
Abstract
A fast three-dimensional (3D) node localization algorithm in multipath for ultra-wideband (UWB) wireless sensor networks is developed. The algorithm employs a modified propagator method (MPM) for time delay estimation and then uses a marriage algorithm of 3D Chan and Taylor for range-based multilateral localization and node position computation. In the proposed algorithm, the traditional propagator method (PM) for direction-of-arrival (DOA) estimation is extended to frequency-domain time-of-arrival (TOA) estimation in multipath, which can effectively measure the distance between an unknown sensor node and an anchor node. MPM algorithm requires neither spectral searching nor covariance matrix estimation and its eigenvalue decomposition, which reduces the computational complexity. The marriage location algorithm enhances the robustness and accuracy of node localization. The simulations validate the effectiveness of the proposed algorithm in locating multiple unknown nodes of UWB wireless sensor networks in 3D space.
1. Introduction
Ranging and localization of unknown sensor nodes in wireless sensor networks (WSNs) [1] have drawn considerable attention in many aspects such as environmental monitoring, health tracking, smart home, machine-to-machine (M2M), and body area networks (BAN). In actual environment, the sensor nodes are commonly placed in three-dimensional (3D) terrains, such as workshops, forests, and oceans. Recently, several range-based and range-free 3D node localization algorithms in WSNs have been proposed [2–6]. However, some problems should be investigated in node design and implementation, such as large computational amount, slow executing, and inaccurate localization in multipath and noise. Since the energy and power carried by node equipment are limited, effective methods with low complexity, low power consumption, and good robustness for 3D node positioning are of great significance.
This paper investigates fast 3D node localization problem based on time delay measurement in multipath in ultra-wideband (UWB) wireless sensor networks. As we know, time delay estimation problem has been studied with a variety of super-resolution subspace techniques [7–11], such as multiple signal classification (MUSIC), total least square-estimation of signal parameters via rotational invariance technique (TLS-ESPRIT), and matrix pencil (MP). Compared with the correlator-based methods, subspace-based algorithms can increase time resolution even if the time delay is smaller than a pulse width. Unfortunately, these techniques increase the complexity of WSN implementation. Specifically, in MUSIC algorithm, spectral searching is needed through all the space, which increases its computational time. ESPRIT-like algorithms require the covariance matrix estimation of the observed data using a large number of snapshots and then performing eigenvalue decomposition (EVD) or singular value decomposition (SVD) of it. In [12], we developed a unitary matrix pencil (UMP) based delay estimation algorithm for 3D localization in UWB wireless sensor networks, which can reduce the complexity load. However, its estimation accuracy is lower than many subspace-based methods.
The propagator method (PM), developed in [13], is a traditional subspace method previously used in the direction-of-arrival (DOA) estimation. In [14], we extend it to the time-of-arrival (TOA) estimation. PM algorithm only requires linear operations, and thus it avoids covariance matrix estimation and its EVD or SVD which are the main computational burden in subspace methods. However, similar to MUSIC algorithm, a spectral peak searching through all the space is needed in traditional PM algorithm.
In this paper, we develop a fast range-based 3D node localization algorithm in multipath for UWB wireless sensor networks. The algorithm employs a modified propagator method (MPM) for frequency-domain time delay estimation and then uses a marriage algorithm of 3D Chan and Taylor for range-based multilateral localization and node position computation. The MPM algorithm requires neither spectral searching nor covariance matrix estimation and its eigenvalue decomposition, which can reduce the computational load. Furthermore, the marriage localization algorithm can enhance the robustness and accuracy of node localization in comparison with the previous algorithm in [15]. The simulations validate the effectiveness of the proposed algorithm in locating multiple unknown nodes of UWB wireless sensor networks in 3D space.
This paper is organized as follows. In Section 2, the UWB received signal model for multipath time delay estimation is given. MPM-based multipath delay estimation algorithm is proposed in Section 3. Based on it, the multilateral localization and node position computation using a marriage of 3D Chan and Taylor algorithms are presented in Section 4. In Section 5, the simulation results are given to verify the performance of the proposed method. Finally, a conclusion is drawn in Section 6.
2. Signal Model
Assume that an ultra-wideband pulse is transmitted from an unknown node to an anchor node through L paths. During the qth snapshot,


