
Abstract
Leakage monitoring is different from sudden incident monitoring because most of the leakage cases involve a slow process that lasts for a long time. During this case monitoring, sensors suffer long exposure to erosion and may lead to errors in the measurement. An approach is proposed to make use of a soft-decision fusion approach according to the Neyman-Pearson criterion to accumulate auxiliary data from multiple sensors. The proposed method optimizes the soft-function and adjusts its range of sensors, which provide auxiliary data to improve the fusion center confidence for making a global decision. The new method encompasses the collection of useful data and weights and combines them according to the corresponding confidence level to make a global decision. In the simulation case of Rayleigh-distributed observations of leakage monitoring, it is proved that the proposed method has a good performance.
1. Introduction
Multiple-sensor distributed decision fusion is now being used in a wide variety of applications [1–5]. The multiple-sensor approach involves the deployment of the sensor nodes in a monitoring area and the collection of environmental information, followed by processing the information, which is then sent to the appropriate users. At the end of the process, the users can decide what they should do according to the real environmental information. During the process, the decision method achieves optimum performance if all the information has been received at the large cost of communication. To improve the accuracy of the results, WSN may be used to address the unreliable nature of the individual nodes. Therefore, redundant data are inevitable. To enhance the capability of identifying and estimating objects, to refine the transmitted information, and to reduce the energy cost during transmission, data collected from sensor nodes distributed at different locations should be constrained with proper fusion rules.
In dense networks, it is difficult to identify each sensor node in a dynamic network. Thus, not all sensor observations are transmitted directly to the fusion center (FC), where all data are fused by using various approaches [3, 4]. In some methods, the preliminary processing of the observations is performed at each node to obtain binary decisions (0 or 1) [2, 5], called local decisions. Next, the decision would be sent to FC, which makes a system decision according to the local decision. The advantages of performing preliminary processing are reduced communication bandwidth requirements and reduced transmission costs. However, the fusion center in binary decision fusion has only binary partial information, which is not sufficient to show all of the details. The result is a loss of performance in this approach. Some previous studies proposed approaches to address this loss of performance. Zhou et al. [6] proposed decision fusion rules based on multibit knowledge of local sensors. Their work indicates that fusion rules based on the commonly used weight are not sufficient to improve the system performance. The decision rules based on statistics and redundancy are introduced. Thuc and Insoo [7] evaluated the credibility of clusters by using fuzzy logic and took them into account when the final decision is made at the fusion center. By mapping observed values to a set {low, medium, high} and providing a fuzzy inference rules set to make a decision, their works have been found to provide good performance when the SNR is near 0. Aziz [8] proposed an approach known as soft-decision, which is based on the Neyman-Pearson criterion. Instead of using a one-bit hard decision, the approach has each local sensor provide the fusion center with a multiple-bit (soft) decision as local decision. This fusion method improves the performance in the cases of Rayleigh-distributed observations. However, Aziz did not consider the case that no sensor found an alarm situation to be satisfied, even though the sum of soft-decision values exceeds the alarm threshold. In the other situation, according to our experience, we found that the sensors in rough conditions may result in some erroneous values at a small rate, which leads to false alarms. When the latter case occurs, the neighbor near the erroneous sensor is still functional. In our work, a novel soft-decision approach for multiple-sensor networks is proposed. Compared with the previous methods, this approach reduces the effect of the sum of soft-decision values and attempts to find sensors with erroneous values.
The remaining parts of this paper are organized as follows. Section 2 shows the soft-function used in this paper. Section 3 presents the fusion rules based on the soft-function, and its performance is discussed in Section 4. Section 5 provides the conclusion of this work.
2. System Model
The model considered involves a network scene of a leakage monitoring system of WSNs in a coal mine. Sensor nodes of a certain density are deployed in the laneway. Once a node sensor detects gas or water seepage on the tunnel walls, the nodes will send the sensing information to the fusion center via a wireless channel. With the efficiency of multipath propagation and fading in a coal mine, the communication environment is a typical nonideal channel. Because the equipment in a coal mine is periodically checked and the batteries of the nodes are changed periodically, we will take the physical error into account but not the energy cost limit. Most systems depend on a global decision that combines the information of all of the nodes in the event area. Thus, the quantization degree plays an important role in the performance of WSNs.
Because the proposed soft model is based on the fusion of local decisions and global decisions, the system includes three layers: a local sensor layer, transmission layer, and fusion center layer. We consider binary hypotheses:
2.1. Binary Decision Model
On the local layer, in a traditional study, local node

