
Abstract
Transportation is a huge problem that curbs development of societies and economy in many countries nowadays. Participatory sensing technologies encourage people to be involved in environment monitoring through smart devices. Vehicle sensor networks (VSNs) are a novel solution for road event detection with advantages. In this paper, we consider runtime road event detection using VSNs to satisfy the application-specific requirements through collaboration among vehicles. A group road detection scheme (GRD) by using dynamic clustering in VSNs is presented to improve detection performance with low time complexity and message complexity. The simulations with testbed of 5 remote controllable vehicles show that GRD scheme provides effectiveness under different road scenarios.
1. Introduction
Transportation problems become more and more imminent in many countries nowadays. Road detection is necessary and important for road safety and good transportation. Participatory sensing encourages people to take part in environment monitoring by smart devices that they carry. It helps to realize pervasive sensing and computing through public monitoring and information sharing.
A vehicle sensor network is a kind of special mobile wireless sensor networks for vehicle environment [1]. Sensor devices equipped on vehicles constitute a vehicle based mobile sensor network. The VSN senses data opportunistically and collects data through ad hoc communications among vehicles. Consider the mobility and coverage of vehicles among a city without extra overhead; a VSN provides a novel and convenient solution for road event detection. Considering high mobility of vehicles, however, collected sensing data in a VSN is often too sparse to use. To improve the detection performance, group detection is a feasible solution based on collaboration among vehicles.
In this paper, we consider runtime road detection in VSNs to improve application-specific detection performance. We present a group road detection scheme (GRD) by utilizing dynamic collaborative clustering. In GRD, the nodes dynamically join and leave the cluster according to the detection requirements. Each node in a cluster collaborates together to detect a road event. The detection is required to achieve application-specific detection performance without much overhead. There is a tradeoff between detection capability and complexity.
The main contribution of this paper includes the following. (1) The novel group detection scheme in VSNs is proposed to improve detection performance. (2) Dynamical clustering algorithms are proposed to form groups and achieve group detection. (3) The proposed algorithms are distributed with low message and time complexity.
Section 2 presents the related work. Section 3 presents the network model. We present the details of GRD in Section 4. Section 5 is simulations and evaluations. Section 6 concludes this paper.
2. Related Works
Participatory sensing is a revolutionary research direction, which allows people with smart device to participate in environment detection and monitoring voluntarily. In this situation, the sensed data will be processed and shared through wireless networks and the other basic infrastructures. Vehicle sensor networks [2] are the combined outcome of vehicle ad hoc networks and WSNs. VSNs could be used in a wide range of applications [3], for example, in traffic monitoring to save communication costs and avoid network congestions. Vehicle based sensors could also be used to monitor and identify possible vehicle thefts by detecting unauthorized vehicle movements.
In recent research work of sensor networks, road surface monitoring related applications are popular. Mohan et al. [4] propose system solution to monitoring road and traffic conditions in a city, which aims to detect potholes, bumps, braking, and honking by using smart phones with the accelerometer, microphone, GSM radio, and GPS sensors. Karuppuswamy et al. [5] propose a vision based scheme for pothole avoidance in a mobile robot by the use of cameras. They detect potholes by looking for large circular objects in the field of view. Eriksson et al. [6] propose road surface pothole detection by using machine learning mechanism based on hidden Markov model. Keally et al. [7] propose a confident event detection algorithm based on hidden Markov model in terms of application-specific detection demand.
For vehicular networks, clustering is a necessary method to cluster and manage vehicles [8]. Rawashdeh and Mahmud [9] propose a speed-overlapped clustering technique on highways by using vehicular speed and relative movement direction. Gurung et al. [10] propose a moving-zone based architecture with moving object modeling and indexing techniques to facilitate message routing in VANETs according to the unique characteristics of network environments. Ucar et al. [11] propose a clustering mechanism to choose the node with the least mobility calculated by speed difference among neighbor nodes as the cluster head to maintain the stable clustering in VANETs. Most of the above work is for vehicular ad hoc networks and the clustering scheme aims to communications among vehicles. None of them is for effective road event detection. Communications focus on the effective connections and information exchange, while detection focuses on the retrieve of useful data among vehicles.
In this context, the paper focuses on dynamically-clustered collaboration based group road detection scheme in vehicle sensor networks with low overhead.
3. System Models
Vehicle sensor networks are widely used in the area of intelligent transportation systems related applications, and here the paper focuses on road event detection applications. Vehicles collect road event data by opportunistic communications as shown in Figure 1.