The channel impulse response of UWB signal in multipath is a sum of L components shifted from the corresponding time delays. Upon discrete Fourier transform and matched filtering based on (2), the frequency-domain representation of the identified channel signal can be written as
Collecting the data of all the Q snapshots from (3) yields an observed data matrix:



The problem interest is to estimate the parameter
3. Multipath Delay Estimation Using Modified Propagator Method
3.1. Review of Traditional Propagator Method
Let us first review the traditional propagator method. The propagator method is previously presented in DOA estimation [13]. We introduce its application in TOA estimation [14].
From (5), it is noted that








3.2. The Modified Propagator Method
The traditional propagator method can reduce computational load compared with the common subspace techniques such as MUSIC and ESPRIT since it uses linear operations on the observed data, avoiding the EVD or SVD of covariance matrix. However, it reveals from (11) that long time is needed for spectral peak searching through all the scope of time delays. To avoid it, we combine the idea of shift invariance with propagator method in the paper, presenting a modified propagator method (MPM) for multipath delay estimation.
Let


Compose the two matrices

From the idea of propagator method, if


Similarly, the matrix


In the noisy environment,

Let

From (23), we observe that


The procedure of MPM-based time delay estimation algorithm can be summarized as follows.
Divide the observed matrix Compose Obtain the propagator Calculate the eigenvalue matrix
4. Node Position Computation Algorithm
4.1. Multilateral Localization
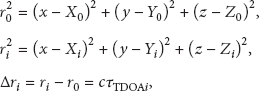
From the results of MPM-based multipath delay estimation given in (26), the

The geometric relationship of 3D multilateral localization with five anchor nodes.
Assume that
Chan algorithm [16] and Taylor algorithm [17] are two traditional methods to solve nonlinear positioning equations for radio location in a 2D space. Chan algorithm has low computational complexity and high accuracy in high signal-noise-ratio (SNR) and Gaussian noise environment. However, with the increase of TOA measurement error, the performance of Chan algorithm in low SNR environment will degrade. Taylor algorithm has higher accuracy and good robustness in noise. However, the performance of Taylor algorithm is highly dependent on the initial estimate of iterative computation. An improper initial estimate will lead to no convergence.
In the paper, we present a marriage algorithm of 3D Chan and Taylor location to calculate the 3D position of unknown node. Figure 2 shows the procedure of locating an unknown node with
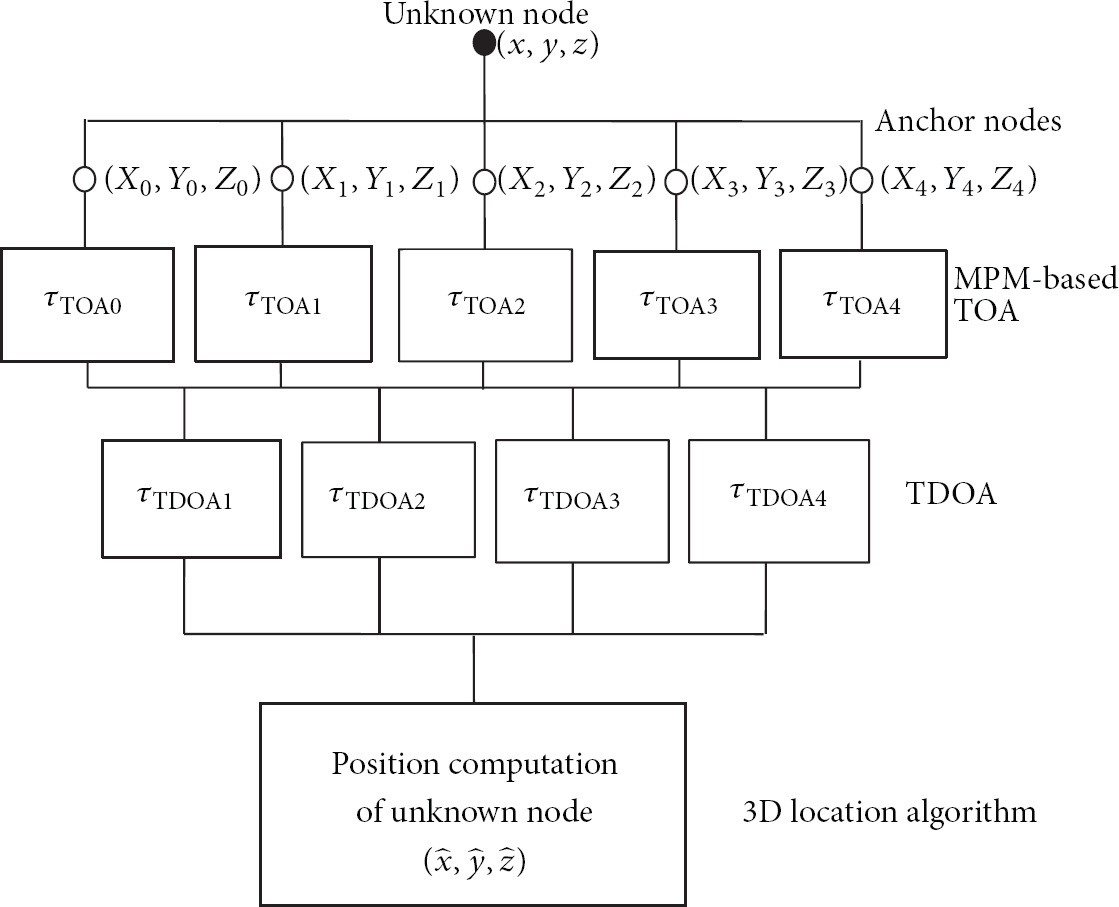
Procedure of locating an unknown node with five anchor nodes.
4.2.
Chan Algorithm
The traditional Chan algorithm can be extended from 2D space to 3D space. From the positioning equation in (27), we have


In (29), since
4.3.
Taylor Algorithm
Similarly, Taylor algorithm can also be extended to 3D space. Starting with an initial estimate

4.4. Marriage of 3D Chan/Taylor Location
Based on the two algorithms mentioned above, a marriage algorithm of 3D Chan and Taylor location is presented to calculate the 3D position of the unknown node. The procedure is as follows. In the first step, 3D Chan algorithm is employed to calculate the estimated coordinate of an unknown node based on (29), denoted by

5. Simulations
In the simulations, the performance improvement achieved by the MPM is presented. Then, node localization accuracy using MPM-based multipath delay estimation and the marriage of 3D Chan/Taylor location is verified.
5.1. MPM-Based Multipath Delay Estimation Results
The transmitted UWB signal (

The transmitted UWB signal and the received multipath superposition signal.
Table 1 illustrates the results of time delay estimation using the proposed MPM algorithm.
MPM-based delay estimation results when SNR = 0 dB.

Figure 4 presents the comparison of root mean square error (RMSE) and run time between the MPM algorithm and TLS-ESPRIT algorithm [10]. There are

