
Abstract
Wireless sensor networks (WSNs) can provide crucial and real-time information in many crisis response and management scenarios. For example, in volcano monitoring and the rapid reporting of aftershock information, WSNs detect the ground vibration and transmit the information sufficiently fast to help people survive the disaster. However, the processing and transmission of ground vibration data present a heavy burden for the small nodes of WSNs, and a single sensor node cannot provide accurate results for ground vibration detection. In this paper, we present a promising energy-efficient collaborative ground vibration measurement scheme based on efficient compressed sensing method and belief propagation method using the difference in the signal strength to distribute wireless communication load among sensor nodes, improve the detection probability, and extend the lifetime of this system. The performance was studied via theoretical analysis and simulation experiments, and the results indicated that the system could reconstruct the seismic signal even with a low measurement count; other benefits included decreased energy consumption of the sensor nodes and a considerably increased detection probability because of the proposed belief propagation method.
1. Introduction
After a large earthquake, houses and facilities are damaged, and transmission and communication networks are broken. During the emergency rescue procedure, the aftershocks, mud-rock flow, and landslides will result in further damage, casualties, and property loss. To obtain more accurate seismic data, wireless sensor networks (WSNs) nodes can be deployed to the disaster area for uninterrupted surveillance [1]. In another example, volcano monitoring and studies are critical for crisis response and management, which must satisfy the high data rates and high data fidelity requirements of these studies [2, 3]. WSNs are suitable for accomplishing these tasks. WSNs typically consist of small sensor nodes, which act in both data sensing and network transmission roles. Each node consists of a sensor(s), microprocessor, and wireless transceiver. The distributed sensing capabilities and the ease of deployment provided by a wireless communication paradigm make WSNs efficient for capturing data. Sensor nodes are typically powered by limited capacity batteries. To save energy, nodes switch their transceivers off in time and essentially become disconnected from the network. In this dynamic environment, providing real-time communication while minimizing the energy consumption is a significant challenge. However, the energy-efficient operation of WSNs provides longer lifetimes and improved feasibility.
The earthquake observation data, including the original continuous waveform data, are obtained by a seismograph. For example, the Capital-Circle Digital Seismograph Networks of China output a significant amount of observational data, with an approximate volume of several gigabytes per day. Alternately, the Nyquist sampling theorem states that sampling must be conducted at least two times faster than its bandwidth to avoid losing information when uniformly sampling a signal. Thus, there are large amounts of data in this system. Such quantities of data can easily be captured, stored, and transmitted under normal circumstances, but such tasks become challenging when the communication is disrupted during a devastating earthquake. Even considering that there are not a particularly large number of nodes in WSNs for monitoring seismic activity, the seismic data acquirement and transmission loads are still extremely burdensome for these small nodes. For these types of circumstances, we propose a new scheme based on compressed sensing (CS) and belief propagation (BP) to address these issues.
We replace the conventional sampling and reconstruction operations with a more general linear measurement scheme coupled with an optimization to acquire these seismic signals at a rate significantly below the Nyquist sample rate. CS provides an alternative to Nyquist sampling when the signal under acquisition is known to be sparse or compressible [4–7]. As a new sampling theory, CS can maintain the original structure of signals by attaining the nonadaptive linear projections. CS can solve an increasing number of signal processing problems given incoherent measurements without reconstructing signals. Moreover, the number of measurements for most compressed signal processing applications, such as detection, estimation, and classification, is lower than that necessary for signal reconstruction.
