
Abstract
Application of robot to prosthodontics and orthodontics is a novel application of robot technology in medical field. This kind of robots can realize the manufacturing of complete or partial denture, dental implantology, and the bending of archwire. We have conducted a critical review on the development of application of robot in prosthodontics and orthodontics to identify the limitations of existing studies and clarify some promising research directions in this field. This paper is presented to summarize our findings and understanding. The main problems in its development are analyzed, the development trend is foreseen, and the future research is discussed.
1. Introduction
Robot can not only increase the productivity of the workers, taking the place of human to do the repeated, boring, and dangerous work, but also accomplish some work where human is not competent [1]. Therefore, robot is paid much attention and widely used increasingly. Since the 1990s, the application of robot is gradually extended from the traditional industrial areas to families and medical and other fields. In 1994, the First International Symposium on Medical Robotics and Computer Assisted Surgery is held in Pittsburgh Pennsylvania, USA. Thus, in many developed countries, such as the United States, Italy, Japan, and other countries, the government and academia focus on the development of medical robot system and deploy plenty of manpower and financial resources on the research field [2, 3]. In the past few years, the production value of electronic medical devices, developed on the basis of medical robots system, is growing at 10 percent a year. This is more than the industrial growth rate. In the next five years, it is estimated that medical robot is still growing at 20∼40 percent a year [4–8]. The governments of the countries around the world not only hope that the research of medical robot system brings convenience to the treatment of diseases and produces good social effects. They also hope it can generate a new economic growth point and bring better economic benefit.
According to the American Dental Association, approximately 113 million American adults are missing at least one tooth, and 19 million have no teeth at all [9, 10]. After loss of the natural dentition, craniofacial morphology changes and vocal and masticatory functions are seriously affected. In order to recover the craniofacial morphology and physiological functions of edentulous patients and protect the health of the TMJs (temporomandibular joints), prosthodontics is needed in a timely manner [11]. Malocclusion is the common oral diseases, and malocclusion will affect the oral health and function, as well as appearance. Furthermore, dyspepsia and other gastrointestinal diseases are caused by lower masticatory function. Currently, prevalence rate of malocclusion reaches up to 68 percent in China. Fixed appliance technology is the most common and effective malocclusion orthodontic treatment method, and the key step of fixed appliance technology is the bending of orthodontic archwire. Traditional prosthodontics and orthodontics are largely based on visual assessment and manual operation. Cooperation between experienced dental specialist and skilled technician is often needed to produce high quality dentures with low revision rate. Because of archwire hyperelasticity, shape complexity of formed archwire, and the uncertainty of manual operation, it is difficult to realize the personalized archwire bending. This has caused high level of randomness and put many restrictions on clinical prosthodontics and orthodontics [12]. Application of robot in surgery and other medical fields reminds us that an automatic system may also be able to play an important role in prosthodontics and orthodontics.
With the development of robotics and artificial intelligence theory, and the urgent requirements of prosthodontics and orthodontics, a new type of medical robot, such as robot in prosthodontics and orthodontics, is appeared. Robot in prosthodontics and orthodontics can realize the following functions, such as the manufacturing of complete or partial denture, dental implantology, and the bending of archwire. Rich experience and technique between experienced dental specialist and skilled technician is integrated to the software of prosthodontics and orthodontics expert system. Then robot in prosthodontics and orthodontics realizes the manufacturing of complete or partial denture, dental implantology, and the bending of archwire. Robot in prosthodontics and orthodontics is a whole new application of robotics in medical field. The study about robot in prosthodontics and orthodontics also will be a theoretical and technical innovation and breakthrough. Its successful application will not only realize the quantification of complete denture or partial restoration, dental implantology, and the bending of archwire, but also promote the development of prosthodontics, orthodontics, and relative fundamental theory.
2. State of the Art of Application of Robot in Prosthodontics and Orthodontics
2.1. Tooth-Arrangement Robot
Single manipulator robot system for the manufacture of complete denture is developed using 6DOF (degree of freedom) CRS robot produced by Canada. The structure, tooth-arrangement algorithm, and motion control of single manipulator tooth-arrangement robot system are studied [13–15]. Single manipulator tooth-arrangement robot system for complete denture is shown in Figure 1, which consists of the following components: 6DOF CRS robot, electromagnetic gripper, computer, a central control system with tooth-arrangement and robot control software for tooth-arrangement, motion planning and control, denture base, light source device, and light-sensitive glue [16–18]. Three-dimensional virtual tooth-arrangement software is programmed based on VC++ and OpenGL. The functions of the virtual tooth-arrangement software are as follows. (1) Choose or create medical history files of a patient, draw a jaw arch and dental arch curves by expert's experience according to the jaw arch parameters of the patient, and adjust the dental arch curve by expert's experience reasonably. (2) Display three dimensional virtual dentitions on the screen, provide a virtual observation environment for designed dentitions, and interactively modify each tooth posture. The robot control software is programmed based on RAPL language. The functions of the robot control software are used to calibrate tooth-arrangement initial position for tooth-arrangement robot, create control data profile for real tooth-arrangement with the robot, and control the robot for tooth-arrangement operation. The maximum load of this robot system is 3 Kg, the maximum line velocity is 4.35 m/s, and the repeated positioning accuracy is ±0.05 mm. An experiment of complete denture manufacturing is implemented using this robot system. The completed upper as well as lower dentition for a patient having no clinical experience is obtained. Figure 2 shows the working process of the single manipulator robot tooth-arrangement robot system for complete denture.

