
Abstract
Many applications in wireless sensor networks require some sensors to form a ring or multiring-based shape in the target area, such as intrusion detection, border surveillance, routing overlay formation, and network full coverage. In this paper, we study the problem of sensor redistribution to build a ring-based shape for mobile sensor networks. We first give the theoretical analysis on what is optimal sensor movement with the given random deployment. Then, we propose a fully distributed movement control algorithm to achieve ring-based shape for mobile sensor networks. We formally prove that our algorithm can achieve a ring-based distribution within finite time. We also present the procedures of applying our algorithm to form multiring-based distribution. Finally, we present extensive simulations to verify that our approach outperforms other schemes in terms of both the moving distance and convergence time.
1. Introduction
A typical wireless sensor network (WSN) is composed of hundreds to thousands of sensor nodes reporting their data to the information collector, referred to as the sink node. Sensor nodes are usually of low-cost and low-power, having limited sensing, computing, and communication capabilities. In recent years, with the rapid progress in advanced VLSI and radio frequency (RF) technologies, WSNs have attracted lots of interest due to their potential use in various applications such as military surveillance, environment monitoring, fire detection, target tracking, and emergency navigation [1–4].
Ring-based shape is an important formation for many practical applications of WSN, such as a ring-based overlay among the target area [5, 6] to forward data, which can enhance the data transmission efficiency and avoid the energy hole problem for the whole network. In addition, some applications require ring-based barrier among the border to detect illegal intrusion or radiation spills around nuclear borders or monitor the spread of forest fire and so on [7]. Generally, resource-limited sensor nodes are dropped from airborne vehicles for remote surveying of unattended environment without a preconfigured infrastructure [8]. Those sensor nodes are typically left unattended and remain static after initial deployment. Sometimes, establishing ring-based shape over a hostile or dangerous target area could be a daunting task. To illustrate the point, imagine the following scenario: where static sensors are deployed for monitoring wildfire applications, events such as winds, malicious attacks, and sensor failures are likely to cause network partitions. Thus, it is necessary to make use of mobile sensors, such as attaching sensors to robots or vehicles [9], or self-propel via springs [10] or wheels [11].
Inspired by the potential applications of sensor mobility, there have been some research efforts on the sensor redistribution for mobile sensor network [12–16]. However, due to the power-constrained batteries, it is a critical consideration in designing energy conserving movement plan for each sensor node. Considering that energy consumption in moving is larger than in communication and processing, we are motivated to study the optimal sensor redistribution problem to form a ring-based shape while minimizing total moving distance. Generally, the sensor movement control can be classified into two types: centralized execution and distributed execution. In centralized execution, the movement plan is calculated in a sink node or cluster node, and the final results are broadcast to all mobile sensors. However, the selection of cluster node and the exchange of global location information during dynamic movement would put a heavy traffic burden. Hence, distributed movement execution to form a ring-based shape should be researched, in which each sensor updates its position only using local information from its neighbour sensors, thus saving energy and ensuring scalability.
In this paper, we try to investigate the problem of moving sensors to achieve a ring-based shape with minimum moving distance. Firstly, the optimal sensor layout with random deployment is presented. Then, a fully distributed sensor redistribution algorithm for mobile sensor networks is proposed. Formally, our algorithm is proven to provide ring-based distribution and terminates within a finite time. Simulation results are presented to show the effeteness of our algorithm. The rest of the paper is organized as follows. Section 2 discusses the related literature. Section 3 describes the network model, problem formulation, and theoretical analysis on optimal sensor redistribution. A fully distributed sensor redistribution strategy is proposed in Section 4. Section 5 presents the simulation results for our algorithms, and Section 6 concludes our paper.