Recent publications offer many schemes for obtaining sparse solutions of underdetermined systems of linear equations. Popular methods have been developed from many viewpoints:
CS has the characteristic that it can gather the compressed data directly and obtain more information from less data. For this reason, researchers use it in many applications where the cost of signal acquisition is prohibitive, either because of a high cost per sample or because state-of-the-art samplers cannot achieve the high sampling rates required by the Nyquist sample rate. Examples include radar imaging and exotic imaging modalities outside visible wavelengths. Recently, CS has been extensively applied in the seismic field. Yao used CS to locate seismic sources during the rupture of the 2011 Tohoku-Oki Mw9.0 earthquake in Japan from teleseismic P waves recorded by an array of stations in the United States [26]. Herrmann et al. used CS in exploration seismology [27]. However, these researchers did not apply the CS method to WSNs in the seismic field.
In the ground vibration measurement system using WSNs, sensor nodes are located in nearby positions and gain strong spatial correlation. Therefore, we propose to utilize cooperative detection to mitigate the effects caused by node sleeping, interference, noise, and vibration propagation specification of soil and rocks. The distributed feature of WSNs is suitable for cooperation detection. Furthermore, we can utilize the temporal correlation to improve the system performance due to the periodic sleeping of duty cycle for sensor nodes. Thus, we study the selection problem of cooperative nodes for the collaborative vibration measurement, and cooperative detection may increase the detection probability while also reducing computational complexity.
The correlation of sensor nodes can be expressed with Markov random field (MRF). MRF is a description method for the correlation of multiple random variables, and these variables have a Markov property, namely, the memoryless property of a stochastic process. In MRF, vibrations are measured by calculating the marginal distribution for each unobserved node. In fact, the marginal distribution involves many elements, and these elements may be related to each other. Thus, if we solve the issue with Bayes’ theorem, it will lead to many integral operations. Furthermore, the computation complexity will increase exponentially. BP is a highly efficient message fusion algorithm for performing inference on graphical models in the machine learning field [28]. BP utilizes inference networks to model the correlation of nodes, changes the global integration into local integration, and then passes the message through the networks and obtains the evaluation of the probability distribution. Using this method, the computation complexity increases approximately linearly. Although BP was presented first in machine learning, this algorithm is also suitable to information theory, signal processing, and digital communications fields.
In this paper, we present the collaborative ground vibration measurement scheme based on the CS and BP methods and study the performance with theoretical analysis and simulation experiments.
2. Collaborative Ground Vibration Measurement Scheme
Using WSNs, we can gather and transmit the earthquake observation data of the seismic region and volcano activity. It is a self-organized, distributed, intelligent system comprising low-cost, low-power, multifunctional sensor nodes that are small in size and capable of wireless communication tethered in short distances. These small sensor nodes, which consist of sensing, data-processing, and communication components, leverage the idea of sensor networks based on the collaborative effort of a large number of nodes. The purpose of WSNs is collaborating sensing, collecting relevant information of the object monitored within the network coverage, and transporting the monitored data via short-range wireless multihop communication to the gateway for analysis and processing by the user. Because the sensor nodes typically have limited computing ability and a limited power supply, a primary goal of data gathering is to collect the sensed data at the required accuracy with the least energy consumption.
