases. Although some reactive routing protocols can avoid the overhead incurred by routing table maintenance, the periodic flooding messages for the routing path discovery is another deadly cost in resource-constraint underwater wireless sensor networks. In UFCA, the update of candidate set is evoked only when this sensor node is selected as a transmitter. After that, it can determine where to forward a data packet without the need of routing table maintenance or any flooding mechanism.
4. Performance Evaluation
4.1. Simulation Settings
We use Aqua-Sim [32] as simulation framework to evaluate our approach. Aqua-Sim is an
As the long propagation delay and limited bandwidth of acoustic channels make the existing MAC protocols widely used in radio networks unpractical for UWSNs, this paper adopts R-MAC [32] protocol as the underlying MAC protocol in order to avoid data packet collision. R-MAC schedules the transmission of control packets and data packets at both the sender and the receiver to avoid data packet collisions. Therefore, we do not distinguish courtship packet and advertisement packet from each other in MAC layer. In fact, we only need to make certain that which node is the sender and which node is the receiver in this session.
We use the following metrics to evaluate the performance of different routing protocols.
Packet delivery ratio is defined as the ratio of the number of distinct data packets received successfully at the sinks to the total number of data packets generated at the source node. Energy consumption takes into account the total energy consumed in packet delivery, including transmitting, receiving, and idling energy consumption of all nodes in the network. Throughput equals the total data bits received at the sink nodes divided by the simulation time. Average end-to-end delay represents the average time taken by a data packet that travels from a source node to any sink node.
We compared the performance of ultrasonic frog calling algorithm (UFCA) with that of vector-based forwarding (VBF) and ERP2R (energy-efficient routing protocol based on physical distance and residual energy). In the simulations of UFCA, the minimal and maximal transmission range is set to 50 meters and 100 meters, respectively, in all directions, while the transmission range in VBF and ERP2R is fixed at 100 meters. Moreover, the routing pipe radius in VBF is set to 20 meters, which is a default value in [16].
4.2. Simulation Results
In the first set of simulations, we compared the packet delivery ratio with the number of nodes in different routing protocols. The average speed of nodes is set to 2 m/s. As shown in Figure 4, the packet delivery ratio of three routing protocols is proportional to the number of nodes. UFCA performs best among the three routing protocols in the same circumstances and VBF achieves higher packet delivery ratio than that of ERP2R. Moreover, the curve of VBF rises faster than other protocols. This is because, with the growth of network density, more sensor nodes will fall in the routing pipe of VBF with fixed radius as the transmission range. The packet delivery ration of UFCA is significantly improved over other protocols especially when the network is sparse as UFCA can find more routing paths for data delivery in sparse networks. Specifically, UFCA improves 34.3% of the packet delivery ratio than that of ERP2R and 11.9% of the packet delivery ratio than that of VBF on average.
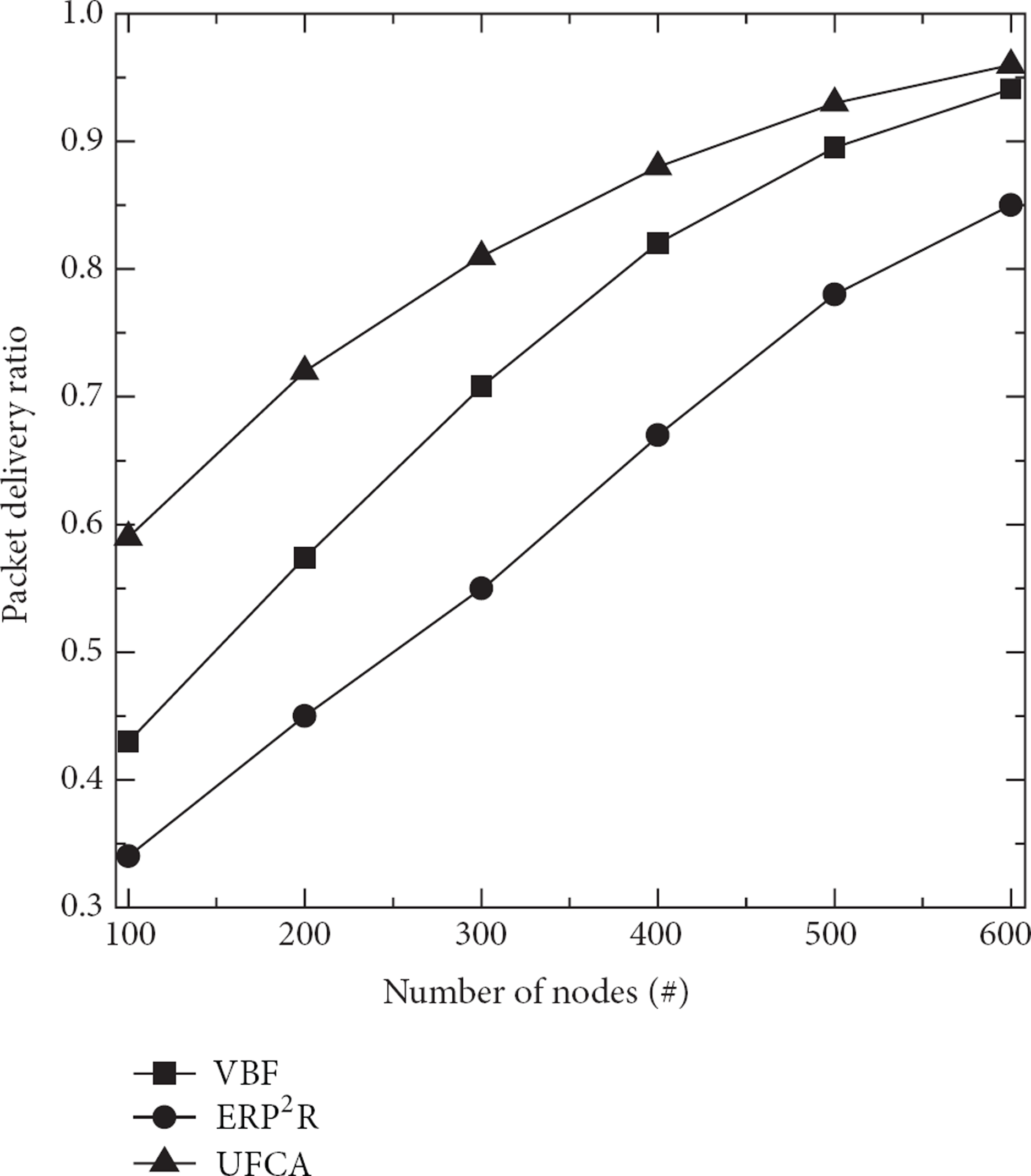
Packet delivery ratio versus number of nodes.
Figure 5 illustrates the comparison of the packet delivery ratio with average speed of nodes in different routing protocols. The number of sensor nodes is set to 400 for each protocol. Overall, the packet delivery ratio of three routing protocols is inversely proportional to average speed of nodes. UFCA achieves higher packet delivery ratio than that of ERP2R and VBF when their speeds of nodes are the same. The packet delivery ratio of ERP2R decreases rapidly with the growth of node mobility. This is because the rate of updating routing information in ERP2R cannot catch up with the increase of node mobility. Specifically, UFCA improves 32.5% of the packet delivery ratio than that of ERP2R and 6.4% of the packet delivery ratio than that of VBF on average.