Next, the elements of the local decision vector
On the transmission layer, the local decision vector
On the fusion center layer, the FC makes a final decision

where
2.2. Soft-Decision Model
Binary decision, that is, 0 and 1, at each local sensor is simple to use but cannot present enough information of the scene. To improve upon binary decision, we attempt to allow some sensors to transmit their local decision with auxiliary information to the fusion center. Therefore, the local decision vector
The use of the membership function [8] has a good performance for sending more information to the FC, whereas the soft-decision approach depends on the choice of the function. We do not use the function in [8]; instead, we select the function shown in Figure 1 because the region of
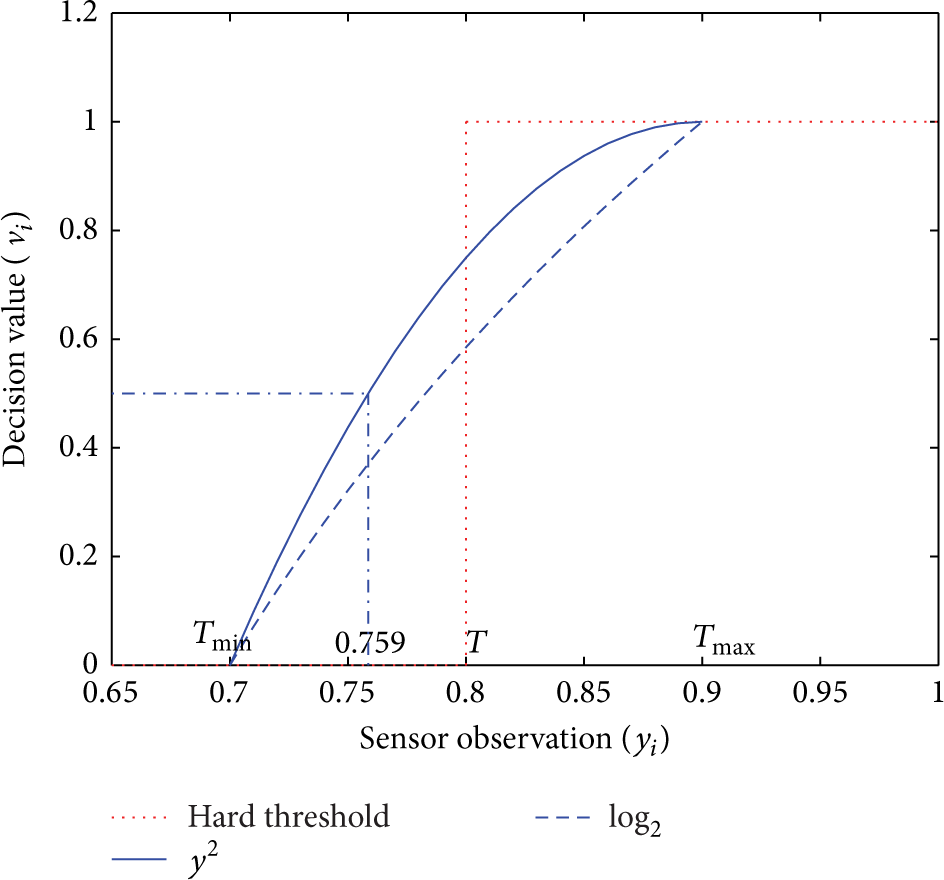
Two soft membership functions.
The membership function shown in Figure 1 can be represented as in formula (3) according to the local sensor observation:
The actual values of

Because the sensor will send more information on the transmission layer, the quantization degree of confidence region is not simple binary bits. Suppose that the sensor i local decision with confidence is presented by l sensor bits,
3. Fusion Rules of the Soft-Decision
Several assumptions should be accepted before we discuss the decision fusion rules. First, all local sensor nodes work independently and have the same capability parameters,
3.1. Quantizing the Local Sensor Decision with Confidence
When the local sensor decides
Definition 1 (quantization level (QL)).
Suppose local sensor i makes the soft-decision
Quantization level is to evaluate confidence level in range