The architecture of WSNs for monitoring seismic activity is shown in Figure 1. There are two types of nodes in the system: seism monitoring nodes and gateway nodes. Seism monitoring nodes utilize the seismometer to collect the seismic information. Seism monitoring nodes transmit the data to the gateway node. The gateway node equips a satellite transceiver and transfers the information to a server through the communication satellite, satellite station, and intranet network. Therefore, with the satellite link support, we can maintain communication even during a large disaster.
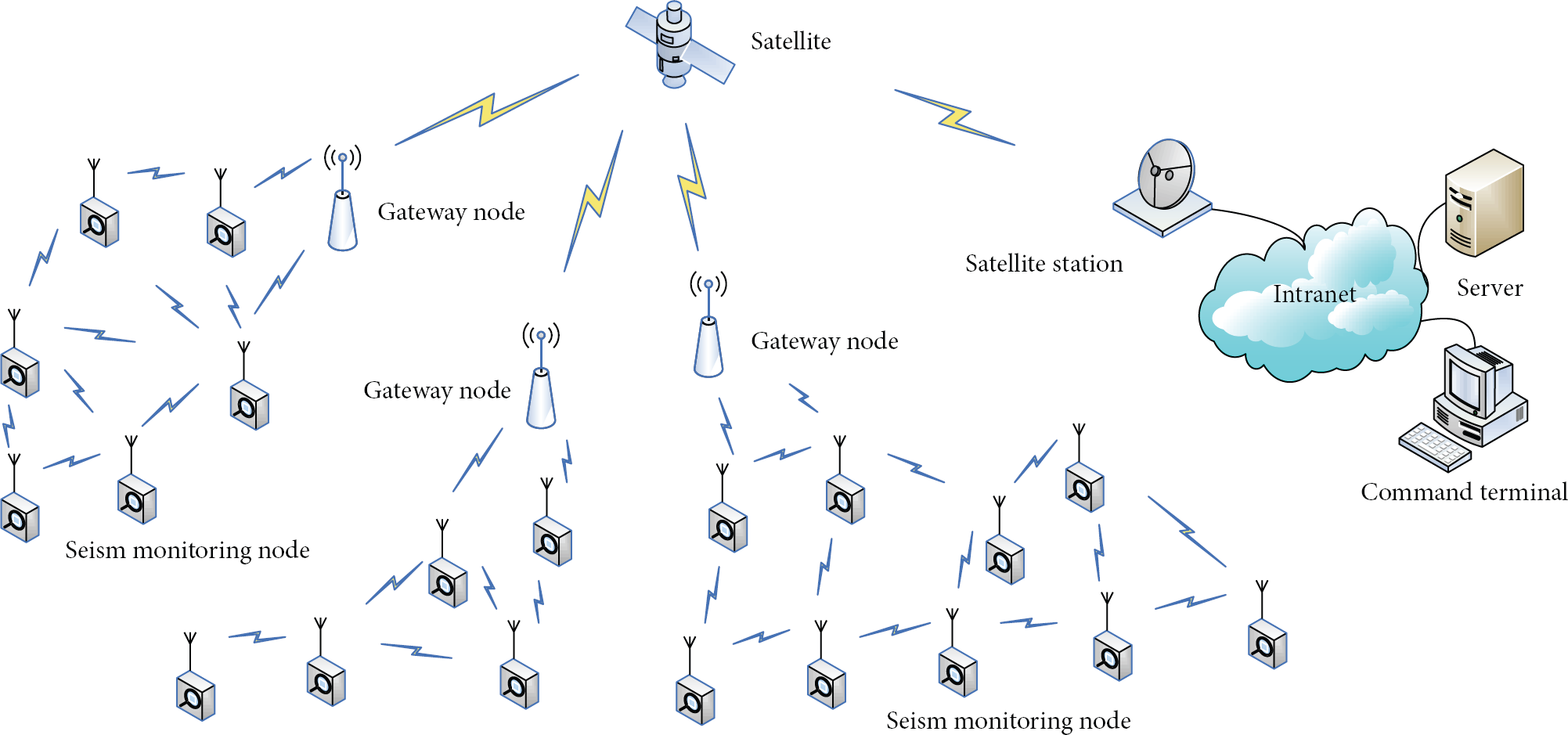
Architecture of the collaborative vibration measurement system.
The seismic information that is collected by the nodes of WSNs can be regarded as a type of continuous variable. Continuous value is obtained from the spot observation, with each piece of data being very significant. However, this produces a heavy burden for the small nodes of WSNs. Due to the rapid development of information technology, use of the CS method with WSNs is an effective technology for mitigating the above-mentioned problems. The type of data being recorded by the sensor nodes can be compressed using the CS algorithm if the data are sparse after being transformed into an alternate domain. Thus, for our collaborative ground vibration measurement system, we utilize the CS method to obtain the seismic data with high energy efficiency.
As a separate consideration, the purpose of this system is to monitor the seismic activity and report harmful vibrations as soon as possible. Thus, this system will rapidly report the ground vibration event and strength via the expensive satellite link and not transmit the seismic waveform data to the server. The seism monitoring nodes first facilitate the compressive sampling and transmit the compressed data to the gateway node. The gateway node possesses a higher computational capability and a larger power supply than the sensor nodes; therefore, this system reconstructs the compressed data in the gateway node and then utilizes our belief propagation fusion method to detect the seismic event using the recovered data. Finally, this system transmits the seismic event to the server via the satellite link. Thus, we will study the highly efficient method of CS reconstruction to retrieve the vibration waveform data. Meanwhile, considering the improvement made to the detection accuracy via the use of these sensor nodes, we present our BP method to obtain the final vibration event result. Our BP method can increase the detection probability considerably.
Finally, the ground vibration event is reported to the server and people in the vicinity of the natural disaster are able to react sufficiently quickly to prevent further damage and save lives.
3. Compressed Sensing Method
CS is a new approach to information acquisition; it is a sampling and reconstruction method based on sparse signal representation using a measurement matrix and approximation theory. It was first introduced by David L. Donoho, Emmanuel J. Candès, and Terence Tao in 2006. According to the theory, as long as the signal is sparse or compressive on some basis, a sample rate considerably lower than the Nyquist sampling theorem is required to obtain the structural information of the signal and accurately reconstruct the signal via a reconstruction algorithm. Thus, the data transmission, storing, and processing are improved considerably.
According to the sparsity requirement of CS, many signals in practice, such as WSNs, image signals, and medical signals, are compressible signals and can be compressed in a convenient basis, such as Wavelet or Fourier basis.
In a typical CS setup, any compressible signal

