
Abstract
This paper presents a methodology of the dynamic analysis and control for a novel hybrid humanoid robot arm. The hybrid humanoid robot arm under consideration consists of a spherical parallel manipulator (SPM) connecting two revolute pairs in series form. The dynamic model of the hybrid humanoid robot arm has been set up based on the Lie group and Lie algebra combined with the principle of virtual work, which can avoid the processing of constraint reaction and the division of logic open chains, as well as a great quantity of differential operation. Aiming at the parameter uncertainties and disturbances, an adaptive backstepping sliding mode controller is developed. Compared with PD control in trajectory tracking simulation, the results show the advantage of the controller.
1. Introduction
One of the final research goals for humanoid robot is to assist or replace human to finish the complex, high precision, highly dangerous, and heavy work, for example, space operation, basic daily work, and so on. Therefore, robot arm is one of the key techniques of the humanoid robot system. The current typical humanoid robots usually have the serial arm, which has a large working volume, low cost, and great flexibility, while its stiffness, accuracy, speed, and load capacity are relatively low [1–3]. However, when the operation tasks have characteristics of rapid, heavy load, and high precision, good performance is quite essential. Besides its load, capacity of the joint will decrease and the position cumulative error will increase when the freedom degree increases. On the contrary, a parallel structure machine has high accuracy and speed; but its working volume is much smaller and its cost is higher [4]. Compared with these two structures, the serial-parallel hybrid structure which combines the advantages of both a serial structure and a parallel structure can be more appropriate for the requirement of humanoid arm operation ability. Therefore there has been an increasing interest for the hybrid humanoid robot arm. A 7-DOF hybrid humanoid robot arm has been presented by professor Liu of Tsinghua University [5]; a 6-DOF humanoid arm has been designed by professor Jin of Yanshan University [6]; besides, Shanghai Jiaotong University professor Gao Feng has proposed a series-parallel structure humanoid with a 7-DOF redundancy arm [7]. However, most of these researches emphasize the synthesis of mechanisms and the analysis of the position; but there is little literature on dynamic analysis and control [8].
Different from series and parallel robots, the serial-parallel hybrid humanoid mechanical arm has a complex drive chain and the dynamic equations are highly nonlinear and coupled which make it more difficult to analyze the kinetics and the dynamics, and the trajectory tracking control is also very hard. Feed-forward control based on computed-moment is a basic control method; however, when there exist disturbances, the system can hardly get a good performance due to its weak robustness. Sliding mode control has a strong robustness and can resist system disturbances effectively. Therefore it is very important for the manipulator control, for it can