
Abstract
A decomposition-dynamic programming aggregation method based on experimental optimization for subsystem was proposed to solve mathematical model of optimal operation for single pumping station with adjustable blade and variable speed. Taking minimal daily electric cost as objective function and water quantity pumped by units as coordinated variable, this model was decomposed into several submodels of daily optimal operation with adjustable blade and variable speed for single pump unit which was solved by experimental optimization. The constructed aggregation model took water quantity pumped by each pump unit as decision variable and discrete values of water quantity pumped by pumping station as state variable and was solved by one-dimensional dynamic programming. Taking operation of typical pumping station as a study case, optimal operation with adjustable blade and variable speed, respectively, had an average cost saving of 4.19%, 22.15%, and 29.86% compared with operation with fixed blade angle and constant speed under 100%, 80%, and 60% load, which also had a remarkable saving amplitude of 15.85% and 24.18%, respectively, corresponding to 80% load and 60% load compared with operation with adjustable blade and constant speed. Meanwhile, the proposed method has provided a new way for solving complex nonlinear mathematical models with 3 decision variables.
1. Introduction
Currently, studies on optimal operation issues for pumping stations are widely developed. The constructed mathematical models for optimal operation of pumping stations usually take the minimal energy consumption as the optimization target [1]. Some models take the minimal electric cost and depreciation cost as the target [2], and, as for the model solution process, there are various solution methods including genetic algorithm [2, 3], dynamic programming method [4, 5], decomposition-coordination method of large-scale system [6], chaos algorithm [7], particle swarm optimization [8], and other nonlinear optimization methods [9, 10]. In order to reduce energy consumption of the pumping operation, the blade adjustment and variable-speed adjustment are the usual operation modes. By adjusting the blade angle [4, 11] or rotational speed [12, 13], the pump unit could adapt to the variation of head and flow in a larger scope, which makes the operation of pumping station in a high efficiency area. Optimal operation of single pumping station is mostly conditioned in a certain time period; the change range of the head meets certain requirements, to decrease the total cost of running power consumption to the minimum, thus adjusting the conditions of how to compose reasonably to head, flow, and power combination; therefore, optimal operation can be achieved.
However, for optimal operation of pumping stations, most literature mostly consider only a single working mode (only the adjustable-blade regulation or only variable-speed regulation), considering combinatorial adjustment with adjustable blade and variable speed in single pumping station less. The author has made some attempts [14] to solve the optimal operation issue of single pumping station with combinatorial adjustment of adjustable blade and variable speed. With the development of frequency conversion technology and its application more extensive in large pumping stations, it is necessary to ensure the operation reliability and reasonable determination of unit match power, to obtain the optimal flow allocation of each pump unit in each divided time period considering the combinatorial adjustment with adjustable blade and variable speed, thus obtaining a better benefit compared with operation with single running condition regulation. In addition, the optimal operation model consists of three decision variables including blade angle, unit speed, and operating number of pump unit, which is difficult to solve by conventional optimization algorithms [15–17], and there are rarely related literatures.
Taking complex system theory into consideration, based on optimal operation of pumping station with single running condition [11, 13], and the feasibility of dynamic programming method in solving complicated nonlinear problem with separable stages [18], and the applicability of experimental optimization theory in solving complicated nonlinear problems containing double decision variables [19], the study on optimal operation for single pumping station with combinatorial adjustment with adjustable blade and variable speed is carried out by means of combining experimental optimization method with decomposition-dynamic programming method.
2. Optimal Operation Model and Solution Method for Single Pumping Station with Combinatorial Adjustment of Adjustable Blade and Variable Speed
To facilitate discussion, we defining the following.
(1) Operation Modes. The pump unit adopting a designed condition (designed blade angle and rotational speed) while operating for a time period is called operation with fixed blade angle constant speed. The pump unit taking a combinatorial adjustment with adjustable blade and variable speed in order to obtain the minimum cost for a time period is called combinatorial optimal operation with adjustable blade and variable speed.
(2) 100%, 80%, and 60% Loads. 100% load represents the water quantity pumped by unit operation with fixed blade angle constant speed for 24 hours. And 80% and 60% loads, respectively, represents 80% and 60% of 100% load under the same head [13].
(3) Starting Time of Pump Unit and the Combination of Period Length and Peak-Valley Electricity Prices. Considering peak-valley electricity prices and the requirement that pumping should not frequently start up and shut down, 17:00 is setting as the starting time and 1 day is divided into 9 segments, all combinations of period length and peak-valley electricity prices are shown in Table 1.
Time period division and peak-valley electricity price of each divided time period.

