
Abstract
Associative memory is essential to realize man-machine cooperation in the natural interaction between humans and robots. The establishment of associative memory model is to solve the problem. First, based on the theory of emotional energy, mood spontaneous metastasis model and stimulate metastasis model are put forward. Then we can achieve affective computing on the external excitation combining with Markov chain model which is about emotions of spontaneous metastasis and HMM model which is about stimulating metastasis. Second, based on the neural network, the associative memory model which is applied in emotional robots is put forward by calculating the emotional state of the robot's dynamic change of mind and considering their own needs at the same time. Finally, the model was applied to the emotional robot platform which we developed. The effect is validated better.
1. Introduction
The robots are becoming more and more important in our daily life. Besides completing their obligatory task, they are supposed to have other more characteristics such as emotion, personality, and social skills. The robot is able to adapt to the environment and participate in the natural interaction of human. The need of study on anthropomorphic emotions, behavior, and individuation is imperative.
Japanese and American universities and institutes carried out earlier research of the emotional robot, more concentrated in Waseda University and the Massachusetts Institute of Technology and developed rapidly [1, 2]. Recently, Germany and the UK have started research [3, 4]. The research on emotional humanoid robot appeared in China since 2002 [5]. One of the most advanced robots in China is “one hundred-Star” preschool robot developed by Harbin Institute of Technology which could show certain expressions [6]. In addition, the head of the “tong tong” robot born in 2004 developed by the Institute of Automation of Chinese Academy of Science [7] and the emotional robot which is designed by the University of Science and Technology Beijing can talk to people and generate expression [8]. The WE series expression robots of Waseca University, from the early WE-3 with the function of head-eye coordinated movement, which is only under the guidance of the vestibular eye reflex theory, developed into WE-4R with a model of mental state, which can use eyebrows, lips, jaw, and face as well as sound to coordinate expressed emotion and other more functions. And the progress is obvious. The same is true in Harbin Institute of Technology [9–11] and the Beijing University of Science and Technology [8, 12, 13] of China. An entertainment robot QRIO developed by Sony Corporation can make use of the visual information offered by the CCD camera installed on the head to control its movement and finish walking function. It achieves its behavior and movement choices through EGO Module [14, 15]. Besides, lots of emotional computing theories and technologies are put into use in man-machine interaction to improve the experience of man-machine interaction [16–18].
Most of the researches of the emotional robot finish their response based on a series of identifying information. But the person's response to the outside world is based on their own mental state and memory. As a result, we put forward a model of associative memory applied in emotional robot to get the most memory and apply it to the emotional robot platform developed by us according to the external stimulus.
The sections are organized as follows. Section 2 gives a brief introduction on the emotional robot platform developed by us. Section 3 is mainly about putting forward the two processes of change of mood through the research on the model of emotion, especially the model of mood. Based on Section 3, Section 4 comes up with the model of associative memory applied in emotional robot on the basis of the need and state of mood. It also gets verification on the emotional robot platform. Section 5 gives the related research conclusions.
2. The Platform of Emotional Robot
The holder of the emotional robot which supports the whole body is processed by duralumin. Many steering gears, which control brows, mouth, eyes of the robot, and circuit board, which controls the steering gear are installed on the holder. To make an emotional robot you need four steps: firstly, design three-dimensional mechanical structure; in this process CAXA entity 2006 is used to design three-dimensional draft; secondly, process and distribute the mechanical structure to ensure the weight and the intensity; most of the parts are made of duralumin(LY12); thirdly, install and fix the glass reinforced plastic shell and eye ball as well as eyelid; fourthly, make and install silica gel tegmen, facial expression, hair, eye lash, and brow, color the eye ball, and put on makeup. The process of making emotional robots is as presented in Figure 1.