weaken the system influence caused by random disturbances and variation in load. So far many sliding mode control theories are applied to the robot control [9, 10]. A backstepping control method is proposed to cope with the change of the controlled object and influences caused by disturbances. By integrating backstepping control and sliding mode control, the design of the backstepping control is simplified. Moreover, the robustness of the system is also enhanced. Reference [11] used a fuzzy sliding mode controller to control a 3-DOF robot manipulator. In [12], according to the requirement of the task, a sliding mode controller was designed to complete the trajectory tracking control task. Reference [13] designed an adaptive integral sliding mode controller. Simulation results show its strong ability to resist the disturbance. A backstepping method was adopted to design the nonsingular terminal sliding mode controller [14]. However, all the above researches are only for series or parallel robot; there are few researches on trajectory tracking control for the hybrid humanoid mechanical arm.
In this paper, the dynamic model of the hybrid humanoid robot arm is set up by using the lie group and Lie algebra as well as the principle of virtual work. In order to cope with the high nonlinearity and couplings of the hybrid humanoid mechanical arm, an adaptive backstepping sliding mode controller is designed.
2. Structure Description
2.1. Structural Layout
The considered hybrid robot arm which was proposed to study the reaching motion of arm in high-speed target grasp tasks mainly consists of a shoulder (3-DOF) and an elbow (1-DOF), excluding wrist, temporarily. The general assembly drawing of the hybrid humanoid robot arm is shown in Figure 1. Five revolute pairs with 2-DOF parallel spherical mechanism (5R 2-DOF SPM) that connected a revolute pair in series form have been designed and adopted as a shoulder.
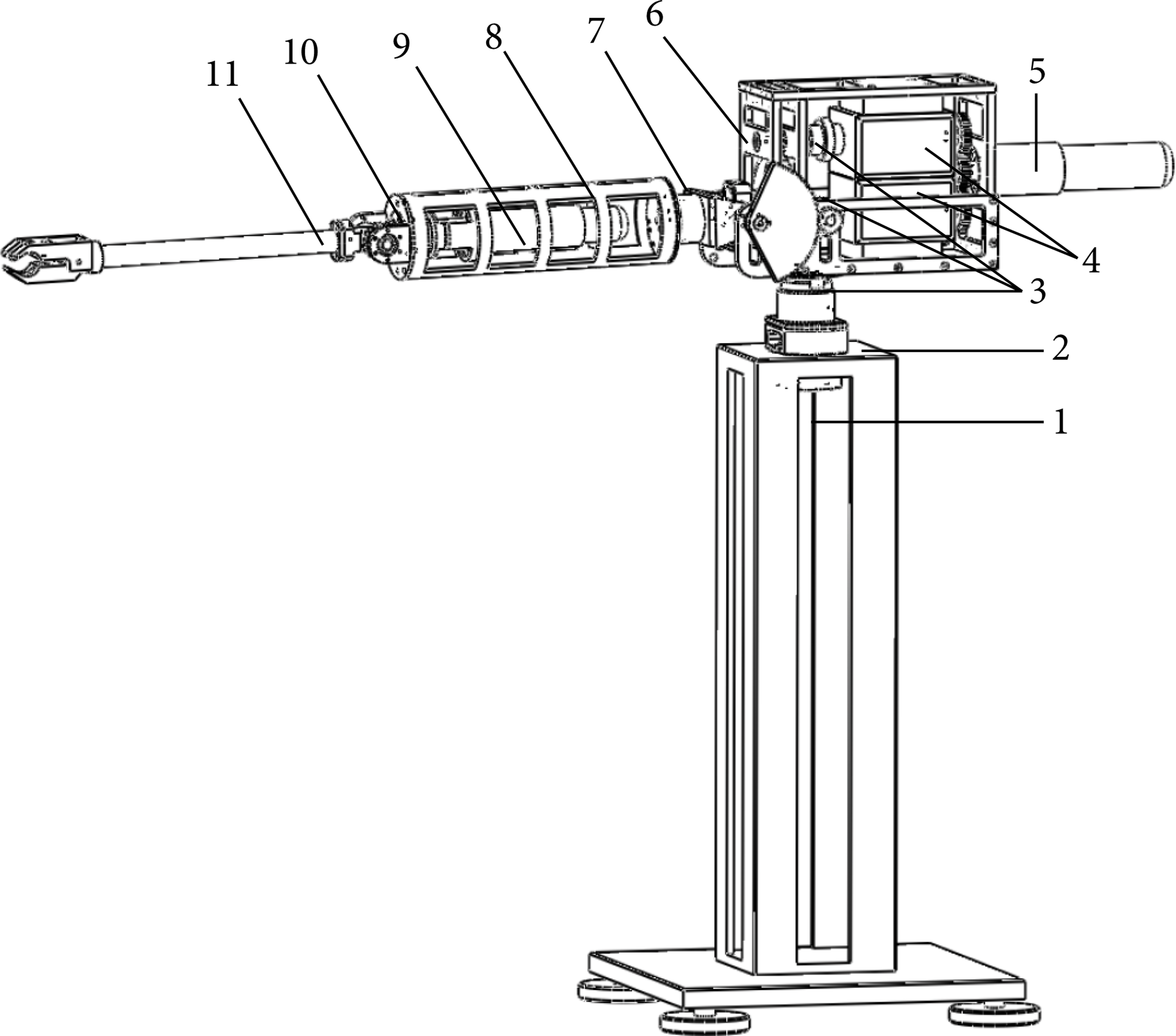
5R 2-DOF SPM (shown in Figure 2) is an orthogonal parallel mechanism which has higher machining accuracy. It includes two driving links, two follower links, and five revolute pairs which constitutes two independent kinematic chains, namely, limb 1 and limb 2. Limb 1 (referred to as D1) is Rs1-L1-Rs3-L3-Rs4-L4 and limb 2 (referred to as D2) is Rs2-L2-Rs5. Each rotation axis of 5R 2-DOF SPM is an intersection in the rotation center of this mechanism and the rotation axis of the two adjacent revolute pairs in each limb is vertical. Shoulder actuator 1 that drives the revolute pair connected to the base can control the shoulder to rotate in the direction of the yaw. Shoulder actuator 2 that drives Rs1 and Rs2 through the clutches and gear mesh can control the shoulder to rotate in roll direction via the limb D1 and pitch direction via the limb D2, separately. The upper arm connects to L4 through Rs5 that is fixedly connected with L2, so that the rotary motion in roll and pitch directions output from the 5R 2-DOF SPM can be transferred to the upper arm. The forearm can be connected with the upper arm through the elbow revolute pair and the elbow actuator can control the forearm to rotate in pitch direction.

