
Abstract
The optimal and distributed provisioning of high coverage capacity in mobile sensor networks is known as a fundamental but hard problem. The situation is exacerbated in a mobile wireless setting due to the dynamic coverage of a mobile sensor network resulting from continuous movement of sensors. In this paper, we propose an optimization framework for maximizing the coverage capacity in mobile sensor networks that comprise both stationary sensors (SSs) and mobile sensors (MSs). Both the intracoverage capacity and the intercoverage capacity are jointly optimized by considering the control of the power and distance between MSs and SSs and the interference among MSs. We propose a new noncooperative control algorithm that iteratively solves intracoverage capacity optimization between MSs and SSs. We also further formulate intercoverage capacity as evolutionary coalition game and present a new cooperative interference control algorithm that iteratively solves intercoverage capacity optimization among MSs. We prove the existence of a solution for iteration control equation of the power and distance and the interference to maximize the coverage capacity. Finally, we assess the performance of the proposed algorithm and show that proposed control scheme can effectively improve the average coveragecapacity in mobile sensor networks.
1. Introduction
Mobile sensor networks have emerged as a practical solution for ubiquitous coverage in broadband wireless sensor networks. It can be mapped to sensor service platforms such as mobile robots [1, 2]. In this respect, next-generation mobile sensor networks will entail an important paradigm shift toward a multitier small hybrid infrastructure in which low-cost, low-power base stations such as mobile sensors are deployed for providing short-range transmission. The coverage nodes of a mobile sensor network resulting from continuous movement of sensors nodes at different locations communicate with each other over wireless links. An important consideration in the design of a mobile sensor network is the network's ability to efficiently support high-capacity multicast applications over mobile wireless links (e.g., video streaming). Mobile sensor networks can also play a vital role in homeland security; for instance, sensor nodes can be mounted on vehicles and will move to dynamically patrol and monitor the environment. This paper addresses coverage capacity optimization issues for such applications. A typical mobile sensor network with mixed mobile devices is shown in Figure 1.