A vehicle sensor network for road event detection applications.
We use a dynamic graph
In road detection process, each vehicle can be in one of the states: initialized, clustering, and clustered as in Figure 2.
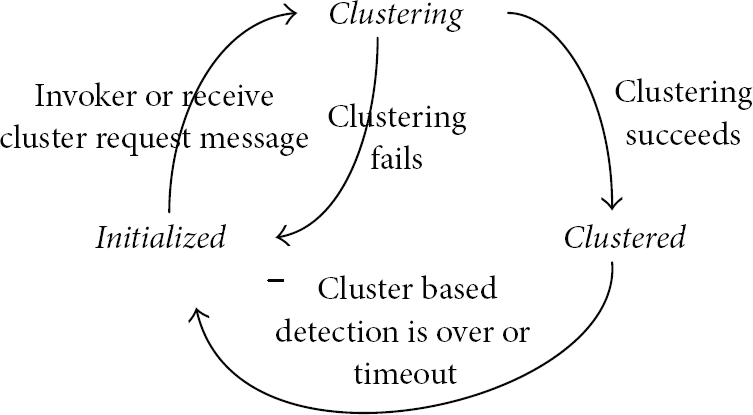
State transition machine for a vehicle.
“Initialized” is the initial state for vehicle when it is not in any of the groups. An invoker broadcasts out a cluster-request message to begin the dynamic clustering process.
“Clustering” is the state when a node is in the decision of whether to be in the current cluster or not. Either an invoker or the other vehicles can be in this state. If an invoker receives responses from the other nodes that are willing to cooperate, the clustering process is successful and then the invoker enters into “clustered.” Otherwise, the vehicle will enter back to “initialized.” If it is a noninvoker vehicle that is in “clustering,” it will calculate to make decision on whether to join or to reject the clustering request. A noninvoker node which decides to join the current cluster will enter into “clustered.” Otherwise, it enters into “initialized.”
Obviously, “clustered” is the state that a node is in the cluster and cooperates with the other cluster members. When the cluster based group detection is over or larger than a predetermined timeout, the node in “clustered” enters back to “initialized” state and leaves the cooperation. The timeout is used to be released from long time utilization or lost connection from the clustering. If a vehicle joins the group detection, it will keep staying in the group and work as a group member for a while. The maximal working time is timeout.
4. GRD Design
GRD design aims to construct dynamic groups (clusters) to guarantee efficient road detection. The dynamic cluster is constructed through the following function modules: local invoker, cluster generation, and runtime decision modules.
“Local invoker” is the module to determine the local invoker for GRD. The local invoker is the vehicle with sparse data that needs to utilize GRD to improve the detection. The invoker sends out a group detection request (i.e., cluster-request message) to request for clustering.
“Cluster generation” is the module to choose event-related vehicles to join into groups and try to satisfy the detection requirement.
“Runtime decision” module makes decisions for the vehicle on whether to join/form the group or not.
Figure 3 illustrates the above modules on both invoker and noninvoker vehicles, respectively. The noninvoker vehicles join the cluster or reject the request through the modules. It can also terminate current cluster based group detection according to application requirements or local detection efficiency.
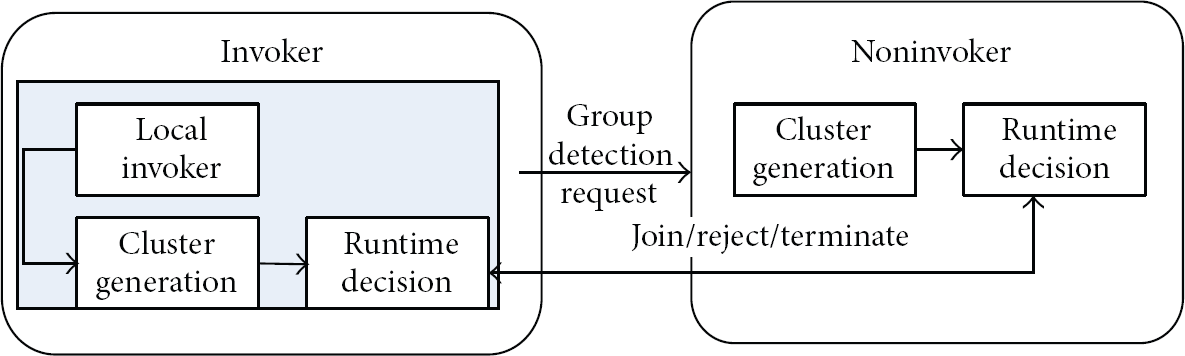
Dynamic cluster related function modules.
4.1. The Local Invoker
For the convenience of illustration, some of the notations used in the paper are explained in Notation Section.
Let the road detection zone Z, which can be modeled by an approximate rectangle area and divided into subzone as grids