2.2. Coordinate System
The system generalized coordinates are

Coordinate systems diagram of mechanical arm.
3. Dynamic Analysis and Modeling
It is difficult to handle closed loops and passive joints in hybrid humanoid mechanical arm dynamics analysis. The main method is to convert the series-parallel mechanism to a series mechanism. By using symbolic calculation and recursive formulation [15], the closed loop of the hybrid transmission chain can be cut. Traditional methods for dynamic modeling are Lagrange method [16] and Newton-Euler method. The former is simple; however, it needs heavy differential operations and the computational complexity of the algorithm is 0(N4). The computational complexity of the latter algorithm is 0(N), but the closed loop makes it very hard to process the derivation, for there exist unknown kinematic parameters caused by the passive joint. Lie algebra and Lie group method have been used in the analysis of multibody system for its clear physical significance and low complexity.
Revolute pair screw of each joint is

where $ i and $ Ri are twist screws that have been shown in Figure 3.
Formulas of velocity screw output from open chain can be expressed as a linear combination of the screws associated with the serial chain joints

where
Formulas of acceleration screw in the open chain can be expressed as
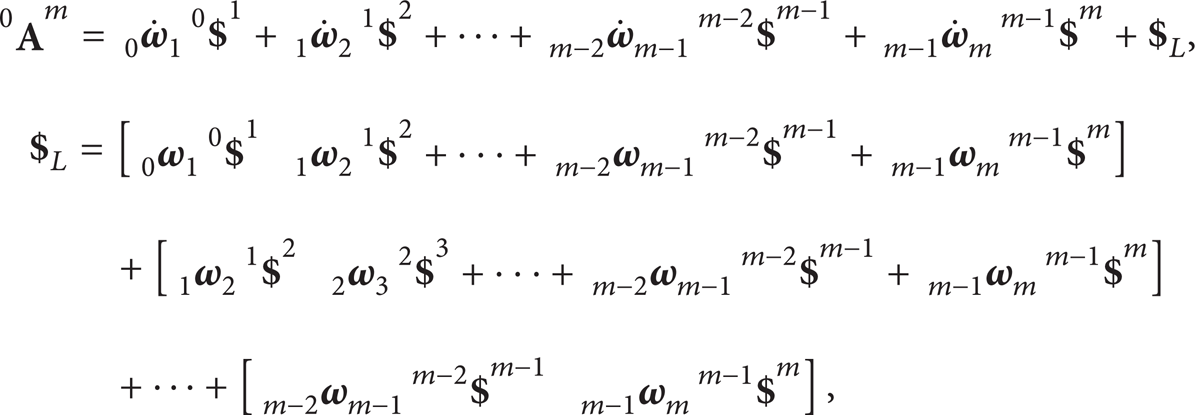
where
Adjoint operator of Lie group Ad can transform the express of velocity screw to a different coordinate system

where
Velocity screw output from 5R 2-DOF SPM

where
The systemic velocity of shoulder, upper arm, forearm, and each link of 5R 2-DOF SPM can be obtained by using (2)–(5), and the express in screw coefficient form is as follows:

where
Wrench screw acting on a rigid body is made up of the inertial wrench, gravity wrench, and external wrench:

where
Algebras dual adjoint operator
Dual adjoint operator of Lie group Ad* can transform the express of wrench screw to a different coordinate system:

where
The power produced by the resulting wrench

where
Thus, constraint equation associated with force and motion of the robot arm is

where
The principle of virtual work states that if a multibody system is in equilibrium under the effect of external actions, the global work produced by the external forces with any virtual velocity must be zero. Thus, set (10) equal to zero; then dynamic equation of the hybrid humanoid mechanical arm can be obtained:

4. Controller Design
When there exist disturbances, the dynamic equation can be written as

where
Defining vectors
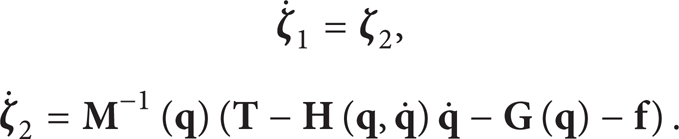
Take
Step 1. Select