Performance comparison between MPM and TLS-ESPRIT.
5.2.
Position Computation Results
In Figure 5, we assume that
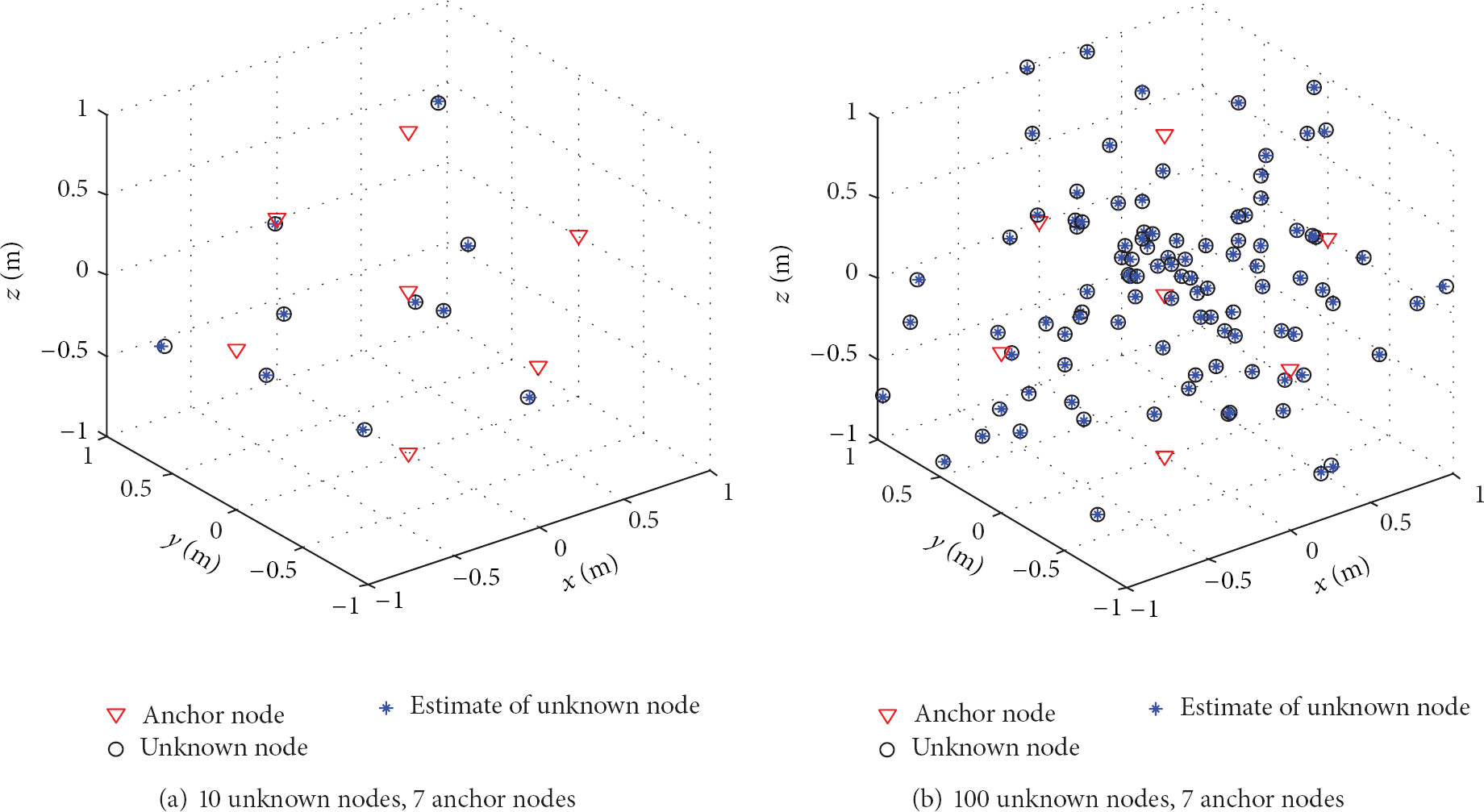
Node position computation result.
The results of 3D position computation of 10 or 100 unknown nodes are demonstrated in Figures 5(a) and 5(b), respectively. The results show that the coordinates of multiple unknown nodes can be effectively estimated with high accuracy, even with low density of anchor nodes.
5.3. Accuracy of the Proposed Algorithm
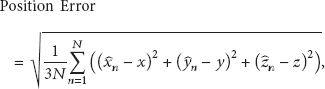
We investigate the localization accuracy and robustness of the proposed algorithm by simulation. The node position error can be calculated by

