
Abstract
Based on the substructure synthesis and modal reduction technique, a computationally efficient elastodynamic model for a fully flexible 3-R
1. Introduction
The concept of parallel kinematics allows the design of manipulators that combines high stiffness properties with lightweight structures, which leads to potentially superior dynamic behaviors. Based on the principle of parallel kinematics, machining tool with two to six degrees of freedom (DOFs) can be realized through different kinematic designs. This makes PKM tools a promising alternative solution for high-speed machining of extra large scale components with complex geometries.
This proposition has been fully exemplified by the commercial success of Tricept robot [1] and Sprint Z3 head [2] applied in aeronautical industries. Considering the priority of the PKM, the authors presented a newly invented PKM module named the A3 head [3]. It is a novel 3-R
Dynamics model considering the structure flexibility is one of the most overwhelming concerns in the earlier performance prediction and the later utility of such a PKM when it is used for HSM applications. The process-machine interactions are influenced by the dynamic stiffness between the tool center point (TCP) and the workpiece, which determines the maximum depth of cut due to chatter constraints [4]. The dynamic stiffness at the TCP and the maximum stable depth of cut are further influenced by the system's tool—toolholder-spindle configuration and the dynamic behavior of the machine structure, which depends strongly on the position of the moving platform in the workspace for PKM tools [5, 6]. The structural dynamics of the 3-R
Finite element method (FEM) is commonly used for the dynamic modeling of PKMs due to their complex geometries. Investigation based on a “virtual prototyping” technique using FEM model of the machine is an alternative solution [13]. However, structure dynamic analyses for full machine finite element models, which are typically on the order of 1,000,000 DOFs or more, are computationally expensive [14, 15]. Therefore, the analytical or semianalytical dynamic modeling method is needed for rapid evaluation.
In the structural dynamics literature, substructure synthesis techniques have been investigated intensively and applied widely [16]. Substructure synthesis technique, also known as component mode synthesis (CMS) method, can be used to model flexible components using FEM and then to assemble these component models to model the dynamic behavior with a relatively small number of DOFs. A simplified FEM based on the CMS is used to deal with the dynamic modeling problem of 6-R
In the PKM tools field, the stability is closely related to the structure dynamic characteristics [13, 23]. Hong et al. [24] derived a vibration model for a 6-DOF PKM tool, in which the rods of the PKM were considered as spring-damper systems. They performed stability analysis through a combination of the regenerative cutting and the position-dependent dynamics. Pedrammehr et al. [25] studied the dynamic characteristics of a Stewart platform-based machine tool table by taking the damping and stiffness of the rods into account. In this paper, the impact of position and orientation of the moving platform on dynamic behavior as well as forced vibrations of the moving platform by the milling force were studied to present the proper configurations of the moving platform in different machining condition. Henninger and Eberhard [6, 26] proposed a dynamic modeling for a 6-DOF hexapod machine tool named Paralix with substructure synthesis technique. With the proposed model, the stability diagrams for milling processes were investigated and pose-dependent stability diagrams for two example trajectories are presented. Law et al. [7] modeled the position-dependent FRFs of a hybrid serial-parallel kinematic machine tool by synthesizing its substructural reduced order finite element models, and the stability maps were simulated as a function of machine positions.
In the literatures cited above, most of the researchers focused on the dynamic characteristics of the parallel manipulators or the parallel robotics. The investigation on the dynamic response used for the stability analysis of high-speed PKM tools is relatively less. It should also be pointed out that the limbs of the PKM in the dynamic model above were simplified as spatial beam elements or spring system despite their complex geometries. In addition, the joint compliances in most of the models were not taken into account though they would bring significant bearings on the stiffness of the system [27].
This paper presents a dynamic model and then conducts a position-dependent dynamic analysis for a 3-R
2. Kinematic Modeling
2.1. Structural Description
Figure 1 shows a CAD model of the A3 head, which consists of a moving platform, a base, and three identical R