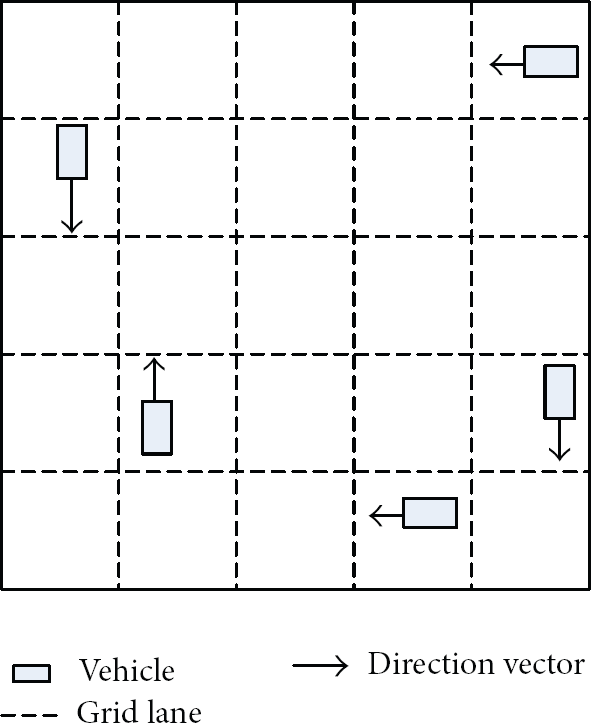
Considering the vehicle mobility, the mobile detection capability (to abbreviate it as detection capability in the remaining) for vehicles should include the summation of all the static detection capability over time and space.


An example of detection scenario when vehicles move across the grids.
If a vehicle finds the local detection capability not suitable for the application-specific detection performance, it will invoke the group detection process and becomes an invoker.
According to the state transition machine, the local invoker broadcasts out a cluster request with the request of clustering process and enters into “clustering.” The cluster-request message broadcast is based on CSMA/CA mechanism to avoid contentions. The node in “initialized” state that receives a cluster request message enters into “clustering” state, which is the state to make decision on cooperation.
Algorithm 1 describes Pseudocode of the invoker selection. The message is broadcasted among the neighborhood. Each node executes the algorithm in sequence in a distributive way. It is obvious that Algorithm 1 is with
Ignore received messages broadcast a Cluster-Req message state← “clustering” state← “clustering”
4.2. Cluster Generation
After the invoker broadcasts out a cluster request, the neighbors in “initialized” state which receives the message will decide whether to join the requested group detection or not by runtime decision module. If nodes in other states receive the message, they just ignore it. The cluster request message will be forwarded in the network until the group achieves satisfied detection capability.
Define the group detection capability of vehicle group set S invoked by

// Runtime_Decision() is the Runtime Decision algorithm state← “clustered” become a cluster member // reject the clustering or terminate from the cluster state← “initialized” forward the Cluster_Req msg
// wait(T_MAX1) is the delay function for clustering // T_MAX1 is the maximal waiting time for clustering state← “clustered” become a cluster // Broadcast a Cluster_Req msg state← “initialized” // no “join” received during waiting time implies failure
Update the cluster
4.3. Dynamically Clustered Cooperation and Decision
In runtime decision process, for an invoker, vehicles that can contribute to current event detection are invited to join in to improve detection capabilities. For a noninvoker, it will make decision according to the detection relevance with the inviter. So it needs a negotiation process between runtime dynamic-clustered cooperation between the invoker and the noninvoker. Through the negations among vehicles, nonrelevant vehicles are filtered from the cluster and relevant vehicles are involved in the cluster to make group detection with the application-specific detection capability.
The detection relevance metric is defined to determine what kind of degree the vehicle can contribute to the current event detection. Assume invoker


