
Abstract
In VANET (vehicular ad hoc network), RSUs (road side units) have limited coverage and high deployment cost, so they are deployed sparsely in urban area, which leads to blind zone (BZ) between adjacent RSUs, where vehicles cannot connect to Internet by RSUs. In this paper, we study how to use RSUs and vehicles to download big files cooperatively in BZ. In order to choose the cooperative vehicles with minimum total delay, we propose a sequential decision vehicle selection method based on the residual file (SSRF). The method divides the process of selection into several stages and selects cooperative vehicles from the candidates; the decision sequence generated by SSRF determines the set of cooperative vehicles. Simulation and data analysis show that our method is effective in terms of delivered ratio and file delivered delay.
1. Introduction
VANET is a type of mobile ad hoc networks consisting of vehicles and RSUs. As the deployment of RSUs, many recent researches use 802.11p standard to realize interaction between vehicles and Internet by RSUs [1]. The typical interactive information includes not only road condition and traffic safety text information, but also multimedia files. In VANET, RSUs have limited coverage range and high deployment cost [2, 3], so they are deployed sparsely especially in out-of-hotspots, for example, residential areas and industrial parks, which leads to the existence of BZ between RSUs. In addition, vehicles with high mobility and frequent network topology change [4] make it difficult to maintain uninterrupted Internet access via RSUs. This is especially critical when they want to download big files. In urban VANET, road topology is more complex. So the scenario with two-way road and double crossings is studied in this paper. We aim to reduce the delay of downloading the whole big file (called the total delay) by making full use of two-way vehicles. The interactive protocol between RSUs and vehicles is 802.11p standard [5]. Here, we use the two-way vehicles to help the downloading vehicle (De for short) download big file. It is natural to use the vehicles with the same direction as De, because they have enough time to forward part of the big file. It is also possible to use the reverse vehicles, since the link duration time is more than 11.25 s (based on a maximum speed of 80 km/h and transmission range of 250 m), so they also have time to forward cooperatively under the 802.11p standard [6, 7]. As shown in Figure 1, when De leaves the coverage of RSU1, the communication between two RSUs by Internet will distribute the rest of the big file to the vehicles between them with the same and reverse direction as De such as vehicle 1 and vehicle 2 to help De to download the file. The selected vehicles use store-and-forward mechanism [7] and deliver the part of big file to De by opportunistic contacts. Therefore, the most important issue in the cooperative downloading is how to select the appropriate vehicles to reduce the total delay.