Humanoid robot production process. (a) Three-dimensional structure design; (b) mechanical design; (c) housing design; (d) skin installation; (e) prototype humanoid robot.
Emotional robot system consists of upper-position computer and lower-position computer, as shown in Figure 2. Lower-position computer is responsible for detecting environmental changes, controlling steering exercise; upper-position computer completes machine vision, speech recognition, speech synthesis, and other tasks. The proposed associative memory model will be deployed on upper-position computer system and realize the associative memory of emotion robot through the cooperation of the upper-position computer and lower-position computer.
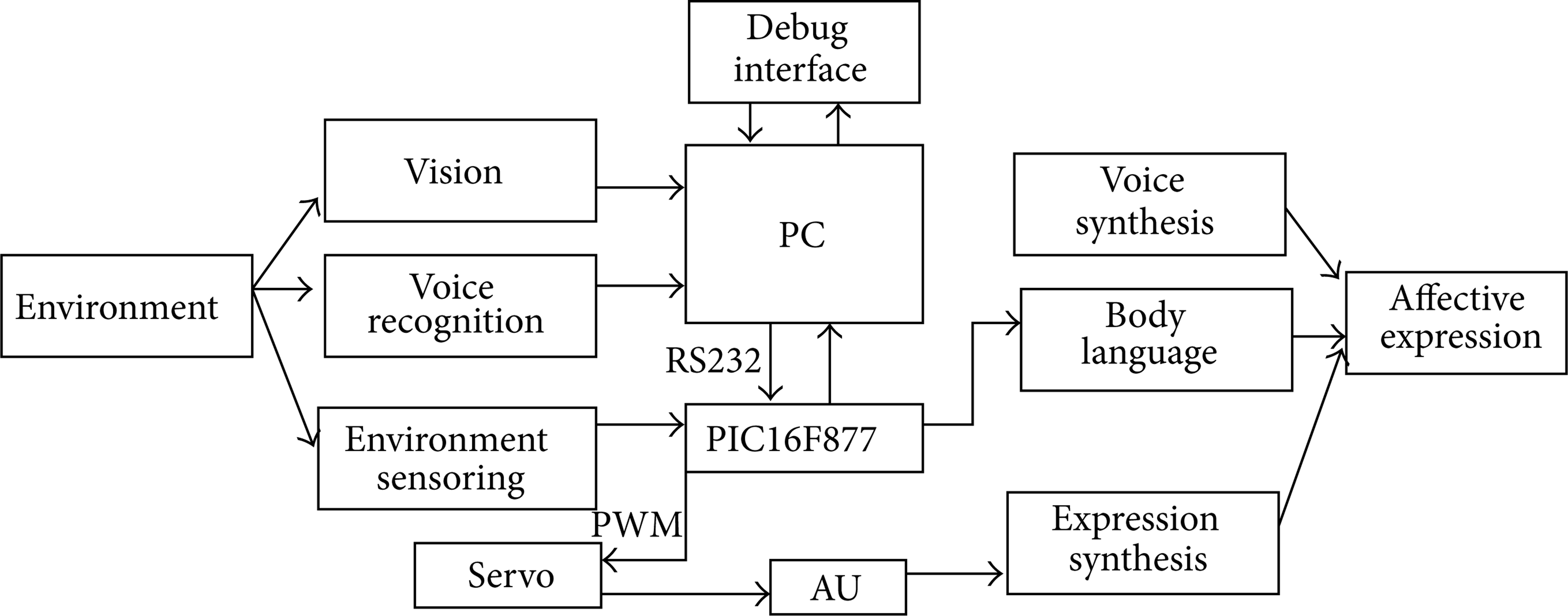
Robot's architecture.
3. Mood and Emotion Model
3.1. Emotional Energy
Feeling can be broadly divided into mood and emotion, so the transferring process can be classified into four types under different conditions as shown in Figure 3.

Mood and emotion state transferring graph.
Figure 3 illustrates the four processes. (1) Emotion state transferring by stimulus: under the stimulus of the outward events, the emotion state transfers from dynamic equilibrium state of mind to a certain level of emotional arousal excited state, indicated by the line A. (2) Emotion state transferring by itself: when the external stimulus ends, some kind of emotion state in the excited state will spontaneously transfer to the state of dynamic balance of mood in a certain time, indicated by the line B. (3) Mood states transferring by stimulus: under the stimulus of some specific external events, mood state will transfer in the center of state of dynamic equilibrium within a certain range, indicated by the line C. (4) Mood state transferring by itself: after the external stimulus disappears, some kind of excited state of mind will spontaneously transfer to dynamic balance of mood state in a certain period of time, indicated by the line D.
Taking these four processes, playmates robots for children contain 4 personalized emotion models, namely, (1) stochastic process model in the transfer process of emotion state by stimulus; (2) Markov chain model in the transfer process of emotion state by itself; (3) cybernetics model under mood states transferring by stimulus; (4) dynamic equilibrium model under mood states transferring by stimulus. Four models complement each other and affect each other in the 4 processes. Therefore, their theory is consistent. On the basis of mental energy in psychology, Teng Shaodong put forward the concept of emotional energy. It is the starting point and foundation of the personalized emotional model in this paper.
Mental energy is the capacity to push individuals to a variety of mental activities and acts, indicated by E. It has two kinds of basic forms:
free mental energy Eη;
constrained mental energy Eλ [19]. They suit the following:

The emotional energy can be expressed by the following formula:

Simultaneously, suppose that
According to Pavlov's advanced neural theory, due to physiological reasons, nerve cells of human will change regularly between the two states of excitation and inhibition according to certain physiological mechanisms, and along with this kind of change, individual's state of consciousness will also convert between clearness and unclearness; thus, when emotional energy E p expresses itself, its performance levels also show the periodic change. Emotional energy is defined by

whose physical constraint can be activated (it is the actual emotional energy used for the performance of emotion), α (0 ≤ α ≤ 1) is physiological arousal, and the emotional energy is defined as

as physiologically inhibited emotional energy (it is the emotional energy used for the performance of mood); β (0 ≤ β ≤ 1) as physiological suppression. And there is the following:

where α and β are mainly adjusted by physiological mechanism periodically, that is, “biological clock” adjustment. In addition, α and β will also be affected by the interference of some external stimulation. Various forms of mental and emotional energy as well as transformation relationship are shown in Figure 4.

Various kinds and transformation relationship of affective energy.
From the point of view of dynamic psychology, the process in which individuals produce a variety of different emotions is actually the process of activated emotional energy E p α to be dynamically allocated between different emotional states; this relationship can be reflected in the left lower half part of Figure 4.
Suppose that
Physiologically inhibited emotional energy E p β changes between positive and negative mood, and mood intensity changes caused by it are shown in the right lower half part of Figure 4.
Accordingly, suppose that
Then,
Component i belongs to positive mood in condition 1 and negative mood in condition 2. M p βt is the mental intensity at moment t. The calculation method will be described later.
Suppose that |E pi βt| ∈ [0, 1], i ∈ {1, 2,…, N} is to be component of energy value of physiologically inhibited emotional energy in each dimension. According to emotional energy conservation law, we can establish the following formula:

Suppose 0 ≤ E pi αt ≤ 1, − 1 ≤ E pi βt ≤ 1, and define three kinds of operations: +, −, Δ. +, − is similar to addition and subtraction in real numbers, without the commutative properties in addition. That is, when for all E pi at ∈ [0, 1], E pi βt ∈ [− 1, 1], we can get E pi at + E pi βt≠E pi βt + E pi at . Definition of Δ is

Since feeling can be divided into mood and emotion, emotional intensity at moment t can be defined as

Formula (10) shows that the emotional intensity at moment t is associated with mental and emotional intensity. In the above 4 transformation processes, how to solve emotional intensity can refer to the text [19], and we will introduce how to solve mental intensity later.
3.2. Spontaneous Metastasis of Mood
According to Larsen, mean, stable characteristics of mood cannot reflect actual characteristics of individual's state of mind. As time goes on, property (good or bad) and intensity (weak or extreme) will both change [5]. Parkinson believes that mood dynamics-related theories include theory of dynamic equilibrium, theory of social traction, and theory of nonlinear dynamics. He sorts factors that affect mood into three types; one of them comes from the individual endogenous factors such as personality and physiological factors [6]. Mood spontaneous metastasis model in this text is based on endogenous perspective of individual.
3.2.1. The Impact of Personality on Mood
For different people, they may experience different states of mind. In other words, there are individual differences. This difference comes from the relatively stable personality. Simultaneously, personal characteristics in turn determine the level of mind and mood variability; mood spontaneously fluctuates at a relatively stable level in the vicinity of mind characteristic. We use C to express the level of mind characteristics determined by the personality, as the horizontal line in the lower right portion of Figure 2 described. Influenced by a variety of factors, C changes within a certain range around positive and negative boundary. This text assumes C ∈ [− 1, + 1].
3.2.2. Impact of Physiological Factors on Mood
Individual physiological cycle will cause fluctuation between the positive and negative mood over time.
(1) The Fluctuation of Mood in Day and Night. According to Watson's study, positive mood in the morning of the day tends to be lower; then in a certain time of day it rises to the maximum; then it gradually decreased to a minimum in the evening. This process is expressed by a cosine function σcos (ω1·t), where σ is the circadian impact factor of the mood and 2π/ω1 is the circadian mood fluctuation cycle.
(2) The Weekly Changes of Mood. According to the study of Larsen and Kasimatis, the 7-day interval with sine explains the daily mood changes. Positive mood reaches a peak on Friday and a minimum on Tuesday. This process is expressed by a sine function ςsin(ω2·t), where ς is the impact factor of the weekly changes of mood and 2π/ω2 is the weekly changes of mood cycle.
(3) The Monthly Changes of Mood. These changes mainly aim at the mood effects of women's menstrual cycle; therefore, the impact of this on mood is personalized and with gender differences. This process is expressed by a sine function τsin(ω3·t), where τ is the impact factor of the monthly changes of mood and 2π/ω3 is the monthly changes of mood cycles.
(4) The Seasonal Changes of Mind. Positive mood is higher in spring, then gradually decreases during the summer and autumn, and finally ultimately reaches the lowest point in winter. This process is expressed by a sine function υsin(ω4·t), where υ is the impact factor of the seasonal changes of mood and 2π/ω4 is the seasonal changes of mood cycles.
And σ, ς, τ, υ ∈ [0, 1], σ + ς + τ + υ = 1, ω1 = 7ω2 = 30ω3 = 365ω4. In this paper, for male users, let σ = 0.7, ς = 0.2, τ = 0, and υ = 0.1; for female users, let σ = 0.5, ς = 0.2, τ = 0.2, and υ = 0.1. Because changes in mood can often slow and last for a period of time, therefore, in this paper the mood measures are calculated once an hour. In the model of the changes of mood in day and night, the cycle takes 24 hours; then ω1 = 2π/24.
Personality and physiological factors jointly impact the dynamic changes of mood. Define mood impact factor of personality as ψ and mood factor of physiological factor as ξ; then,

Set up mood spontaneous metastasis model as follows:

Determination of dynamic range for

so,
For C ∈ [− 1, + 1], we have

In this paper, take ψ = 0.5, ξ = 0.5.
In the above parameters when letting ω i , i ∈ {1, 2, 3, 4} take lager value; the corresponding period of physiological changes caused by fluctuations in mood as time t period is smaller; that is, the mood changes are stronger.
3.3. Stimulate Mood Shift
With the stimulation of external factors and situations, both mood and emotions will be affected. But the process of change is different: first, the difference on duration; second, the difference on relative intensity; third, the difference on signal function. In the paper [19], to study the process of change after emotion being stimulated, we make use of HMM, a dual and random process, to construct an emotional model of the transfer process of the emotional state, using the forward and backward algorithm of HMM to simulate emotions in the variation of the external stimulation. This method will be described in the following. And to study the process of change after mood being stimulated, we would use the adjustment strategy of control theory.
Larsen proposed that control theory should be applied to the dynamic process of mood regulation [8]. Based on this view, the passage makes a model on the process of stimulation and transformation of mood.
According to existing research, mood response to stimulus intensity is slightly flat and one order inertial link is more suitable to be described.
In this paper, the mood of the stimulus transfer model can be defined as

In this formula, T is a time constant of mood transformation which is an important parameter characterizing transferred inertia of mood. Studies have found that women may be more susceptible than men to infection or emotional impact; therefore, T is also one of the parameters that gender differences impact mood; and is one of the personalization parameters. This parameter will be described later on mood exciting process. Eevent(t) are exogenous factors (such as work, life events, and family tragedies, etc.) on the impact of strength of mind. Mood stimulus transfer process is divided into two subprocesses.
3.3.1. Subprocesses of Mood Stipulation
This subprocess is a process similar to the zero-state response. Assuming that, at the time of tthe mood is excited by exogenous factors, the initial value of strength of mind is

Under this condition, formula (16) represents the model of mood stimulation and transition:
where, in L[·], L−1[·] are Laplace transform and inverse transform, respectively.
According to the basic concepts in psychology of time dynamics of emotional reaction, you can define the mood in the corresponding concept.
T
s
is known as regulation time of mood reaction; T
s
≈ 4T. This parameter expresses the shortest time of mood changing from the initial intensity
T
d
refers to the delay time of mood response; T
d
≈ 0.69T. This parameter expresses the time that mood needs to change from the initial strength
If T
r
stands for raising time of mood reactions, T
r
≈ 2.20T. T
r
expresses the time needed by changes of mood response strength from
According to the above three definitions, we can see that the speed of regulation time of mood response, mood response delay time, and duration of mood response rise may contain important information of individual differences. These three values are associated with mood transfer time. Therefore, T is one of impact parameters which are involved in the impact that gender differences have on mood. It is an individual parameter. The size of it has influence on stimulation process of mood.
Figure 5(a) is the mood stimulating subprocess; when T = 0.5 and T = 0.9, Eevent(t) = 1. As we can see from the figure, mood response regulation time, mood response delay time, and mood response rise time are all different, which reflects the impact that gender differences have on the mood.

Mood stimulating subprocess and change rate of strength.
Strength of mood constantly becomes large under continuous excitation in an exogenous factor, which shows the impact of the incident on the accumulation over time. However, change rate constantly becomes small; namely, the longer the time is, the smaller the impact is. It shows that mood becomes less sensitive and even becomes numb at a particular time stimulus, as Figure 5(b) shows.
3.3.2. Mood Attenuation Subprocess
This subprocess is similar to a zero input response process and comes up after mood stimulating subprocess. We assume that exogenous factor has no impact on mood at t, Eevent(t) = 0, and at first the strength of mood is
For this situation, mood stimuli transferring model could be solved as follows:
where L[·], L−1[·] mean Laplace transform and inverse transform.
4. Associative Memory Model
Associative memory reflects the connections between related things. Human memory is related to mood. On one hand, memory stored in a certain mood will emerge when the same mood occurs, which is known as the mood-dependent. On the other hand, mood helps get the memory stored under the same mood, called mood congruent. Generally speaking, Happy mood is easy to hark back happy memories; on the contrary, unhappy mood is easy to think of unhappy memories. In addition, demand factors also need to be considered for the memories. Based on Maslow's theory of the demand structure, after meeting the physiological needs layer and layer of security requirements, with which cognitive demand will combine to establish an emotional robot associative memory model. When the robot has a thirst for knowledge, it has a strong memory. According to the mood and cognitive needs’ impact on the associative memory and neural networks, this paper proposes a kind of mood-congruent associative memory model.
We assume that emotional robot needs vector to be
Emotional robot's cognitive needs, strength of mood.

According to Table 1, the network of the training data is divided into six groups. N
E
small shows that cognitive needs are small and N
E
large shows that cognitive needs are large
When associative memory training to the emotional robot begins, the memory error decreases rapidly, reflecting the robot's fast memory capacity for new things.
Afterwards, the memory error began to diminish until it is conducted for the 2000th time, it stops changing anymore, and associative memory training has been generally completed as in Figure 6.

Process of associate memory training for emotional robot.
In order to prove the effectiveness of the above-mentioned associative memory model, we tested it after the training process. Different outputs can be checked from Figure 7.

Memorizing capability with different objects.
As it can be seen in Figure 7, for Object 1, the robot's memorizing capability is weak due to low recognition demand and passive mood; for Object 2, the robot's memorizing capability remained intermediate due to low recognition demand and peaceful mood; for Object 6, the robot's memorizing capability is strong due to high recognition demand and positive mood. The results for Objects 3, 4, and 5 show a similar situation. As it is shown as the training process, the memorizing capability of emotion robots is closely related to its mood. The two are consistent with each other. This has proved the associative memory model of emotion robot effective.
5. Conclusions
This paper proposed an associative memory model which is consistent with moods. When it is applied to develop emotion robot, robot can obtain correct memory according to external motivation. Based on emotional energy, this paper set up automatic transfer model with individual internal factors and built up mood-motivating transfer model with controlling theory. Finally, the robot can obtain memorizing capability based on external motivation and internal demands.
Conflict of Interests
The authors declared that they have no conflict of interests regarding this work.
Footnotes
Acknowledgments
Thanks are due to the financial support from the fund of the projects as follows: (1) the National Natural Science foundation of China (no. 61170117) and ![]() the National 973 Program of China (no. 2011CB505402).
the National 973 Program of China (no. 2011CB505402).