Response to invoker with msg(join) Response to invoker with msg(reject) // cluster members can leave the group for application needs Response to invoker with msg(terminate)
5. Simulations
The overall goal of this part is to make simulations in the remote-control vehicle based transportation situations and then make evaluations to testify the effectiveness and accuracy of GRD. Actually, the detection performance is related to the detection methods. The simulations are implemented based on the same basic detection method with the situation of only local vehicle detection involved and with GRD, respectively. The comparisons are made that try to show the difference between the two schemes based on the same basic detection method. To simplify the tests and show the obvious differences from the results, a threshold based event detection method is taken in the simulations. In the simulations, local vehicle detection scheme is to make basic threshold based event detection without the group collaboration among vehicles; that is, the sensing data of each vehicle is compared with the application-specific threshold and then to decide the event based on it. The GRD scheme proposed in the paper is to make threshold based event detection with the group collaboration scheme; that is, the average sensing data of the group achieved is compared with the application-specific threshold and then to decide the event.
A simulated testbed consists of 5 remote controllable vehicles. The vehicle can work over 30 minutes continuously. The vehicle for testbed is shown in Figure 5.

A remote controllable vehicle.
An illustration of testbed is shown in Figure 6. The vehicle is based on Arduino control board with 4 wheel drive. It is equipped with accelerometers during the simulations. The vehicle could move flexibly as in real transportation. The sensors on the vehicles are connected to one another wirelessly through the low-power radio. Two vehicles in the testbed are also equipped with a WiFi card. The test area is covered by WiFi. Then the sensing data collected by each vehicle is forwarded and then gathered to central gateway through WiFi connection. The driving area is divided into virtual grids and vehicles drive according to the grid lane. Each vehicle can drive toward the vertical and horizontal directions as shown in the figure. The vehicle can be controlled to change the direction when it approaches the area border or to avoid collisions.
An Illustration of driving scenario in testbed.
Each vehicle is placed randomly on different locations and lanes and then controlled to drive in different directions around the test area. There are several artificial upward/downward slopes built by boards and slippery road area made by spilling jelly as well as uneven areas with broken stones in the test place to simulate complex road driving. The artificial experiment scenarios are used to simulate uneven, wet, and slippery road conditions. The location of simulated road events is randomly chosen. Vehicles are controlled to move around in the test place. The sensors are mounted on each vehicle with the same orientation and place. The ultrasonic wave sensor is used for measuring the distance and location. In the simulations, the vehicles are controlled to travel within 5 different road condition scenarios as shown in Table 1.
Simulated road scenarios.

Figure 7 shows the detection accuracy rate within different scenarios. The results show we achieve 25.3%–40.2% more accuracy ratio when using group detection. In GRD, more relevant vehicles are involved into detection and improve the accuracy by more useful observation data. GRD helps to improve the accuracy of detection.
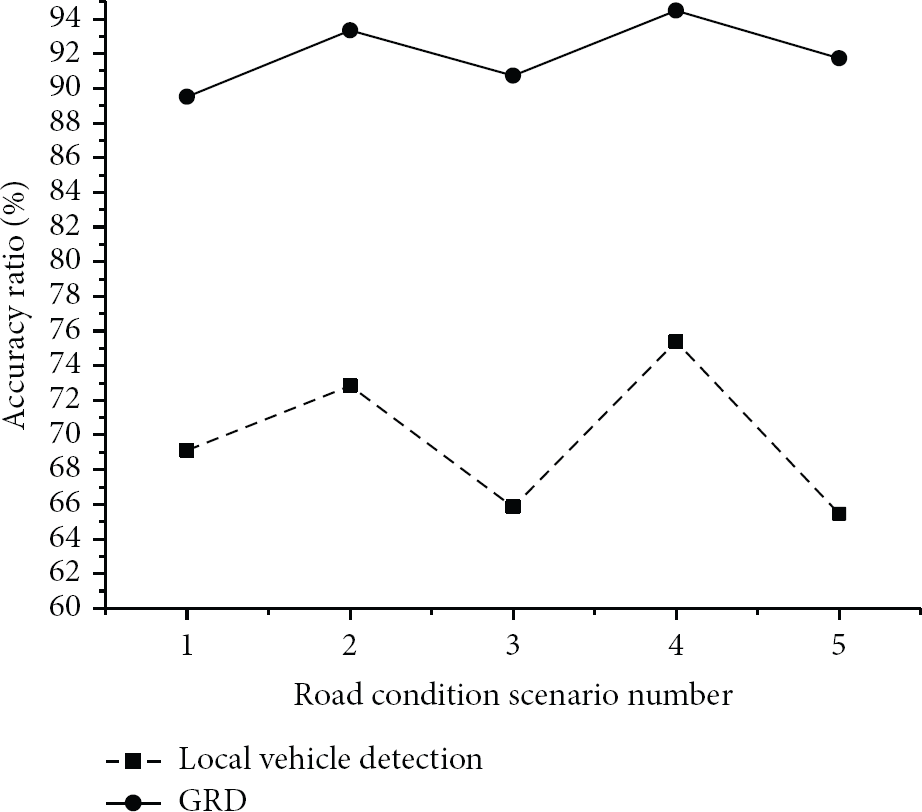
Detection accuracy ratio within different scenarios.
Figure 8 shows false positive rate within different scenarios. GRD helps to improve the false positive rate.