Structure of the 3-R
The three R
The revolute joint is designed as a closed frame. Two opposing short half-shafts project from the frame, rigidly fixed to the inner rings of bearings that have outer rings mounted within block units attached to the base by bolts and pins. Internally, each side of the closed frame carries two sliding blocks of a ball guideway; the slideways are mounted on each side of the limb body. The closed frame also carries the nut of the lead-screw assembly.
The limb body carries a servomotor and lead-screw thrust bearing at the rear and a spherical bearing at the tip. The limb body is a hollow rectangular structure having inner stiffeners, dished on one side to accommodate the lead-screw. Its cross-section dimensions are set to keep overall sizes and weight as low as practicable while providing adequate rigidity.
The spherical joint is designed as a combination of three revolute joints with their axes being orthogonal to one another, connecting the moving platform to the limbs for force transmission.
2.2. Coordinate Systems
Figure 2 shows the schematic diagram of the A3 head, where A
i
(i = 1, 2, 3) is the center of the spherical joint of the ith limb; B
i
(i = 1, 2, 3) is the center of the revolute joint; C
i
(i = 1, 2, 3) is the center of the servomotor. The moving platform ΔA1A2A3 and the base ΔB1B2B3 are set to be equilateral triangles with A and B being the center point, respectively. A reference coordinate system B − x
B
y
B
z
B
is attached to point B, with the axes direction shown in Figure 2; a body fixed coordinate system A − uvw is placed at point A, paralleling to the coordinate system B − x
B
y
B
z
B
at its initial position; A
t
is the tool tip point, with

Schematic diagram of the 3-R
The transformation matrix of the frame A − uvw with respect to the frame B − x B y B z B can be formulated as

where s = sin, c = cos, and ψ, θ, and ϕ are three Euler angles of precession, nutation, and body rotation, respectively.
The orientation matrix of the limb frame B i − x i y i z i with respect to frame B − x B y B z B is

where ϕ1 = 0, ϕ2 = 2π/3, and ϕ3 = 4π/3.
The position vector

where

Taking ψ, θ and a as independent coordinates, and considering the constraints of revolute joint, we obtain the

Equation (5) gives the parasitic motions of the 3-R
The vector


where θ i is the revolute angle of the ith limb.
The node N ij of the ith limb measured in the frame B i − x i y i z i is