Vehicles store-and-forward in BZ.
Sequential Decision Problem (SDP) is composed of multidecision stages related to time order, which adapts to the dynamic joining and leaving of vehicles. A target solution for each stage will be obtained by SDP. However, we mainly consider the residual file in this paper, so an improved SDP method called SSRF is proposed in Section 4. The earlier the link that between cooperative vehicles and the De starts, the earlier the big file can be delivered. The shorter link duration time may lead to more frequent handover. Therefore, the link start time and link duration time between the De and cooperative vehicles are the primary factors to consider. In other words, the link start time should be close to the link end time of the last cooperative vehicle and the file block size carried by the selected vehicle should be as large as possible. In the proposed SSRF, the selection process is divided into several stages, and the generated decision sequence is exactly the cooperative vehicles.
The rest of the paper is as follows. Related work is presented in Section 2. Section 3 gives the model description. Section 4 presents the proposed SSRF method, and the performance evaluation of cooperative vehicles in urban scenarios is reported in Section 5.
2. Related Work
A number of cooperative mechanisms have been proposed in VANET: Mob-Torrent was presented in [8], which uses 3G network, where the AP (Access Point) prefetched data to mobile helpers. Therefore the total amount of data transferred is increased. In [9], a DC-ARQ mechanism to reduce packet losses in transmissions and a carry-and-forward method to improve delivery of information were proposed. Cooperative distribution of safety information in highway VANET was studied in [10]. The DSRelay in [11] proposed vehicle selection algorithm in highway VANET to ensure the connection probability, but it had long delay. The typical cooperative download schemes in [8–11] considered the highway VANET scenario without complex topology and changeful vehicle behaviors, which was quite different from urban VANET. All [8, 9, 11] only consider undirectional vehicles to cooperative download and cannot take full advantage of two-way traffic, especially in the urban VANET. In recent years, some works studied transferring big file by stopped vehicles [12, 13], but parked vehicles were limited by power and other factors.
Our study is different from the work listed above in two points. (1) Different scenario: we study the scenario of two-way road with double crossings. Complex topology and changeful vehicle behaviors are different from highway. (2) Different objects: in urban VANET, the road is mostly two-way. Although vehicles moving in the same direction may have longer link time, they cannot ensure their connection with De. Reverse vehicles connect to the destination vehicle with probability 1, but the link time may be shorter. Therefore, we take full advantage of two-way vehicles.
3. System Problem Formulation
3.1. Problems and Assumption
In VANET, there are three types of communication: RSU-RSU, Vehicle-RSU, and Vehicle-Vehicle. Internet is the resource provider and the bridge of communication among RSUs [14]. The assumptions in our model are as follows: (1) by using GPS technologies, accurate information (speed and location of vehicles) can be achieved (error < 1 m) [15]; (2) energy consumption and computation resources are enough in VANET; (3) vehicles and RSUs can build connection and transfer and download file once they move into each other's coverage. Figure 2 shows that De moves from RSU1 to RSU2, and it downloads part of a big file when traveling across the coverage of RSU1 quickly. Then, RSU1 will choose some vehicles as candidates from straight-moving vehicles (e.g., b) and right-turning vehicles (e.g., c); RSU2 chooses candidates from straight-moving, right-turning, and left-turning vehicles e, d, and f as well. The goal is to guarantee the successful delivery to De. RSU1 does not use the left-turning vehicle a, because the traffic light will reduce the probability of a meeting De. The key problem we should solve is that how to reduce the total delay by designing a series of analysis and algorithm, in order to guarantee the file delivery. To achieve this purpose, we assume that each vehicle will register information (

System scenario with double crossings of two-way vehicles.
3.2. Channel Model
In this paper,

4. Select Cooperative Vehicles by SSRF
4.1. Selection of Candidates
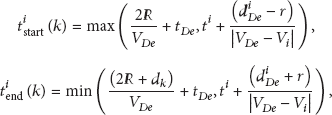
The key to select candidates is to know in advance, whether one or more vehicles currently within the coverage of the RSU will meet the target De. Since network topology changes fast and the effectiveness of the historical data cannot be guaranteed, in order to select the reliable candidates, we should combine historical and current data. In addition, it is difficult to keep a constant velocity for each vehicle during the driving, so it is not accurate to take the registered velocity as the velocity of vehicles driving between the two RSUs. We divide candidates into two classes: vehicles moving after or before the De, which are added into sets Vehafter and Vehbefore, respectively. The candidate selection process ends once De drives out of coverage of RSU1.
There are two scenarios in calculating the distance between vehicles in Vehbefore and De:
straight road:
Right-turning: when De enters into RSU1, any right-turning vehicle i in straight road; then the distance is given by




Also, there are also two cases for the distance between any vehicle in Vehafter and De:
straight road:
right-turning:


The time of right-turning vehicle i in Vehbefore arriving at straight road is

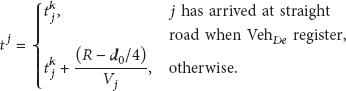
The candidates selected by RSU2 are all to the left of De and oncoming. We ignore the effect of traffic lights nearby RSU2, because the traffic lights in different crossings are not synchronized. Therefore, any vehicle j that can be a candidate should be oncoming and meet De between two adjacent RSUs. The computation is the same as above and

