
Abstract
Most applications of industrial wireless sensor networks (IWSNs) should converge process data generated by each node to the central manager. The data collection operation results in an important communication primitive referred to as convergecast. Convergecast is a many-to-one communication paradigm as a critical functionality deployed for industrial monitoring and control. Delaying of process data may degrade the overall control performance and even lead to the malfunction of industrial applications. Therefore, timeslot and channel resources should be scheduled efficiently for real-time communication. This paper is interested in determining a TDMA schedule that minimizes the number of timeslots and completes convergecast with a limited number of channels. In order to achieve the lower bound derived by theoretical analysis, we proposed a source aware scheduling algorithm for general network. For IWSNs with a fixed number of available channels, we present a source aware scheduling algorithm with constrained channel. According to simulation results, we demonstrate that the performance of our algorithm is close to the lower bound on latency with a limited number of channels. Our algorithm is also scalable for schedules with multiple packets and specific transmission latency of a single packet.
1. Introduction
The emergence of researches on wireless communication has enabled wireless sensor networks (WSNs) applied to industrial applications [1–4]. Several industrial organizations such as ISA [5], WirelessHART [6], and ZigBee [7] have been promoting the development of wireless technology in industrial application. IWSNs improve industrial monitoring and control due to their flexibility, scalability, and efficiency. However, concerns about network latency, reliability, and security along with harsh and noisy industrial environments impose many challenges in designing efficient protocols for IWSNs. The characteristics of WSNs such as limited energy, computing, and storage capability also need to be considered [8, 9]. To operate a control loop, real-time data delivery is instrumental.
The architecture in WirelessHART is designed to be a centralized wireless mesh network which pushes the complexity of ensuring communication performance to a central manager, as in Figure 1. The medium access control (MAC) sublayer of WirelessHART relies on time division multiple access (TDMA) [10] combined with channel hopping to enhance reliable real-time data communication. The contention-free MAC protocols can obtain a deterministic delay bound and eliminate collisions to achieve end-to-end real-time communication. Moreover, TDMA is energy efficient since the amount of idle listening and overhearing can be reduced and retransmissions caused by collisions can be eliminated. Channel hopping makes links with different channels be assigned the same timeslot to scale down the total number of scheduled timeslots. The central manager computes and distributes the transmission schedules of timeslots and channels to all devices based on the global network information. However, the existing standards provide little guidance on how to produce an effective scheduling solution.

The architecture of IWSNs.
In IWSNs, the reliable and real-time communication ensures availability of process data for industrial application. Collection from devices has a designated sample rate to converge these process data to the central manager through multihop transmission. The convergecast transmits a large burst of packets within a period to the central manager. Two kinds of convergecast, aggregated data and raw data, have been studied in [11–13] for aggregated data and in [14–16] for raw data. For many industrial applications, all raw data should be sent to the central manager for low correlation between the data. How to determine a TDMA schedule is a critical problem in minimal number of timeslots using a limited number of channels. The important contributions of our work include the following.
We present a source aware scheduling algorithm which assigns a dedicated schedule to each link of a source path, which requires at most
We present a scheduling algorithm for latency-optimal convergecast with a fixed number of channels. Then we carry out simulations to demonstrate that performance of our algorithm is closed to the derived lower bound on latency for convergecast.
We present a simple modification of source aware scheduling algorithm to handle some nodes with multiple packets. Our algorithm also can guarantee the delivery time of different packets by setting priorities of transmission.
The remainder of this paper is organized as follows. In Section 2, we discuss related works. In Section 3, we describe the problem formulation of convergecast scheduling. We propose the adaptive cross layer scheduling, the lower bound of convergecast scheduling, and source aware scheduling algorithm in Section 4. Section 5 provides the lower bound with constrained channel and the policies for minimum latency with a limited number of channels. In Section 6, we discuss the multipacket scheduling without limited time and with limited time. Some simulation results are shown in Section 7. Lastly, Section 8 draws our conclusion and discusses future work.
2. Related Works
Unlike traditional sensor networks, IWSNs adopt the centralized scheduling algorithm. The motivation for a centralized scheduling is as follows: (1) it could achieve rigorous analysis for optimal schedule solution based on global information, (2) this schedule pushes the complexity of ensuring good performance for link scheduling to the central manager, (3) the central manager determines convergecast schedules using cross layer information because each layer has an impact on the link scheduling, and (4) centralized scheduling is feasible to adopt different algorithms.
TDMA-based protocols could achieve energy-efficient and collision-free packet delivery with deterministic delay bound. Timeslots and channels could be scheduled without interference. These schedules attempt to minimize the number of timeslots required for convergecast communication by few channels. Most of existing algorithms aim to minimize the transmission delay and eliminate interference by time sharing reuse. The scheduling problem required to complete convergecast has been studied in [11–13] for aggregated data and in [14–16] for raw data.
In many applications, the data aggregation is not used, and all the raw data should be sent to the gateway [17]. The raw-data convergecast is useful because the correlation between the data is low and is not predictable. In addition, the devices in the network have no need for complex function for data aggregation. At present, scheduling problems have been widely studied and many formulations have proven that the optimal scheduling is NP-complete [18, 19].
Gandham et al. proved that the latency bound of convergecast scheduling for tree networks is max
Zhang et al. designed scheduling algorithms to establish the lower bound on convergecast by max
Most existing TDMA scheduling algorithms are based on single-channel communication. Recently, many researches have started to emerge which focus on how to efficiently use multiple channels to relieve radio collisions and limited bandwidth [23–26]. Reference [23] showed that the problem is NP-complete which is “the problem of assigning a minimum number of frequencies to receivers such that all the interference links in an arbitrary network are removed.” Multichannel communication supports multiple packet transmissions at the same time, avoids interference and increases throughout. Multichannel communication is also an essential prerequisite for the lower bound on schedule. References [24, 25] proposed node-based channel assignment schemes which coordinate channel switching and transmission. Reference [26] proposed a tree-based multichannel protocol (TMCP) for channel assignment. TMCP partitions the network into multiple subtrees and assigns different channels to each subtree.
3. Problem Formulation
3.1. System Model
In this paper, we construct the convergecast schedule of a multihop network comprising a central manager and field devices. For a multihop path, the earlier hop should be scheduled earlier. These devices have full-function devices (FFD) defined in IEEE 802.15.4 [27] which can serve as routers or sensors. The maximum number of available channels is 16. Time is divided into timeslots with the same size. All the devices are equipped with a single omnidirectional transceiver so that each device can only be scheduled to transmit/receive once a timeslot. Channel hopping proposed by the WirelessHART standard means that the parallel transmissions scheduled at the same timeslot cannot use the same channel. We assume that the network connectivity is fixed over time and every device has an end-to-end convergecast path from the node to the central manager as a source path. We consider application wherein the manager has to receive every data packet sent by field devices in time.
We model the topology of a multihop network as a graph

The system model.
We use
In our paper, we consider devices in IWSNs; the gateway is static and the network connectivity is fixed over time. The maximum length of a packet is fixed and every packet can be transmitted in a timeslot. Each device generates one data packet at the beginning of a convergecast. We assume the drift in the clock of a node is bounded all the time so that synchronization can be achieved. These devices support communication in multiple nonoverlapping channels but only can be scheduled a channel in a decided timeslot. The central manager in these applications has to receive all data packets in time.
3.2. Interference Model
A WirelessHART network should ensure that wireless links whose transmissions may interfere cannot be allocated the same timeslot. The interferences in wireless communication are typically referred to as primary and secondary interference [28]. Two links interfere with each other by primary interference if they share a common device in a single timeslot; that is, the node receives packet from two different transmitters, forwards a packet to two different receivers, or receives a packet from a transmitter and forwards a packet to a receiver at the same time. Two links with no common device interfere with each other by secondary interference if a receiver of a link could receive the packet of another link which does not intend to transmit a packet to the receiver. In order to avoid the occurrence of interferences, WirelessHART allows only a single transmission on any given channel in any dedicated timeslot. In compliance with WirelessHART, all links are scheduled in dedicated timeslots with different channels to deal with interference.
3.3. Problem Formulation
Based on the above models, we focus on providing a time-optimal convergecast scheduling. The schedule finds a source path to the gateway from every device in the network and assigns a timeslot and a channel to each link in the path. The objective of convergecast scheduling is to minimize the total number of timeslots and forward all packets to gateway successfully. We use
T: the device may transmit a packet to a neighbor node.
R: the device may receive a packet from a neighbor node.
I: the device neither transmits nor receives.
Let
Minimize

The objective must be required for schedule to minimize the number of timeslots
4. Source Aware Scheduling Algorithm
In this section, we focus on how to schedule packets from all devices to the gateway as soon as possible and design optimal scheduling policy with minimum latency bound in combination with the characteristics of convergecast.
4.1. Adaptive Cross Layer Scheduling
The convergecast scheduling should take into account cross layer information because each layer could impact scheduling performance, as shown in Figure 3. The physical layer provides available wireless channels for multichannel scheduling. The schedule includes the ordered timeslots and wireless channels from the 16 available channels of 2.4 GHz defined by IEEE 802.15.4. Our scheduling algorithm should deal with the primary interference, because one device cannot perform more than one action in any timeslot due to the inherent property of half-duplex transmission. WirelessHART allows a single transmission-receiver pair on a dedicated channel in any given timeslot to avoid the occurrence of secondary interference.

The adaptive cross layer scheduling.
The network layer provides an end-to-end path in which earlier link should be scheduled earlier. The number of timeslots required for a packet depends on the source path from the source device to the gateway. The order of scheduling should follow the routing order when the source device
4.2. Lower Bound on Convergecast Scheduling
Consider the following theorem.
Theorem 1.
For a routing tree network, the minimum number of timeslots required for convergecast schedule is
Proof.
For the routing tree network, the subtree
4.3. Source Aware Scheduling Algorithm
The central manager could maintain the hop-count

The state of scheduling.
The convergecast scheduling could be regarded as the transmissions from each device to the gateway, as illustrated in Figure 2(d). Each transmission belongs to a subtree with a root node
The node
At timeslot t, if the root node of this subtree has been scheduled, a node
At timeslot t, if the root node of this subtree has not been scheduled, a node
Algorithm 1 assigns timeslots and channels for the schedule chosen by scheduling policies. For each timeslot, the channel 0 should be assigned to the node at the level 1, and the rest of channels could be assigned to other eligible nodes. The time complexity of Algorithm 1 is
Source aware schedule.

(1) Input: (2) Output: (3) (4) (5) Schedule (6) (7) (8) Choose available schedule set S by Policy 2 and 3, (9) (10) (11) (12) (13) (14)
Theorem 2.
The schedule generated by Algorithm 1 can complete convergecast in a routing tree network in
Proof.
If
5. Source Aware Scheduling Algorithm with Constrained Channel
The precious communication resources include not only timeslots but also channels. The source aware scheduling algorithm mentioned above gives no consideration to available channels. As shown in Table 1, channel 4 is wasteful to be only scheduled one transmission. The transmission
5.1. Lower Bound with Constrained Channel
The convergecast scheduling algorithm needs to complete the transmissions from each node to the gateway. All these schedules should be completed in the constrained channels for minimum latency or in the given timeslots by minimum channels. The number of schedules

where

Theorem 3.
For
Proof.
The schedules complete convergecast in
Thus,
5.2. Source Aware Scheduling Algorithm with Constrained Channel
The root nodes of subtree should be scheduled first which means that one packet has been converged. One of the root nodes will be scheduled so long as there are one or more packets in their buffers. Policies 2 and 3 of source aware scheduling algorithm choose the set of eligible nodes which can be scheduled in this timeslot. When the number of available channels is not enough to schedule these transmissions, we give the following policies to select nodes scheduled from the set of eligible nodes.
All the nodes have their remaining packets, and the remaining packets of every node in the transmission set can be recorded. The more the remaining packets of a device, the higher the priority, since these nodes have more packets to transmit.
If some nodes have the same amount of remaining packets, we will sort the number of packets left in the subtree. We give higher priority to nodes located in the subtree with more packets left.
If some nodes are the same in Policies 1 and 2, the transmission with higher
If Policies 1, 2, and 3 select more than one node, one of the nodes is optionally scheduled. Repeat these policies with the remaining channels until all channels are used or no node is eligible. If there are some channels left, the rest schedules are included into a rest set. In order to fully use channels the rest schedule will be started if there are still unused channels and no node is eligible. The transmission with higher
Source aware schedule with constrained channel.

6. Source Aware Scheduling Algorithm with Multiple Packets
In some industrial applications, some nodes may have more than one packet to transmit in a superframe. In some cases, the data generated by some nodes is larger than the maximum packet size which IWSNs could transmit. Each device has a designed sample rate to converge its process data and the sample rate may be different. Therefore, multipacket transmissions also exist in a schedule. The central manager knows exactly that the number of packets should be scheduled. The multipacket transmissions are classified into transmission without limited time and transmission with limited time. We modify our convergecast scheduling algorithm to handle these multipacket transmissions.
6.1. Multipacket Scheduling without Limited Time
Consider a routing tree network shown in Figure 5; node

Transmission of multipacket scheduling.
6.2. Multipacket Scheduling with Limited Time
In some scenarios where nodes with designed sample rate should transmit their packet to the central manager before their next packet is generated, the multipacket scheduling should guarantee that these multiple packets are scheduled in time. As shown in Figure 5, multiple packets of node
7. Performance Evaluation
In this section, we evaluate the performance of our convergecast scheduling algorithm through numerical experiments in MATLAB. The performance of source aware scheduling algorithm has been proven, and it is validated in our experiment. Then we evaluate the source aware scheduling algorithm designed for constrained channel.
7.1. Experimental Setup
The performance of the scheduling algorithm for convergecast is affected by different network topologies with different parameters in both depth and size. The network topology is determined by two parameters: N (the number of nodes in the network except for gateway) and D (the maximum depth of routing tree network). In our experiments, N is varied from 35 to 70, and D is varied from 2 to 8. In the real WirelessHART network, most of routing trees are with the depth 4 [6]. For different parameters, we average each data over 1,000 runs. We test the performance of scheduling algorithms by different networks.
7.2. Simulation Results
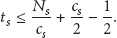
The first simulation tests the schedules generated by source aware scheduling algorithm which has been proven optimal. Figure 6(a) shows the number of scheduled timeslots and N is varied from 35 to 70 with different depth by 1,000 runs. We can see that the bounded scheduling delay and our algorithm can attain the minimum latency. Figure 6(b) shows the number of channels with varied N. The number of channels increases along with the increased N. The explanation of the increase is that more nodes increase the depth and the number of subtrees and then more nodes are eligible to be scheduled. Figure 6(c) shows the number of channels along with increased depth of routing tree in the network with
Performance of source aware scheduling algorithm.
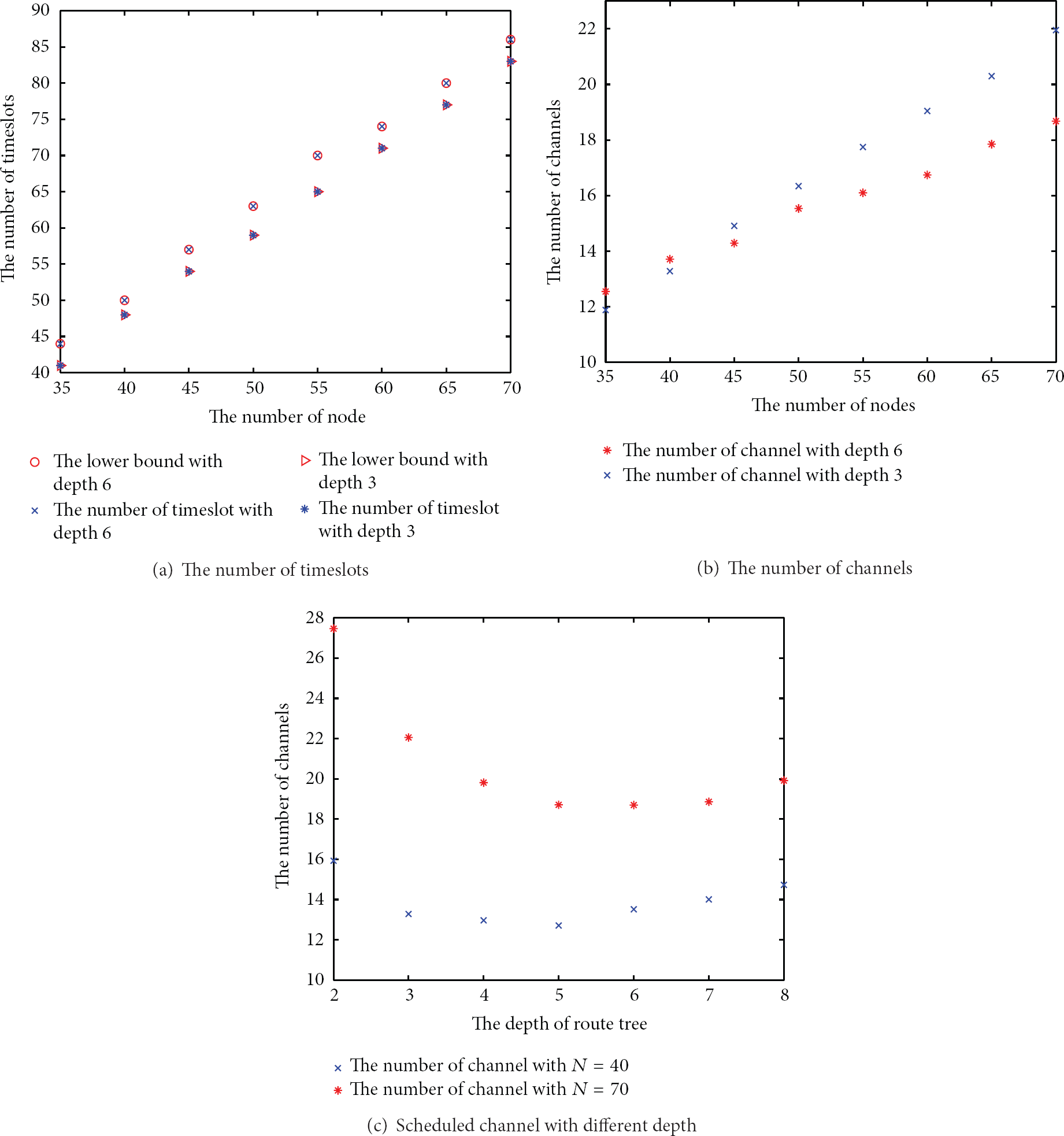
We evaluate the performance of source aware scheduling algorithm with constrained channel by the second simulation. Figure 7(a) shows the number of timeslots with 2 channels and 3 channels. When N is varied from 35 to 70, the schedule with 3 channels is close to the lower bound of timeslots without constrained channels while the schedule with 2 channels needs more timeslots in the network. Thus source aware scheduling algorithm with constrained channel could get a balance between channel resource and transmission delay. Figure 7(b) compares the number of timeslots increasing along with the depth of routing tree where
Performance of source aware scheduling algorithm with constrained channel.
We have computed the lower bound on latency with constrained channel in Section 5. Then we compare the schedules generated by our algorithm with the lower bound. We first compute the lower bound of timeslots

Comparison between scheduling algorithm and lower bound.
8. Conclusion
Convergecast is a critical communication for industrial monitoring and control. This paper studies how to achieve time-optimal scheduling using multiple channels. First, we design an adaptive cross layer scheduling and source aware scheduling algorithm to sustain the derived lower bound on convergecast scheduling. Then a scheduling algorithm is proposed for latency-optimal convergecast with a fixed number of channels. Simulations show that the performance of our algorithm is close to the derived lower bound. And we modify source aware scheduling algorithm to handle convergecast scheduling with multiple packets. Different packets of a device can be delivered before different deadlines.
In our future work, we will discuss the latency convergecast scheduling of aggregated data. We should derive a lower bound on latency and propose an efficient scheduling scheme for aggregated data convergecast. And in some cases, multipath routing is adopted to maximize the probability that the packet is delivered. How to design an optimal scheduling policy is also an important issue for multipath routing. The interference model becomes more complex for the redundant path. At last our algorithms will be applied in real large-scale manufacturing factory and will face more challenges and problems in industrial environments. We should further improve our algorithms to achieve better performance.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by National Natural Science Foundation of China (Grant no. 61201204, no. 61271201, and no. 61100217), the Beijing Higher Education Young Elite Teacher Project (Grant no. YETP0533 and no. YETP0534), and the SRF for ROCS, SEM.