The position vector

The detailed derivation process of the 3-R
3. Dynamic Modeling of the Substructures of the 3-RPS
With the substructure synthesis technique and the previous kinematic analysis, the 3-R
The base and the moving platform are treated as rigid bodies.
Based on the modal reduction techniques, the limbs’ bodies are modelled by importing CAD model into the finite element software for preprocessing and are then reduced into spatial beam structures.
The compliances of revolute and spherical joints are simplified as lumped virtual springs with equivalent stiffness.
The coupling effect between rigid and elastic motions is negligible as the mechanism works at low or moderate speed.
A structural damping is considered in the position-dependence FRF analysis.
Clearances in joint are all neglected.
3.1. Substructure Modal Reduction
Figure 3 shows the assembly of a R
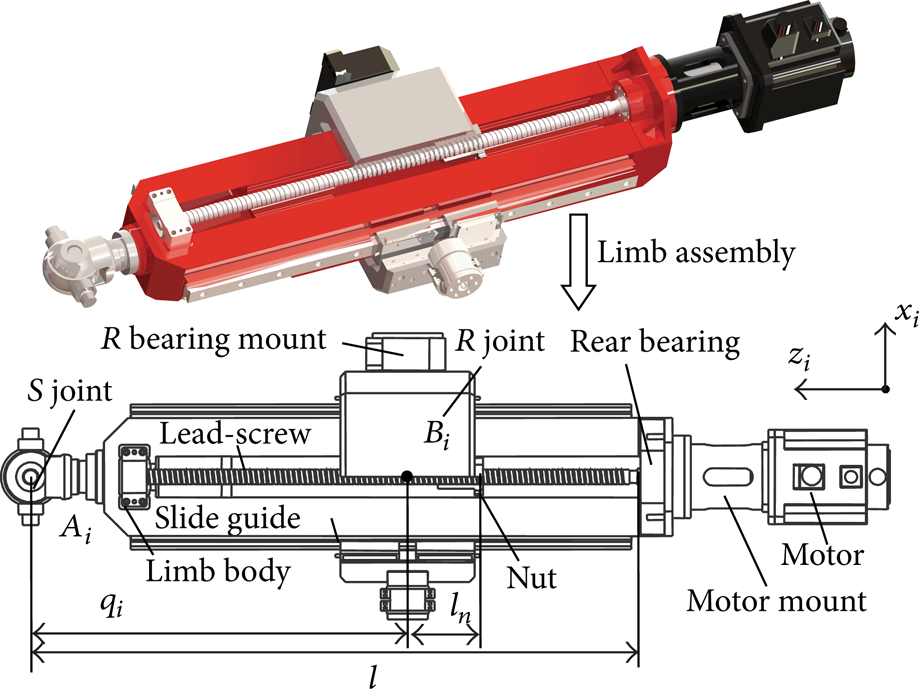
Assembly of a R
Considering both computational efficiency and accuracy, the modal reduction technique is used to complete the limb elastodynamic modeling. Figure 4 is the limb substructure modal reduction diagram. An FE model for limb substructure was generated from its detailed CAD model using solid elements by the ANSYS software. The structural component was assigned material properties as modulus of elasticity of 206 GP, density of 7850 kg/m3, and Poisson's ratio of 0.25. After necessary convergence tests of the FE model, the substructural system matrices were exported to the MATLAB environment. The following subsequent modal reduction and substructure synthesis were conducted within the MATLAB environment.
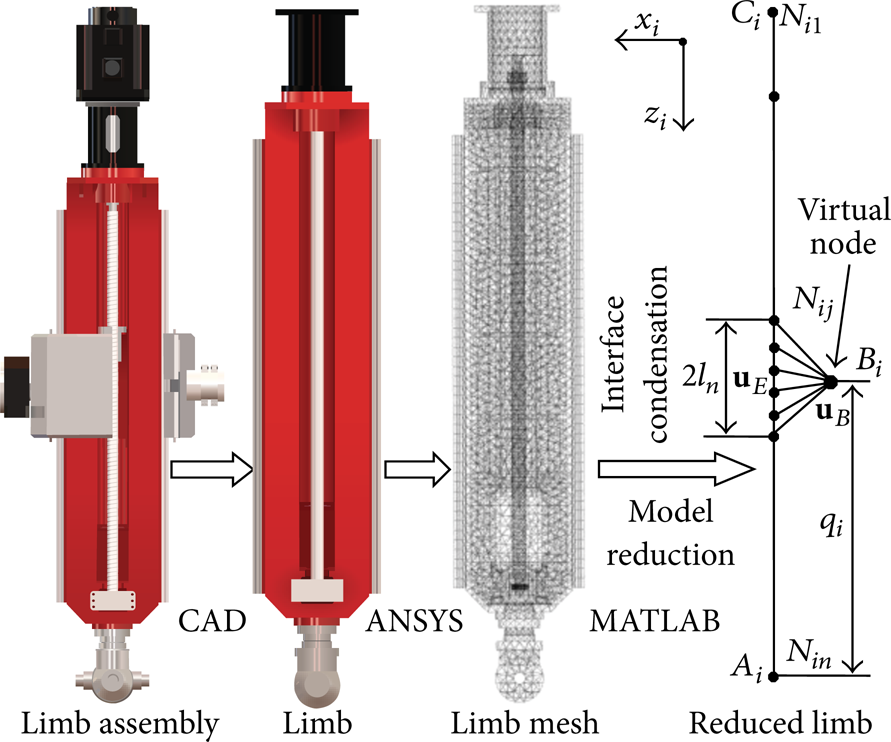
Limb substructural model reduction.
In Figure 4, A
i
and C
i
are the endpoints of the limb and represent the center point of the spherical joint and servomotor, respectively. B
i
is the virtual condensation node, which is used to connect the interface nodes within the closed frame by interpolation multipoint constraints (MPC) formulation [28].
The dynamical equations of the limb from the FE model can be expressed as follows:

where

where Λ and

According to the conservation law of kinetic energy and potential energy, the reduced mass and stiffness matrices can be obtained as follows:

where
As the limb length q
i
is changing with the position and posture of the A3 head, a different set of nodes of limb comes into contact with the revolute joint. The substructures will be incompatible for the further assembling of substructure models [7, 14]. As shown in Figure 4, to make the incompatible substructure synthesis possible, a virtual condensation node B
i
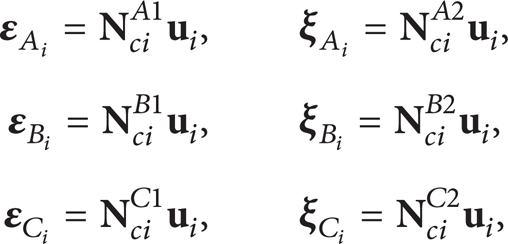
representing only a subset of interface nodes within the closed frame is defined; all interface nodal DOFs

