
Abstract
The fruit fly optimization algorithm (FOA) is one of the latest nature-inspired computational models. It has the advantages of having a simple mechanism, fewer control variables, and a fast convergence. However, most applications of the FOA focus on optimization problems in a continuous space. Three-dimensional path planning is a typical discrete optimization problem and can be attributed to multivariable and multiobjective optimization computations. In this paper, we advance an improved FOA model (IFOA) based on engineering techniques. This model is then used to solve for the three-dimensional (3D) path planning of a robot. In a simulation experiment conducted in a virtual three-dimensional space, the IFOA was shown to have a certain capability for three-dimensional path planning. Although the accuracy of the IFOA seems slightly weaker than that of ant colony optimization (ACO), the IFOA may confer time savings of 25% and has greater efficiency. Therefore, this new model still provides a novel and valuable means for solving such discrete optimization problems.
1. Introduction
Generally, the three-dimensional path planning of robot can be defined simply in a given three-dimensional map. It is used to find the shortest path from the starting point to the target location [1, 2]. In the process of stepping forward to the destination, the robots need to avoid obstacles within the three-dimensional space and any locations that are difficult to cross. For example, the general underwater robot can move forward and backward, left and right, and up; however, it cannot jump, as it is hard to climb a very steep slope. Currently, the mature path planning of robots is still in the one-dimensional and two-dimensional field stages.
In three dimensions, the path planning of robot is challenging given the computing complexity, the large required information storage with multivariable and multiobjective constraints, and the difficulty in searching directly for the global optimization path. In engineering applications, three-dimensional path planning has been widely used in devices including mining robots, lunar rovers, EOD robots, underwater robots, and space detectors. Currently, the representative research on the problems of 3D path planning has achieved the following solutions: the A* algorithm, integer programming, the genetic algorithm, the particle swarm algorithm, and the ant colony algorithm [2–6]. However, in searching for the optimal path, the computation of the A* algorithm would be more difficult with an added dimension. The integer programming method attempts to simply transform the 2D path planning framework onto a three-dimensional domain. Given the strict constraint conditions, it is not easy to meet the needs of real environments. The genetic algorithm and particle swarm algorithm have been applied to path planning but have also encountered similar problems. Some scholars have even argued that most research on path planning of robots based on GA and PSO is not completely 3D path planning [7]. Typically, by considering the constraints of the assumed rules, solving the problem of path optimization in a three-dimensional space may utilize sampling, segmentation, rotation, and other methods to discretize the three-dimensional space. Through the discretization of a continuous space, 3D space can be transformed into an observable point set. Due to the capability of concurrent computing and the advantages of rapid convergence, the ant colony algorithm and its improved models have been applied to path planning for an underwater robot [7]. Some related research on path planning in 3D space has reported that the ant colony algorithm and its improved models seem to have a better performance. Compared with other swarm intelligence models, the ACO seems to be more effective for the 3D path planning of a robot [7, 8].
2. How to Transform a Three-Dimensional Space into a Discrete Point Set for Path Planning
To transform a continuous pace into a discrete point set, we can generally construct a cuboid to cover the search area of the robot [4, 8]. For example, assuming the robot is assigned to search a given area of the ocean floor (20 km (length) * 20 km (width) * 1 km (height)) then we can construct a cuboid (21 km * 21 km * 1 km) to wholly cover the assigned ocean floor in three dimensions. Suppose the three-dimensional cuboid can be, respectively, aliquoted into n, m, and l parts in the x-axis, y-axis, and z-axis. In this case, the points in the three-dimensional space can be made into discrete sets of points on two coordinates (Figure 1). Each point has an ordinal coordinate Coordinate_order and position coordinate Coordinate_location, which are shown in
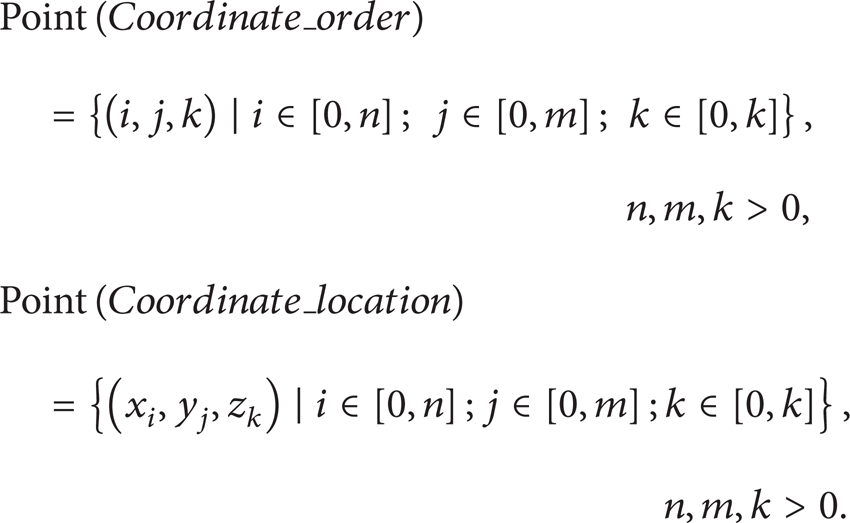

