
Abstract
We propose a novel noise removal algorithm in color images. First, gradient is extended for color images. On this extended gradient, an algorithm called gradient peer group is used to detect the noise in color images and the peer group averaging algorithm is applied to remove the noise detected. The experiment shows that the proposed algorithm can detect and remove noise in color images effectively. The quality of images after noise removal is better than the ones reconstructed by other algorithms.
1. Introduction
In machine vision systems, many kinds of noise will interfere with the procedure of digital image generation and make the quality of images become poor. Therefore, in the machine vision systems, image filtering, smoothing, and other preprocessing technologies are used to enhance the images and eliminate the influence of noise. It has become an extremely important means in image processing and a focus of research in the field of image processing.
Median filter [1] and its extensions [2, 3] are commonly used in nonlinear filtering denoising algorithm. These algorithms assume that the noises are usually isolated points in the image. And using medium value of the pixels around instead of noises can effectively recover the image and preserve edge information well. Disadvantage of median filtering algorithm is using the same unified approach to image filtering and modifying a lot of nonnoise pixels. As a result, median filtering algorithm often damages the image quality, especially the image edge information, and results in blurred image. To solve this problem [4], we use a Teager operator-like method. It detects extreme values in the image first and make these extreme values as noise. Finally, apply median filter to these points of these extreme values. This method can largely avoid damage to the nonnoise pixel. The disadvantage of this method is that noise detection and filtering are applied to separate color channels and lead to a large deviation in the color reconstruction. And for an image with a lot of details, this method cannot guarantee a good retention of image details.
References [5, 6] proposed an image enhancement algorithm called peer group filtering, a.k.a. PGF. The algorithm is based on the following idea: for each pixel in the image, the adjacent pixels to it will belong to a peer group. The average of the other pixels in the same age group can be used to estimate the value of the pixel. Compared to the previous methods, PGF algorithm can effectively preserve the edge, corner, and other details of images while denoising. However, the noise determination of PGF algorithm is too strict and often miss some noise points.
In order to solve the problems of existing algorithms, this paper presents a gradient information based color image denoising algorithm. It uses gradient information to detect noise in the image and use the PGF algorithm for image denoising. Experimental results show that, no matter how many details in the image, the algorithms can remove the noise efficiently with a good noise detection method and preserve the image details as much as possible.
2. Gradient Information Based Denoising Algorithm
2.1. Definitions of Gradient of Color Images
Normally, the gradient is defined in a scalar field. Gradient is a vector in the direction of the greatest change in the scalar field and its magnitude is the corresponding change rate. For example, to a scalar function f(x1, x2, x3,…, x n ), its gradient is the result of (1). Consider

The gradient defined above is commonly used on the gray images and cannot be applied directly to the color images. In order to reflect the color change rate in color space, [7, 8] define three types of gradients to extract structural information from color images. These types of color gradient are easy to calculate and have high run-time efficiency. So, we choose two of them, the maximum gradient, Gmax, and the Euclidean gradient, Geuclid, in this paper. We abandon the Mahalanobis gradient because it has higher computation complexity and is not suitable in embedded application area.
Equation (2) defines the maximum gradient and the Euclidean gradient of the color images. Consider

2.2. Impact of Noise on the Gradient
Gradient is an indicator which reflects the speed of brightness changing, so the noise would affect the gradient of image. In particular, the impact noise will make a devastating effect on image pixel and lead to dramatic changes in the brightness of the pixel. Therefore, the magnitude of gradient around noisy pixel will be greatly improved.
Since the image consists of two-dimensional discrete signals, the method of image gradient calculation makes the gradient of 4-adjacency pixels change and the gradient of the noisy pixel itself not to change (assuming 4-adjacency pixels are not noise). Figure 1 illustrates this phenomenon. Figure 1 is a 3D view of image gradient of Figure 2(a). In Figure 1, there are four projections indicated by yellow circles. The central points of these positions have lower magnitude of gradient and the 4-adjacency pixels have much higher magnitude of gradient. Referring to Figure 2(a), these projections are the positions of noises.

Local part of magnitude image.
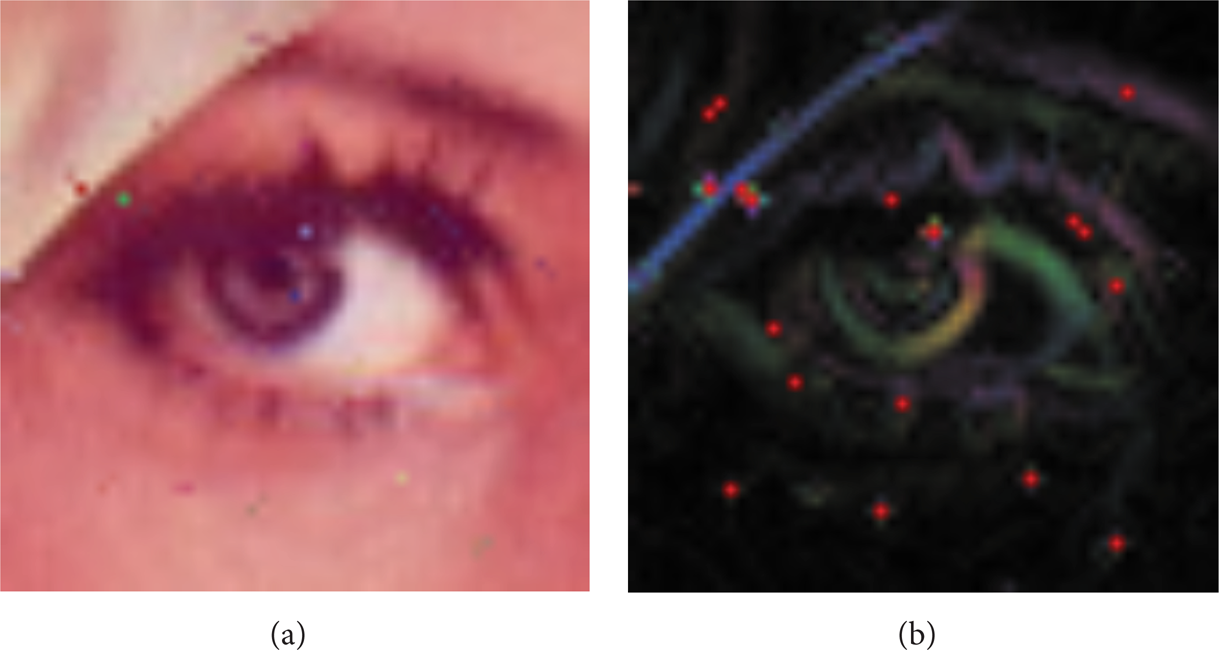
Noise detection of Lena image. (a) The noisy image; (b) the red points are the noises detected.
2.3. Noise Detection and Elimination Based on Image Gradient Information
Based on these ideas, we propose an algorithm based on gradient information of the image for noise detection. This algorithm searches the “Basin” pattern in gradient image to detect the noise in the color images. Since the gradient of edge in the image usually changes greatly, the gradient of central pixel is associated with the surrounding pixels, so the “Basin” pattern cannot be determined by setting a threshold of magnitude of gradient. To solve this problem, we propose the concept of gradient peer group as Definition 1. According to pixels gradient within a window, the pixels are divided into several peer groups. The “Basin” pattern can be determined uniformly by Definition 2.
Definition 1. g is the gradient corresponding to image X. In a w × w size window, gradient peer group G(m, w) includes n pixels which has the minimum magnitude difference g(i) to the central pixel X0.
Definition 2. The “Basin” pattern means that none of the 4-adjacency pixels of the central pixel X0 is in gradient peer group G(m, w).
Based on the above definitions, we can construct the gradient information based noise detection algorithm. Assume g is defined as the gradient of the original color image, the window size is w × w, X0 is the central pixel in the window, and g0 is the gradient magnitude of it. The remaining pixels in the window, X i , i = 0, 1,…, k = w2 − 1, are sorted by the magnitude distance d i to central pixel in ascending order according to (3). Consider

Construct a Fisher linear discriminant [9]. Consider
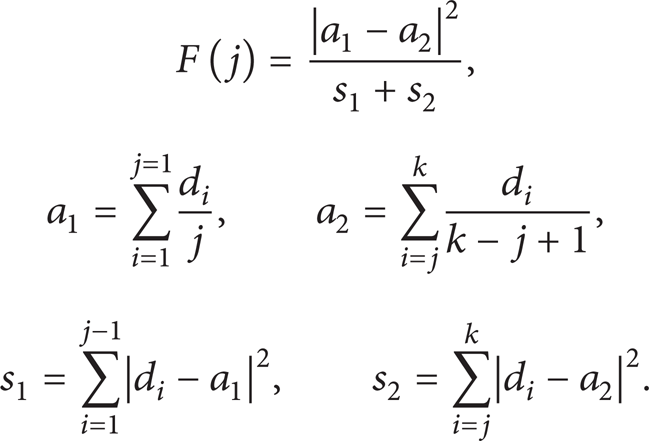
Then, the m which makes the function F(j) get the maximum value is the optimal partition,

Figure 2 shows the noise detection results of applying this algorithm to a noisy Lena image. It can be seen that the gradient information based noise detection algorithm can effectively detect the noises in the image. After noise detection, we use an averaging algorithm in gradient peer group to rebuild the noisy pixels, as shown in Figure 3.
Noise detection of Lena image. (a) The noisy image; (b) the red points are the noises detected.
3. Experiment
In order to verify the effectiveness of this denoising algorithm, we carried out some experiments which make comparisons to TEA algorithm [4] and PGF algorithm [6]. In these experiments, we used some standard images and superposed varying degrees of random noise on them. According to the different gradient calculation methods, the algorithm of this paper has two types: maximum gradient algorithm (Grad-M) and Euclidean gradient algorithm (Grad-E). In the experiments, all algorithms use RGB color space, and the window sizes are 3 × 3. The parameters of algorithms are adjusted to achieve the best results. Figure 4 shows the effect of various algorithms for the baboon image denoising.

Comparision of denoising algorithms. (a) Noisy image, (b) result of TEA, (c) result of PGF, and (d) result of this paper.
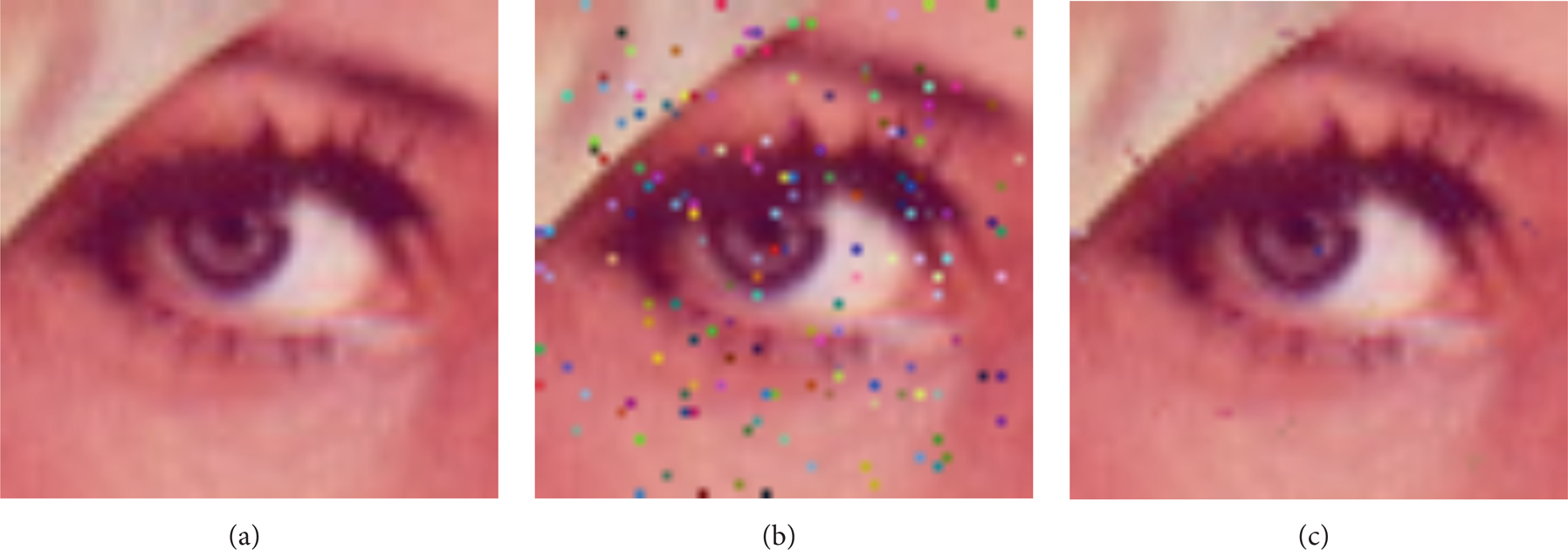
The results are shown in Tables 1 and 2. In these tables, “Intensity” indicates the percentage of the number of pixels damaged by noise. Column “None” indicates the PSNR value of the noisy image before denoising. It can be drawn from the tables that regardless of gradient type, the algorithm proposed by this paper can achieve better results than PGF and TEA algorithms under every noise intensity. The experimental results show that the difference of denoising effects of gradient types is relatively small, so we can consider that the impact of noise on various gradient types is substantially the same. Figure 5 shows the reconstruction results of PGF and the algorithm in this paper.
PSNR of denoising results on Pepper image (dB).

PSNR of denoising results on Baboon image (dB).


Reconstruction of noisy images. (a) Noisy images, (b) results of PGF, and (c) result of this paper.
4. Conclusion
This paper presents a denoising algorithm for color images based on gradient information. The algorithm uses gradient peer group to detect the noise pixel and then rebuilds the pixel through peer group averaging. Experiments show that the algorithm can effectively detect most of the noisy pixels in the image and then rebuild these noisy pixels in the case of preserving image details. After denoising, the image quality has been greatly improved. It achieves much better results than the reference image denoise algorithms. The proposed algorithm is effective for noise removal in images at medium noise densities. Due to the low computation complexity, this algorithm is suitable to the embedded and real-time application area.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.