where
The interpolation MPC formulation defines displacements and rotations of the condensation node as the weighted average of the motion of the interface nodes in contact. The motions of the condensation node DOFs

where

where

3.2. Dynamic Model of the RPS Limb
During the elastodynamic modeling process for the R

Force diagram of limb.
Herewith, k sxi , k syi , and k szi are the stiffness coefficients of three virtual transverse linear springs of the spherical joint, and c sxi , c syi , and c szi are the damping coefficients; kr1xi, kr1yi, kr1zi, kr2xi, kr2yi, and kr2zi are stiffness coefficients of the transverse and torsional springs of the revolute joints, and cr1xi, cr1yi, cr1zi, cr2xi, cr2yi, and cr2zi are the damping coefficients accordingly.
Based on (11) and (14), a set of dynamical equations of ith limb in the limb frame B i − x i y i z i is formulated with adequate boundary conditions. For convenience, the subscript except the limb number i (1, 2, 3) is neglected:

where

Make the DOFs
where

where
Thus, the coordinate transformation can be made to express (19) in the global reference coordinate system as

where
Considering the impact of mass matrices of spherical joint, revolute joint, and servomotor on the system, the mass matrix of the limb assembly can be expressed as

where
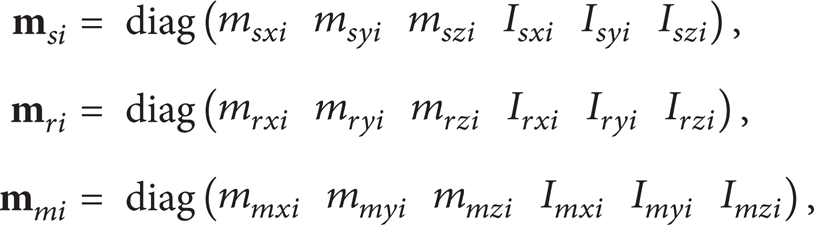
where m sxi , m syi , m szi , I sxi , I syi , and I szi are mass and inertial elements of the spherical joint; m rxi , m ryi , m rzi , I rxi , I ryi , and I rzi are mass and inertial elements of the revolute joint; m mxi , m myi , m mzi , I mxi , I myi , and I mzi are mass and inertial elements of the servomotor.
The formulation of (23) can also be expressed as

where
3.3. Dynamic Model of Moving Platform
As shown in Figure 6, the equations of motion of the moving platform can be formulated by using the free body diagram as follows:

where

where

Force diagram of moving platform.
4. Substructure Synthesis
In this section, the governing dynamical equations of the system are established with the substructure synthesis combining with the compatibility conditions at interface of the substructures. The joint stiffness is deduced based on stiffness equivalence criterion and then used for the deformation compatibility analysis.
4.1. Joint Stiffness
The stiffness of the joint may produce important influence on the system dynamical compliance [29]. To improve the simulation precision of the dynamical characteristics of the PKM, the joint stiffness must be considered delicately in the modeling processing.
4.1.1. Stiffness Modeling of the Revolute Joint Assemblage
The revolute joint connects the limb substructures to the base substructure, which is mainly comprised of the rear bearing of the lead-screw, lead-screw nut, closed frame, ball guideway subassembly, and revolute bearing. As shown in Figures 3 and 5, the revolute joint can be simplified as lumped springs, of which the stiffness coefficient can be deduced by the stiffness matrices of revolute bearing subassembly

The limb is held by four slide blocks of the ball guideway subassembly, which are carried by the closed frame internally. The ball guideway subassembly can be treated as six virtual lumped springs, one of which is zero along the axial direction of limb. The other stiffness coefficients can be evaluated based on the stiffness equivalence criterion and the slide block distribution mode. We have