Segment of three-dimensional space in robot path planning.
For ease of calculation, in the following simulation experiments, the serial number coordinates are adopted first. When we need to calculate the distance between two points, the location coordinates are used.
3. The Fruit Fly Optimization Algorithm and Strategies for Improvement
The olfactory organ of the fruit fly can commendably collect all types of floating scents in the air. It can even smell food up to 40 KM away. The fruit fly optimization algorithm (FOA) is a novel global optimization computational method based on the foraging behavior of fruit flies. It was proposed by Pan [9, 10].
3.1. Basic Concepts and Computing Steps of FOA
Inspired by the food searching behaviors of the fruit fly group, FOA is divided into several basic steps [9].
Step 1. Randomized initial fruit fly swarm location matrix:

Step 2. Each fruit fly group is assigned a random direction and distance for the food search:
Step 3. As the food location cannot be known, the distance to the origin is thus estimated first (Dist). Then, the smell concentration judgment value (S) is calculated. This value is the reciprocal of the distance. To solve the problem that value of a smell cannot be negative, some scholars have argued that a modifying factor ∇ S should be added to the smell function. In this way, the FOA could have wider range of applications for global optimization [11]. Consider


Step 4. Substitute the smell concentration judgment value (S) into the fitness function, to determine the smell concentration (Smell i ) of the individual location of the fruit fly:

Step 5. Identify the fruit fly with the maximal smell concentration (finding the maximal value or the minimum value) among the fruit fly swarm:

