
Abstract
The problem of consensus-based distributed tracking in wireless sensor networks (WSNs) with switching network topologies and outlier-corrupted sensor observations is considered. First, to attack the outlier-corrupted measurements, a robust Kalman filtering (RKF) scheme with weighted matrices on innovation sequences is introduced. The proposed RKF possesses high robustness against outliers while having similar computational burden as traditional Kalman filter. Then, each node estimates the network-wide agreement on target state using only communications between one-hop neighbors. In order to improve the convergent speed of the consensus filter in case of switching topologies, an adaptive weight update strategy is proposed. Note that the proposed algorithm relaxes the requirement of Gaussian noise statistics in contrast to the decentralized/distributed Kalman filters. Besides, unlike the existing consensus-based filters, we do not need to perform consensus filtering on the covariance matrices, which will reduce the computational and communicational burden abundantly. Finally, simulation examples are included to demonstrate the robustness of the proposed RKF and effectiveness of adaptive consensus approach.
1. Introduction
Wireless sensor networks (WSNs) have emerged as an ideal means for data gathering and target tracking in a variety of home [1, 2], industrial [3], transportation [4], and security [5] applications. Although target tracking system through a WSN can have several advantages, it is a challenging task since each sensor node typically has very limited power supply and communication bandwidth [6, 7]. Reducing the energy cost in communication and computation can significantly increase the node life span [8, 9]. This makes distributed estimation and fusion very popular in target tracking system by WSNs. Generally speaking, research in distributed estimation and fusion in WSNs can be categorized into two classes of networks: (a) fusion center- (FC-) based WSNs and (b) ad hoc WSNs. FC-based WSNs can perform distributed estimation but have limitations arising due to (i) the high transmission power required at each sensor to transmit its local information to the FC that is proportional to the covered geographic area and (ii) lack of robustness in case of FC failures. For example, the well-known FC-based strategy is decentralized Kalman filtering, which involves state estimation using a set of local Kalman filters that communicate with all other nodes [10, 11]. The information flow in the traditional decentralized Kalman filtering is all-to-all with communication complexity of
The average consensus has been proven to be an effective tool for performing network-wide distributed computation task ranging from flocking to robot rendezvous [15, 16]. During the last decade, average consensus-based target tracking in WSNs has obtained extensive researching interest [17–21]. For example, Olfati-Saber introduces a distributed Kalman filtering (DKF) algorithm that uses dynamic consensus strategy [17, 18]. The DKF algorithm consists of a network of micro-Kalman filters each embedded with a high-gain high-pass consensus filter. The role of consensus filters is fusion of sensor and covariance data obtained at each node. Later on, the problem of estimating a simpler scenario with a scalar state of a dynamical system from distributed noisy measurements based on consensus strategies is considered in [19]; the focuses are on the interaction between the consensus matrix, the number of messages exchanged per sampling time, and the Kalman gain for scalar systems. In [20], the authors consider the distributed estimation problem for a continuous-time moving target under switching interconnection topologies. Using state-consensus strategy, a recursive distributed estimation algorithm is proposed. There are also some results on consensus-based target tracking for nonlinear dynamic (see, e.g., [14, 21] and the references therein). However, the distributed estimation and fusion problem through consensus strategy so far is mainly focused on Gaussian noises scenario in a static sensor network.
It is a challenging task when measurements generated by a sensor node are corrupted by outliers (e.g., [22]). Unfortunately, the problem of outliers is of practical importance in a target tracking system using radar or infrared sensor [23, 24], communication applications where non-Gaussian (heavy-tailed) noise occurs, such as in underwater acoustics, satellite communications through the ionosphere [25], and others. More importantly, a node in the WSN may break in practical applications due to the strict energy constraint. This may make the observations from this node become outliers. In this case, the aforementioned consensus-based tracking approaches will degrade the fusion performance greatly. Therefore it is of practical interest to consider distributed estimation and fusion when outlier is presented, especially in case of switching topologies.
In this paper, we focus on consensus-based distributed tracking in a switching WSN when sensor observations are corrupted by outliers. First, to attack the outlier-corrupted measurements, a robust Kalman filtering (RKF) scheme with weighted matrices on innovation sequences is introduced. It has been proven that the proposed RKF possesses high robustness against outliers while having similar computational burden as traditional Kalman filter. Then, each node estimates the network-wide agreement on target state using only communications between one-hop neighbors. In order to improve the convergent speed of consensus approach in case of switching topologies, an adaptive weight update strategy is proposed. It should be noted that the proposed algorithm relaxes the requirement of Gaussian noise statistics compared with the decentralized/distributed Kalman filters (see, e.g., [11, 18, 26]). Besides, unlike the existing consensus-based filters, we do not need to perform consensus filter on the covariance matrices, which will reduce the computational and communicational burden abundantly. Simulation examples are included to demonstrate the robustness of the proposed RKF and effectiveness of adaptive consensus approach.
The rest of the paper is organized as follows. In Section 2, the problem of consensus tracking in a switching sensor network with outlier-corrupted measurements will be formulated. In Section 3, the outlier-resilient robust filter will be given according to M -estimation. The proposed robust filter is further distributed by adaptive consensus strategy in Section 4. In Section 5, we give several simulation examples, which are followed by concluding remarks in Section 6.
2. Problem Statement
Consider the target tracking problem in a network of N sensors distributed randomly deployed on a field, each with measurements corrupted by outliers. As is well known the sensor network can be modeled by using algebraic graph theory [27]. A vertex of the graph corresponds to a node and edges of the graph capture the dependence of interconnections. Formally, a graph
For the distributed estimation fusion problem, each node in the WSN is deployed to estimate the state of a dynamic target based on noise-corrupted measurements. We consider the discrete linear stochastic system