2. Related Work
More recently, there has been growing interest in optimizing the sensor redistribution to improve network performance. Aiming at increasing network coverage, the authors in [12] proposed a potential-field-based approach to deployment, which does not require model of environment or centralized control. In [16], the authors assumed there were virtually attractive and repulsive forces among sensors. Using these virtual forces, mobile sensor nodes spread throughout the target area with a uniform distribution such that the network coverage rate is maximized. In [17], the authors propose a NSGA-II-based approach to redistribute mobile sensors to achieve full network coverage as well as to eliminate energy hole. In [18], the authors proposed a Voronoi diagram-based distribution model, in which each sensor iteratively calculates its Voronoi polygon to detect the coverage holes and moves to a better position to improve the coverage rate. In [15], the authors proposed three independent algorithms (VEC, VOR, and MiniMax), by pushing or pulling nodes to cover the gaps based on virtual forces. These three algorithms have similar performance in a bounded area, whereas only VEC algorithm can be used in both unbounded and bounded areas. In [19], the authors investigate how to move sensors to some locations while still preserving the degree of coverage under partially controlled placement. In [20], the sensing field was divided into grids, and the sensors moved from high-density grids to low-density ones such that the densities remain constant. However, all the above efforts only concern maximum network coverage and cannot directly apply to ring-based applications.
The self-redistribution to form a ring-based shape is related to a well-studied problem in the field of swarm robotics, such as uniform circle formation [21, 22]. In this problem, very simple robots are required to uniformly place themselves on the predefined ring. The main difference between their work and ours is that, in their work, the energy consumption is not the main research target. Concerning that ring-based shape is important for WSNs, some approaches have also been proposed to build ring-based shape for both static and dynamic WSNs. In [23], the authors proposed a multilevel virtual ring-based framework for wireless sensor network, which can support the peer-to-peer applications for WSNs. However, how to construct multilevel rings among the target area is not considered. In [3], the authors propose a ring overlay construction algorithm by selecting only a subset of sensors for static WSNs. In [6], rings on the basis of relays are also used to eliminate energy hole of WSNs. Assuming all sensors are attached on mobile robotics, the authors in [24] studied the problem of self-deploy mobile sensors to satisfy a ring-based connection. Since the barrier coverage is a typical application of WSNs, the authors in [25] proposed a hybrid Gaussian-ring deployment to provide a higher intrusion detection probability for attacks at the edge of the network. It has recently come to our attention that the authors in [26] have proposed a decentralized redistribution control algorithm to form a ring-based barrier surrounding the region for mobile wireless sensor network. In their algorithm, each node iteratively collects neighbouring information and updates its position using virtual force. The major differences between their work and ours lie however in that, (i) in our work, we intend to achieve a ring-based shape with the minimum moving distance. We have given a theoretical analysis on what is optimal sensor layout to provide a ring-based distribution with the minimum moving distance; (ii) our distributed sensor redistribution algorithm is based on the above optimization analysis and is hence theoretically founded. As will be shown in Section 5, our algorithm requires fewer working rounds and moving distances in achieving a ring-based distribution.
3. Network Model and Problem Formulation
3.1. Network Model
In this section, we present our network model and basic assumptions. Assume that a set of N homogeneous mobile sensors are deployed in a circular area with radius
Definition 1 (ring-based distribution).
A ring-based distribution is a circle among the target area, which starts from an initial random placement on the target area. And after redistribution control, the sensors must lie on a predefined ring in an equally spaced manner within finite time, as shown in Figure 1.
Let the angular coordinate of sensor i be