Note: the electricity prices shown in the table were taken from peak-valley electricity prices published by Price Control Administration of Jiangsu Province in July 2008.
2.1. Mathematical Models
Taking minimal daily electric cost of single pumping station as the objective function, several time periods divided throughout the 24 hours as the stage variables, the blade angle and unit speed of each unit and each divided time period as the decision variables, the optimal operation model [14] for single pumping station with combinatorial adjustment with adjustable blade and variable speed is constructed as follows which takes the total water quantity requirement within 24 hours and the shaft power of each pump unit as constraint conditions.
Objective function is

Total water quantity constraint is

Power constraint is

In the model above, F represents minimal electric cost of single pumping station in 1 day (10000 Yuan). F j represents electric cost of the jth pump unit in one day (10000 Yuan). L1 represents a setting number of units installed in the single pumping station. L2 represents the setting number of time period divided from one day. ρ represents the density of water (kg/m3). g is gravitational acceleration. Q ji (θ ji , n ji ) represents the flow (m3/s) of the jth pump unit in the ith divided time period corresponding to the blade angle θ ji and rotating speed n ji . H ji is head (m) of the jth pump unit in the ith divided time period. Respectively, Δt i and C i are length (h) and peak-valley electricity price (Yuan/kW·h) of the ith divided time period. η z, ji , ηmot, j, ηint, j, and η f, j are, respectively, pump device efficiency, motor efficiency, transmission efficiency, and frequency conversion efficiency of the jth pump unit. η z, ji is related to the flow and head of the ith divided time period. ηmot, j can be considered substantially constant efficiency while load is more than 60%. ηmot, j of large motor can be considered as 94%. The transmission efficiency ηint, j is 100% for directly-connected units. Frequency conversion efficiency of high-power PWM η f, j can be considered as 96%. V e (m3) is a total daily water quantity required by the administration department. P ji (θ ji , n ji ) represents the actual power (kW) of the jth pump unit in the ith divided time period corresponding to the blade angle θ ji and rotating speed n ji , which should be less than the rated power of motor.
2.2. The Decomposition-Dynamic Programming Aggregation Method for Model Solution
2.2.1. Decomposition of Large-Scale System
Taking the water quantity allocations of pump units as coordination variable, model (1)∼(3) could be decomposed into j (j = 1, 2,…, L1) sets of optimal operation sub-model for single pump unit with combinatorial adjustment with adjustable blade and variable speed. This submodel takes minimal daily electric cost of single pump unit as the objective function, the blade angle and unit speed of each divided time period as the decision variable, and the total water quantity V0 requirement within 24 hours and the shaft power P0 as constraint conditions.
Objective function is

Total water quantity constraint is
Power constraint is

In (7)–(9), M is minimal electric cost of single pump unit in 1 day (10000 Yuan). M i is electric cost of ith divided time period for single pump unit (10000 Yuan). Sense of other variables can be analogized according to the variables of model (1)–(3).
2.2.2. Experimental Optimization of Subsystem
The submodel (4)∼(6) is a complex nonlinear model. If the blade angle or unit speed of each divided time period is available, the submodel can be converted into a one-dimensional model which can be solved by dynamic programming. Therefore, it is feasible to make use of experimental optimization method [20] which takes blade angle of each divided time period for orthogonal experiment and the unit speed for dynamic programming. Considering the divided time period as experimental factors and the discrete blade angle of each divided time period meeting the power requirement as experimental levels, the orthogonal array can be constructed. As for each blade combination in the orthogonal array, the submodel (4)∼(6) can be solved by one-dimensional dynamic programming in order to obtain the optimal combination of unit speed and the corresponding minimal daily electric cost of single pump unit.
After all one-dimensional dynamic programming optimizations are finished for each blade combination of the orthogonal array, the orthogonal analysis is carried out, by which to obtain the optimal blade angle combination. Finally, by one-dimensional dynamic programming for combination of unit speed, the optimal combination of blade angle and unit speed in each divided time period under given head can be available.
The submodel solution process mentioned above is only for optimal operation of single pump unit under one given head and one total water quantity requirement. In order to get the optimal results of single pumping station, it is necessary to carry out a series of submodel optimization. Therefore, the total water quantity of single pump unit should be discrete from 0 to maximal water pumping ability under a given head at a certain step. The maximal water pumping ability V0max stands for the water quantity pumped by unit at the biggest blade angle and unit speed meeting the power constraint for the given head. As for each discrete water quantity V0k (k = 1, 2,…, max) of each head, the submodel should be solved by experimental optimization method, by which the minimal daily electric cost of single pump unit M k under each discrete water quantity of each head and the corresponding optimal combination of blade angle and unit speed can be obtained.
Considering there are different types of units or units with performance differences in one pumping station, k times of subsystem solutions should be carried out under different target water-quantity V0k, by which a series of V0k,j-M k,j (V0k,j) (k = 1, 2,…, max; j = 1, 2,…, L1) relationship can be obtained, and the optimal combination of blade angle and unit speed (θ ji , n ji ) (j = 1, 2,…, L1; i = 1,…, L2) corresponding to each target water quantity V0k,j can also be obtained.
2.2.3. Dynamic Programming Aggregation of Large-Scale System
By a series of V0k,j-M k,j (V0k,j) relationship obtained from submodel optimizations (k = 1, 2,…, max; j = 1, 2,…, L1), the aggregation model is constructed as follows.
Objective function is

Total water quantity constraint is

Power constraint is

Referring to literature [11, 13], the aggregation model (7)∼(9) can be solved by one-dimensional dynamic programming method, by which the optimal allocation of water quantity for each unit V0k,j* (j = 1, 2,…, L1) can be obtained. After looking back at the submodel optimization results, optimal combination of blade angle and unit speed (θ ji , n ji ) in each divided time period of each pump unit under a given head and total water quantity could be obtained.
3. Calculation Example of Optimal Daily Operation for a Pumping Station
3.1. Basic Information of Single Pumping Situation
A pumping station is installing 4 vertical axial-flow pumps within which one pump is for standby. The basic operation parameters are as follows: the designed unit speed n is 150 r/min, impeller diameter D is 2900 mm, designed flow of single unit is 33.4 m3/s, and the motor power N0 is 3500 kW. The blade of each pump unit has a hydraulic pressure adjustment with a designed setting angle of θ = 0°, and the adjusting range of blade angle is (− 4°, + 4°). Taking the unit speed of 150 r/min for example, the fitting formulas of performance curves for pump unit corresponding to each discrete blade angle − 4°, − 2°, 0°, + 2°, ans + 4° are shown in Table 2.
Fitting formulas of performance curves under different blade angles at the constant speed of 150 r/min.
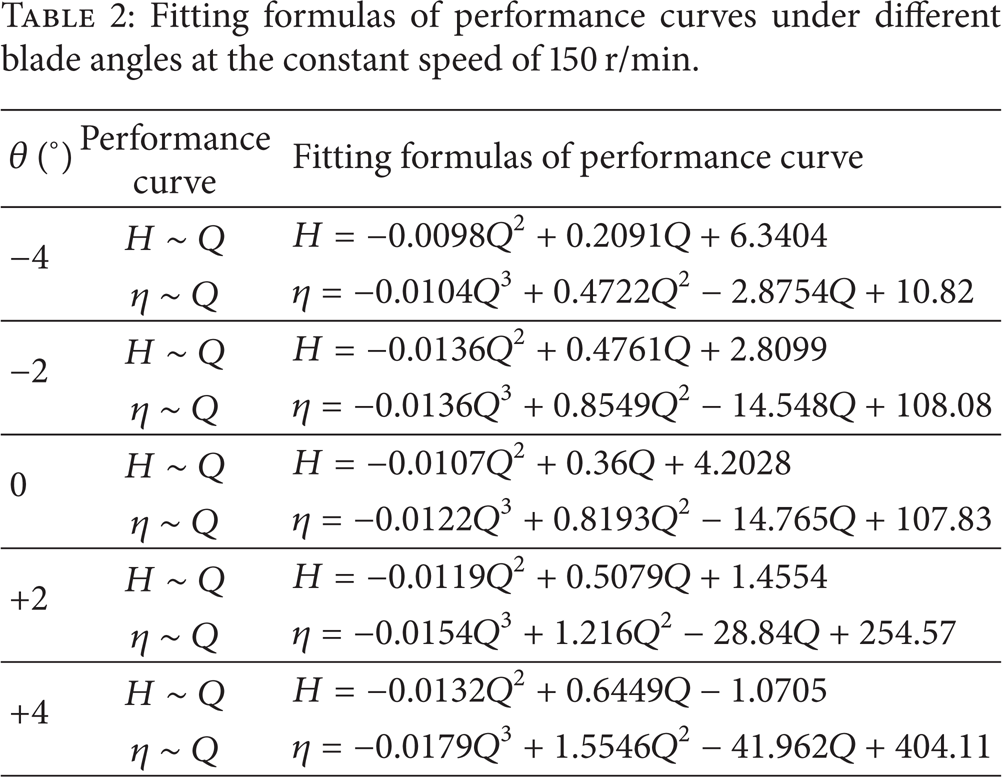
Considering that the pumping station is installed with a variable frequency device which could make the pump units operate at a speed range of [130 r/min, 160 r/min]. On the basis of similarity law and with the assumption of constant efficiency, a series of fitting formulas of performance curves at different unit speeds could be obtained by conversion of fitting formulas shown in Table 2. Taking blade angle of 0°, for example, according to the similarity law,