Step 6. Keep the best smell concentration value (fitness) and the coordinates (X,Y,Z). The fruit fly swarm will then use vision to fly towards that location:
Step 7. Repeat the implementation of Steps 2–5; then judge if the smell concentration is higher than the previous iterative smell concentration. If so, implement Step 6.
3.2. Improvement Strategies for the FOA
Since FOA has been proposed, its applications have emerged gradually. In the past several years, scholars have attempted to apply FOA to such fields as PID parameter controller optimization, the prediction of an electric power load, and the knapsack problem [12–16]. The fruit fly optimization algorithm has certain global optimization capabilities but can also achieve fast convergence in combination with other models, to promote computational efficiency by narrowing down the scope of the optimization space. However, the basic FOA and some modified versions can easily fall into the local optimum in global optimization computations, and the stability of the algorithm must be further promoted [8, 9]. First, because the variable of smell is the inverse of distance, which can be equal to zero when the coordinates of two points are the same, computing the smell will encounter a bug in running the code. In addition, ((6)) is modified to allow the value of the smell concentration (fitness) to be negative [11], but it is functional only when the value of distance D is bigger than 1. Therefore, the modified FOA still has some limitations. To overcome the shortcomings of the MFOA, the basic FOA needs to be modified further, and the modified results are shown in
In ((10)), a revision parameter θ is added, the value of which is always positive. In the real applications of FOA, the parameter θ can be adjusted to be fit for the computation tasks. When choosing the next point, the decision-making rule of FOA is based only on the mechanism of random movement and the distance between the current point and the original point in the coordinate system. Obviously, it is difficult to solve the discrete optimization problem using the traditional FOA. In the latest research related to FOA and its applications, very few articles have considered global optimization in discrete space. Therefore, the strategy of whole random movement should be improved to meet the needs of discrete optimization problems. The decision-making strategies of “choose the next point” or “choose the next position” should be put into the basic FOA. Here, a composite distance is introduced to improve the movement tactics of the fruit fly. The composite distance Dist i is designed to be a linear function related to three distances: (1) between the current point and the next point, (2) between the next point and the target point (if the target point is known), and (3) between the current point and the original point. This is shown in
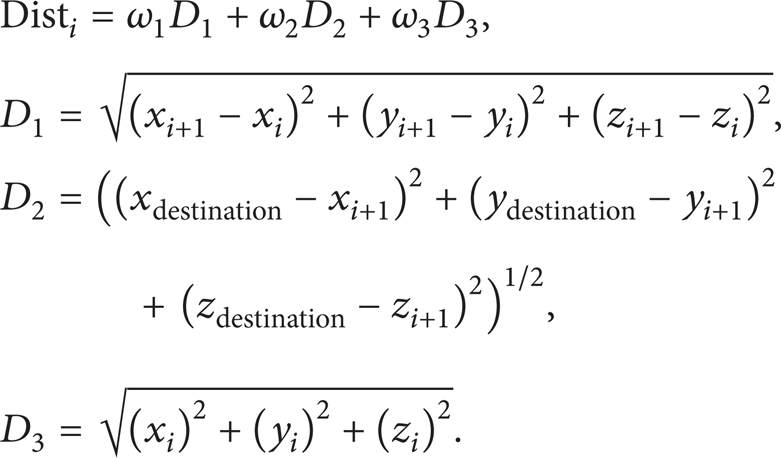
Of course, ((4)) is not the perfect solution. For example, if the target point is not known and the weight of D2 is equal to zero, then the composite distance will lose some important information. However, ((4)) can expand the application range from continuous space to discrete space. In fact, when the weights ω2 and ω3 are assigned values of zero, then the improved FOA can return to the naïve FOA.
4. Visual Neighborhood Constraints of a Robot in Search Space
In general, the movement of a robot can be divided into forward, horizontal, and upwards, corresponding to the x-axis, y-axis, and z-axis of a three-dimensional coordinate system. To simplify the problem, suppose the x-axis is the forward direction. Considering that an underwater robot has a visual field constraint, the maximum observable and movable distance of the three axes can be assumed. Therefore, when the robot is located in a certain position, it can only hunt for the next node within the scope of its limited space. This behavior simplifies the search space and increases its efficiency to some extent [7]. A schematic diagram of this visual constraint is shown in Figure 2.
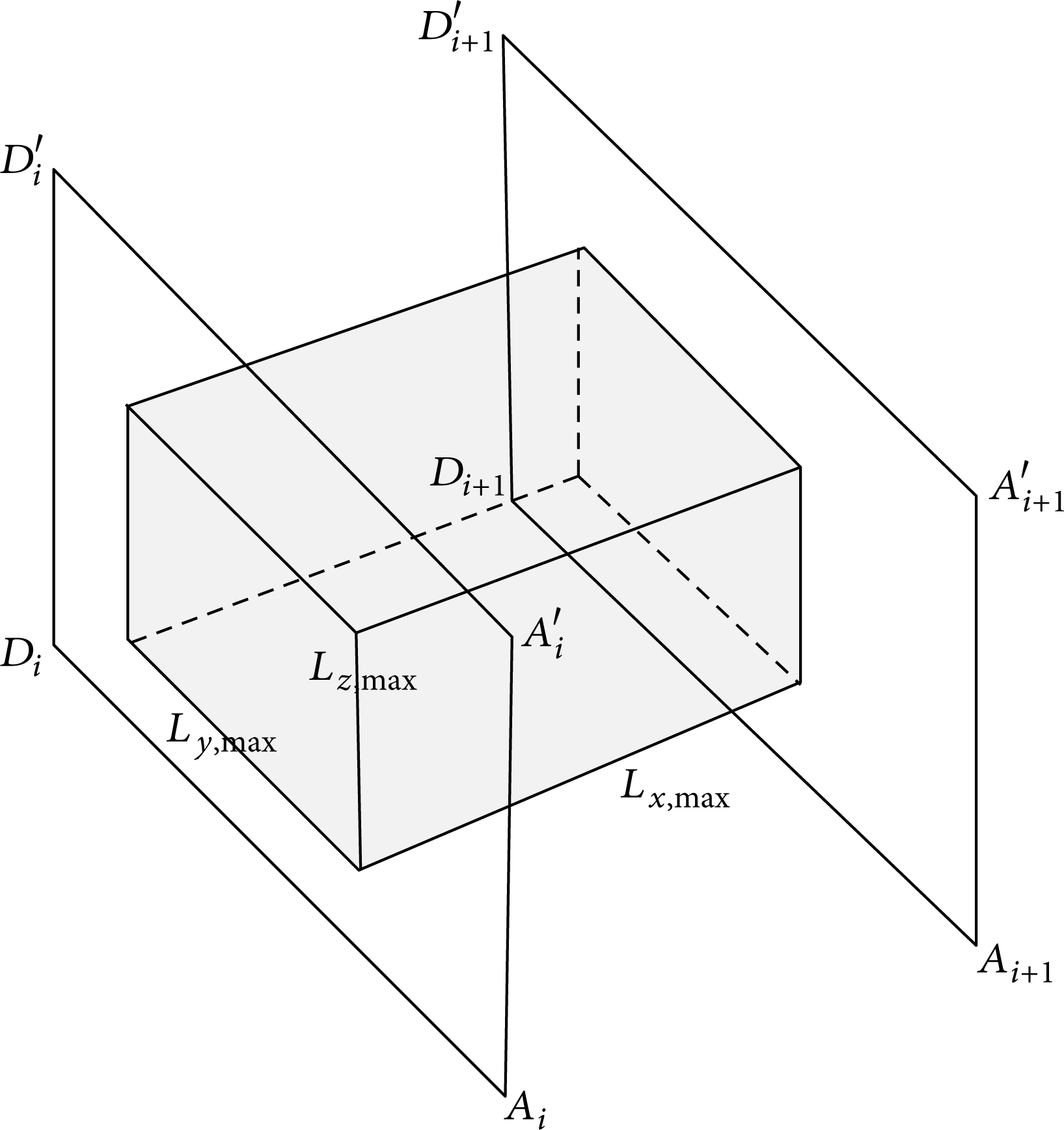
Neighboring visual space of a fruit fly.
In Figure 2, the visual neighborhood constraint narrows down the search space for each of fruit fly group when they need to choose the next point. This constraint is necessary for the robot. For example, the popular AUV (autonomous underwater vehicle) adopted the pedrail system or propulsion system, as the directions and range of robot action have limitations.
According to the visual scope constraint shown in Figure 2, when the fruit flies move to the next point, the neighbor space of choice is shown, given by