The lead-screw subassembly is comprised of the nut, the lead-screw, and the rear support bearing which are serially connected. The stiffness matrix of the lead-screw subassembly can be expressed as
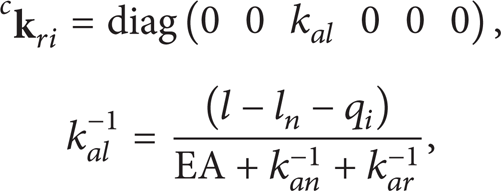
where EA is the tensile modulus of the lead-screw, A = πdlead2/4, dlead is the lead-screw diameter, and k an and k ar are the stiffness coefficients of the nut and rear support bearing, respectively. After serial and parallel connecting of the subassemblies, the stiffness matrix of the revolute joint can be obtained as

Substituting (29)∼(31) into (32), we have

where

4.1.2. Stiffness Modeling of Spherical Joint Assemblage
The spherical joint is used to connect the limb substructures with the moving platform substructure and can be trod as a virtual lumped spring with three orthogonal transverse DOFs. The stiffness matrix of spherical joint can be expressed as

Note that the spherical joint is a combination of three revolute joints with their axes being orthogonal to one another and the stiffness coefficient
4.2. Deformation Compatibility Conditions
As mentioned above, the connection of moving platform with the ith R

Connection of the spherical joint.
The displacements of the moving platform

where r Axi , r Ayi , and r Azi are the coordinates of A i measured in the frame B − x B y B z B .
The reaction forces at the interface between the moving platform and the RPS limb can be expressed as

where

Substituting (21) into (38), we have

Transforming the DOFs

Figure 8 is the diagram of connecting the revolute joint with the base,


Connection of the revolute joint.
The stiffness matrix of connecting the limb with the base is

As the base is fixed, the displacements of the base are zero,
According to the displacement compatibility and the force equilibrium condition, the reaction forces and moments at the interfaces between ith limb and the base can be expressed as

where
4.3. Dynamic Model of 3-RPS in Global System
Substituting (40) and (43) into (26) and (27), we can obtain the governing equations of motion of the system:

where
Let

Herein

5. Dynamic Characteristics Prediction and Validation
In this section, dynamic characteristics analysis of a prototype of the A3 head shown in Figure 1 is carried out to illustrate the effectiveness of the above-proposed method. The geometrical parameters of the A3 head are listed in Table 1. Herein, p z = s + d is the distance between center point of moving platform and center point of base, s = 0∼200 is the stroke along the axes z, and θmax is the maximal posture angle. The position when s = 0 is defined as the initial position of the A3 head.
The geometrical parameters of the A3 head (unit: mm).

5.1. Natural Frequency of the 3-RPS
In this section, the eigenvalue and eigenvector evaluation is conducted to predict the distributions of lower natural frequencies of the A3 head throughout the entire workspace. Neglecting the influence of the damping, the equation of the free vibration of the system can be obtained from (45) as

The characteristic equation of (47) is
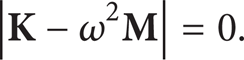
By solving (48), we can get the kth (k = 1, 2,…, n) eigenvalue ω
k
2 and eigenvector
Figure 9 shows the distributions of lower natural frequencies of A3 head over the working plane of P
z
= 550 mm. It can be found that the first six orders of natural frequencies of the A3 head are axisymmetric over the given work plane. This is coincident with the axial symmetry of the structure of three R