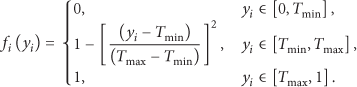
The partition of Ω is
Including the ambiguous observations, the confidence is affected by the neighbors of the sensor. Sensor i's neighbors belong to subset of nodes monitoring the same object with i, and in the geographical location they are very close. According to that, in order to calculate conveniently, we appointed some nodes near a sensor as its neighbors in our simulation. Besides this method, neighbor set can be got in another method based on the spatial and temporal data [10]. If a sensor i knows that its neighbors agree with its submitted value, then one may treat its observation as being valuable.
Definition 2 (auxiliary confidence).
Sensor i and its neighbors undertake the task of identifying the presence or absence of a phenomenon of interest (PoI) and make their local soft-decision based on their own observation. If sensor i's neighbors hold the same opinion (i.e., the PoI is absent or not), sensor i would improve its soft-decision QL. The soft-decision of sensor i is its auxiliary confidence.
Suppose that the number of neighbors of sensor i is m; we denote the confidence coming from each neighbor as

where x is the number of neighbors that hold the same opinions with sensor i; that is, i's neighbors soft-decision value is greater than that of i's. If sensor i has a definite decision, it would have a full confidence of 1. Otherwise, if there is no other sensor that agrees with sensor i, then sensor i will send its observation with a confidence value of
3.2. Decision Rules in the FC
According to the Neyman-Pearson principle, the FC makes the optimal decision using all of the sensor soft-decisions. The likelihood ratio test makes the system Bayes risk the lowest when a single sensor makes its local decision. When more information is transmitted to the FC, more binary bits are used. According to [6, 11], multibits fusion has been taken into account. The fusion rules of multiple-bit decision are also reduced to

where

η is the threshold of the fusion center, which meets a desired GFAP and is set up as a fixed value in many cases. The coefficients
Similarly, the FC combines the soft-decisions of all of the individual sensors in terms of the likelihood ratio test. Because sensor's local decision is supported by its neighbors, FC can decide whether the global decision is trusted based on confidence value.
Theorem 3.
Supposing that each sensor in a network has an average of m neighbors nodes, an auxiliary combiner based on local soft-decision in the fusion center is

where N is the number of sensor nodes and
Proof.
According to [11], the likelihood ratio test of the multiple-bit decision based on local decision is

where V is the vector of the soft-decision and N is the total number of sensors. We assume that there are N sensor nodes in total, in which

For

The global decision statistic will be based on each soft-decision space QL. Next, the global decision statistic is weighted by the sum of the local sensor decision statistic. We can rewrite (12) as
According to formula (7), formula (15) can be rewritten as
Then, substituting (13) and (14) into (16)
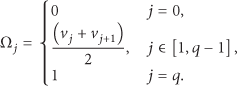
Taking the logarithms in (17), the

where

where

This completes the proof of Theorem 3.
4. Detection Performances
The detection performance of the system can be reflected by the probability of the detection

As an example for the performance study, we assume the case of n sensors with Rayleigh-distributed observations, and all of the nodes have the same local decision rules:

where

According to [8, 12], for a given global false alarm probability at the FC, the corresponding global decision probability is given by

where

Next, we can determine the probability density function of (3) when y is in the ambiguous region [13]:

Therefore, we can obtain the value of
Figure 2 compares the receiver operating characteristics of different fusion methods in the normal environment in which no sensor makes a mistake regarding the local decision. There are sixteen sensors (

Comparison of different fusion rules in the case of 12 identical sensors in the Rayleigh-distributed observation.