Packet delivery ratio versus average speed of nodes.
In the second set of simulations, we compared the energy consumption with the number of nodes in different routing protocols. The average speed of nodes is set to 2 m/s. As shown in Figure 6, the energy consumption of three routing protocols is proportional to the number of nodes. UFCA performs better than other routing protocols in the same circumstances. Moreover, the curve of UFCA has a gentler slope compared with that of ERP2R and VBF. This is mainly due to more sensor nodes entering the sleep mode with the increase in sensor nodes in UFCA. ERP2R consumes less energy than VBF because energy factor is not given in the routing determination of VBF. As a result, UFCA decreases 26.1% of the energy consumption than ERP2R and 41.5% of the energy consumption than VBF on average.

Energy consumption versus number of nodes.
Figure 7 illustrates the comparison of the energy consumption with average speed of nodes in different routing protocols. The number of nodes is set to 400 for each protocol. The energy consumption of three routing protocols is proportional to the TTL value. UFCA consumes less energy than ERP2R and VBF when their speeds of nodes are the same. Moreover, the curve slopes of UFCA and VBF are rather gentle compared with that of ERP2R, which means that the factor of node mobility has slight influence on energy consumption of UFCA and VBF. ERP2R consumes less energy than VBF except when average speed of nodes reaches 4 m/s. On average, UFCA decreases 25.7% of the energy consumption than ERP2R and 36.2% of the energy consumption than VBF.

Energy consumption versus average speed of nodes.
In the third set of simulations, we compared the throughput with the number of nodes in different routing protocols. The average speed of nodes is set to 2 m/s for each protocol. As shown in Figure 8, the throughput of three routing protocols is proportional to the number of nodes. The front parts of curves indicate rapid increases in throughput while the rear parts of curves show slow growth rates after the number of nodes has reached high value. The reason is that with the growth of network density, the routing paths become more crowded and downstream nodes cannot receive data packets from several of its upstream nodes simultaneously. Overall, UFCA performs better than other routing protocols in the same circumstances. VBF achieves higher throughput than ERP2R. On average, UFCA improves 21.5% of the throughput than ERP2R and 9.3% of the throughput than VBF.