Considering the water transferring canal upstream and downstream the pumping station has a sufficient volume of water quantity and the change range of daily average head is small, which could be considered that the daily average head of pumping station is constant. Assuming 0.2 m is used to be as the discrete step from the biggest head 4.53 m to the smallest one 3.13 m, respectively, considering 100% load, 80% load, and 60% load as the target water quantity, the decomposition-dynamic programming aggregation method based on experimental optimization for subsystem is applied to solve the mathematical model, by means of which the water pumping cost of water quantity of each 10000 m3 corresponding to the minimal daily electric cost under different heads and loads for the pumping station can be obtained. Also we can obtain the combination of blade angle and unit speed of each unit in each divided time period for each target water quantity.
In order to save calculation work, we assume the pump units installed in the pumping station are with the same type and there is no difference of unit performance among the pump units, which means only one group with n times’ calculations for submodel needs carrying out.
3.2. Optimization Results
According to model (1)∼(3) and the model solution method mentioned above, the optimal operation schemes of multiple pump units under different heads (3.13 m∼4.53 m) and different loads (100%, 80%, and 60%), considering peak-valley electricity prices, could be obtained. Taking 3 kinds of typical working conditions shown in Table 3 (e.g., daily head 3.73 m and 100% load, daily head 3.93 m and 80% load, and daily head 4.13 m and 60%), the corresponding water pumping costs, respectively, are 89.21, 75.57, and 66.95 Yuan/10000 m3. Besides, the water pumping cost of water quantity of each 10000 m3 under optimal operation for each daily average head and each target water quantity (f) is shown in Figure 1. The saving amplitude of the cost (σ) compared with the one under operation with fixed blade angle and constant speed is shown in Figure 2. And the saving amplitude of the cost (σ′) compared with the one under operation with adjustable blade and constant speed is shown in Figure 3.
Optimal operation schemes of multiple pump units with adjustable blade and variable speed for single pumping station under typical daily average head and target water quantity.

θ: blade angle (°); n: rotating speed of pump unit (r/min); off: shutting down.