Natural frequencies’ distributions over the working plane at p z = 550 mm.
5.2. Natural Frequency and Mode Shapes Validation of the 3-RPS
In this subsection, the natural frequencies, modal shapes, and dynamic responses at the end of the moving platform are measured to validate the correctness of proposed dynamical modeling method. Figure 10 is the experimental test rig to measure the dynamical characteristics of the A3 head at the position of P z = 550 mm and the orientation of θ x = θ y = 0°. The testing rig includes a data acquisition system and an LMS modal testing system in which modal analysis and FRF curve fitting were carried out. The LMS front is SC-305 with 8 input/output channels. Accelerometers are piezoelectricity accelerating sensor produced by B&K Company and used to pick up the responses. The impact hammer is PCB086C03 with the force sensor installed internally and the sensitivity is 11.9 mV/N. Sampling frequency is set as 1024 Hz and the sampling time is set as 2 s. Frequency resolution is set as 0.5 Hz. The window function is force exponential with 50% force window and 10% exponential window. Each measuring run is the averaged result of five impacts. During the process of modal test, the excitation point is fixed at the end of the moving platform while the pickup points of dynamical response are changing correspondingly [30]. The FRFs from exciting points to recording points can be calculated, and homologous elements of transfer function in arbitrary row or column can be obtained. Then, with the technique of modal identification and fitness, the natural frequencies, modal shapes, damping ratios, and the FRFs of the system can be obtained. The detailed experimental method of the A3 head was addressed in our previous work in [31].
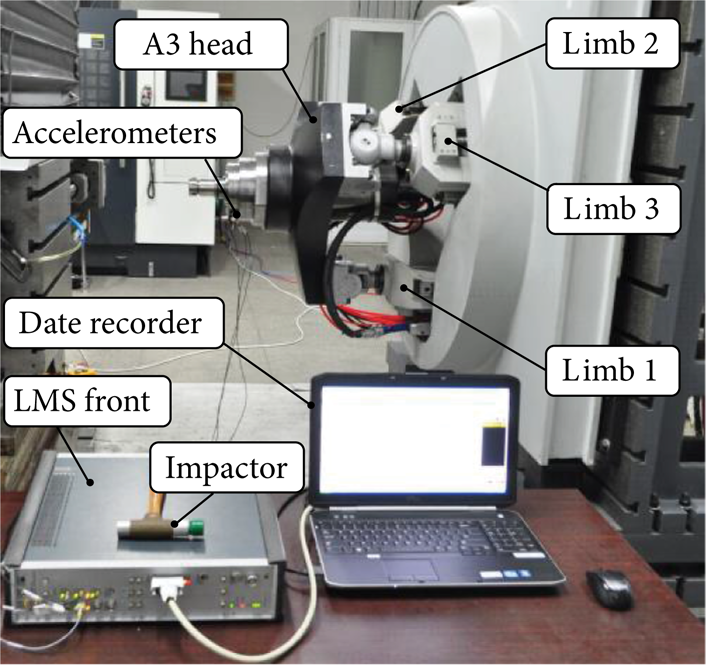
Experimental setup to measure the dynamical characteristics.
Figure 11 is the wire-frame diagram comparison of the first five orders of modal shapes between analytical and experimental models. The corresponding natural frequency values as well as the prediction errors of analytic and experiment at the initial position are listed in Table 2. It can be found that the errors of the first three orders of natural frequencies are small, and the maximum was less than 5%. The errors of fourth and fifth orders of natural frequencies are relatively larger, and the maximum was up to 13.5%.
The natural frequencies of the 3-R
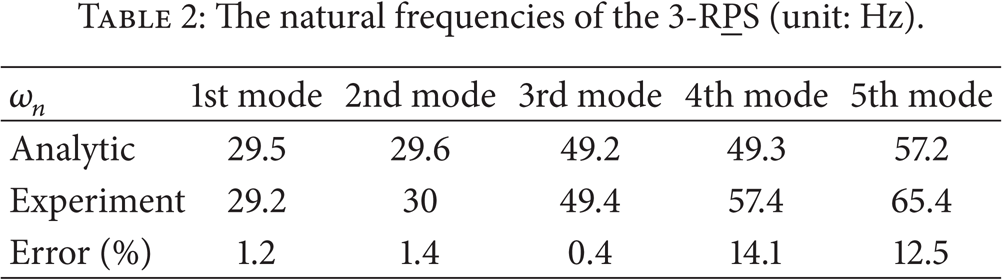