Then, the following equation can be obtained by derivation of (14):

Virtual control variables of the hybrid humanoid mechanical arm system are designed as

where

Select the following Lyapunov function:

Then the time derivative of the

In (19), if
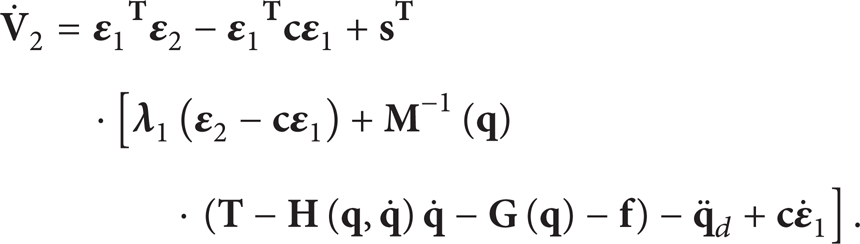
Step 2. The derivation of (17) is

Another Lyapunov function can be chosen as

where

where
In actual control system, it is difficult to forecast the general nondeterminacy
Step 3. Define

where
The third Lyapunov function is defined as

where η is a positive constant. The time derivative of

Select the adaptive control rule as

Design the adaptive backstepping slide mode controller as

where β is a positive constant,
Substituting (28) and (29) into (27), and due to

Selecting the matrix as follows:

then,

Due to

then (30) can be expressed as

By choosing the proper parameters of

Then the globally exponential asymptotic stability of the hybrid humanoid mechanical arm system is guaranteed and the trajectory tracking task can be completed.
5. Simulation Research
To verify the effectiveness of the proposed control scheme, simulations are carried out on the hybrid humanoid mechanical arm system. Table 1 shows its simulation parameters. The simulation was conducted under the environment of MATLAB 7.0 and the controller parameters are, respectively, as follows:
Simulation parameters of the model.

Simulation results are shown in Figures 4–7. Figure 4 shows the trajectory tracking results of the joint space and Figure 5 shows the trajectory tracking results of the task space. Figure 6 shows the tracking error of the joint space and Figure 7 shows the drive torque of each joint. The results show that with the adaptive backstepping sliding mode control the hybrid humanoid mechanical arm system can obtain satisfactory tracking results for both joint space and task space when there are disturbances in the system. The desired trajectory can be quickly approached in joint space and task space. The tracking error and drive torque converge to zero quickly and the system has a very good robustness.

Trajectory tracking results in the joint space.

Trajectory tracking results in the task space.

Tracking error of the joint space.

Drive torque of each joint.
Finally, in order to show the advantages of the proposed controller, simulation results are compared with the PD controller. Simulation results are shown in Figures 8 and 9 when controlled with PD controller.

Trajectory tracking results controlled by PD.

Tracking error controlled by PD.
From Figures 8 and 9 we can see that the hybrid humanoid mechanical arm system cannot track the desired trajectory and the system cannot run stably when controlled with PD controller. Simulation results can also explain the complexity of the hybrid humanoid mechanical arm system and the effectiveness of the adaptive backstepping sliding mode controller.
6. Conclusions
Considering the increasing demand for future on-orbit service in the space, a novel 4-DOF serial-parallel hybrid humanoid arm was proposed by analyzing the human arm structure and its movement mechanism. The humanoid arm adopted a 2-DOF spherical parallel manipulator which is combined with revolute pairs in series forms as kinematic chains and it has the advantage of compact structure, simplicity of position analyses, and high bearing capacity. It is convenient for maintenance and control for there was no prismatic kinematic pair. The closed loop and passive joint processing methods have been elaborated on dynamics modeling. The dynamic analysis with low complexity and dynamic equation of the hybrid humanoid mechanical arm were obtained by using Lie algebra, Lie group method, and virtual work. An adaptive backstepping sliding mode control algorithm for the hybrid humanoid arm trajectory tracking has been developed, which shows the rapid perfect and accessible dynamic equations. Comparative analysis between the proposed algorithm and the PD controller confirms the complexity of the hybrid humanoid mechanical arm system and the effectiveness and validity in the trajectory tracking control of the adaptive backstepping sliding mode controller. Besides, this paper also provides ideas and examples for analysis and modeling of this kind of mechanism.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This work was supported by the National High Technology Research and Development Program of China (863 Program).