Position error versus the number of anchor nodes (SNR = 0 dB).
Furthermore, the performance of the proposed algorithm is compared with the matrix pencil based localization algorithm in [12] and the previously proposed localization algorithm in [15], as shown in Figure 7. The simulation results reveal that the performance of the proposed algorithm outperforms the other algorithms. By employing the MPM-based time delay estimation algorithm, the TOA measurement accuracy of our method can be greatly improved compared with matrix pencil based TOA measurement algorithm in [12]. In addition, by the use of the marriage of 3D Chan/Taylor location, the proposed method has better robustness in low SNR compared with the previous algorithm in [15].
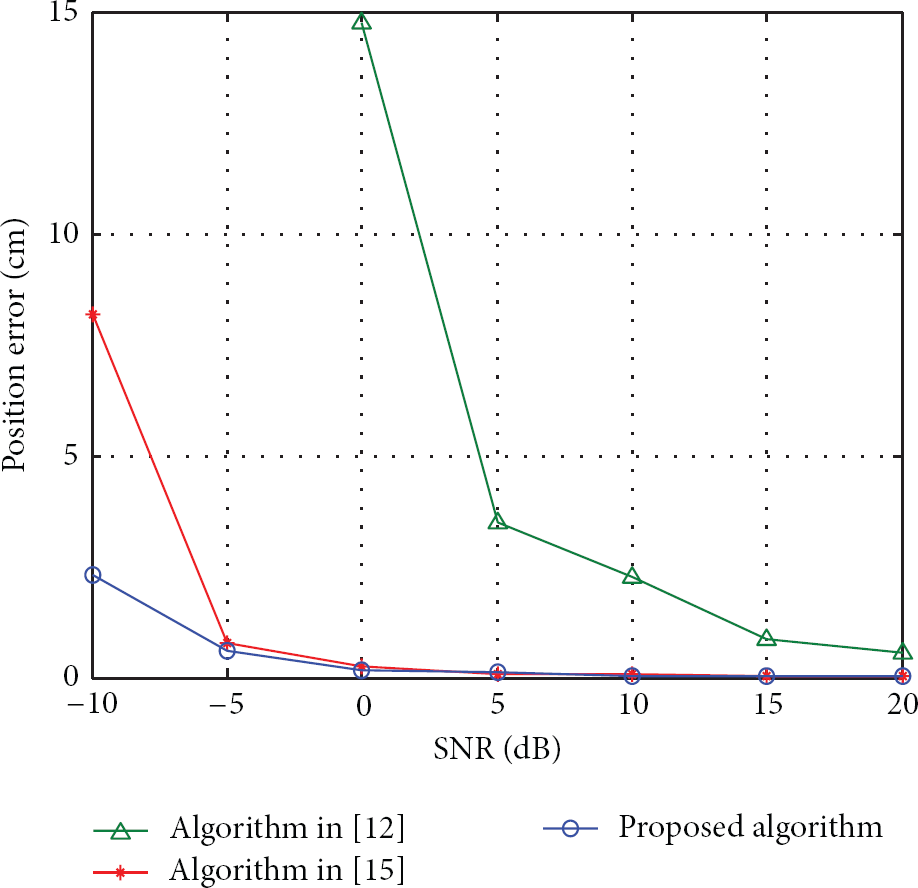
The comparison of localization accuracy (7 anchor nodes).
6. Conclusion
In this paper, we propose a fast 3D node localization algorithm in multipath for UWB wireless sensor networks. It utilizes MPM-based multipath time delay estimation and the marriage of 3D Chan/Taylor location. Compared with the traditional range-based methods, our method has greatly reduced the computational complexity and enhanced the robustness and localization accuracy in multipath and noise environment. The proposed algorithm has key superiorities in fast executing, high accuracy in multipath, and low SNR, which is applicable for node localization in 3D space.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The research is supported by the National Natural Science Foundations of China (61071140 and 61371158) and the Jilin Province Natural Science Foundations (201215014).