Assumption 1.

Remark 2.
The practical challenge which is of our interest also lies in the outlier measurement which means mismatch in measurement noise model. The modeling error in measurement noise model is related to the sensor failure, spikes, or jamming which is not Gaussian. In order to simulate this unmodeled measurement uncertainty, a non-Gaussian error term

Assumption 3.
The initial state

The problem of interest is to design a robust filter capable of performing state estimation and target tracking tasks with less communication and computational load. The robustness lies in two aspects: (i) the algorithm is robust in the sense that heavy-tailed errors or outliers do not affect the solution; (ii) the entire network works regardless of switching topologies as long as the network is still connected. To ease the analysis, we also assume that all sensors are synchronized and have the same measurement rate.
Lemma 4.
Under Assumptions 1 and 3, for ith sensor subsystem of the system (1)-(2) without outlier (i.e.,







3. Outlier-Resilient Robust Kalman Filtering
The conventional Kalman filter can be formulated as a solution to a particular weighted least squares problem [29]. Unfortunately, it is not robust because extreme outliers with arbitrarily large residuals can have an infinitely large influence on the resulting estimate. From (6) to (12), we can see that, in

Equating the first partial derivatives with respect to the state to be estimated

The score function
Now, (14) can be rewritten as

Letting

In the light of the above comparison and analysis of conventional Kalman filtering and M -estimator, the proposed RKF is given in Theorem 5 as follows.
Theorem 5.
Under Assumptions 1 and 3, the ith sensor subsystem of the system (1)-(2), one has the RKF


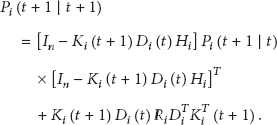
Other recursive steps are just the same as (7), (8), (10), and (12) in Lemma 4.
Proof.
The formula (17) can be derived from above directly, and the covariance of weighted innovation is

Substituting (17) into the filtering error equation


Remark 6.
It can be seen that
Remark 7.
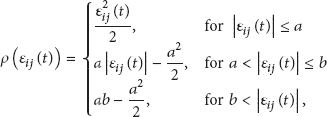
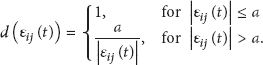
Based on (23), the weighted matrix of innovations can be formulated as

The three different intervals of
Remark 8.
Several other robust cost functions can be used in the robust statistics setting, such as Huber's robust cost function, Andrews’ method, Vapnik's loss function, or the biweight approach. Take Huber's robust score function as an example:

4. Adaptive Consensus for Distributed Estimation Fusion
We now consider how to extend the aforementioned RKF to be applicable in distributed state estimation with only one-hop communications based on average consensus. For distributed robust Kalman filtering based on consensus, each node maintains a local filter according to the recursions in Theorem 5. However, in order to reach a network-wide agreement on target state estimate, we use an adaptive consensus on the local estimate in each time slot.
Assume the state of each node at the kth iteration is denoted by

Remark 9.
The iteration (27) means that each node iteratively updates its state estimate based on a linear combination of its own and neighbor's state estimates. The iterative estimate update process (27) will compel the state estimate of each node to asymptotically reach a consensus value, provided that the weights
In a practical application, it is hoped that the consensus algorithm converge to the steady state as fast as possible, especially for a switching network. To this end, we propose an adaptive weight modification approach to enhance the convergence speed of the consensus (27). Noticing that the weights satisfy


Note that it is an approximation of the actual desire signal which is the average of all node's data. This is the best available estimate of the ultimate average since only neighbor's data is available for each node. In the adaptive consensus scheme, the objective is to minimize the difference between the node estimate and desired signal. Therefore, we define a cost function as