where

The compressible signal x can be represented as K nonzero coefficients and

where
In addition to strictly sparse signals where
Signal reconstruction is the key component of the CS method. Although reconstructing x from

However, solving this

Therefore, the reconstructed signal is

Both linear programming techniques and iterative algorithms were developed to find the sparsest x from noisy or noise-free measurements. The linear programming solution of CS is known as basis pursuit (BP), which finds the minimum
Orthogonal matching pursuit (OMP) is a greedy iterative algorithm for signal recovery [15]. OMP uses a signal proxy to select large components of the target signal, but it selects one such component in each iteration. However, it does not provide the same uniform guarantees as convex relaxation, and whether it succeeds in the noisy setting remains unknown.
The stagewise orthogonal matching pursuit (StOMP) [16] algorithm is developed from OMP, and successively transforms the signal into a negligible residual. It selects nonzeros by thresholding the output of the matched filter applied to the current residual signal, where the threshold is set above the mutual interference level. It projects the residual on a lower-dimensional subspace complementary to the span of the selected nonzeros. StOMP is effective when the matrix Φ and/or the object x renders the multiple access interference approximately Gaussian.
Bayesian compressive sensing (BCS) is a type of adaptive compressive sensing reconstruction algorithm. BCS considers compressed sensing from a Bayesian perspective, and the compressive sensing measurements are optimized adaptively instead of being randomly determined [29].
Gradient projection for sparse reconstruction (GPSR) solves bound-constrained quadratic programming based on gradient projection algorithms. GPSR performs well for a wide range of applications and is often significantly faster than other schemes [30].
In our WSN system for monitoring seismic activity, the seism monitoring node acquires the seismic information by the measurement matrix and then transmits it to the gateway node over the WSNs. The powerful gateway node reconstructs the signal and carries out the other relevant processes. We use the BP, OMP, StOMP, BCS, and GPSR methods to reconstruct the signal.
4. Belief Propagation Fusion Method
Collaborating ground vibration sensing may mitigate the effect of vibration propagation fading, interference, and the periodic sleeping of sensor nodes. We take three steps to fulfill the ground vibration fusion method: selecting collaborative nodes, constructing the MRF for information fusion, and executing the BP fusion algorithm based on the difference in the signal strength.
4.1. Collaborative Node Selection
According to the collaborative node selection, we assume a certain sensor node as the target node and gain the precise ground vibration information of this target node and the nearby nodes. The collaborative node selection is an important decision, and there are many methods available to confirm collaborative nodes. Due to the diversity of detection probability and false alarm probability for nodes in different positions, it is difficult to determine the optimal quantity of collaborative nodes. It can mitigate the computation complexity to divide the nodes into clusters. To learn the values of such interdependencies within a certain observation window, the NP-BP approach performs automatic clustering of the groups of nodes that observe similar data [31]. However, according to the border nodes of the cluster, the spatial distribution of the measurement results is poor when using this method.
Considering the resource limitation of the WSN nodes, we select the nodes within a certain number of hops to simplify the collaborative node selection. For example, we regard one node as the target node, and the nearby nodes within m hops collaborate to measure the ground vibration. However, the transmission with multiple hops will reduce the throughput of networks considerably. In general, the end-to-end throughput is not more than
4.2. Markov Random Field for Ground Vibration Measurement
After determining the collaborative nodes, we establish the MRF model for cooperative detection. The information of collaborative nodes will be considered from three aspects: the strength of ground vibrations, the position of nodes, and the temporal correlation of vibration measurement in nodes. To improve the temporal correlation of vibration measurement for these nodes, we first synchronize the time in each node with a particular time synchronization method [32, 33], and every node performs the vibration measurement at the same instant following a time interval.
We must consider several aspects to establish the MRF model. First, we select a target node and confirm the relevant nodes to perform the cooperative detection. The topological relationship of these nodes describes the spatial correlation, and thus we refer to the topology of nodes for constructing the MRF model. A network containing loops can be transferred into an equivalent loop-free MRF, and thus each node only needs to exchange information with its neighbor node [34].
A topology of nodes for cooperative ground vibration detection is shown as Figure 2; nodes A, B, D, E, and F have local measurement results, whereas node C does not. We want to obtain the cooperative detection result for node A. To reduce the computational complexity for information fusion, we consider the fact that only neighboring nodes possess the correlation; thus, the topology can be transferred into a pairwise MRF model, as shown in Figure 3. In this MRF model, nodes 1–6 are the hidden state nodes, and nodes 7, 8, 9, 10, and 11 are the observation nodes of nodes 1, 2, 4, 5, and 6, respectively. Node 1 is the target node.
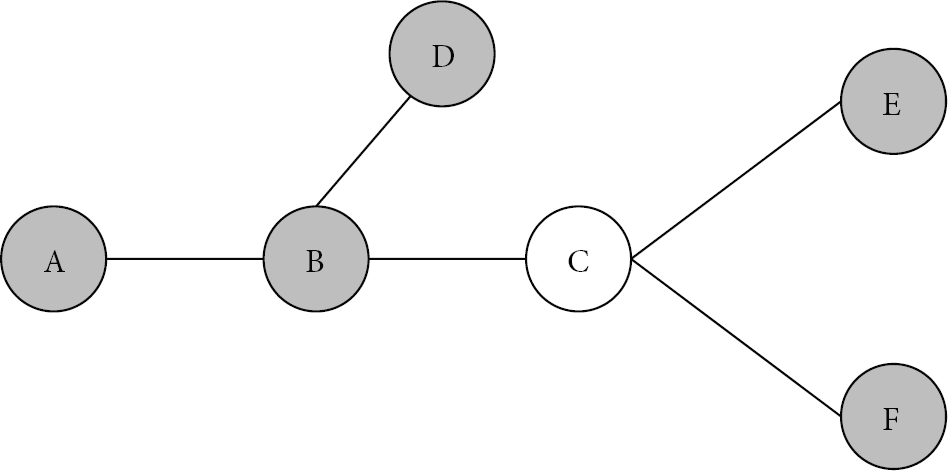
Node topology of cooperative detection.

Demonstration of MRF for cooperative detection.
4.3. Belief Propagation Fusion Algorithm Based on the Signal Strength Difference
We propose a lightweight BP algorithm to address information fusion based on the above pairwise MRF for cooperative detection and considering the resource limitations of WSNs. The MRF mode in Figure 3 is treated as an instance; we determine the expressions of local function and compatibility function of our BP algorithm.
The local function can be divided into two situations. Nodes A, B, D, E, and F have local observation results, and therefore the local function is the statistical result of local observation values. Alternately, node C does not have local observation results, and thus its local function will be inferred from other nodes.
For the first situation, following the hypothesis test theory, we determine whether the result is more than the threshold γ with (8), and when the result is more than the threshold, this is an indication of an aftershock or landslide. Due to the dynamic characteristics, one detection of ground vibration will sample a certain number of acceleration results, and the detection of ground vibration is as follows:
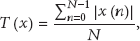
where N is the number of measured signal values,

where
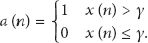
When

where

The other situation for the local function, according to node C in Figure 2 (which corresponds to node 3 in Figure 3), is that the node has no local observation values. In this case, we take the predicted value as the local function. In this paper, we utilize a predicted method based on Markov chains; specifically, we use the local measured results of previous instants to predict the current probability of disaster occurrence,
The compatibility function,
Considering the neighboring nodes i and j, they all have the local measurement results of the ground vibration, and the strength results of vibration are

Referring to the message-passing model in Figure 4, and after determining the local function and compatibility function, the belief of the hidden state node 1 is as follows:

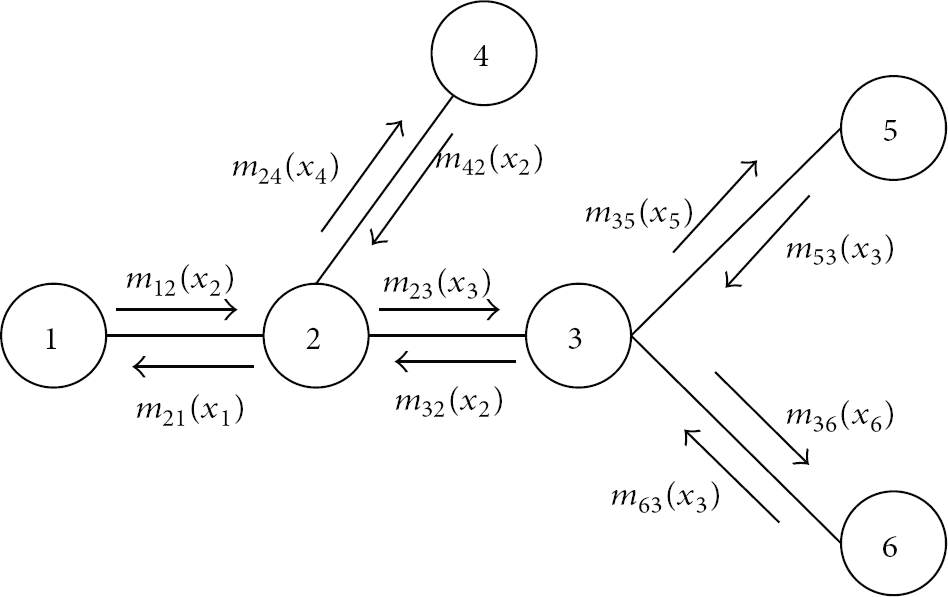
An illustration of the messages passed for the BP fusion algorithm.
Based on the message-passing model, we can obtain

where k is a normalization constant. Therefore, we can obtain the belief of the hidden state node 1 with (14).
5. Analysis and Simulation
When the CS method is applied to the WSNs to monitor seismic activity, we mainly consider two issues: power consumption and detection accuracy. All of the simulations were performed in MATLAB on a Windows system using an Intel Core2 Duo 2.33 GHz processor.
5.1. Theoretic Analysis of Power Consumption for Sensor Nodes
We present theoretic analysis results that demonstrate that CS theory, as a new sampling method used in conjunction with WSNs for detecting seismic activity, is beneficial in reducing the total power consumption.
To evaluate CS, we use a series of 4,096 original analog samples to analyze the power cost and compare between the system with and without CS. We use wavelet basis to project the original sample data and 400 information samples for reconstruction, obtaining acceptable results.
The energy consumption is divided into three parts: the sensing unit, processing unit, and communication unit. In the sensing unit of the CS method, a pseudorandom demodulation scheme serves as the analog-to-information converter (AIC) [35]. Therefore, random projections are facilitated by a demodulator [36] and an analog filter [37], and the energy cost of the AIC can be estimated. We make the following assumptions.
The power consumption for the sensing unit without CS is 600 nJ per sample.
The power consumption for the sensing unit with CS is 9.07 μJ per sample.
The power consumption for the processing unit is 36 mW at 8 MIPS.
The power consumption for the communication unit at the transmission mode is 60 mW at 250 Kbps.
The theoretic analysis results for energy consumption are provided in Table 1; with the CS method, the sensing energy and communication energy are clearly decreased, and the processing energy is also reduced. The total energy consumption with the CS method is only approximately one twentieth of that of the normal method without CS.
Theoretical analysis of energy consumption.

Our results demonstrate that CS can reduce the number of bits that pass through the nodes of the WSNs and thus increase the sleep time for WSNs and minimize power consumption in each node to design low-power WSNs.
5.2. Simulation Experiments of CS
The CS reconstruction performance is a critical aspect for this application. Normally, spike signals are used to study the CS reconstruction performance. Figure 5 shows a spike signal and a real seism signal for 512 data samples. The spike signal contains 50 nonuniform spikes. We obtain 200 measurements using random projections for these two signals and then utilize BCS to reconstruct these two signals (see Figure 6).
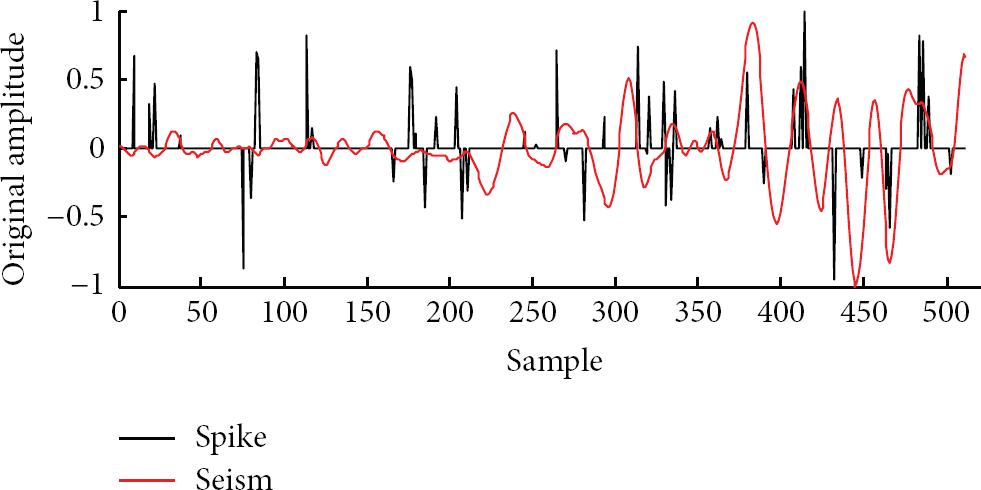
Original samples of spike and seism signals.

Reconstruction results for spike and seism signals.
We find that the spike signal is perfectly recovered with a reconstruction error of 0.028; however, the real seism signal is poorly recovered with a reconstruction error of 1.016, as shown in Figure 6. Seism signals are more complex than spike signals.
Therefore, we use five algorithms to perform the CS reconstruction using real seismic data: BP, OMP, StOMP, BCS, and GPSR. Information measurement counts of 600, 400, and 200 samples are obtained for each reconstruction algorithm, for the 4,096 original analog samples.
We use a set of teleseismic P-wave data from the M4.8 Tangshan earthquake on May 28, 2012, which were obtained from the Hebei Hongshan Seismic Station of China. The original data consist of 4,096 analog samples of seismic activity, as shown in Figure 7. Such signals are known to have wavelet expansions with relatively few significant coefficients. Figure 6 shows that the general CS method performs poorly in treating the real seism signal. Therefore, we utilize hybrid compressed sensing [38] and wavelet transforms to improve the compressed sampling and signal reconstruction. The results of these simulations are given in Tables 2 and 3.
Simulation results for reconstruction errors.

Simulation results for reconstruction times.


Original analog samples of seismic activity.
The BP reconstruction results for 400 measurement counts are shown in Figure 8. The reconstruction error is 0.309 for

BP method for 400 measurement counts.
The OMP reconstruction results for 400 measurement counts are shown in Figure 9. The reconstruction errors for all of the cases are a little larger than those obtained for the BP algorithm. However, the OMP algorithm requires a shorter time than the BP algorithm for

OMP method for 400 measurement counts.
The StOMP reconstruction results for 400 measurement counts are shown in Figure 10. Both the reconstruction errors and times are better than those obtained using the OMP algorithm. Increasing the measurement counts increases the reconstruction time.

StOMP method for 400 measurement counts.
The BCS reconstruction results for 400 measurement counts are shown in Figure 11. Tables 2 and 3 show that the same reconstruction errors are obtained as for the OMP and StOMP algorithms. Increasing the measurement counts increases the reconstruction time slightly.

BCS method for 400 measurement counts.
The GPSR reconstruction results for 400 measurement counts are shown in Figure 12. Tables 2 and 3 show that the reconstruction time is shorter than for the other algorithms. Increasing the measurement counts does not change the reconstruction time. However, the construction errors are somewhat large.

GPSR method for 400 measurement counts.
The simulation results demonstrate that the CS method is feasible for monitoring seismic activity via WSNs. The comparison of the five reconstruction methods demonstrates that the GPSR and StOMP algorithms outperform the other algorithms.
5.3. Simulation Experiments of the Entire Scheme
To evaluate the entire collaborative ground vibration measurement scheme, we apply simulations to analyze the performance. The propagation model of ground vibration follows the logarithmic decrement model, and the noise follows a Gaussian distribution. False alarm probability and detection probability are important performance parameters for evaluating the performance of vibration detection. When the false alarm probabilities of two methods are identical, the detection probability should be as high as possible.
For estimating the performance effects of different numbers of nodes, we set up scenarios with 5 and 10 sensor nodes, as shown in Figures 13 and 14, respectively. In these two scenarios, there are two seismic sources, and node 1 is the target node. We consider three algorithms. The first is our collaborative ground vibration measurement scheme with CS and BP. The second algorithm is an average method that uses one node with CS: after the CS signal is reconstructed in the gateway node from the data of the seism monitoring nodes, the gateway node does not perform cooperative detection and only calculates the average result of multiple measurements of one node, which is considered to be the final result. Here, we use the data of node 1 to obtain the final result for our two scenarios. The third algorithm is an average method that uses multiple nodes with CS; after the CS signal is reconstructed in the gateway node from the data of the seism monitoring nodes, the gateway node calculates the average result of multiple measurements of all of the seism monitoring nodes, and this average result serves as the final result for this algorithm. The parameters of the two scenarios are equivalent except for the number of sensors.

Illustration of the simulation scenario for 5 nodes.

Illustration of the simulation scenario for 10 nodes.
In the simulation experiments for the entire scheme, StOMP is used as the reconstruction algorithm because of considerations of accuracy and reconstruction time. The number of analog samples is
Figure 15 presents the results of the scenario with 5 sensor nodes. The detection probability for the average method of multiple nodes increases with increases in the false alarm probability. However, the detection probability increases slowly, and the growth of the detection probability is linear when the false alarm probability exceeds 3%. The performance for the average method of one node is almost the same as the average method of multiple nodes. In contrast, our collaborative ground vibration measurement scheme exhibits better performance, and the detection probability increases rapidly. For a false alarm probability of 2.8%, the detection probability is approximately 90.6%. For a false alarm probability of 45.1%, the detection probability is approximately 98.1%; however, this result can be improved upon.
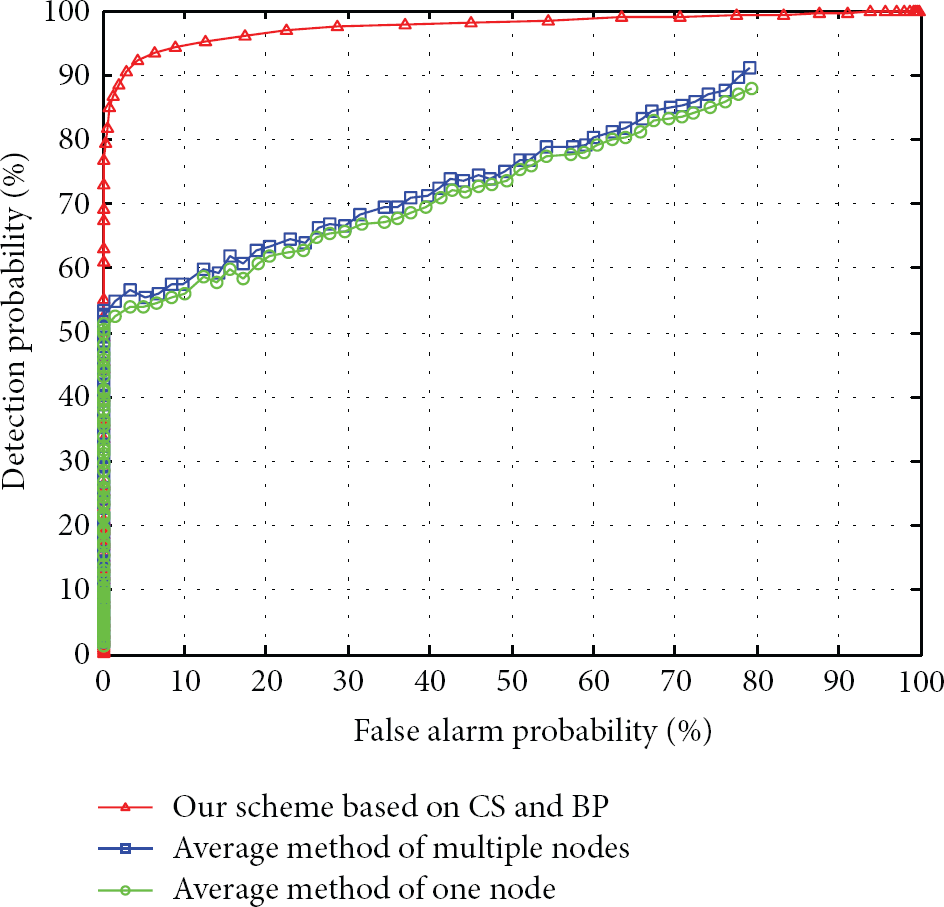
Performance of the simulation scenario for 5 nodes.
Thus, we increase the number of sensor nodes to 10, and the results of vibration detection with that scenario are presented in Figure 16. For the average method of multiple nodes and the average method of one node, the results for this 10-node scenario match the results of the 5-node scenario. However, in this scenario, the detection probability of our collaborative ground vibration measurement scheme based on CS and BP increases rapidly with increases in the false alarm probability. For a false alarm probability of 0.1%, the detection probability is approximately 97.4%. For a false alarm probability of 0.4%, the detection probability is approximately 98.6%, which corresponds to outstanding performance.

Performance of the simulation scenario for 10 nodes.
6. Conclusion
In this paper, we present CS and BP-based seismic data measurement scheme in WSNs. With the flexibility and easy deployment of WSNs, we can monitor earthquake or volcanic eruptions that cannot be monitored with traditional methods. However, the high data volume is a challenge for small WSN nodes. Thus, we present the promising CS technology to mitigate the wireless communication load, data processing, and caching complexity for such nodes. We analyze the energy consumption with and without the CS method and provide results that indicate that CS-based sensor nodes can reduce the energy costs. We compare five CS reconstruction methods using real seismic data and demonstrate that the GPSR and StOMP methods outperform the other three algorithms in general. Considering the improvement made to the detection accuracy via the use of these sensor nodes, we present our BP based on signal strength difference method to obtain the final vibration event result. We verify the entire scheme via simulations, and the results demonstrate that this scheme effectively improves the system performance.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by the Science and Technology Program Project of Hebei Province under Grant no. 12270325, the Special Fund of Fundamental Scientific Research Business Expense for Higher School of Central Government (Projects for creation teams) under Grant no. ZY20120104, and the Scientific Technology Research and Development Plan Projects of Langfang under Grant no. 2013011021.