Typical scene of mobile sensor networks.
In a stationary sensor network, its coverage area is determined by the initial configuration and does not change over time. In a mobile sensor network, previously uncovered areas become covered as sensors move through them and covered areas become uncovered as sensors move away. As a result, the areas covered by sensors change over time. The coverage of a mobile sensor network depends not only on the initial network configurations but also on the mobility behavior of the sensors. The wireless coverage established among radios has relatively low capacities because each wireless link capacity depends not only on its own transmission power and distance between MSs and SSs but also on the channel gain and mitigating interference among mobile sensors.
The design of mobile sensor networks for high-capacity involves at least two sets of technical challenges. The first set of challenges involves dynamic coverage ability in mobile sensor networks. The second set of challenges arises due to the presence of interferences and how effectively a sensor network can mitigate interferences. This paper addresses both sets of challenges together by considering joint optimization of coverage capacity about the control of the power and distance between MSs and SSs and the interference among MSs. We focus on achieving maximum coverage capacity and proposing a framework to model and solve this optimization problem of coverage capacity in an efficient and distributed manner.
The main contributions of this paper can be summarized as follows.
We formulate the problem of the coverage capacity optimization as an evolutionary game control for the power and distance between MSs and SSs and the interference among MSs. The optimization controls for them are integrated in a framework that represents multiarea strategies, which strikes a balance between the maximization of coverage capacity and the minimization of interference at the physical layer. For the control of the power and distance between MSs and SSs, we propose a new noncooperative control algorithm that iteratively solves intracoverage capacity optimization between MSs and SSs. By deducing Jacobian matrix, we prove the existence of a solution for iteration equation of the power and distance to maximize the intracoverage capacity. For the control of the interference among MSs, we present a new cooperative interference control algorithm using evolutionary coalition game theory that iteratively solves intercoverage capacity optimization among MSs and eliminates interference by dynamics evolution. The replicator dynamics of interference cancellation evolving in MS coalitions is given. We prove the evolutionary coalition game globally converges to the optimal solution that maximizes the intercoverage capacity under Nash equilibrium conditions.
The remainder of this paper is organized as follows. We first discuss related work in Section 2; then we propose the joint optimization framework and control algorithm, together with evolutionary game theory, to solve the coverage capacity optimization problem in Sections 3, 4, and 5. Section 6 presents the simulation. Finally, Section 7 concludes this paper.
2. Related Works
Mobile sensor coverage related topics have become an active research area. In this section, we present a brief overview of the previous work on the coverage of both the stationary and mobile sensor networks. Mobile sensors are widely studied in sensor networks for coverage improvement [3–5], load balancing, or lifetime extension [6]. The relationship between coverage area and network connectivity is investigated in [7, 8]. Most of these approaches do not consider the optimization on the intracoverage capacity and intercoverage capacity that a mobile sensor can sense. In this paper, we study the possibility of using evolutionary game to optimize coverage capacity as complex mobile sensors. In [9], the authors considered the coverage of the area and the connectivity in an unreliable wireless sensor grid-network and derived the conditions for the sensing range to ensure that an area is fully covered. In [10], the authors proposed a novel energy-efficient coverage-time optimized dynamic clustering scheme that regulates cluster radii for balanced energy consumption among CHs to maximize coverage-time. In [11], the authors proposed a minimum-cost maximum-flow based schedule algorithm to determine a movement plan for the sensors in order to maximize the sensor network coverage and minimize the number of flips. In [12], the authors defined and derived several important coverage measures that include area coverage, detection coverage, and node coverage. The coverage problem is further formulated as an optimization problem which minimizes the variance of sensors in different areas in [13]. In [14], the authors formalized the tradeoff that exists between an all-static network and a network with mobile sensors, proved necessary conditions for coverage, and proposed a distributed relocation algorithm. In [15], the authors studied the dynamic aspects of the coverage of a mobile sensor network resulting from the continuous movement of sensors and the coverage measures related to the area coverage and intrusion detection capability of a mobile sensor network. In [16], the authors took energy-efficient factors into consideration and described the coverage and connectivity issues from three aspects: coverage deployment strategy, sleep scheduling mechanism, and adjustable coverage radius in wireless sensor networks. However, [14–16] do not provide bounds of the intracoverage capacity and the intercoverage capacity for fraction of area covered or maximum network utility.
In this paper, we show that the network can be completely covered by using evolutionary game. We give bounds on the maximum coverage capacity of mobile sensors. We also provide a distributed algorithm that can achieve the optimal solution, while the algorithm in [17] is a distributed coalition formation algorithm for interference alignment algorithm, with no guarantees of optimality for intercoverage capacity. The bound on maximum intracoverage capacity in this paper is based on the noncooperative game [18, 19]. The bound on maximum intercoverage capacity in this paper is based on the cooperative game [20, 21]. In this paper, we propose a new iterative algorithm using the game theory, and it converges relatively fast to optimize intracoverage capacity. We also propose evolutionary coalition game to optimize the intercoverage capacity in mobile sensor networks, where the intercoalition interference can be mitigated via a spatial interference alignment (IA) scheme because MSs cooperate to adjust the spatial structure of their transmitted signals so as to avoid interference among themselves [17, 22, 23].
3. Coverage Capacity with Mobile Sensor Networks
3.1. System Model and Joint Optimization Framework
We assume that there are

The coverage area in mobile sensor networks.
Definition 1.
Coverage capacity: it is both the intracoverage capacity between MSs and SSs and the intercoverage capacity among MSs that are jointly optimized by considering the control of the power and distance, as well as the interference.
Definition 2.
Noncooperation area: let X be noncooperation coverage capacity area for intracoverage capacity between MSs and SSs. Let
Definition 3.
Cooperative area: let Y be cooperative coverage capacity area for intercoverage capacity among MSs. Let
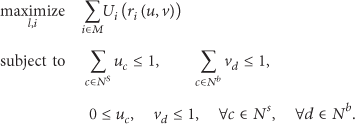
This paper adopts a network utility maximization approach. We consider a concave utility function [25]. We further assume that the utility is separable. For the rest of this paper, we adopt the following utility:


4. Intracoverage Capacity Optimization in Noncooperation Area
4.1. Noncooperative Evolutionary Game for Intracoverage Capacity
Intracoverage capacity is related to transmission probability and listening probability. We formulate the multichannel intracoverage capacity maximization problem as

Definition 4.
The noncooperative coverage game formulation for intracoverage capacity optimization can be described as follows:
H: the players in this game are the mobile sensor and the stationary sensor.
A: the strategy of each mobile sensor is to adjust shared listening power and the distance for each stationary sensor.
P: the payoff of each mobile sensor is determined from the intracoverage utility

4.2. Intracoverage Capacity Dynamics
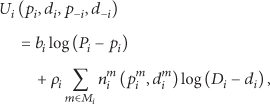
At the evolutionary equilibrium, the number of stationary sensors attaining listening power opportunities from mobile sensor i is a function that relates to listening power size and distance vectors. Given the logarithmic utility function in ((1)), intracoverage utility of a mobile sensor can be rewritten as follows:


Theorem 5.
For
Proof.
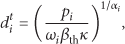
Let


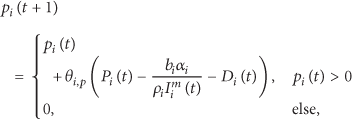
By substituting ((11)) into ((8)), we can express the power as


4.3. Evolutionary Stability for Intracoverage Capacity Optimization
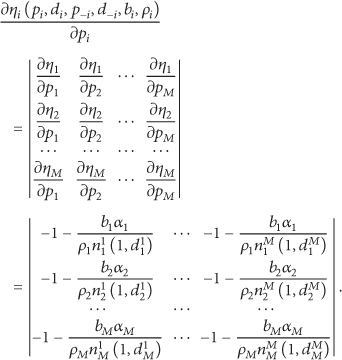
Having obtained the iterative algorithm, we then prove its convergence.
Theorem 6.
The Jacobian matrix will be nonzero if parameters
Proof.
If
If we want

If we want


Denote M as the number of coalitions For ( {Each coalition all MSs together construct a player set Initialize For ( {Update according to ((6)) Update Update Update Update If Break } }
In the preceding sections, the stationary sensors covered by different MSs are typically scheduled noncooperatively. Consequently, neighboring MSs can schedule their transmissions in the coverage over the same subcarrier, hence causing interference to one another and limiting the coverage performance for their stationary sensors. To solve this problem and mitigate MS-to-MS interferences, the MSs have an incentive to cooperate and coordinate their transmissions using advanced transmission techniques such as interference alignment. In this respect, the MSs evaluate the signal to interference plus noise ratio (SINR) over the subcarriers assigned to their stationary sensors. Successively, based on the estimated SINR, the MSs can decide whether to take action for cooperation, that is, forming a coalition to mitigate the intercoverage interference via a spatial interference alignment scheme.
5. Intercoverage Capacity Optimization in Cooperation Area
In this section, we formulate the problem of intercoverage capacity optimization among MSs as a coalitional game in partition form and we discuss its key properties. Finally, we propose a distributed algorithm that enables MSs to cooperate and reach a partition that lies in the evolutionary game. In a coalition formation game, the cost and coalitional structure for cooperation play important roles.
Definition 7.
A coalition formation game can be defined as transmitter cooperation
Definition 8.
A payoff vector
Definition 9.
An imputation

Definition 10.
A collection of coalitions in the grand coalition
The partition form enables accounting for the relationships of mutual interference between distinct coalitions in cooperation areas. By cooperative suppressing of the interference, each MS can increase its own individual rate and also the coalition partners. The sum rate of individual payoff of a MS i in coalition S over its active links is




To solve the proposed MS coalition formation game in partition form, we will use the concept of an evolutionary game as introduced in [26], which is a suitable outcome of a coalition formation process that takes into account externalities across coalitions, which, in the considered game, are represented by effects of mutual interference between coalitions of MSs. We provide an interference alignment evolutionary game for MSs to form partition by selecting different strategies. We then, using the replicator dynamics, explore evolutionary stable strategies of the game to demonstrate the stability of partition form.
Definition 11.
An interference alignment evolutionary game (IAEG) is defined as 4-tuple
In the IAEG, each MS may select the strategy IA or defect (de). Selecting the strategy IA by a MS means that it will cooperate with its counterpart; selecting the strategy




Theorem 12.
When
Proof.
Calculating the derivative of ((29)), we get


Initial state at the MS: the network is partitioned by noncooperative coverage capacity optimization without interference alignment. (1) Intercoverage interference discovery (a) Through RSSI measurements, each MS detects nearby stationary sensors activating on the same subchannel. (b) For each of the occupied subchannels, each MS sorts the interference degree from the stronger to the weaker. (2) IA coalition Formation for all the used subchannels do {each MS i computes the cost of cooperation with the MS j according to ((23)) if Update the optimal strategy MS selecting the strategy IA to form partitions according } if {Evolve to stable state Break } }
According to Theorem 12, intercoverage capacity management must satisfy conditions of Theorem 12 that will promote sensor nodes to select the strategy
6. Simulation
The proposed model is simulated using MATLAB and NS2, and experiments have been performed in a 2.20 GHZ i3-2330 machine having 2 GB of memory. We conduct extensive simulations over sensor networks to evaluate their performances. In addition, we also implement flood protocol. We use a 50-node sensor network, in which sensors are evenly deployed in a


Four evolutionary states in mobile sensor netwoks.
Case 1.
Coalition scale changes from 2 to 1 after 1-time partition in the speed υ in mobile sensor networks.
Case 2.
Coalition scale evolutes from 1 to 2 after 1 time of merger. In addition to the above, there are also two cases:

Case 3.
Case 4.
The m coalition evolutes
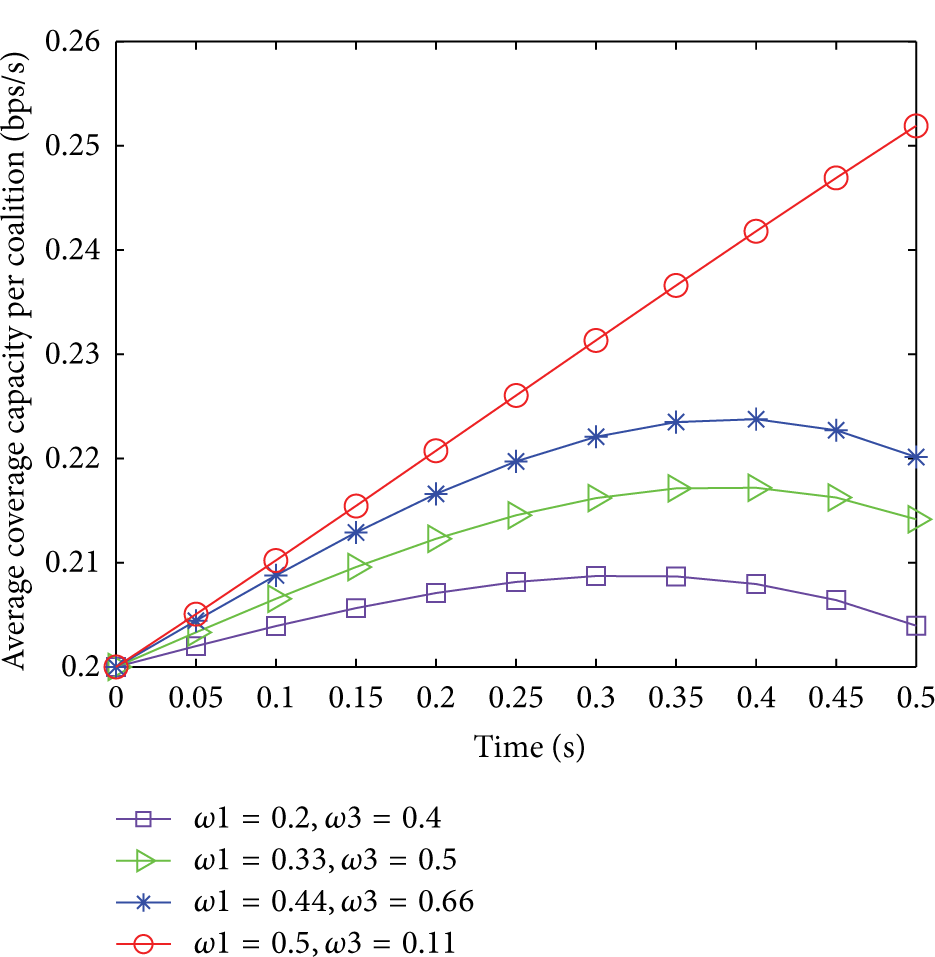
We first consider the network which comprises both stationary and mobile sensors. In the simulation, mobile nodes are uniformly scattered into the network with area of L. In Cases 1 and 2, the initial value of coverage capacity is 0.2. Figure 4 shows effect of
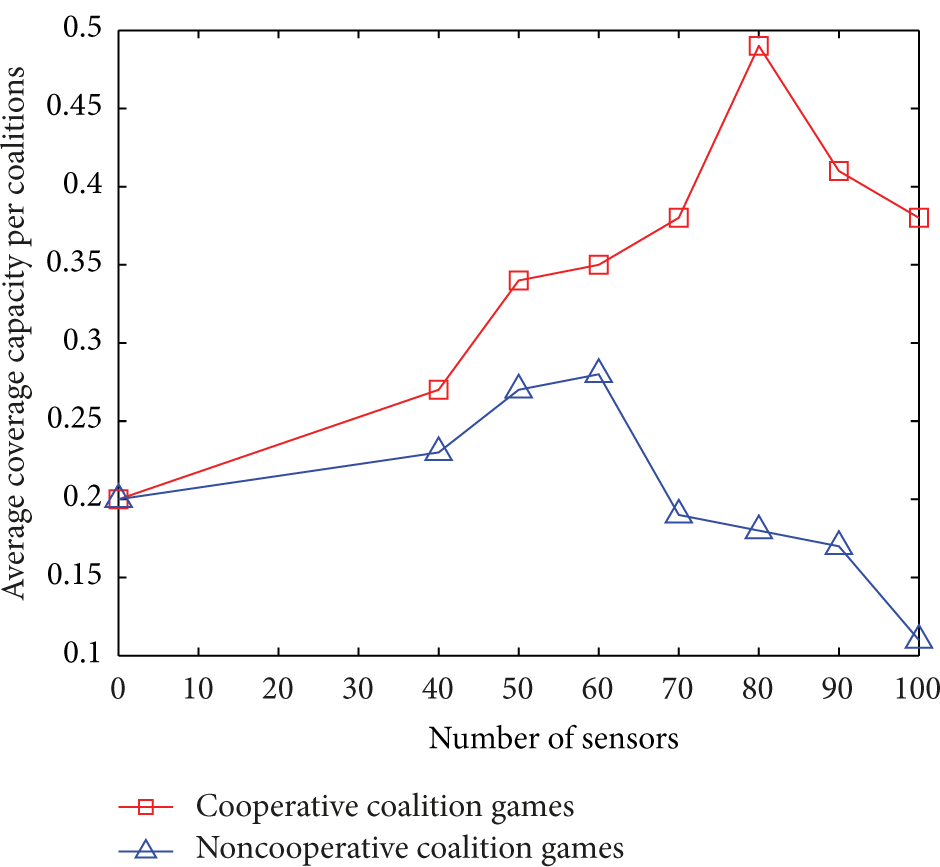
In Case 3, the initial value of coverage capacity is 0.2. Figure 5 shows effect of

Effect of
However, when
The average individual MS coverage capacity payoff for the cooperative intercoverage optimization.