Next, we suppose that the cache of all candidates is large enough for cooperative downloading file. Vehicles have the information (
We use

4.2. SSRF
Cooperative vehicle selection is a dynamic decision process. Vehicles in the set
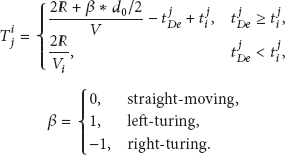
SDP is to find a decision sequence among the decision space, which can optimize target function value. In the model, we assume that
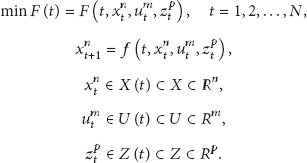
In this paper, we define the size of residual file

Definition 1.
Suppose that there is a structure W is a set of route ω in G, which satisfies the conditions: ω starts from layer Function F is a mapping of set W for feasible solution to solve the problem. That is, for each route ω fulfilling the conditions, we can find a corresponding feasible solution to solve the problem; similarly, it is the same in reverse.
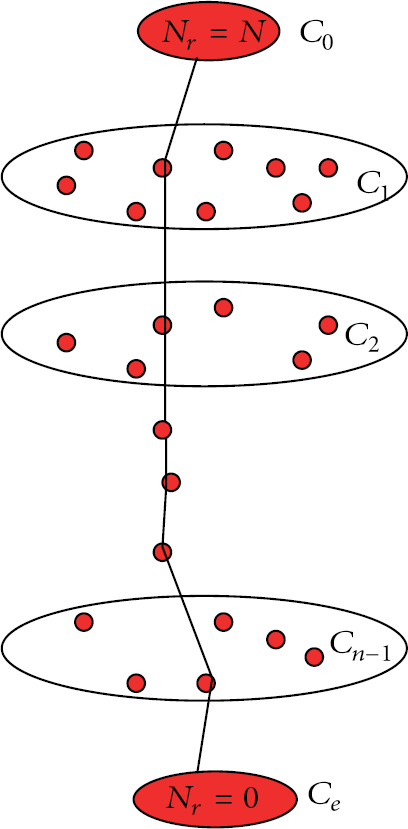
Structure chart of SSRF.
From the definition above we can see that the structural map converts the feasible solution into a kind of path coding. The length of the path in Figure 3 is the target function value of the problem and the minimum delay corresponding to the shortest route
By the previous analysis, as layer

Weighted value analysis between two layers.
In addition, we should consider another case: in the dynamic selection, vehicles entering into RSU later may make up the blank area described above, because selection of cooperative vehicles is dynamic and real-time. Here, we presume that De can receive unordered file blocks.
After selecting node from layer

Transmission blank area.
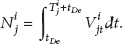
From the above, the value of

Set While Select the minimum one from the lower: Vehicle h is selected as cooperative vehicle: if no overlap {file size vehicle cooperative download for if }else end while
In conclusion, no matter whether the file is downloaded completely or not between the two RSUs, SSRF will reduce the total delay: (1) if the file is downloaded completely before De enters into the next RSU, the set of cooperative vehicles
5. Simulation Analysis
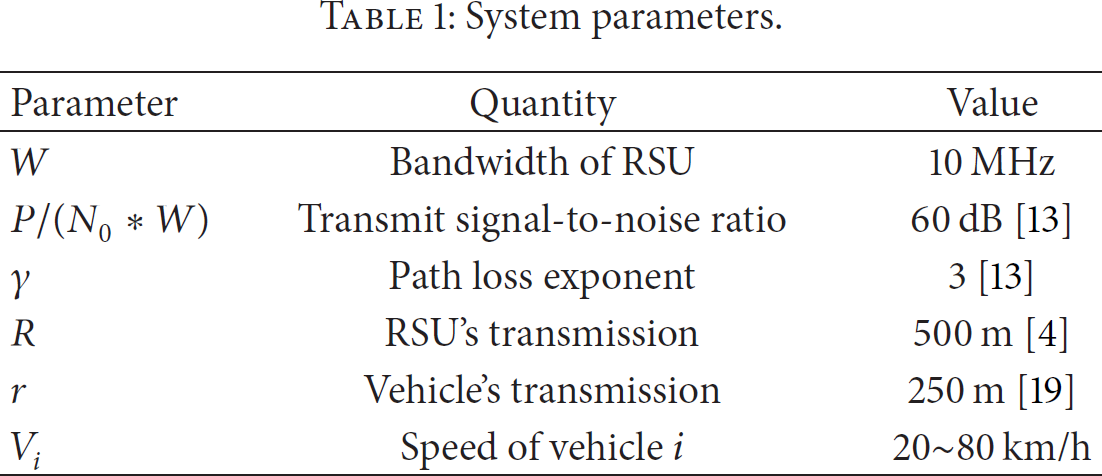
In this section, the real taxi trace data within 30 days in San Francisco from [17] is used. We used the IEEE 802.11p physical layer, which defines an international standard for wireless access in vehicular environments [18]. In the experiments, given that the area of the simulated network is fixed, we use different numbers of vehicles varying between 50 and 250 to represent dense network and sparse network. We do the experiments in two aspects: to prove that our method is reasonable and correct and to compare it with other methods. The parameters are listed in Table 1 and the evaluating metrics are as follows.
The total delay is a metric for evaluating the system performance. The relationship between the number of vehicles and total delay is described in Figure 6(c). With the number of vehicles changing from 50 to 100, the total delay decreases obviously, because there will be more cooperative vehicles as the number of vehicles increases. The total delay remains relatively stable when the number of vehicles is in the range of 100–150. Then as the number of vehicles increases further, the delay has a modest increase. The increased vehicles lead to vehicles moving slowly, so that vehicles must spend more time to meet De. As a result the total delay increases. From the longitudinal analysis of Figures 6(a) and 6(b), we can see the same result as Figure 6(c). To transversely analyze Figures 6(a) and 6(b), we can see that the total delay increases with the increase in file size and distance of BZ. Figure 6(d) proves that the SSRF we proposed has significant advantage. Therefore, under the same condition, our total delay is the minimum. The results of the simulation prove that the SSRF lowers the total delay obviously. The number of cooperative vehicles is shown in Figure 7. Figure 7(a) indicates that the shorter the BZ distance, the smaller the number of cooperative vehicles. It is because on one hand, if the BZ distance is shorter, the number of vehicles we can choose is lower. On the other hand, shorter BZ distance leads to shorter cooperative download time, so the number of cooperative vehicles also reduces. But on the whole, the number of cooperative vehicles does not change too much. The research on the impact of file size and number of cooperative vehicle is studied in Figure 7(b). Obviously, as the size of file increases, the number of cooperative vehicles will increase. Longitudinal comparison in Figures 7(c) and 7(d) shows that when DSRelay chooses the vehicles with the same moving direction, the number of cooperative vehicles is the lowest. It is because the probability of vehicles in the same direction meeting De is small and the link duration time is longer. For the same reason, reverse vehicles will meet De with probability 1 and the link duration time is shorter, so the number increases. However, the SSRF we propose utilizes the characteristics of two-way vehicles. So the average number of cooperative vehicles is between those two other methods. It can be seen from Figure 7(d) that more cooperative vehicles are needed when the file size increases. However, the cooperative vehicles with the same direction can download cooperatively more files, so the number of cooperative vehicles increases slowly in the same case. From the whole data in the figures, it can be seen that the SSRF method considers both lower number of cooperative vehicles and the total delay. In fact, since the selected cooperative vehicles may not meet De or collision with ongoing transmission happens, the delivered ratio will be decreased, as shown in Figure 8. It is reasonable that the more vehicles we can select, the higher the delivered ratio will be. On the other hand, we can see from Figure 8 that our method gets a higher delivered ratio than DSRelay, which proves that SSRF can guarantee the delivered ratio. It is the result of candidates' selection and the number of cooperative vehicles.
System parameters.

Influence factors of total delay.

Average number of cooperative vehicles.
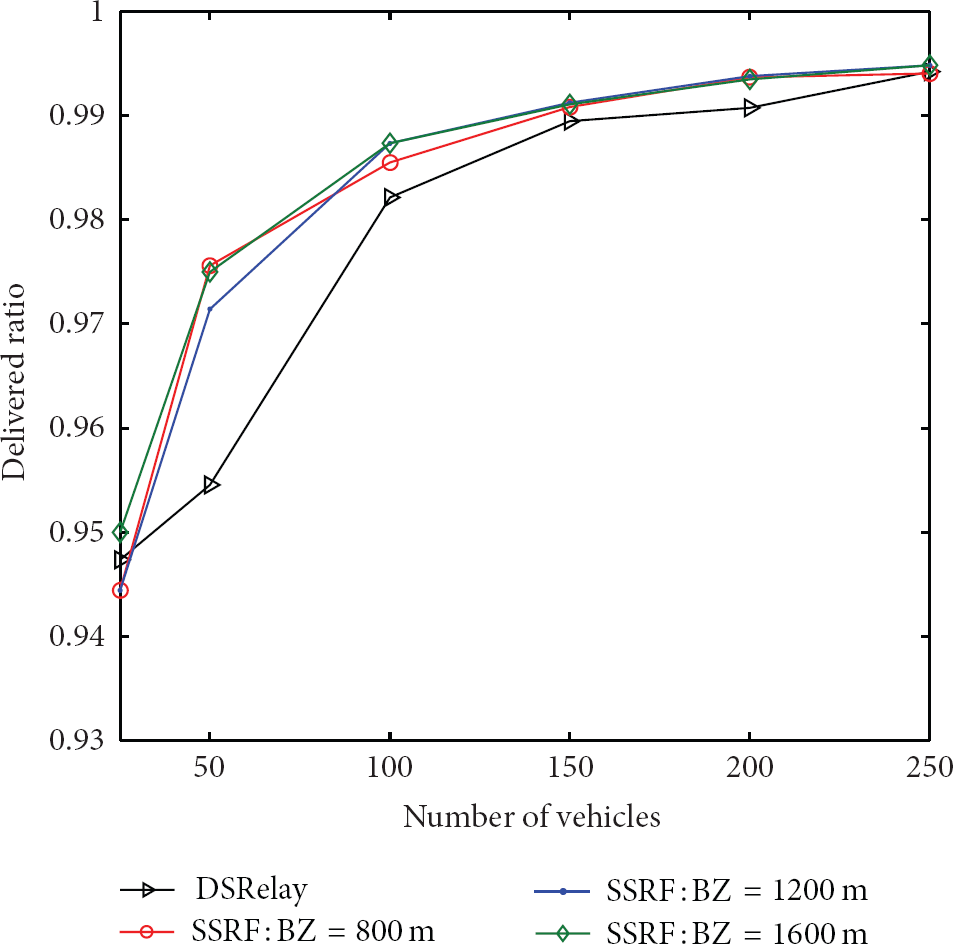
Delivered ratio.
6. Conclusion
In this paper, we mainly study how to take full advantage of two-way mobile vehicles to cooperatively download file in urban VANET with BZ of two adjacent RSUs. We improve the sequential method and propose a SSRF method, which divides the selection process into several stages, and decision sequence generated by SSRF is exactly the set of cooperative vehicles, which reduces the total delay and improves the delivery ratio. In the future work, we will mainly consider the study of multihop relay cooperative download and the management of links between vehicle-vehicle and RSU-vehicle.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by National Natural Science Foundation of China (61370201), the Scientific Research Foundation for the Returned Overseas Chinese Scholars (45), Liaoning Provincial Natural Science Foundation of China (2013020019), and High-Tech 863 Program (2012AA111902).