Comparison of natural frequencies and mode shapes between the analytic and experimental methods.
It can be found from Figure 11 that the first order of modal shape is reciprocating vibration of the whole system along y-axes, in which all limbs oscillate up and down; the second order of modal shape is reciprocating vibration of the whole system along x-axes, in which all limbs swing horizontally; the third order of modal shape is external and internal reciprocating vibration of the limbs, bending about the y i -axes with respect to the limb reference frame B i − x i y i z i , with limb1 stretching forward and back along its axis besides its bending. It should also be pointed out that the first two orders of modal shapes obtained by the proposed method coincide well with the experimental ones. The predicted vibrations of limb2 and limb3 in third order of modal shape are in agreement with the experimental ones. And the predicted vibration mode of limb 1 is agreed upon to test results only with an opposite vibration phase.
Figures 11(g) to 11(j) show that the fourth-order modal shape is the vibrations of limb 2 and limb 3 about y i -axes with respect to the limb frame B i − x i y i z i in the opposite way, and the fifth-order modal shape is the vibrations of limb 1 to limb 3 about y i -axes in the same way. The vibrations of limb 2 and limb 3 in the fourth and fifth orders of modal shapes in the analytical model coincide with the experimental ones. However, the predicting accuracy of limb 1 is relatively less. It can be found in Figures 11(g) and 11(h) that the experimental vibration of limb 1 which vibrates about both x i and y i is more complex than the analytical one. The vibration of the limb 1 in the fifth order of modal shape only vibrates about y i -axes; however, the corresponding one also combined with the vibration about x i .
It can be found from the comparison of the analytical and experimental values that the differences between theoretical calculation and experimental testing results of the fourth and fifth orders are a little bit more than those of lower orders. The main reason for this phenomenon is that the spherical and revolute joints in the theoretical model are treated as ideal ones with the same pretightening force and stiffness coefficients. However, the preloads and assembling errors of the joints in the actual prototype are different because of the manufacturing errors, leading to the differences of the stiffness coefficients of the spherical and revolute joints in each limb assembly. The stiffness errors of the joints result in the prediction errors of the whole system in the further dynamical characteristic analysis. The comparisons of the simulated and experimental modal shapes indicate that the preloads of spherical and revolute joints of limb 1 assembly should be improved. It can be seen from the modal shape diagrams that the vibration magnitude of the bodies is relatively slight compared with the vibration magnitudes of the joints. Therefore, great effort should be made to ensure the joint rigidities.
5.3. Frequency Response Analysis of the 3-RPS
In this subsection, the position-dependent dynamic response of the A3 head is analyzed using the dynamical modeling method proposed in this paper. The system mass and stiffness matrices in (44) can be transferred to the end of the moving platform as follows:
where

where the superscript “

where
Experiment shows that the A3 head prototype is a complex modal system. To simplify the damping problem in modeling [21], we assume that the system has structural damping (resulting from the joint friction) proportional to the system stiffness matrix and (44) becomes

where η is the damping factor. Thus, the displacement FRFs for the system can be written as

where Φ is the system eigenvector matrix, which can be proved for proportional damping system to be the same as in the undamping system. m
i
=
Figure 12 displays the comparison of the original real and imaginary parts of FRFs between the simulation and the experiment along the u direction with respect to the frame A − uvw at the initial position. In the figure, black solid curves stand for the FRFs obtained by the experimental method and the red dashed curves are calculated by the theoretical method proposed. Apparently, there exists a good agreement at resonant peaks of interest. It can be found that the natural frequency of the highest peak of the tested FRF is about 29 Hz, and a lower peak happens in the frequency value about 70 Hz. The imaginary parts of FRFs play a main role in the dynamical response of the system, of which the maximal magnitude is 1.2 × 10−6 m/N, while the corresponding real parts of FRFs are 7 × 10−7 m/N.

FRF comparisons between measured and analytic methods.
The mode with maximal peak of the FRF is defined as major modal, which influences the dynamic behavior of the system dramatically. The simulation shows that the first two order modes are two dense natural frequencies, no matter at what configuration the A3 head is set, and two repeated natural frequencies when the structure is completely symmetric. It has also been approved by the natural frequencies distributions in Figure 9. These characteristics of the PKMs can also be found in [20, 21].
Figure 12 displays the comparison of FRF curves along u-axes obtained by the measured method, analytic and FE model at the position of P z = 750 mm, and the orientation of θ x = θ y = 0°. The real and imaginary FRFs in Figure 12 show that the simulation precision of the low order resonant peaks of FRFs using the analytical method is higher than the corresponding ones of the high order modes, which have been fully approved in the previous natural frequencies and modal shapes analysis. It can be also found that there is a small peak in the analytical FRFs and the corresponding natural frequency is about 60 Hz, while the corresponding natural frequency in the measured FRFs is about 70 Hz. Thus, the natural frequencies of the high order modes obtained by the proposed method are smaller than the corresponding one measured. The full order flexible FE model of the A3 head is also established using the same joint stiffness coefficients to simulation of the dynamical response, and the blue dash-dotted curves shown in Figure 12 are simulated in ANSYS environment. It is obviously shown that the FRF curves obtained by the FE model coincide well with the measured FRF curves at the small resonant peak of the high order mode. However, the simulation precision of FE model at the resonant peak of the major modal is less than the analytical method. The corresponding natural frequencies of the major modal are higher than the measured ones.
Figure 13 shows the comparison of the analytical and measured distributions of the amplitude FRFs varying with the configurations of A3 head. The diagrams on the left are obtained by the analytical method, and the right ones are measured by the LMS system. It can be found in these figures that the original FRFs at the end of moving platform are strongly position-dependent, and the maximal dynamical compliance arises when the PKM is complete trisymmetrical. Figures 13(a) and 13(c) display the distributions of calculated FRFs in the direction of u-axes and v-axes of the body fixed frame A − uvw, respectively, when the orientation angle θ y varies from − 30° to 30° about y-axes at the position of P z = 750 mm and the orientation of θ x = 0°. It can be seen that the dynamic compliance distributions are symmetric, and the maximum value appears at θ x = θ y = 0°. With the increasing of absolute value of orientation angle θ y , dynamic compliances of the major modal along u-axes and v-axes both decrease, and the values of magnitude along u-axes decrease obviously. It should also be indicated that the major modals at the initial orientation are repeated natural frequencies of the first two order modes and separate into two dense natural frequencies when the absolute value of θ y increases. This phenomenon can also be found in the distributions of the natural frequencies.