Throughput versus number of nodes.
Figure 9 depicts the comparison of the throughput with average speed of nodes in different routing protocols. The number of nodes is set to 400 for each protocol. The throughput of three routing protocols is inversely proportional to average speed of nodes. UFCA achieves higher throughput than that of ERP2R and VBF when their average speeds of nodes are the same. Noticeably, the throughput of ERP2R decreases sharply when average speed of nodes is more than 2 m/s. This is because more routing cost and residual energy of the nodes as well as their neighbors along routing paths have to be recalculated with the increase in average speed of nodes in ERP2R. On average, UFCA improves 15.4% of the throughput than ERP2R and 6.5% of the throughput than VBF.

Throughput versus average speed of nodes.
In the last set of simulations, we compared the average end-to-end delay with the number of nodes in different routing protocols. The average speed of nodes is set to 2 m/s for each protocol. As shown in Figure 10, the average end-to-end delay of three routing protocols is inversely proportional to the number of nodes. UFCA achieves less end-to-end delay than ERP2R and VBF when the number of nodes is the same. The reason is that UFCA introduces less control packets than other protocols for communicating with the related sensor nodes during the process of routing. The cost for the computation of residual energy and gravity values in UFCA is far less than that in network communication. ERP2R performs better than VBF because the highest priority node in ERP2R has a holding time of zero, which can reduce the end-to-end delay to a certain degree. On average, UFCA decreases 11.2% of the average end-to-end delay than ERP2R and 31.2% of the average end-to-end delay than VBF.

Average end-to-end delay versus number of nodes.
Figure 11 shows the comparison of the average end-to-end delay with the average speed of nodes in different routing protocols. The number of nodes is set to 400 for each protocol. Overall, the average end-to-end delay of three routing protocols is inversely proportional to the average speed of nodes. UFCA achieves less end-to-end delay than ERP2R and VBF when their average speeds of nodes are the same. It is worth noting that ERP2R owns a curve with rapid increasing trend. This is because more sensor nodes in ERP2R need to reevaluate their distances to the sink node with the growth of node mobility. Specifically, UFCA decreases 8.1% of the average end-to-end delay than ERP2R and 26.3% of the average end-to-end delay than VBF on average.

Average end-to-end delay versus speed of nodes.
4.3. Discussion
Compared to algorithms such as VBF and ERP2R, UFCA is totally a different approach. In VBF, only the sensor nodes located in a predefined routing pipe are eligible for packet forwarding, and those which are not close to the routing pipe do not forward the packets no matter whether they are suitable for building a shorter routing path. Therefore, the routing performance in VBF mainly depends on the node density and it cannot benefit from the deployment of multiple sink nodes if they are not close to each other. In ERP2R, forwarding nodes are selected based on the physical distance of the sensor nodes. Each sender selects the nodes nearer to the sink node for routing decision, which is not always helpful when the node density is sparse. Although ERP2R can balance the energy consumption using a residual energy-based timer, its performance decreases dramatically with the growth of node mobility. UFCA is inspired by the calling behavior of concave-eared torrent frog. In UFCA, the process of finding an optimal routing path is similar to the process of mating with an appropriate frog with characteristics of accurate and energy-efficient. Consequently, UFCA achieves better routing performance than VBF and ERP2R regardless of node density and mobility. Moreover, different sensor nodes adopt different transmission radius according to their residual energy in UFCA and the sensor nodes that own less energy or locate in worse places choose to enter sleep mode for the purpose of saving energy. Through these means, the energy consumption is somehow equalized on the whole and the network lifetime is prolonged. Thus, the inherent adaptive nature of such algorithm is one of the main attractions in biologically inspired approaches.
5. Conclusion
Finding an optimal routing path in adverse underwater environment in 3D UWSNs has always been a challenging task, especially when the factor of energy consumption is taken into consideration. Inspired by the calling behavior of ultrasonic frog in mating, this paper proposed an ultrasonic frog calling algorithm (UFCA) that aims to achieve energy-efficient routing under harsh underwater conditions of UWSNs. UFCA does not require fixed routing tables or periodic flooding messages for the discovery of routing path. In UFCA, different sensor nodes adopt different transmission radius, which can be tuned dynamically according to their residual energy. Moreover, the sensor nodes that own less energy or locate in worse places choose to enter sleep mode for the purpose of saving energy. Simulation results show the performance improvement in metrics of packet delivery ratio, energy consumption, throughput, and end-to-end delay as compared to existing state-of-the-art routing protocols.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was sponsored by the National Nature Science Foundation of China (61202370, 51279099), the Innovation Program of Shanghai Municipal Education Commission (14YZ110), the Shanghai Pujiang Program from Science and Technology Commission of Shanghai Municipality (11PJ1404300), and the Open Program of Shanghai Key Laboratory of Intelligent Information Processing (IIPL-2011-008).