False positive ratio within different scenarios.
Figure 9 shows the false negative rate within different scenarios. GRD decreases around 52% false negative. Obviously, group detection has better performance than only using local vehicle detection.
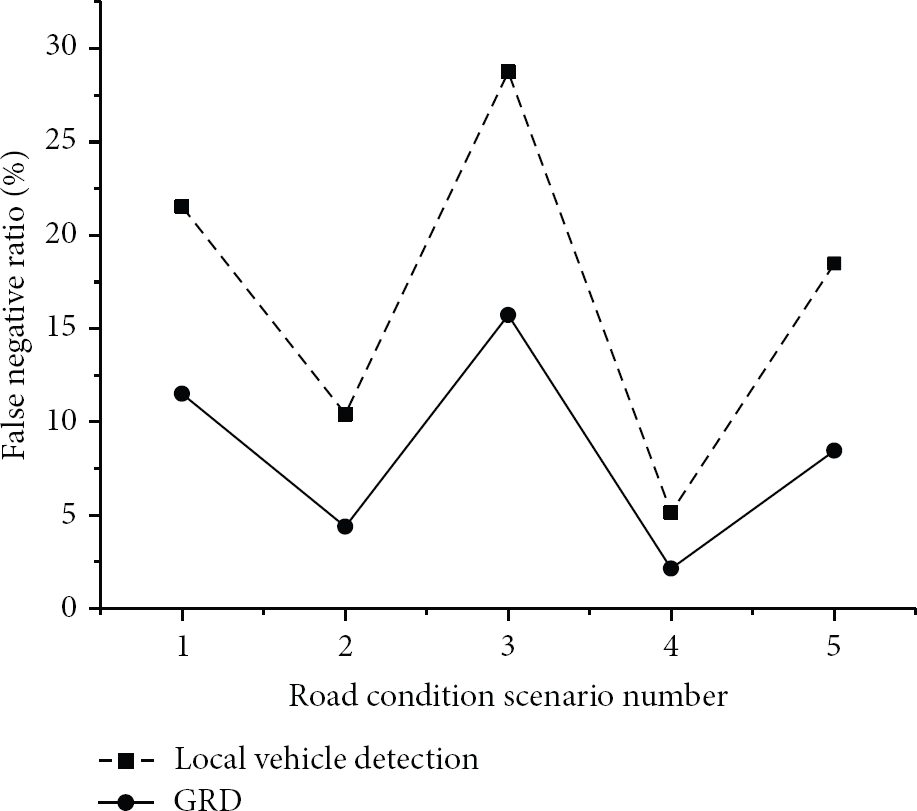
False negative rate within different scenarios.
Figure 10 shows the average residual energy ratio of network nodes within different scenarios. The residual energy ratio is calculated by residual energy versus initial energy. We compare GRD with local vehicle detection. GRD results in no more than 17% average residual energy ratio when compared with local vehicle detection cases in the network. So, GRD will not incur too much energy consumption. Especially, for real vehicles, the sustainable energy supply is not a big problem.

Average residual energy ratio within different scenarios.
6. Conclusion
Vehicle sensor networks will be widely utilized in intelligent transportation systems in a very near future, which can be used to inform the drivers about kinds of road condition events. In this paper, we propose a group detection scheme based on dynamically clustered cooperation scheme called GRD in VSNs. GRD scheme includes algorithms of cluster invoked process, cluster generation, and runtime decision through vehicle collaborations. The simulations are carried out on 5 controllable vehicles with different scenarios. The results show that GRD can help to improve detection performance effectively without much overhead.
The further work will also be carried out on the testbed consisting of voluntary cars equipped with sensors on campus road areas. The test results will also be compared with other related work to testify the effectiveness.
Footnotes
Notation
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
Thanks are due to the anonymous reviewers and the academic editor. This work was supported by Chinese National Science Foundation Project (no. 61103218), The Natural Science Foundation of Jiangsu Province Youth Project (no. BK2012200), Hubei Province National Science Foundation Project (no. 2011CDB446), and Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry.