
Abstract
This paper proposed a mathematical model to investigate the radial expansion induced loosening of rectangle thread bolted joints that were subjected to cyclic temperature variation, which could cause slippage between contact pairs of engaged threads and bolt bearing. Firstly, integral equations were derived for the shear stress components caused by expansion difference, as well as the bearing and thread friction torque components, which depended on the temperature variation. Secondly, the relationship of displacement components was developed based on quasi-static hypotheses. Then, treating the rotation of bolt as plastic elongation, the bolt tension's evolution was obtained by using a one-dimensional bolted joint model. Numerical results showed that the temperature variation decreased the bearing and thread friction torque components, which could lead bolted joint to loosen. Finally, the effects of some associated factors on the progress were discussed.
1. Introduction
As one of the most commonly fastening means, bolted joints are widely used in engineering components and structures. In engineering application, many important bolted joints may be subjected to cyclically thermomechanical load, such as the ones in engine and turbine, which are crucial to the transmission of force (or torque), ensuring the performance of sealing structure.
It is well known that bolted joints may loosen [1] when transversal loads are applied on them. However, bolted joints’ clamp load may also decrease gradually when being subjected to cyclically temperature variation, and it should seem as loosening as well.
There are two main mechanisms for loosening induced by temperature variation: (1) plastic deformation and creep behavior of materials; (2) relative motions caused by expansions difference. For the first mechanism, many relative researches have been done [2, 3], while few works have been taken out for the second one.
There are two main modes for relative motions caused by expansion difference: (1) relative motions between clamped parts caused by their expansion difference; (2) slippage between thread contact surfaces while inner and outer threads expand differently. The first one works as transversal load [4, 5] on the joints, and transversal load induced loosening has been studied by many researchers. Radial expansion difference between inner and outer thread may cause relative slippage. Once it happens, relative rotation between bolt and nut will take place. Meanwhile, rare studies are undertaken on this issue. A mathematical model has been established in this paper to investigate the mechanism for rectangle thread bolted joints. And associated factors on the progress, including the effects of preload, friction coefficient, amplitude of temperature cycles, number of engaged threads, thread clearance, and length of bolt have been discussed, respectively.
2. Loosening Mechanism of Radial Thermal Expansion
As rectangle thread is shown in Figure 1, if the thermoexpansion difference between inner and outer thread (A and B) is assumed as α A − α B = Δα, when temperature increases, there will be expansion difference in radial direction. As the temperature variation is ΔT, the expansion difference at point P, which can also be regarded as the total shear strain, should be

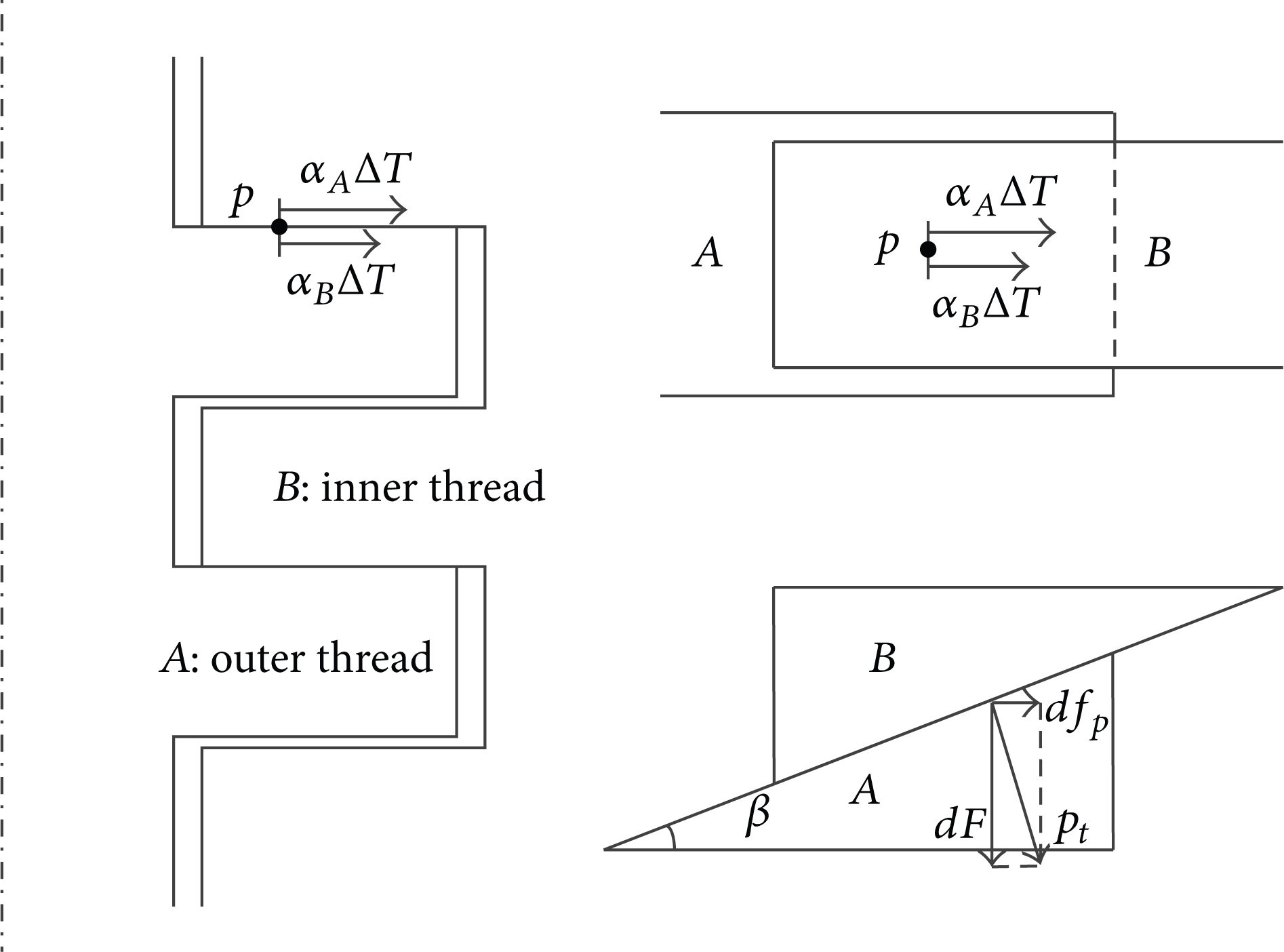
Temperature variation caused radial relative motion.
If their shear modules are G A and G B , respectively, their shear strain should be
And the shear stresses at contact surface can be expressed as
Assume that G A ≈ G B ≈ G; then τ A and τ B are equal to GΔαΔT/2, and the friction force at this point in the radial direction can be obtained:

where dS is the differential area at the point.
If column friction is employed, the critical friction force at this point will be

where μ is the friction coefficient between thread contact surfaces, and p is the contact pressure.
As p remains unchanged, when the temperature increases, the friction force df r induced by thermoexpansion may exceed the critical friction force dfcrit. On condition that static friction and kinetic friction have the same coefficient value, df r will reach then being a constant as dfcrit; then relative slippage will take place. If the helix angle is considered, part B will also go down along A. While temperature decreases, shrink difference may cause the relative motion, too.
3. Mathematical Modeling
In addition to not considering expansion in bolt axial direction and influences of plastic deformation, some hypotheses are made as follows.
All material parameters of parts of the joint are the same, except for thermoexpansion coefficients in radial direction.
The relative motion progress induced by temperature variation can be characterized as quasi-static.
The value for static friction coefficient and kinetic friction coefficient is the same.
The contact pressure forms of bearing and thread contact pairs are both uniform.
3.1. Mechanical Analysis at Contact Pairs
As contact pressure is assumed to be uniform, if the clamp force is F, the contact pressure on the under head bearing surface p b is given by

where r e and r i are external bearing radius and internal bearing radius, respectively.
If the number of engaged threads is m, the contact pressure on the thread surface p t is [6]

where rmaj and rmin are major thread radius and minor thread radius, respectively.
For rectangle thread, thread profile angle 2α = 0, so

And the critical shear stresses at contact pairs could be obtained:
Then, the critical friction forces should be

In the cylindrical coordinates, whose z-axis is the bolt's center line, the expansion induced friction forces are in the radial direction. If there is no relative motion appearing, the stresses and friction forces in the radial direction are

The friction forces that can be used to sustain the pitch torque component are

Then, the maximum friction torques can be got

Pitch torque, which drives bolts (or nuts) to rotate in the loosening direction, can be expressed as [7]
3.2. Variations of Friction Torque Components during the First Heating Segment
The maximum friction torques variations as temperature increases are shown in Figure 2, under the calculated conditions that are given in Table 1.
Initial condition to calculate the friction torques variations.

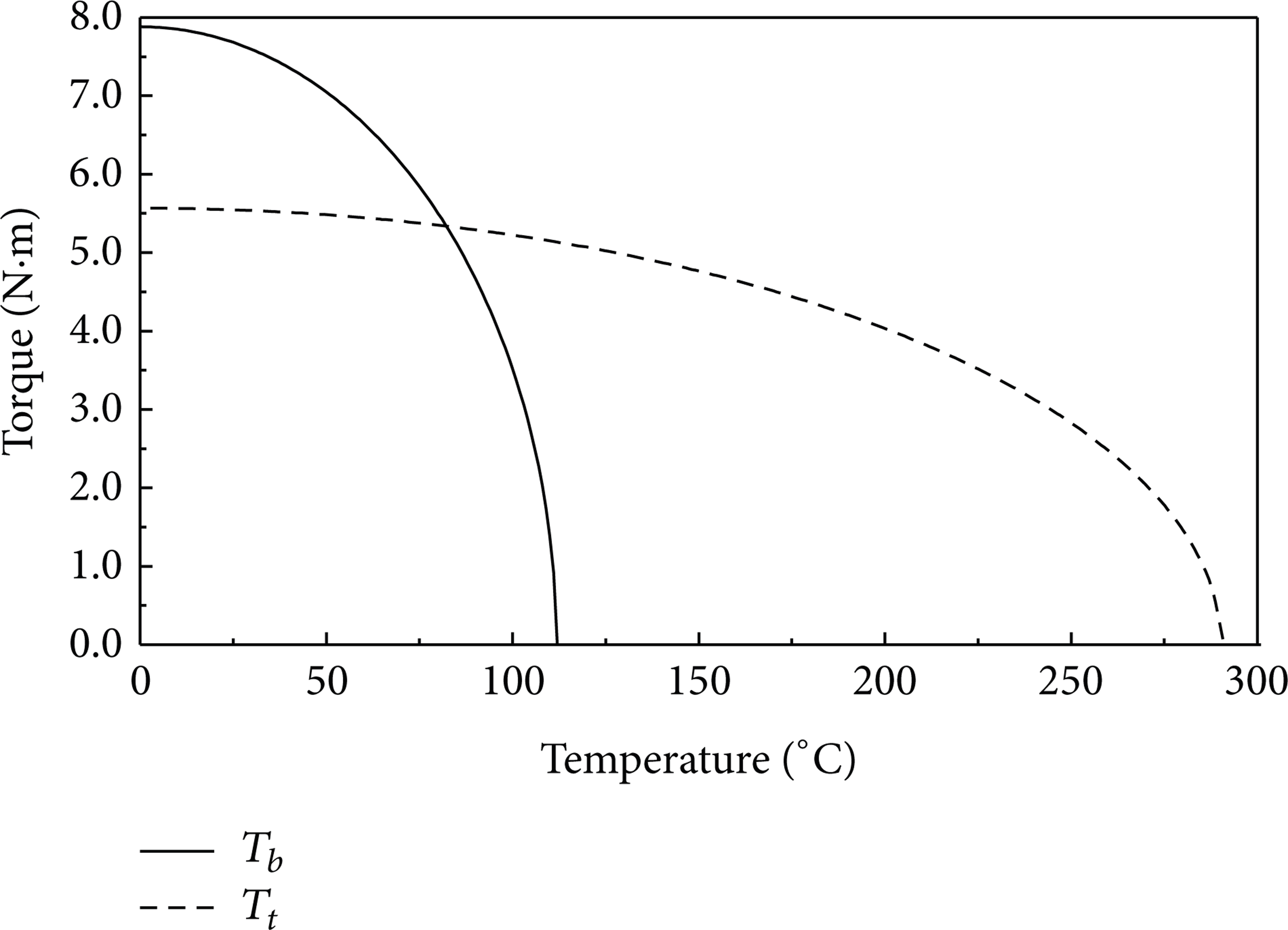
The maximum friction torques variations as temperature increases.
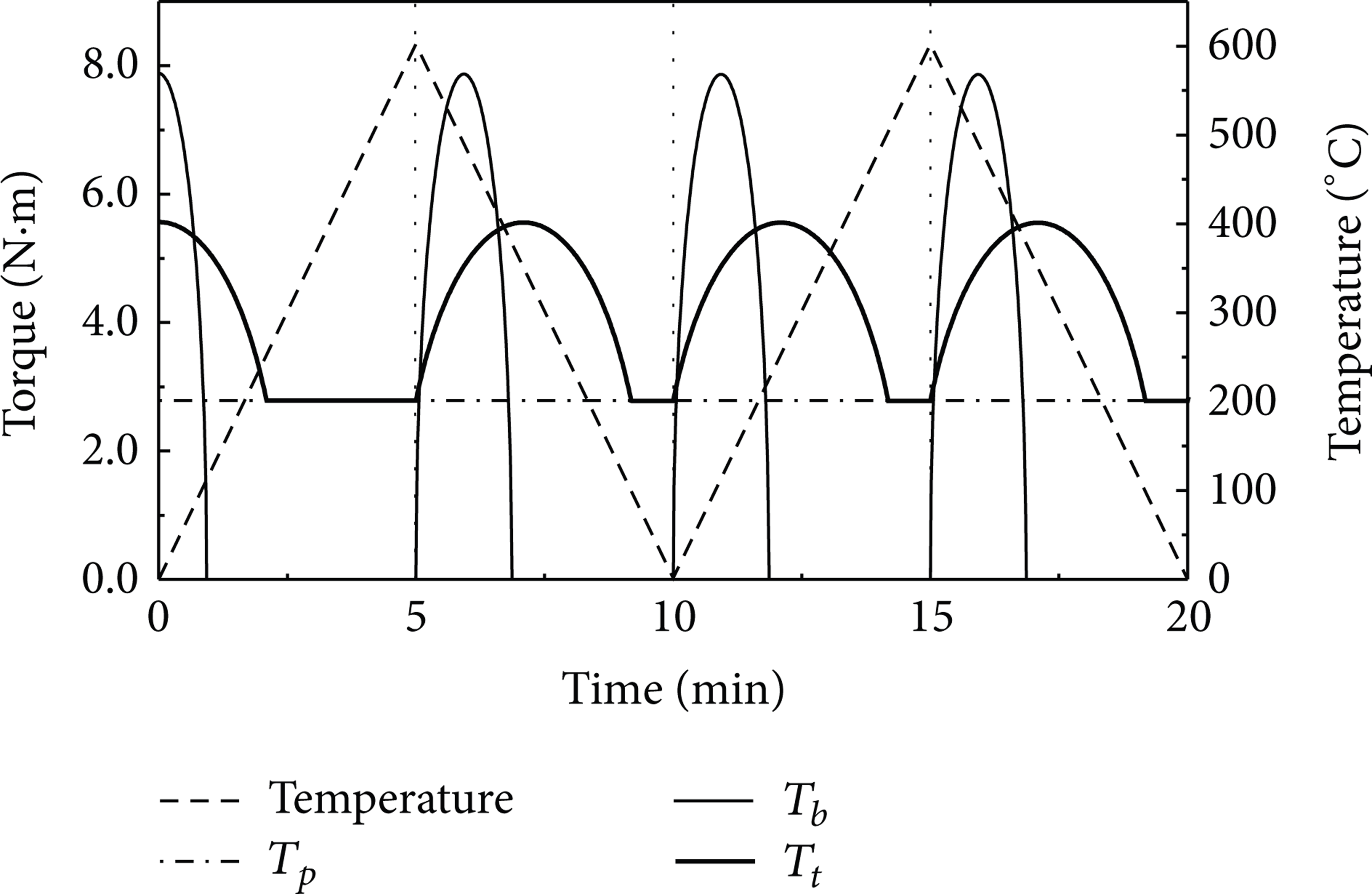
The comparison between total friction torque and pitch torque is shown in Figure 3. The cross-point of dashed line and solid line indicates T p = T b + T t , which means friction forces and toques have reached their limits. At that temperature, the bolt is under unstable mechanical equilibrium, and any extra external force or additional temperature change may drive the bolt to rotate:

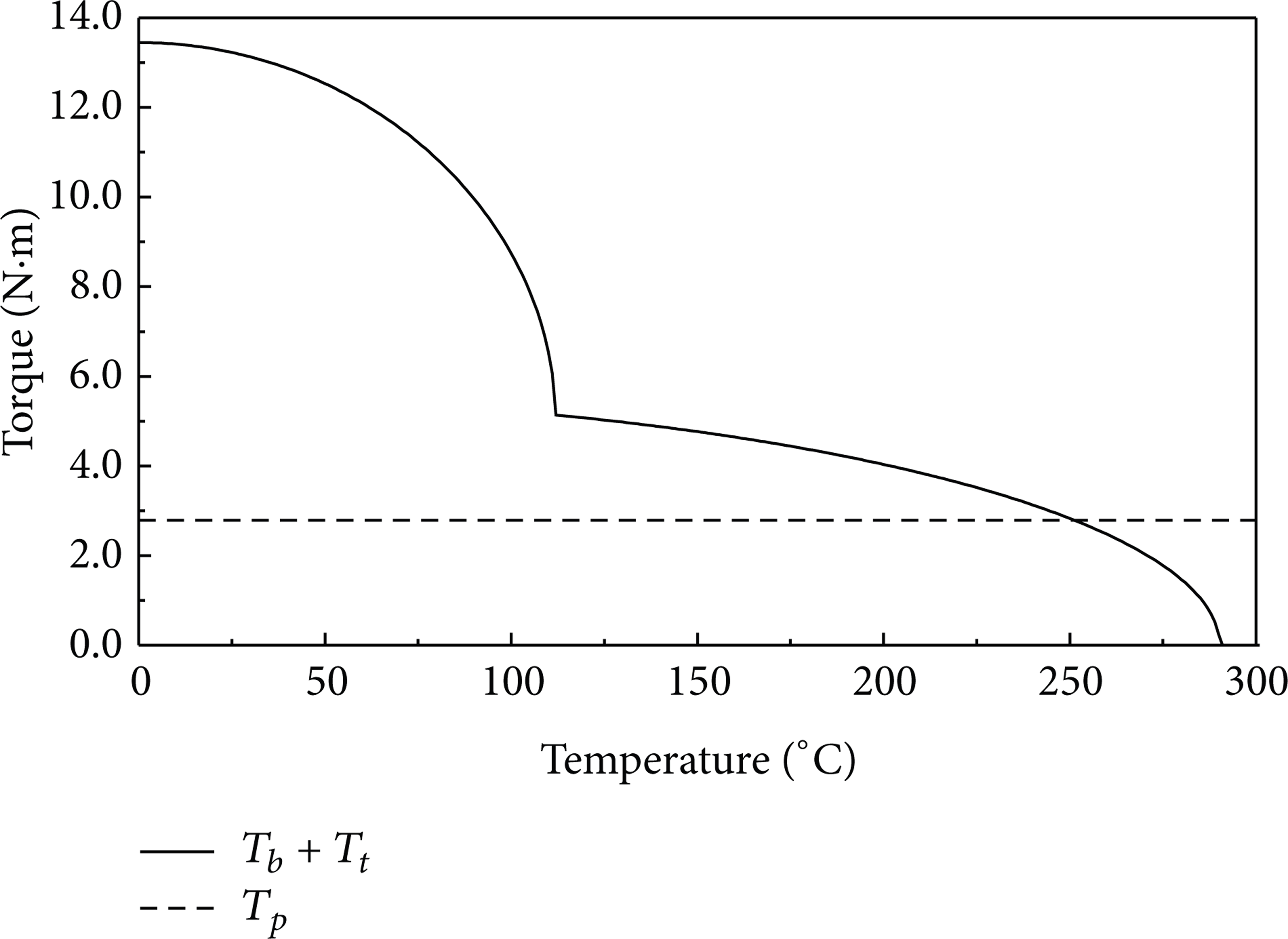
Total friction torque versus pitch torque.
If the temperature keeps on rising, relative slippage will take place, and bolt starts to rotate.
As shown in Figure 3, maximum bearing friction torque T b is much bigger than maximum thread friction torque T t at the very beginning stage. But as the contact area of bearing surface is bigger than the one of thread surface, its contact pressure is much smaller. With the temperature rising up, the relative friction torque decreases faster. At 82°C, T b becomes smaller than T t . When being at 111°C, T b decreases to zero. Meanwhile, T t is still greater than pitch torque. The temperature at which the joint starts to rotate is 251°C.
Since T b vanishes much earlier than the joint goes to loosen, the loosening condition (15) is predigested as (16) in the following analyses:

To estimate whether the bolt will rotate or not during the process of temperature increasing, (16) can be written as

And the temperature increasing increment which will cause relative motion should be

Therefore, to a certain bolted joint, the critical temperature increasing increment which can induce relative motion is in proportion of the preload. For the joint shown in Table 1, the relationship can be expressed as

If the preload is 30 kN, the critical temperature increasing increment should be greater than 753°C. Consequently, it seems that the radial expansion induced loosening can be totally ignored when the joint has a clamp load of a huge value. But in fact, as the temperature increases, friction torque vanishes rapidly, and if the joint is subjected to transversal load at the same time, the joint may loosen more easily, and then the situation will be more complex.
3.3. Friction Torques Variations during the First Cooling Segment
Under the quasi-static hypothesis, several results can be acquired when slippage has already taken place at the highest temperature of the process. The bolt is under unstable mechanical equilibrium, the bearing friction torque is zero, and all friction forces at points of bearing surface are used to sustain radial expansion. At the same time, thread contact surface balanced all the pitch torque, and residual friction forces stand against radial shear forces caused by radial expansion. Radial shear forces at thread contact surface caused by radial expansion are greater than the ones at bearing contact surface.
As temperature decreases, radial shear forces reduce. Once the force reaches zero, the maximum friction torque is resumed; however the temperature at that time is higher than the initial value. If the temperature keeps on decreasing, radial shear forces will increase in the opposite direction and may reach their limits in the opposite direction. Thus, there are two scenarios as follows.
(a) Temperature Is Still Decreasing after Radial Shear Forces Reach Their Opposite Limits. In this scenario, relative motion will happen in the decreasing process of temperature, then causing the joint to continue loosening. If the temperature increases again, the phenomenon of loosening keeps happening.
(b) Radial Shear Forces Never Reach Their Opposite Limits. If radial shear forces never reach their opposite limits, relative motion will never take place even when the temperature drops to its lowest value. Once the temperature increases again, radial shear forces may only reach their limits, but the bolt will never rotate further in the loosening direction.
However, as the bolted joint is shown in Table 1, if the temperature varies cyclically, its amplitude that can cause the joint loosen gradually is at least a double of 251°C. Hence, if the initial temperature is ambient temperature of 20°C, the highest temperature of the cyclic process should be at least 522°C to loosen the joint gradually.
In the process of temperature decreasing, bearing friction torque vanishes in the first place as well. Thus, thread friction torque is still the key which decides whether and when relative motion happens. Consequently, bearing friction torque can be ignored in the cyclic analysis of the problem.
3.4. Displacement and Clamp Force Analysis
Once the bolt starts to rotate, friction stress components at each contact point are τ tr and τtθ, and the displacement direction should be same to the direction of friction force. Hence, the ratio between displacement components should be equal to the one of stress components:

And if the temperature exceeds its critical value as ΔT, the expansion induced radial displacement should be

Thus, the displacement component in the loosening direction is

The angular displacement of the bolt is

Angular displacement of ϕ′ can be regarded as a bolt's elongation of ϕ′p/2π. The rotate can be considered as a kind of plastic deformation:

3.5. One-Dimensional Model of Bolted Joint
As is shown in Figure 4, the bolt joint is predigested as a one-dimensional. Before preloading, the bolt and the joint have length of l b and l J , respectively. After preloading, their elongations are Δl wb and Δl J , and their deformation relationship can be obtained as

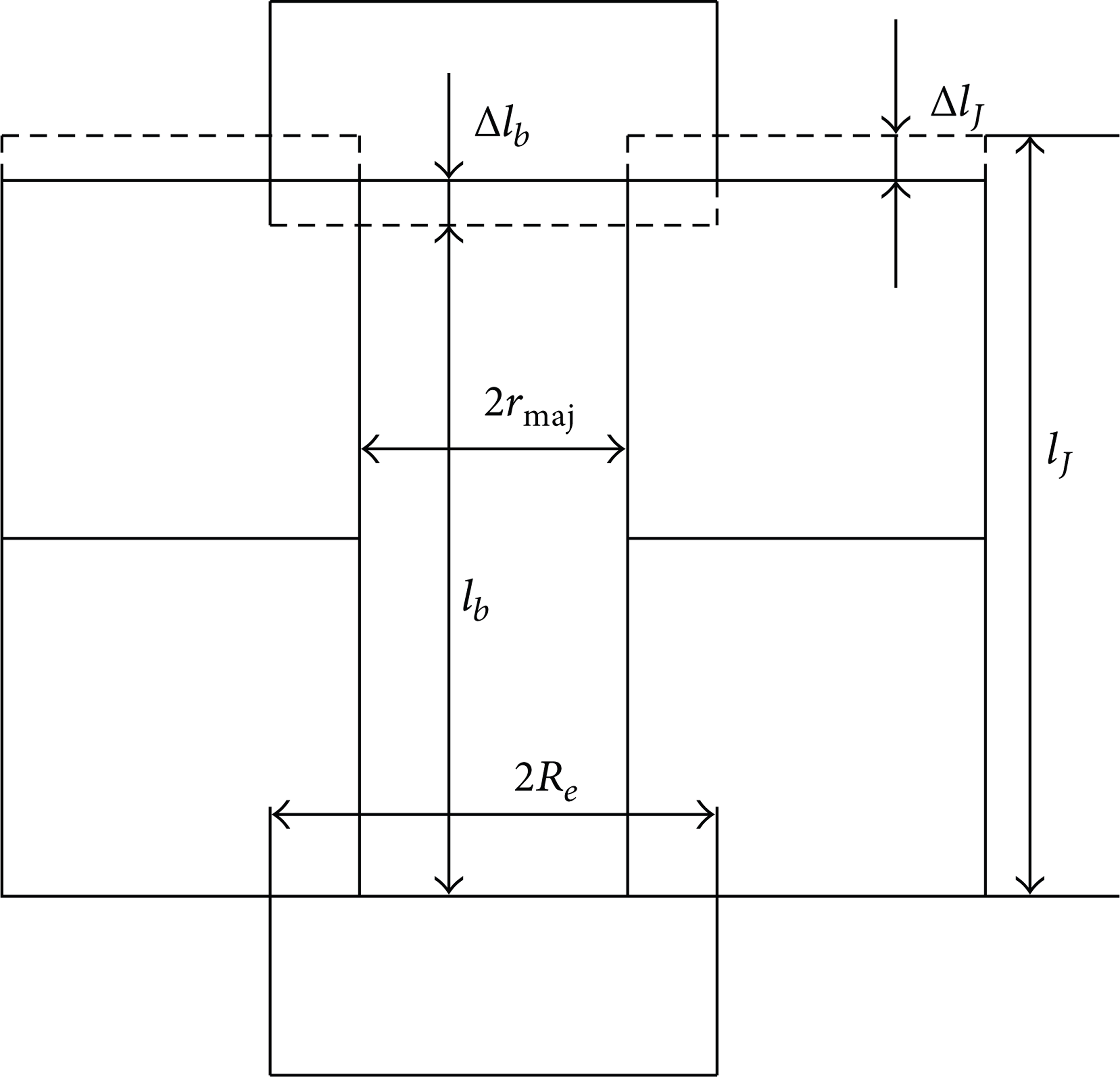
One-dimensional model of bolted joint.
If only elastic deformation and bolts rotation are considered (creep, plastic deformation, and expansion in bolt axial direction are all ignored), (25) can be written as

where ∊ be and ∊ je are elastic strain of the bolt and the joint, respectively.
Based on the force equilibrium in the bolt axial direction, it can be obtained that

Then, by deformation relationship (26) at the initial state and with a rotation induced “elongation” of ∊ r , a set of equations can be acquired:

Thus, axial stress and tension in the bolt are

3.6. Bolt Tension's Variation as Temperature Varies Cyclically
Under quasi-static hypothesis, it is assumed that when loosening takes place, thread friction torque is equal to pitch torque. Then, (16) can be written as

As a result, the critical radial shear stress τ tr ′ can be obtained:

In the calculation of bolt tension's variation when temperature varies cyclically, the Matlab program calculates the radial shear force τ tr based on the assumption that there is no relative motion taking place firstly. Then, its absolute value |τ tr | is compared with τ tr ′. If |τ tr | is smaller than τ tr ′, the assumption of none relative motion is reasonable; otherwise, the difference is obtained. And responding temperature difference is used to calculate the radial displacement component as (21)–(23), after which the angular displacement of bolt is acquired, and bolt tension is updated. The flow chart of the program is shown as Figure 5.
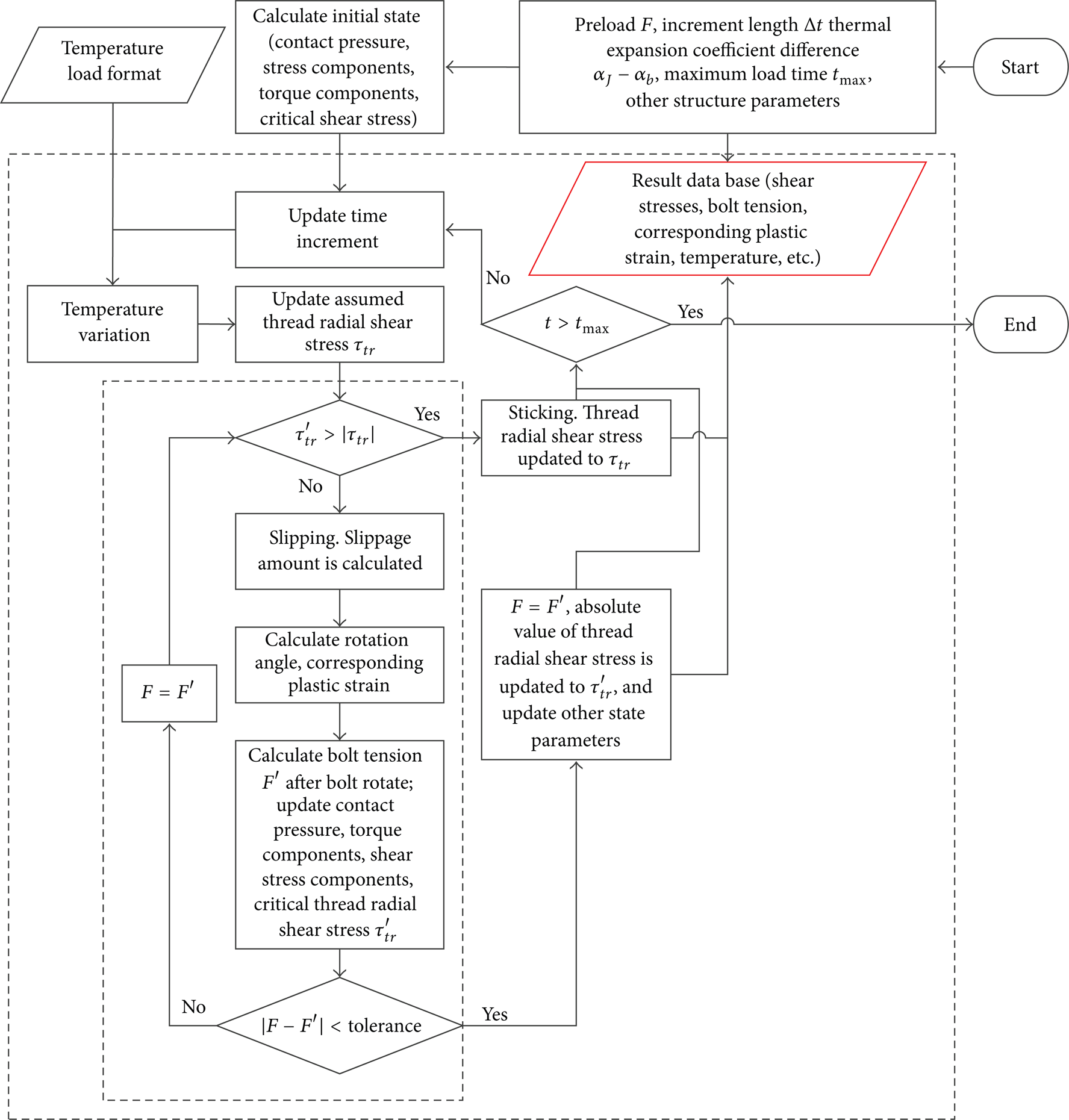
Flow chart of the program.
4. Result and Discussion
For bolted joint with structure parameters and initial state which are listed in Table 1, variations of bolt tension, bolt rotation angle and friction components are shown in Figures 6, 7, and 8, according to the cyclically change of temperature.

Variation of bolt tension.

Variation of bolt rotation angle.
Evolutions of torque components.
It can be obtained that the bolt keeps on loosening when the temperature increases or decreases to some critical values. The value of the reduction of the bolt tension during the first segment of heating is greater than the values during the following segments. When slippage takes place, the temperature at which the radial shear stress is zero has changed from the initial one.
From the evolutions of the torque components, both T b and T t are at their peak value at first and then reduce during the first segment of heating. In the first segments of cooling, radial shear stress goes down, T b and T t resume to their maximum values gradually. With the temperature keeping on decreasing, radial shear stress reaches zero and then augments in the opposite direction, which can make friction torques fall again. Before temperature reaches its lowest limit, slippage takes place and bolt tension decreases again. During the temperature variation, the rotation angle of the bolt gains gradually.
In the following cycles, each time the direction of the temperature changing is changed, both T b and T t resume to their maximums at first and then vanish to their minimums. However, they will not reach their maximums at the same time (or at the same temperature).
4.1. Effect of Preload
The evolutions of bolt tensions of bolted joints with preloads of 5 kN, 8 kN, 10 kN, 11 kN, and 12 kN are compared in Figure 9, respectively. To facilitate the comparison of the variations of bolt tension, bolt tensions are expressed as the percentage to their initial values, as shown in Figure 9. Equation (19) has given the relationship between preload and the temperature that could induce relative motion for bolt joint as in Table 1. However, the same conclusion can also be obtained from Figure 9, in which the temperature at which the joint starts to loosen decreases as preload reduces. With the increasing of initial tension, the distance between the critical temperature and the peak temperature becomes smaller, and the tension drop during single segment of heating (or cooling) is smaller, as well.
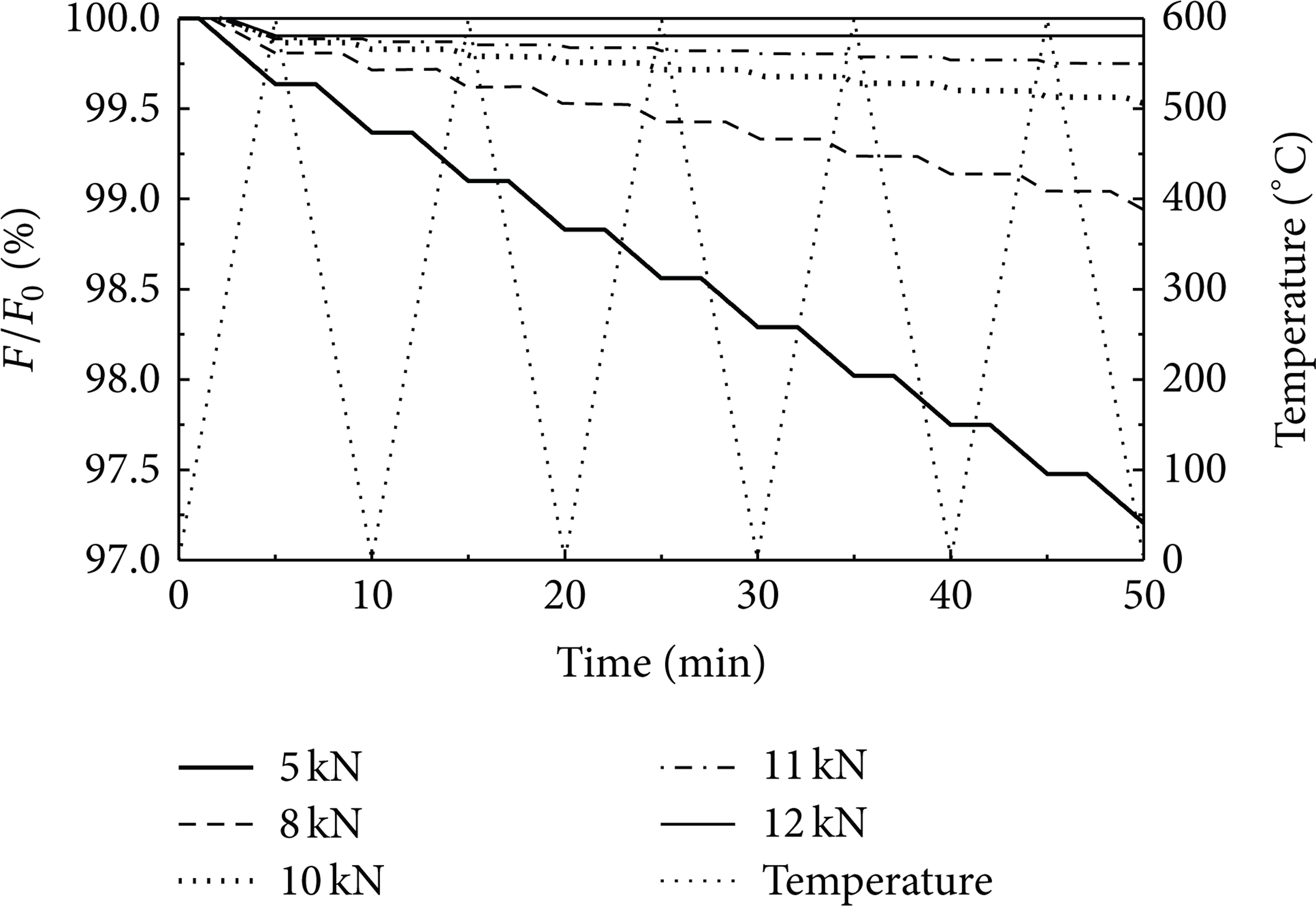
Effect of preload.
If the preload is 12 kN, slippage of thread contact surface takes place during the first segment of temperature variation and the temperature at which radial shear stress is zero increased. In the following segment of cooling, the radial shear stress cannot exceed its maximum in the opposite direction, and the bolt cannot loosen anymore in the temperature cycles (see Figure 9).
4.2. Effect of Friction Coefficient
Figure 10 shows the effect of friction coefficient on the loosening process. When preload is set, the pitch torque is determined. But critical friction force and torques, as well as the critical radial shear stress, vanish rapidly with decreasing the friction coefficient. For the situation that friction coefficient is 0.05, bolt tension drops rapidly as the temperature cycle is being repeated. Meanwhile, the phenomenon of loosening is not keeping on when the coefficient is 0.11.

Effect of friction coefficient.
4.3. Effect of the Amplitude of Temperature Cycles
By comparing the progress of bolt tension of models with different temperature peaks, the effect of temperature cycles’ amplitude is shown in Figure 11. If the other conditions are the same, critical temperatures will be the same. It means higher temperature peak can produce more slippage, and the bolt can rotate more. Thus, bolted joint will loosen faster when increasing the temperature peak.
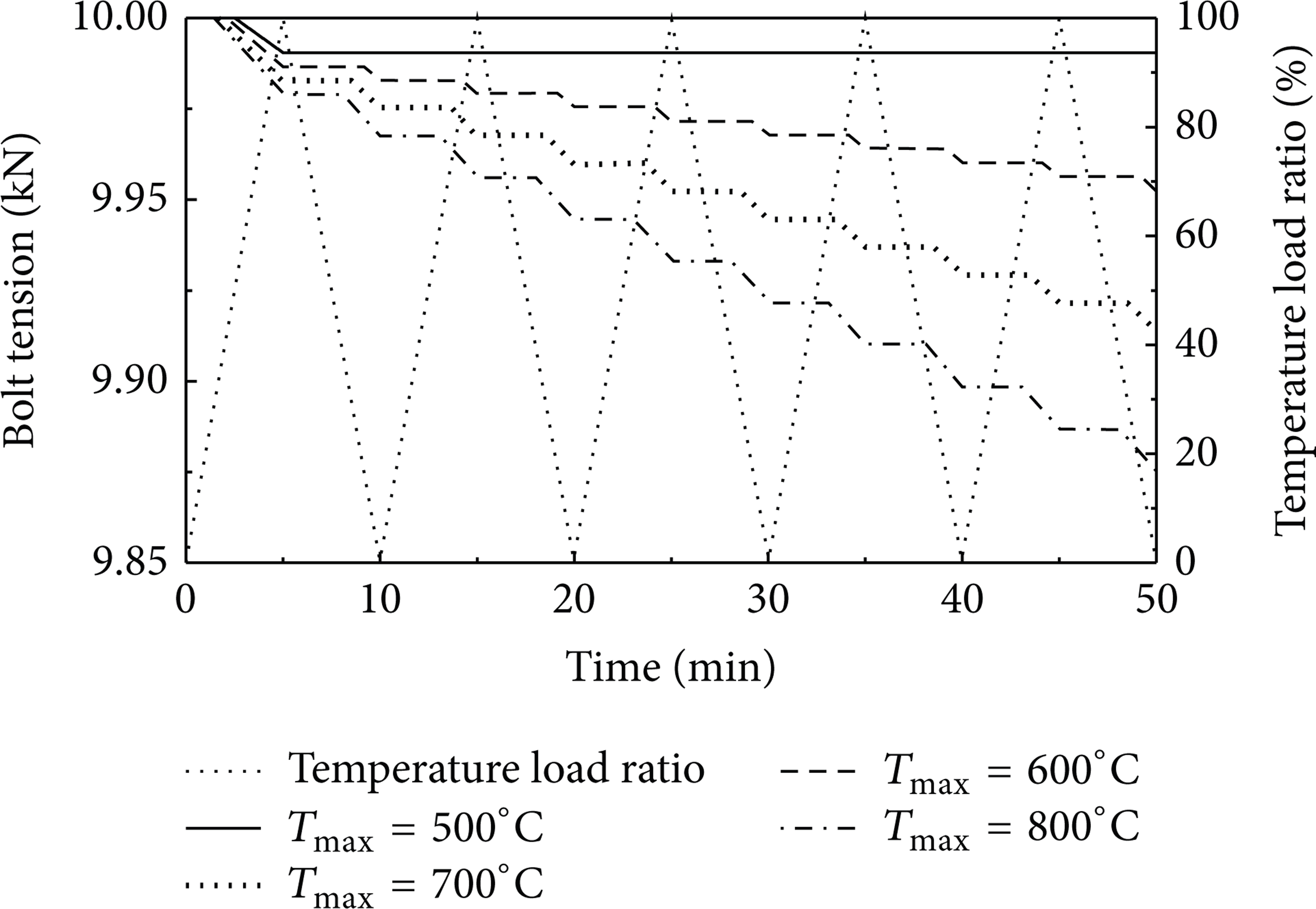
Effect of the temperature cycles’ amplitude.
4.4. Effect of the Number of Engaged Threads
Figure 12 shows the difference of the loosening progresses among the models with different number of engaged threads. It can be noticed that the model with less engaged thread will loosen more slowly. The model especially that just has one engaged thread has much higher critical temperature than the other situations, and it does not loosen during the temperature cycles (see Figure 12).

Effects of the number of engaged threads on the evolution of bolt tension.
Figure 13 compares the different evolutions of torque components between models with 2 engaged threads and with 4 engaged threads. The shape of bolts heads and preload are the same, so underhead friction torques of the two models vary similarly to each other, as well as the pitch torque. Although their thread contact pressures distinguish each other, their thread friction torques still has the same maximum value. However, the main difference is the variation process of the thread friction torques.

Effects of the number of engaged threads on the evolution of torque components.
The contact pressure drops down when the number of engaged threads increases, which means the critical friction force at each contact point decreases. Therefore, the thread friction torque drops faster, and the slippage occurs earlier, which means the joint loosens more easily.
If engaged threads are too much, loosening may happen before bearing friction torque drops to zero; then the mathematical model should be modified. However, from the result of model with 4 engaged threads, bearing friction torque still declines far more rapidly than thread friction torque. Since relative research has pointed out that the first 4 engaged threads in bolt joint can sustain over 70% of the bolt tension, the assumption of “bearing friction torque vanishes first” is still make sense.
4.5. Effects of the Thread Clearance
A greater thread clearance means smaller contact area. So from the analysis above, bolted joint with a bigger thread clearance loosens more slowly.
4.6. Effects of the Length of the Bolt
As aforementioned, bolt rotation angle has no relationship with the length of bolt. Therefore, with the same temperature variation process, joints with different bolt's length have the same bolt rotation angle. But according to (24), the corresponding plastic deformation to the bolt rotation is in inverse ratio with bolt's length. So, longer bolt has smaller corresponding plastic deformation, and joints with longer bolt loosen more slowly.
5. Conclusion
This paper has analyzed the mechanism of radial expansion induced loosening. To study the loosening caused by radial expansion, a mathematical model of the problem for rectangle thread was proposed with appropriate hypothesis, which could provide the variations of bolt load, bolt rotation, friction force, and friction torque under the cyclical changes of temperature. The following conclusions are obtained.
With the temperature cyclically changing, if there is a mismatch between the thermal expansions of the bolt and joint, expansion induced radial shear stress can weaken the friction torques and finally causes bolted joints to loosen.
For bolt joints with certain structure parameters, the value of temperature variation that can produce slippage in the first segment of temperature changing is in direct proportion with preload. The amplitude of temperature changing which can induce durative loosening is at least twice of the value.
The higher the preload and friction coefficient are, the more slowly the bolted joints loosen.
With the increasing of the contact area, the contact pressure becomes lower, and the maximum friction torque after heating (or cooling) is less. Thus, the joint with bigger thread clearance and less engaged threads has higher contact pressure and loosens more slowly.
The rotation angle has no relationship with the length of bolt. Hence, the longer the bolt is, the less the corresponding plastic deformation takes place, and the more slowly the bolt loosens.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This study is based upon work supported by the National Natural Science Foundation of China (Grant no. 51275044).