To simplify the computation of the 3D path planning, we assume that the fruit fly steps forward with a fixed length in the direction of a single axis. Then, the next point set can be written as

From ((13)), the length of the step in the x-axis, y-axis, and z-axis directions may influence the computational complexity of the FOA. Compared to ((13)), the computing time cost will increase when adopting the whole random movement in three directions. In addition to this, the set size of the visual next points can affect the efficiency of the FOA. These are the common challenges in the 3D path planning of a robot.
5. Improving FOA and Its Simulations in Three-Dimensional Path Planning
5.1. Improvement and Simulation of the FOA Algorithm
FOA is the latest swarm intelligence algorithm. Its advantages include fewer control parameters, lower computational complexity, and the ability for global optimization. Although the FOA has been partially confirmed in extreme optimization and predictive areas, there are some obvious defects. For example, although the FOA has fewer control parameters, it can oscillate when there are multiple local extreme values [11]. Compared to the ant colony algorithm, the FOA has simpler parameters and control variables and lower computational complexity; however, it also lacks the positive feedback mechanism of the ant colony algorithm. The positive feedback mechanism of the ant colony algorithm has been proven to have fast convergence and to improve the efficiency in solving discrete space optimization problems. As a novel nature-inspired algorithm, there are still very few research articles describing solving discrete optimization problems using the FOA. From the biological point of view, fruit flies have better visual systems than ants; thus, they have obstacle avoidance and spatial navigation abilities based on their vision and olfactory sensations. Therefore, they do not need pheromone secretion to strengthen their paths. Thus, the addition of a visual feedback mechanism to the traditional FOA is considered here. Fruit flies have a certain visual ability and can effectively distinguish an unreachable neighboring point. When choosing their next point, they will be influenced by the visible distance between that point and their own position. They will also take into account the food concentration at that point. Therefore, the probability of fruit flies selecting the next point p(next) is

In ((14)), S(j) provides information about the food concentration of the visual reachable point j of the fruit fly, while Visual (j) is the reciprocal of the distance between point j and the position of the fruit fly. ω1 and ω2 are weights, and ω1 + ω2 = 1.
To compare the FOA to the ant colony algorithm, we have chosen a virtual underwater environment from [7] and have used their start and end points for the simulating calculation. A simulation of the underwater environment is shown in Figure 5, and the 3D space of route planning is defined as 20 Km(x) * 20 Km(y) * 2000 m (height). Here, the distance between each node of the x-axis and y-axis is one kilometer, while the node spacing in the z-axis is 200 meters. In Figure 3, the starting point coordinate is Start (1, 10, 4) and the target point is End (21, 4, 5).

The route planning space.
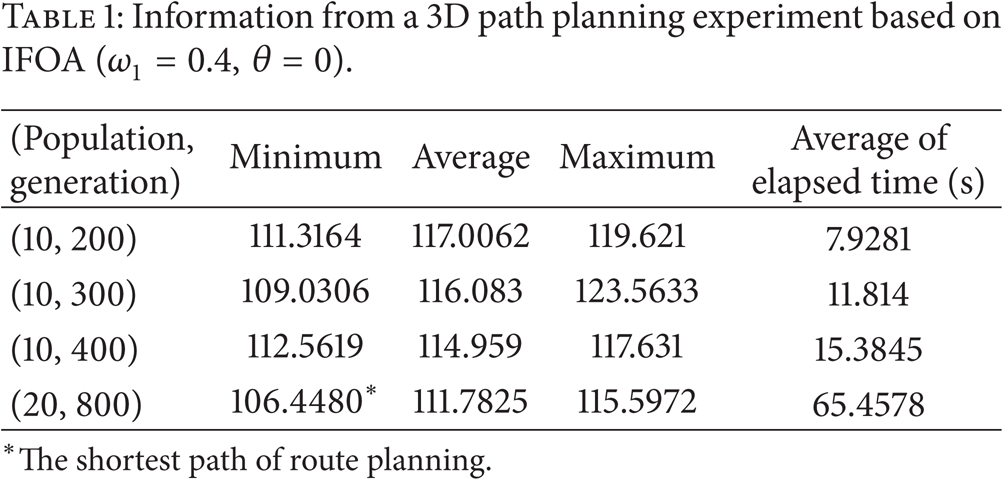
Because the distances in this computation are all bigger than 1, the revision parameter θ can be assigned to zero and ω1 to 0.4 in the simulation experiments. The initial population is 10 and 20, and the iteration times are set at 200, 300, 400, and 800. The simulation tool used was MATLAB7.0, and the hardware environment was core i5, 2.53 GHz, and 2 G memory. The results of this simulation are shown in Table 1 and Figures 4 and 5.
Information from a 3D path planning experiment based on IFOA (ω1 = 0.4, θ = 0).

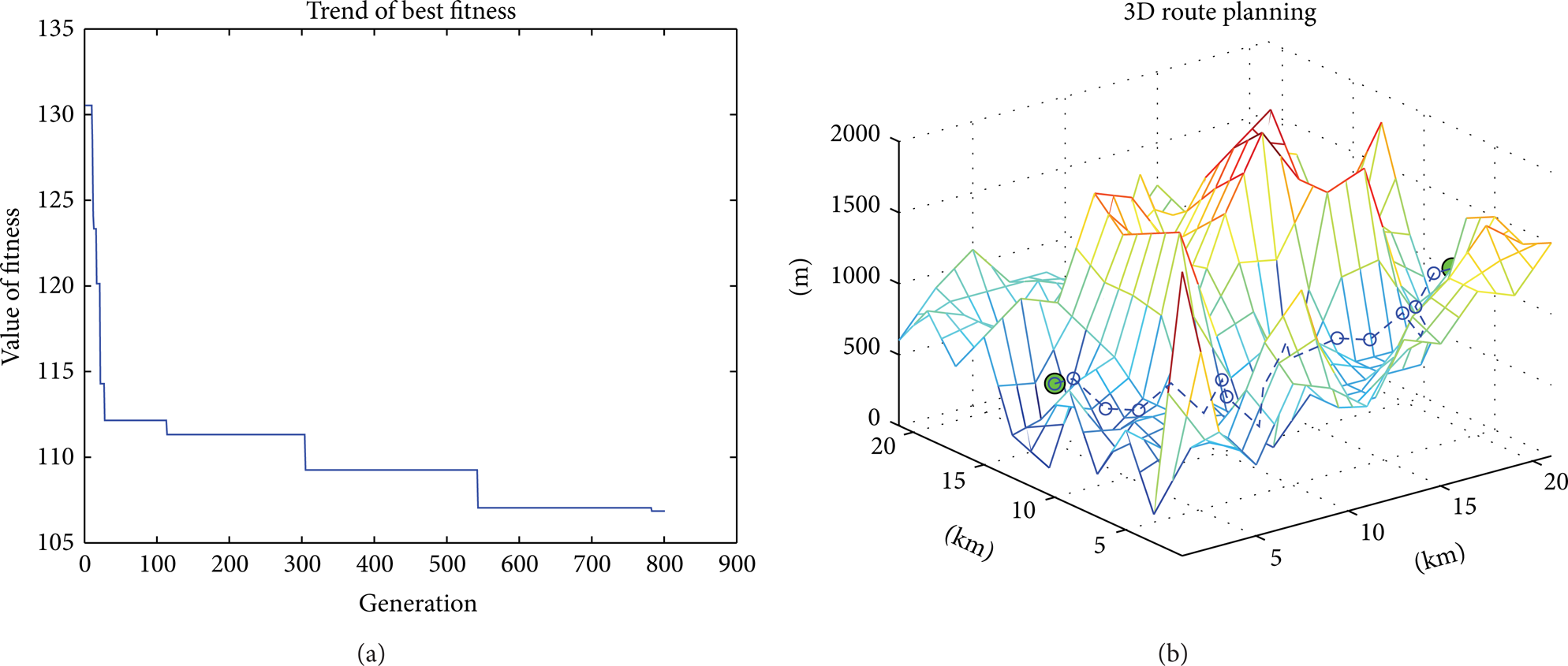
The best result of route planning based on IFOA with the parameters P = 20, G = 800, and ω1 = 0.4.

The best fitness evolution based on IFOA with the parameters P = 20, G = 800, and ω1 = 0.4.
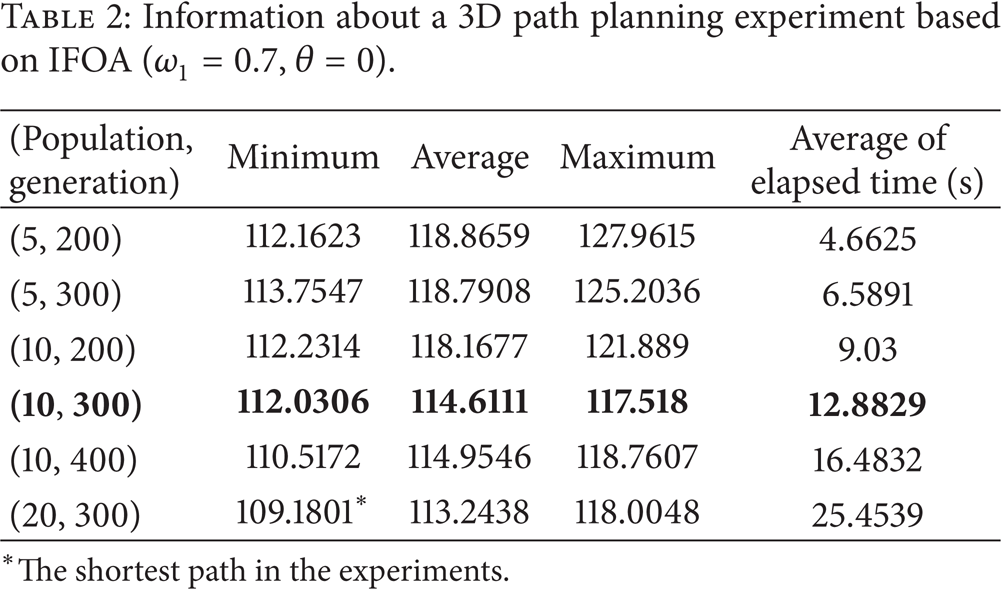
To test the influence of weight ω1 on the efficiency and accuracy of the FOA, the second simulation experiment used ω1 = 0.7, a fruit fly population of 5, 10, and 20, and iteration times (generations) of 200, 300, and 400. The results of this experiment are shown in Table 2 and in Figures 6, 7, 8, 9, 10, and 11.
Information about a 3D path planning experiment based on IFOA (ω1 = 0.7, θ = 0).

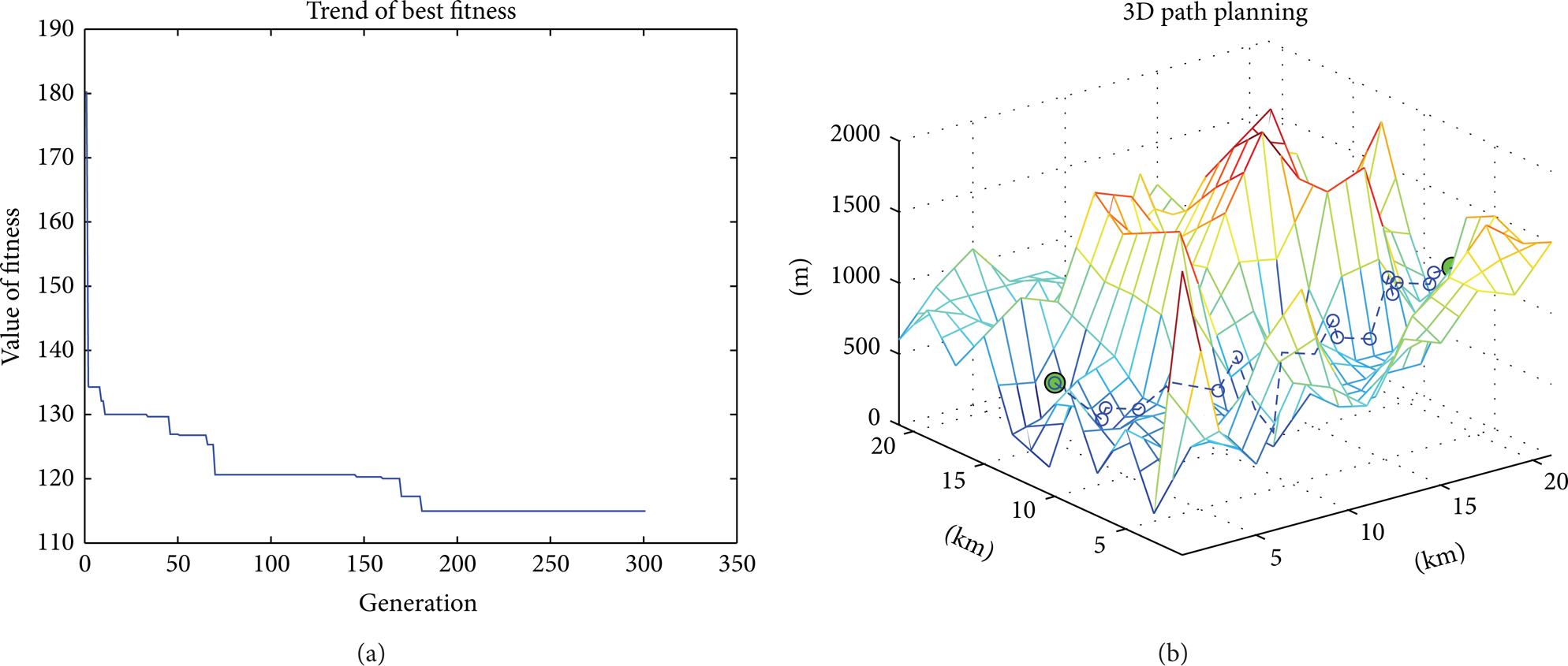
(a) One of the best results with the combination (P = 5, G = 200, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 5, G = 200, and ω1 = 0.7).

(a) One of the best results with the combination (P = 5, G = 300, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 5, G = 300, and ω1 = 0.7).

(a) One of the best results with the combination (P = 10, G = 200, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 10, G = 200, and ω1 = 0.7).
(a) One of the best results with the combination (P = 10, G = 300, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 10, G = 300, and ω1 = 0.7).

(a) One of the best results with the combination (P = 10, G = 400, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 10, G = 400, and ω1 = 0.7).

(a) One of the best results with the combination (P = 20, G = 300, and ω1 = 0.7). (b) One of the shortest paths with the combination (P = 20, G = 300, and ω1 = 0.7).
From the results of the comparison experiments, we can argue that the weight ω1 can slightly affect the accuracy and efficiency of the IFOA. When we enhance the weight of the distance between the current point and the next point, we slightly decrease the accuracy and efficiency. It is thus reasonable that the distance between the next point and the food source seems more important in IFOA. Through repeated experiments, we chose a preferable value combination of parameters for the IFOA: population = 10, generation = 300, and ω1 = 0.4. This combination of parameters was then adopted for the following experiments assessing the ant colony optimization algorithm in the three-dimensional path planning of robot.
5.2. Comparison Experiments among FOA, IFOA, and ACO in 3D Path Planning
Typical applications of 3D path planning using swarm intelligence are based on the ant colony algorithm. Therefore, to analyze the performance of the naïve FOA and IFOA in three-dimensional path planning, the ant colony optimization (ACO) was chosen as the algorithm for comparison [7, 17]. The population of the ant colony was set at 10 and 20, and iteration times were set at 200, 200, 400, and 800. The start point and end point are the same with the IFOA. The results of this experiment are shown in Table 3 and Figure 12.
Simulation of 3D path planning based on the ant colony algorithm (α = β = 0.5, ρ = 0.2).

(a) One of best results of route planning based on ACO with (P = 20, G = 800, α = β = 0.5, and ρ = 0.2). (b) One of the shortest paths based on ACO with (P = 20, G = 800, α = β = 0.5, and ρ = 0.2).
5.3. Analysis of the Simulation Results
Because there is little research on the use of the FOA in discrete optimization, we chose a basic ant colony algorithm as the reference for our control experiments, as this is one of the best intelligent computing models available for discrete global optimization. The detailed results of a comparison based on our simulation experiments are shown in Table 4.
Comparison details between ACO and IFOA, FOA (population = 10, generations ∈ (200, 300, 400)).

From Table 4, we can find that the results of the naïve FOA (basic FOA) are much worse than IFOA and ACO; therefore, we just need to compare IFOA with ACO. According to the detailed experimental data above, “BestFitness” and “generations” are chosen as factors for variance analysis (α = 0.001, tool: spss17.0), and result is shown in Tables 5, 6, 7, and 8.
Test of normality (factor: models).

*This is the lower limit of the true significance level.
Test of the homogeneity of the variances.

Test of normality (factor: generations).
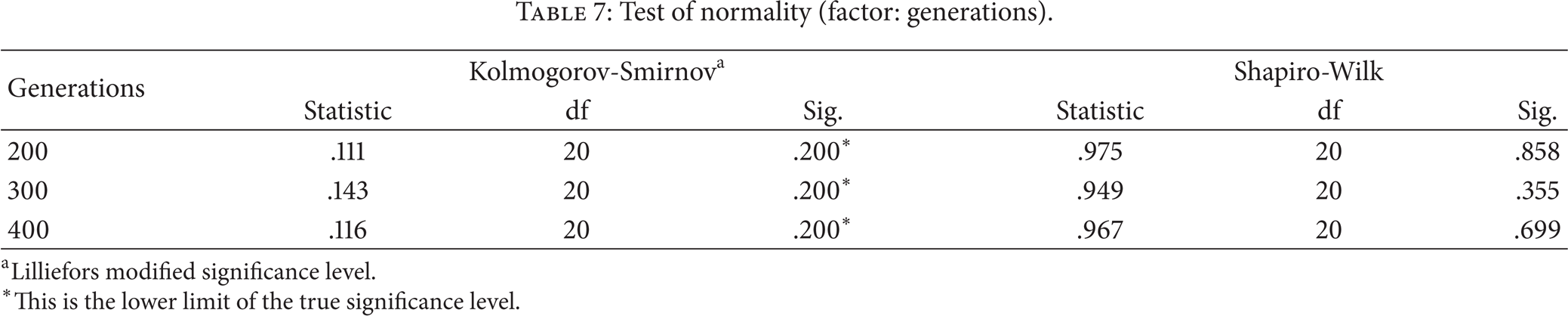
*This is the lower limit of the true significance level.
Test of the homogeneity of variances.

From Tables 5, 6, 7, and 8, both the D-test and the W-test show that the given experimental data obey a normal distribution. Using the test of the homogeneity of variance, we can complete an analysis of the variance (Table 10). The significant test result of the interaction of the double factors is shown in Table 9.
Test of interaction effects among factors.

One-way analysis of variance (factor: models) (α = 0.001).

Analysis of the interactive factors shows that iteration times do not have an obvious influence on the experimental results, illustrating that the two algorithms have a premature convergence problem in the simulation environment. Although both the ACO and the IFOA can eventually find the shortest path in the virtual environment, the ACO seems slightly more accurate and stable (improved variance). Only from the optimization example of the route planning simulation, the gap in the optimization accuracy between two algorithms is not very obvious. Based on the univariate analysis, the zero hypothesis cannot be rejected in a significance level of α = 0.001. This result is beyond expectations.
5.4. Explanation of the Experimental Results
Compared with ACO, the IFOA is a novel nature-inspired computation model. IFOA has the advantages of having a simple mechanism and fewer control variables. Therefore, IFOA has a faster convergence than ACO. The time complexity of IFOA is computed in Table 11.
Time complexity analysis of IFOA algorithm.
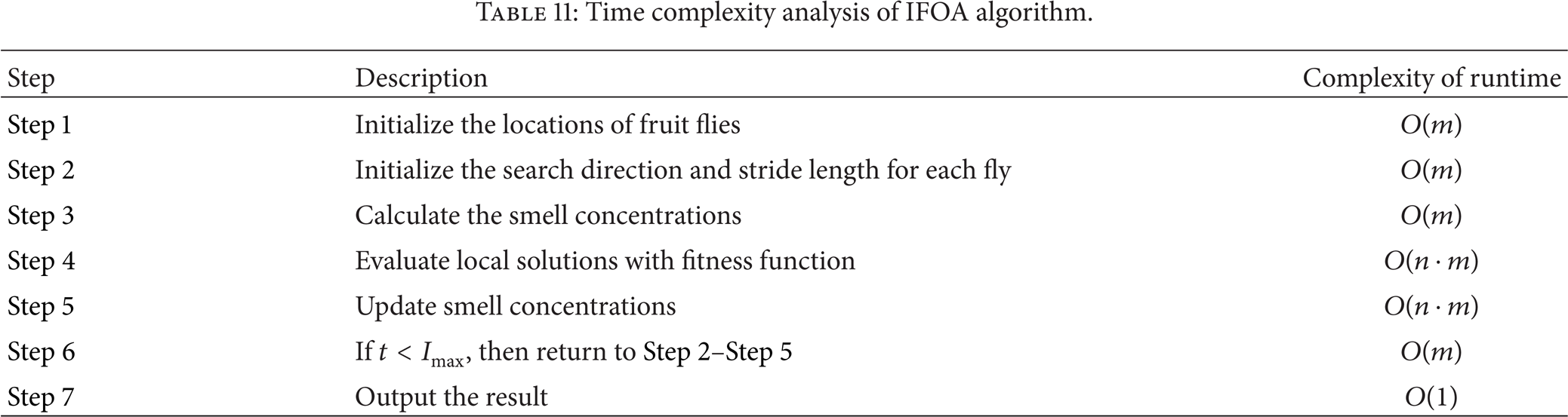
From the basic steps of IFOA in Table 11, it can be seen that after Imax generations, the time complexity of the IFOA can be estimated by the formula

Compared with formula ((15)), the time complexity of the basic ACO is estimated by formula ((16)) [17, 18], and then we can conclude that the IFOA needs much less time than ACO in the same scale computing problems of discrete optimization, for example, TSP or path planning. Consider

Although the novel IFOA has faster convergence than ACO, the IFOA seems to fall more easily into a local optimum and premature convergence, and then the stability and accuracy are weaker than ACO too. The reason depends on the different mechanism of feedback between IFOA and ACO. As we know, ACO has negative and positive feedback through the pheromone trail updating [17], but IFOA has only the negative feedback based on fitness function. Therefore, the convergence of IFOA requires further study. In terms of application, ACO is widely used in many fields and even covered all of the optimization fields, for example, image processing [19, 20], control engineering [18], aerospace [21], and so forth. Relatively, the applications of FOA have the huge space. As a young nature-inspired algorithm, the novel FOA seems like a very simple skeleton, but it may be made into all kinds of crafts [16, 22].
Basically, the path planning problems of robots are still the most important applications involving large-scale, multiobjective, and multivariable optimization problems. Besides the improved FOA introduced in this paper, there are many other solutions with various intelligence computing models. However, three-dimensional path planning problems are still very difficult to solve completely, especially in real decision-making situations.
6. Conclusions
Although the improved FOA is much simpler than the ACO, the estimation accuracies of these two algorithms for this 3D path planning trial are very close. By repeating the simulation experiments over 40 times, the gap of the actual path optimization between the two algorithms was only approximately 2.36% on average, while the time cost of the IFOA model (the improved FOA described in this paper) saved nearly 25%. In terms of the efficiency of the algorithms, we predict that the IFOA may have a shorter running time than the ACO due to structural problems in the latter. The IFOA is better designed for solving discrete optimization problems; moreover, when time efficiency is a key consideration and some accuracy can be sacrificed, the IFOA has more advantages over the traditional ACO.
Traditional nature-inspired intelligent computation models are challenged by large-scale, multiobjective, and multivariable optimization problems; therefore, mechanisms to reduce the computing complexity of those heuristic algorithms represent an important area of study. In addition to a smaller number of control variables and a lower time complexity, the structure of the FOA is concise and can be easily combined with other algorithms or engineering techniques. Of course, as one of the latest intelligent computing models based on swarm intelligence, its stability, convergence, computational complexity, and possible applications in continuous and discrete space optimization must be further explored.
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This paper is partly supported by Fundamental Research Funds for the Central Universities (no. 2013XMS03), Guangdong Province Soft Science Research Project (no. 2013B070206020), and Guangdong Province Key Laboratory Open Foundation (no. 2011A06090100101B).