Effects of the power and distance on coverage capacity.
Figure 8 depicts the average individual MS coverage capacity. The
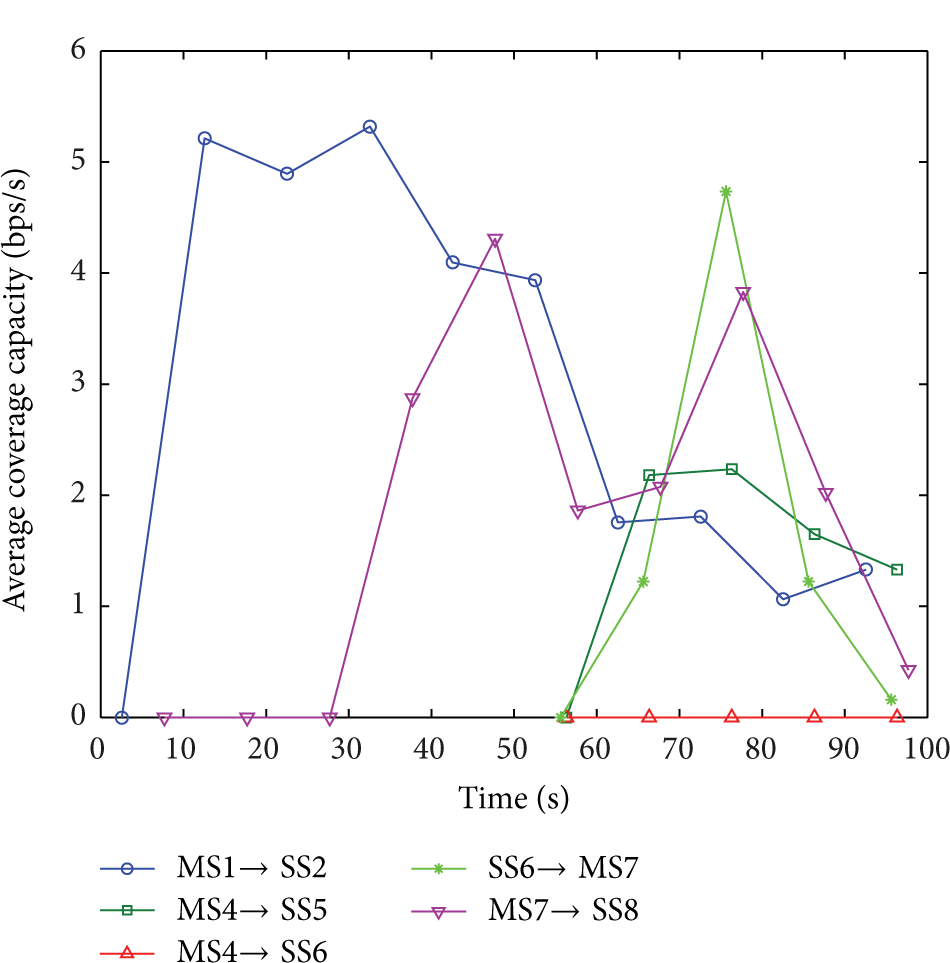
The coverage capacity in cooperative areas.
7. Conclusions
In this paper, we have presented an optimization framework to improve intracoverage capacity and intercoverage capacity in a mobile sensor network. We formulated a coverage capacity maximization problem that jointly considered the power and distance control between MSs and SSs and an interference control among MSs. For the studied power and distance control problem between MSs and SSs based on noncooperative evolutionary game, our proposed algorithm reached a stable Nash equilibrium. For the studied interference control problem among MSs based on cooperative evolutionary game, the Nash equilibrium exists and the proposed algorithm reaches the stability. The numerical simulation results have shown that the proposed noncooperative strategy in noncooperation area can attain maximization intracoverage capacity gains, and the proposed cooperative strategy among MSs can improve intercoverage capacity gains.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was partly supported by the National Natural Science Foundation of China under Grant no. 61272034, Zhejiang Provincial Natural Science Foundation of China under Grants no. LY12F02019 and no. LY13F030012, the Research Start-Up Foundation of Jiaxing University under Grant no. 70512020, and the Scientific Research Foundation of Zhejiang Provincial Education Department of China under Grant no. Y201431192.