Pumping cost of water quantity of each 10000 m3 under optimal operation of multiple pump units with adjustable blade and variable speed.
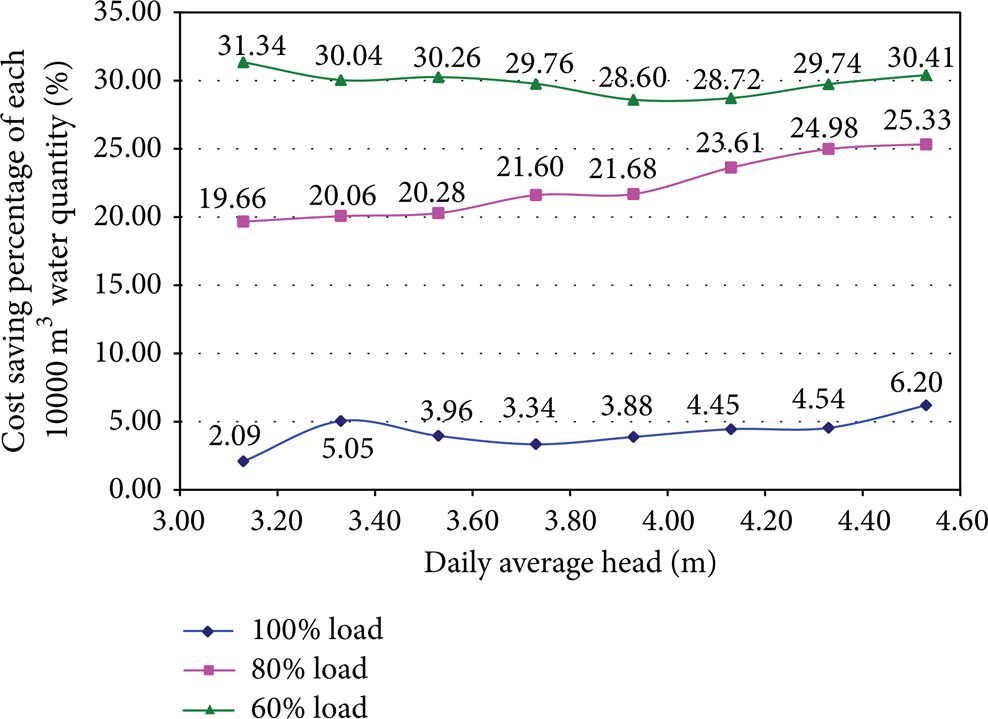
Cost saving of optimal operation of multiple pump units with adjustable blade and variable speed compared with operation with fixed blade and constant speed.

Cost saving of optimal operation of multiple pump units with adjustable blade and variable speed compared with operation with adjustable blade and constant speed.
According to Figures 1 and 2, there is a series of significant optimization benefit. The water pumping cost obtained from optimal operation with adjustable blade and variable speed are 90.54, 73.90, and 62.51 Yuan/10000 m3, respectively, corresponding to 100% load, 80% load, and 60% load, which has a, respectively, saving amplitude of 4.19%, 22.15%, and 29.86% compared with operation with fixed blade angle and constant speed. Also, for each 0.2 m grown of daily average head, there is an average cost growth of 2.96, 2.09, and 2.51 Yuan corresponding to 100% load, 80% load, and 60% load.
From Figure 3, it could be found that optimal operation with adjustable blade and variable speed also has a remarkable saving amplitude of 15.85% and 24.18%, respectively, corresponding to 80% load and 60% load compared with operation with adjustable blade and constant speed. However, cost saving compared with optimal operation with adjustable blade and constant speed under 100% load are negative numbers, which indicates that frequency conversion efficiency η f,j plays an important role under 100% load operation, while η f,j need not be considered when carrying out operation with adjustable blade and constant speed. Thus, operation with adjustable blade and constant speed is a better way when it is under 100% load.
Also, according to cost saving amplitude shown in Figures 2 and 3, it could be concluded that the less operation load is, the better optimization benefit will be obtained while under the same average head.
4. Conclusions
(1) According to the mathematical model of optimal operation for multiple pump units in pumping station with adjustable blade and variable speed, the decomposition-dynamic programming aggregation method based on experimental optimization for subsystem is proposed to solve the model and a series of optimal operation schemes are obtained. This paper has provided a new way for solving the optimal operation issue of single pumping station with different combination of blade angle and unit speed for multiple pump units in the same divided time period.
(2) Considering influence of peak-valley electricity prices and taking a typical pumping station as a study case, a set of optimal operation schemes under different daily average heads and different target water quantities are established, which could provide reference for operation of single pumping station with condition adjustment of adjustable blade and variable speed and also could lay a theoretical foundation for optimal operation issues of multistage pumping stations.
(3) The decomposition-dynamic programming aggregation method based on experimental optimization for subsystem also can be used for solving the complex nonlinear mathematical models with 3 decision variables, hence enriching and developing the theory of large scale system.
(4) Considering the influence of frequency conversion efficiency, optimal operation with adjustabl -blade and variable speed under 100% load is not a feasible way compared with operation with adjustable blade and constant speed.
Conflict of Interests
All the authors declare that there is no conflict of interests regarding the publication of this paper. All the authors do not have a direct financial relation with the commercial identities mentioned in their paper that might lead to a conflict of interests for any of the authors.
Footnotes
Acknowledgments
The work is supported by National Natural Science Foundation of China (Grant no. 60974099) and Natural Science Foundation of Jiangsu Province, China (Grant no. BK20130446).