Since these sensors are distributed along the ring in an equalized way, as shown in Figure 1(a), the angle between any two nearest neighbor sensors can be calculated as

Define the angle between sensors i and j as

If all sensors form a ring-based distribution and sensor j is the sensor i's nearest neighbor, we have

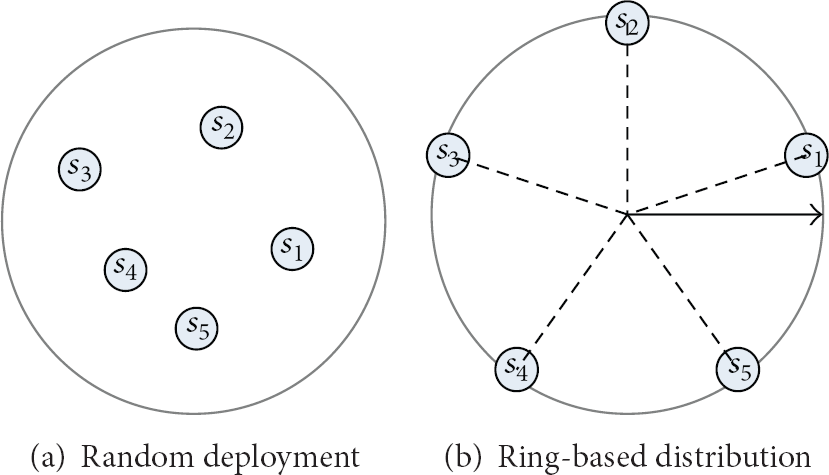
Random deployment and ring-based shape.
3.2. Problem Formulation
As sensors are randomly deployed, the initial distribution may be distributed along the predefined ring with random offsets. Our movement control for ring-based distribution mainly focuses on moving these deviated sensors to the ring. To avoid consuming much energy during the moving process, the movement distance should be reduced, to efficiently utilize network energy and extend network lifespan.
Define the coordinate in

Here, we assume that all sensors move to their final location with no oscillation. However, if one sensor moves to its final location with oscillation, the eventual moving distance is larger than
Definition 2 (optimal movement control for a ring-based distribution).
Let all sensors be first randomly deployed with the initial coordinates
3.3. Optimal Redistribution
Similar to [24], we assume that when sensors are randomly located on the ring
Theorem 3.
Let the initial randomly deployed sensor set along the predefined ring be
Proof.
Let the total distance on misordering movement be
Without loss of generality, for two initial deployed nodes i and j, where
In this case, if misordering of these two nodes happens, we have

If no misordering happens, we have


In this case,

In this case,

In this case,

In this case,

In this case,

In all these cases,
4. Distributed Movement Control
Theorem 3 implies that there exists an optimal solution for the ring-based distribution when the final layout still preserves the initial order of angular coordinates. Now, the next issue to be addressed is how to remove nodes from a random layout to form such an optimal layout. Due to the uncertainty of deployment, some sensor nodes may deviate from the predefined ring with radius

Moving to the ring.
When all the sensors are lying on the ring, these sensors implement distributed moving control along the ring. The basic idea of moving sensors along the ring is to adjust the angle between any two neighbours to
4.1. Starter Generation
The process of moving sensors along the ring commences by randomly selecting some sensors as the starting node. In our paper, any node whose residual energy exceeds a predetermined power threshold
4.2. Neighbour Moving
After the starter node gathers information from all its neighbours, it generates a moving message and moves its neighbours to form a perfect layout. The moving message is an array of
After moving the first nearest neighbour to the optimal location, the starter continues to move its current nearest neighbour to the optimal locations. When the angle between the starter and its current nearest neighbour equals
As for an ordinary node, anytime when hearing messages from one starter node, it will wake up from the wait state. Then, the ordinary node first decides the type of the received message, and the following situations are executed: if the received message is a starter-acting message, the reply messages will be sent to the starter node; if the received message is a moving message, the ordinary node will move to the desired location, and additional movement adjustment will be executed if needed; if the received message is a token message, the ordinary node will become a new starter and will start moving its neighbours to optimal locations.
The detailed procedure for the execution of a starter node is shown in Algorithm 1. In summary, there are four messages used in our algorithm, including starter-acting message, moving message, token message, and reply message, where the last message is transmitted by ordinary node, and others are transmitted by starter node. A node acts as a starter only in one of the two following cases: (i) a node is a starter one which is generated in starter generation execution; (ii) a node is an ordinary one and hears the token messages from its previous starter.
Step 1. //energy decision Select a back off timer Step 2. //back off Act as starter node and broadcast starter-acting message; Step 3. Receive reply messages from ordinary nodes and gather the information of all its neighbour sensors; Step 4. Broadcast moving messages and move neighbours; Step 5. //token passing Broadcast token messages and pass the token to the nearest neighbour sensors; Step 6. Act as an ordinary node; Step 7. Set its state in wait state;
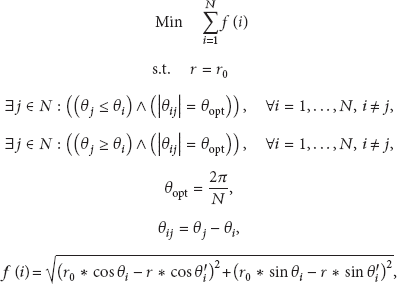
Figure 3 shows an example of the execution of the first two activities. Figure 3(a) depicts the initial configuration, with 4 sensors randomly located on the predefined ring, and sensor

An example of starter generation and neighbour moving.
Theorem 4.
The sensor redistribution algorithm can terminate within a finite time and achieve a perfect uniform layout along the ring.
Proof.
In order to prove the theorem, it suffices to prove that, once the algorithm reached the stable state when the angle between any two neighbour sensors equals
Let S denote the set of sensors distributed in the ring. After reordering these sensors according to the angular coordinate, we rename S as (

Define

Based on the above definition, if all the sensor nodes are distributed in an optimal layout, we can get the upper bound for
Now consider the change of Node i is a starter, and the nearest neighbour is in its communication radius. Assume that node Node i is an ordinary node, and the current starter is its neighbour j ( while
Since If i is an ordinary or a starter node with



Apparently, in all the cases,
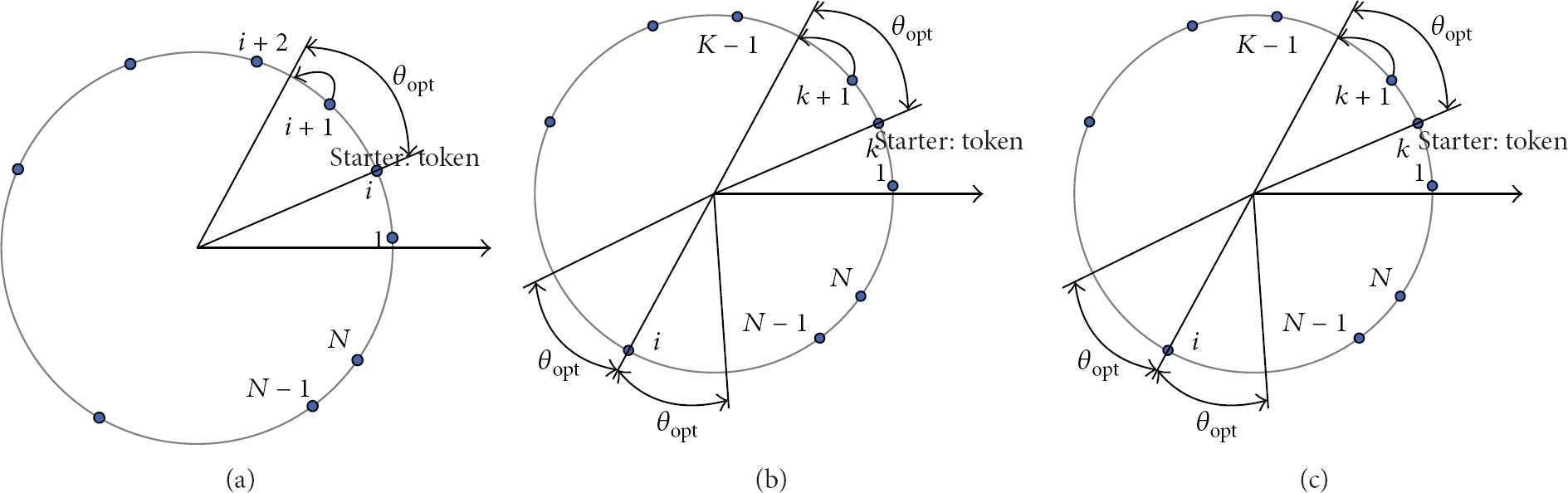
Illustration of node distribution in one working round.
4.3. Multiring-Based Distribution
Define the distance between any two neighbour sensors as

Select Move these nodes straight to update Applying our distributed algorithm to form a ring based distribution for ring Select Move these nodes straight to and update Applying our distributed algorithm to form a ring based distribution for ring
5. Evaluation and Experimental Results
In this section, we will present the simulation results of our algorithm. All simulations are executed in Matlab 7.0. Two metrics, including the average moving distance and algorithm convergence time (measured by the working rounds), are imported to evaluate the performance of the proposed algorithm. Here, the working round is calculated by the number of tokens totally passed. And similar to sensor movement in [26], we further assume that all sensors move to the desired location along the ring simultaneously, and the moving speed is not considered in our paper.
At first, 20 mobile sensors are randomly deployed around a predefined ring

Illustration of network distribution in different steps with random deployment on the area.
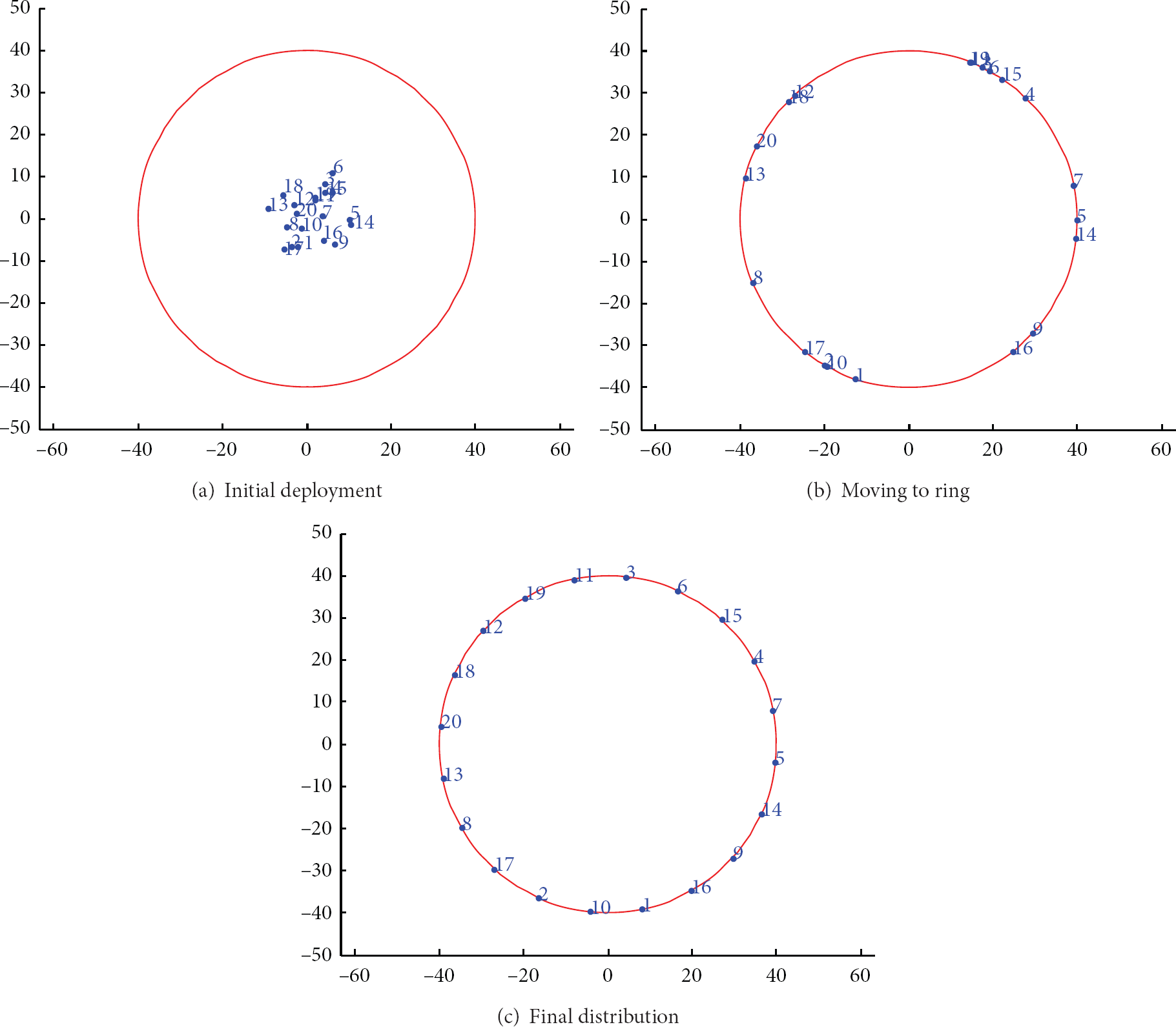
Illustration of network distribution in different steps with random deployment on a compact region.