Comparison of different fusion rules in the cases that sensors find leakage is not serious or when one sensor makes an error in the local decision
Figure 4 shows the performance of the proposed approach compared with the other approach for different SNR values. This case has the same parameters as those in Figure 3, except for GFAP and SNR. From Figure 4, it is clear that the new method using 2 bits per local sensor decision has a better performance than the method using 3 bits. Therefore, more quantization bits cannot improve the global detection probability. The result is consistent with the conclusion of [8]. Figure 5 shows that the proposed method has a significant improvement when the number of neighboring sensors is small; however, it does not possess a superior increase when the number of neighboring sensors is sufficient (

Comparison of the different fusion rules with different quantization bits.
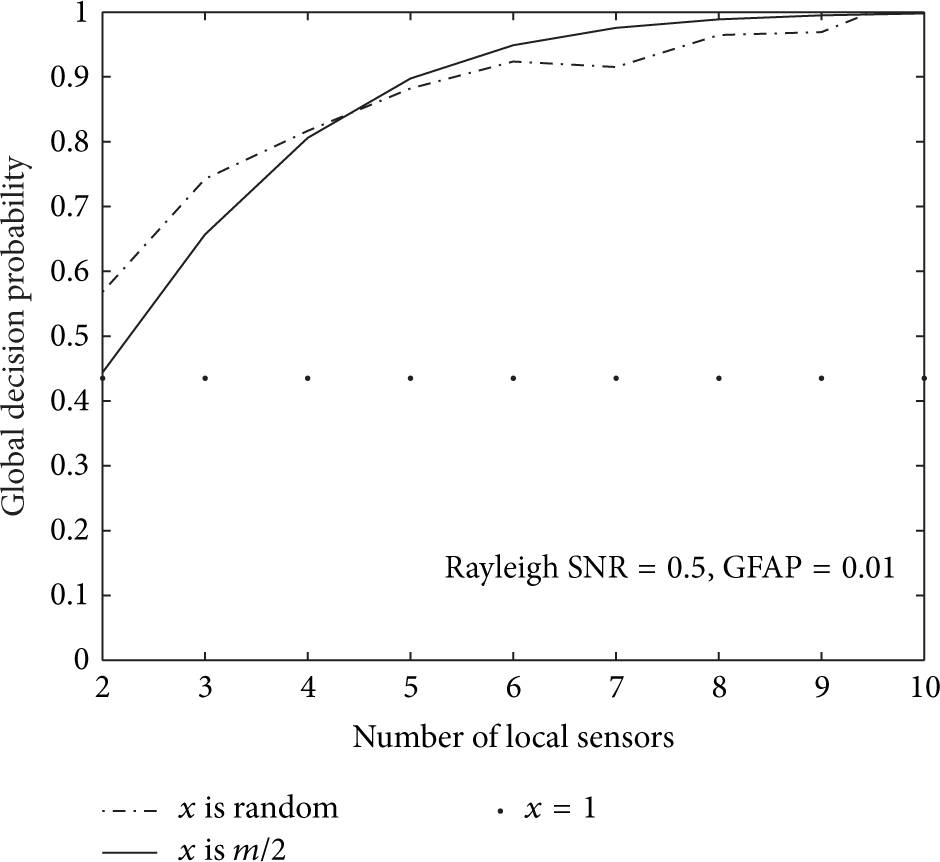
Performances of rules with different numbers of sensor nodes.
5. Conclusion
Fusion rules based on a soft-function can improve the performance of the fusion center. However, the improvement is not assured under some nonideal cases. We discuss such nonideal cases and propose novel fusion rules based on a soft-function and the auxiliary data of a sensor node's neighbors, which supports the global decision. We found that the sensor's neighbors in leakage monitoring can obtain information near the event sensor that indicates an alarm and provides these data to the FC to support the local decision of the event sensor. We investigated this process and made use of a soft-decision fusion approach to accumulate these useful data. The research results indicated the following.
Among all of the sensors, the proposed method based on soft-decision utilizes ambiguous data that is not sufficient to denote an exact local decision to support the global decision. This method was adapted to event monitoring that considered the case that the monitoring event is not explosive and lasts for a long time.
This method based on auxiliary data can enhance the system capability when the numbers of neighbors providing the supporting data are adequate. However, the performance would not increase significantly if the auxiliary data are sufficient.
Our work is based on the assumption that the data obeys a given distribution. This assumption may not be the same as the conditions of a practical application. Further research will further improve its quantization degree [6, 15], which can represent QL by using more bits.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the Project of the National Natural Science Foundation of China no. 51204185, the Project of the China Postdoctoral Science Foundation no. 2012M521147, and the Project of the Natural Science Foundation of Jiangsu Province nos. BK20140185 and BK20140202.