Remark 10.
Note that we only perform consensus filtering on the state estimate in this paper, instead of simultaneous consensus on both information estimate and covariance as in [18, 21, 26] and the references therein. This is motivated by observation that enlarging the covariance matrices to an appropriate size can also guarantee the convergence of the filter [34, 35]. With the consensus iteration, the fused estimate converges to a network-wide agreement. This means the corresponding covariance matrices should be smaller than the one each node keeps. On the contrary, we do not perform consensus on the covariance matrices, which takes the effect of making the covariance matrices enlarged in another perspective. This makes the whole filtering expected to converge. The simulation results in Section 5 will demonstrate this expectation. However, our approach only needs communication burden of
5. Simulation Examples
The proposed consensus tracking approach is applied to tracking a target moving on noisy circular trajectories. Consider N sensors randomly deployed in the region of interest, which is 50 m × 50 m with the coordinates from (−25, −25) to (25, 25). Consider a target with dynamics [18, 21]



Two scenarios are considered to verify the robustness of the proposed RKF and the effectiveness of the adaptive consensus, respectively.
Scenario 1 (one sensor case—robustness of the proposed RKF). To verify the robustness of proposed RKF under condition of outlier-corrupted measuring noises, we first consider just a single sensor which is used to track the target. The sensor makes noisy measurements of the target according to (2) with
The average RMSEs with different parameters over time steps after 500 Monte Carlo runs are shown in Table 1. From Table 1, we can see, in case of no outlier presented, the proposed RKF performs a little poorer than traditional Kalman filter (TKF). This is because RKF has deweighted the elements of matrix D in case of larger innovations. However, when outliers present, the adaptive weight of matrix D according to different innovations makes the proposed RKF more robust than TKF. For example, in case of
Average of RMSE (/10−1 m) performance over time steps for single-sensor scenario.

Besides, we added some point outliers with

RMSE versus time steps for RKF and TKF when point outliers are presented.
Scenario 2 (multiple sensors case—effectiveness of the adaptive consensus). Suppose there are

A sensor network with 50 nodes and 240 links, where “o” stands for the location of a sensor, a solid line for a communication link, and the large dotted circle for the real track of the target.
The nodes make noisy measurements of the position of the target either along the x-axis or along the y-axis; that is, in the observing model (2),
Average RMSEs over sensors in the Gaussian noises case are shown in Figure 3. It is noted that the proposed ConsenRKF yields almost identical performance compared to the ConsenTKF. Both approaches based on adaptive consensus perform very close to the CentrTKF, which is the minimum mean squared error estimator in the case of Gaussian white noise. However, the TKFwoConsen ranks the worst among the 4 approaches, which show that the consensus algorithm makes the estimates of each sensor achieve an agreement over the whole network.

Comparison of RMSE without outliers present.
The average RMSEs over sensors in the outlier-corrupted noises case are shown in Figure 4. A quick look at Figure 4 reveals that the CentrRKF performs the best among the 4 approaches. However, it is worth noting that, for the centralized fusion approach such as CentrTKF and CentrRKF, a fusion center (FC) is needed. This makes it not robust against FC failure and imposes rather a high computational burden on the FC. More importantly, the communicational cost for the centralized fusion approaches is

Comparison of RMSE in case of outlier-corrupted measurements.
Finally, in a peer-to-peer estimation architecture every node is supposed to know the estimate of the target state. Therefore, estimation error by itself is no longer the only measure of performance in consensus-based estimation in ad hoc sensor networks. The agreement of estimate of every node permits the query on any node in the network about the estimation. In Figure 5, the consecutive snapshots of estimates of all nodes are shown. The estimates appear as a cohesive set of particles that move around the position of the target. From Figure 5, we can see that the estimate over node reaches a consensus very quickly by our adaptive weights update (32).

Snapshots of the estimates of all nodes for ConsenRKF regarding the target location (dotted circle) on the 1st (black ⋄), 20th (blue +), 80th (green □), 120th (black △), 160th (blue o), and 200th (red ×) steps.
6. Conclusion
The problem of consensus-based distributed tracking in wireless sensor networks (WSNs) with switching network topologies and outlier-corrupted sensor observations has been considered in this paper. To attack the outlier-corrupted measurements, a robust Kalman filtering scheme with weighted matrices on innovation sequences has been introduced. It has been proven that the proposed RKF possesses high robustness against outliers while having similar computational burden as traditional Kalman filter. To reach network-wide consensus, each node estimates the target state by an adaptive consensus strategy by using only communications between one-hop neighbors. Simulation examples have been included to demonstrate the robustness of the proposed RKF and effectiveness of adaptive consensus approach. Future work will be focused on nonlinear distributed estimation fusion by consensus strategy in switching ad hoc WSNs with non-Gaussian noises.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61104210, 61100140, and 61104072), the China Scholarship Council (CSC), and the Construct Program of the Key Discipline in Hunan Province. The authors would like to thank the anonymous reviewers and the guest editor for their comments that have improved the quality of the paper.