Illustration of forming multiring distribution in different steps.
Considering that some application may require sensors to form multiple rings among the target area, such as to form a full coverage or form a multilevel barrier, we also test the performance of our algorithm in forming multirings. In this simulation, we randomly deployed 81 sensors among a circular area with radius 100, and each sensor has a fixed sensing radius of 25. In order to form a full coverage of the target area, we first divide the target area into 4 equal-spaced coronas with radius 25 and calculate the desired number of sensors for rings
We further randomly deploy 20, 40, 60, 80, and 100 mobile sensors around the predefined ring. The average moving distance and convergence time with different number of sensors are shown in Table 1. From Table 1, we can see that smaller moving distance can be achieved when the number of sensors increases; this is mainly because the more the number of sensors deployed is, the smaller the optimal angle can be calculated, thus reducing the moving distance. And we also can find that the convergence time almost has a linear growth with the increase of deployed sensors, which is mainly because the movement control is executed in a distributed manner, which can ensure scalability when the number of sensors increases.
Comparision of average moving distance and convergence time.

Considering that the BR algorithm proposed by [26] also intended to form a ring-based distribution for a target area, we further randomly deployed 50 mobile sensors around predefined rings with radius of 50, 60, 70, 80, and 90 and compared our algorithm with BR algorithm.
Figure 8 demonstrates the comparisons of average moving distance. With simulation results in Figure 8, we can find that the average moving distance is increasing as the radius of the ring becomes larger for both BR and our algorithm. Since in our algorithm all sensors are moving along the ring with no oscillation, our algorithm can minimize the moving distance during the process of movement control. However, the movement under BR is based on the virtual force among the neighbour sensors, the sensors may be moving along some place with oscillation, and the resulting moving distance is much longer than our algorithm. Figure 9 depicts convergence time with a different radius of the ring. Since in our algorithm the total covered angle of the ring increases with the working round, the working round for convergence is more than that of BR algorithm, which verifies the effectiveness of the proposed algorithm, as shown in Figure 9.

Performance comparison of average moving distance.

Performance comparison of convergence speed.
6. Conclusions
The problem of autonomous movement control to form a ring-based distribution by mobile sensors is addressed in this paper. We propose a fully distributed movement control algorithm for mobile sensor network to form a ring-based distribution with minimum moving distance. The algorithm was theoretically developed and only requires interaction of the closest neighbours of each sensor. Simulation results show that our algorithm has a good scalability and can converge to the optimal distribution rapidly. It can also be widely applied to different initial states such as random or arbitrary deployment. As part of our future work, we will implement our algorithm in real testbed and examine the performance of our algorithm in more complex environments.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the National Natural Science Foundation of China under Grant no. 61173153 and no. 60903159; the National Science Foundation for Distinguished Young Scholars of China under Grant no. 61225012 and no. 71325002; the Fundamental Research Funds for the Central Universities under Grant nos. N110404014, N110318001, N110204003, N100218001, and N120104001; the China Postdoctoral Science Foundation funded project under Grant no. 20110491508 and no. 2012T50248; the Specialized Research Fund of the Doctoral Program of Higher Education for the Priority Development Areas under Grant no. 20120042130003; the Specialized Research Fund for the Doctoral Program of Higher Education under Grant no. 20110042110024.