The FRFs distributions at P z = 750 mm, θ x = 0°, and θ y = − 30°∼30°.
Figures 14(a) and 14(c) show the distributions of calculated FRFs along u-axes and v-axes of the frame A − uvw, respectively, when the orientation angle θ y = 0° and θ x varies from − 30° to 30° about x-axes over the work plane P z = 750 mm. It can be seen from Figure 14(a) that the natural frequencies of the major modal along u-axes increase when θ x varies from − 30° to 30°, while the variations of the magnitude values are slight. Figure 14(c) shows that the maximum value of dynamic compliance along v-axis appears at the orientation of θ x = − 5° and θ y = 0°, and the dynamic compliances of the major modal decrease, no matter with the increase or decrease of θ x . The distributions of measured FRFs in Figures 14(b) and 14(d) express the same variation tendencies as shown by the calculated ones using analytical method proposed.

The FRFs distributions at P z = 750 mm, θ y = 0°, and θ x = − 30°∼30°.
It can be seen from the distributions of FRFs in Figures 13 and 14 that the magnitude of the dynamic compliance decreases if the orientation angular θ increases, and the corresponding dynamic stiffness will increase accordingly, which is helpful to improve the chatter stability of the A3 head based high-speed machining [32].
6. Conclusions
This paper presents a computationally efficient elastodynamic model for a fully flexible 3-R
Based on the substructure synthesis and modal reduction technique, a semianalytical dynamic model is established. With the proposed model, the distributions of the natural frequencies and FRFs throughout the entire workspace can be predicted in a quick manner.
The distributions of the natural frequencies and FRFs of the A3 head indicate that the dynamic characteristics of the system are strongly position-dependent and axially symmetric due to its kinematic and structural features.
The simulation accuracies of lower orders of the natural frequencies are higher than those of higher orders ones, relatively. The maximal predicting errors are less than 15% at the initial position.
It can be seen from the first five modal shapes that the vibration magnitudes of the joints are higher than the other bodies, indicating that great effort should be made to ensure the joint rigidities.
The highest resonant peaks of the dynamic compliance appear at the natural frequencies of the first two orders of modes, and the maximal dynamic compliance arises when the PKM is completely trisymmetrical.
The major modes at the initial orientation are repeated natural frequencies of the first two order modes and separate into two dense natural frequencies when the orientation angle increases.
The good agreement between the simulation and the experiment of the dynamic characteristics indicates the effectiveness of the modeling method. With the rapid evaluation for the dynamic responses, a further detailed investigation associated with high-speed machining stability will be carried out and reported in separate articles.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This research has been jointly supported by the National High Technology Research and Development Program of China (863 Program 2012AA040702), National Natural Science Foundation of China (NSFC, Project no. 51375013), the Ph.D. Programs Foundation of Ministry of Education of China (20110032130006), Natural Science Foundation of Anhui Province (1208085ME64ME), and Open Research Fund of Key Laboratory of High Performance Complex Manufacturing, Central South University (Grant no. Kfkt2013-12).