Single manipulator tooth-arrangement robot system for complete denture.

Working process of the single manipulator robot tooth-arrangement robot system for complete denture.
The realization scheme of tooth-arrangement multifinger hand is designed based on MOTOMAN UP6 robot. The structure, grasping theory and simulation, and workspace analysis of tooth-arrangement multifinger hand are studied [19–21]. This multifinger hand has three fingers: each finger has three degrees of freedom. On the basis of the analysis of workspace and motion simulation, this multifinger hand can meet the tooth-arrangement requirements theoretically. However, artificial teeth are very complicated in shape and not easy to be grasped and manipulated accurately by a multifinger hand.
84DOF multimanipulator tooth-arrangement robot, which is shown in Figure 3, is designed. There are 14 independent manipulators on the dental arch curve. Each of them can move along its own trail to satisfy the requirement for each tooth's position on the dental arch curve. These manipulators support every tooth by a tooth-arrangement helper and provide the controls with six degrees of freedom (three rotations and three movements) to adjust each tooth for its position along X, Y, Z, lingual, rotation, and near-far-medium directions. This robot system is driven by 84 motors. Combining with the tooth-arrangement helper, this robot can realize any posture in the artificial teeth space. Without grasping the artificial teeth directly, it can also solve many problems that a single robot has difficulty with, for example, grasping and sequentially locating artificial teeth during a tooth-arrangement process [22].

Structure of the 84DOF multimanipulator tooth-arrangement robot.
For 84DOF multimanipulator tooth-arrangement robot, because the amount of driven motor is as many as 84, it is difficult to realize the control and kinematic calculation of this robot system. Aiming at this problem, the tooth-arrangement strategy is proposed based on the combination of dental arch curve generator and tooth-arrangement helper [23]. Figure 4 shows the 50DOF multimanipulator tooth-arrangement robot system. It consists of 14 independent manipulators, a dental arch generator, and a slipway mechanism. The slipway mechanism is used to achieve a 5-point (one fixed-point and four moving-points) control for the dental arch curve generator, which is used to create a dental arch curve that matches the one from a patient's oral cavity. There are 14 manipulators on the flexible dental arch curve generator. Each of them can move along its own trail to satisfy the requirement for each tooth's rotation. These manipulators support every tooth by a tooth-arrangement helper and provide the controls with three degrees of freedom (two rotations and one movement) to adjust each tooth for its position along Z, lingual, and near-far-medium directions. Two parallel vertical bolt bars are placed under every single manipulator and each of the bolt bars is connected to a flexible steel shaft driven by a stepper motor. Through coupling, the stepper motor drives the flexible shaft to rotate, which makes the bolt bar rotating with it. When the two bolt bars rotate uniformly, the rolling frame moves up and down with the rotating shaft of the near-far-medium direction, which moves conjugate with the tooth. Since the tooth-arrangement helper is fixed on the rotating shaft by a dowelled connection, one traveling freedom is achieved in this way. When the two bolt bars rotate inconsistently, the rolling frame rotates, bringing along the rotation of tooth-arrangement helper, and so the ligula direction can be realized. Rotating shaft of near-far-medium direction itself is connected with flexible shaft and driven by a stepping motor. It can drive the tooth-arrangement helper rotation and the near-far-medium direction is thus achieved. As described above, the manipulator moves with three degrees of freedom. Thus the amount of driven motors is decreased to 50. Furthermore, the mechanism is simple, dexterous, and easy to control. The related researches about the coordinated control of dental arch generator [24], high precision synchronous control of 50DOF multimanipulator tooth-arrangement robot based on software timer [25], and the kinematic analysis and planning [26–30] are studied. The manufacturing process of complete denture only takes about 30 minutes using this robot system. The accuracy of the robotic system is measured. The repeated positioning accuracy is ±0.07 mm for a single manipulator and ±0.10 mm for the whole robot system. Figure 5 shows the complete denture made by the 50DOF multimanipulator tooth-arrangement robot system.

50DOF multimanipulator tooth-arrangement robot system.

Complete denture made by the 50DOF multimanipulator tooth-arrangement robot system.
Aiming at the problem of traditional manufacturing methods of complete dentures, a concept of professional and miniaturized Cartesian type robot for tooth-arrangement is put forward based on TRIZ theory. The three-dimensional structure of Cartesian type tooth-arrangement robot is designed. The kinematic simulation and analysis is performed using ADAMS [31, 32]. Virtual prototype for tooth-arrangement robot of Cartesian type is as shown in Figure 6.

Virtual prototype for tooth-arrangement robot of Cartesian type.
2.2. Dental Implantology Robot
In dental implant research, many unsolved problems concern the interfacial stress distributions between the implant components, as well as between the implant surface and contacting bone. To obtain a mechanical understanding of how vertical and horizontal occlusal forces are distributed, it is crucial to develop in vitro testing systems to measure the force transmission between dental implants and attached prostheses. Figure 7 shows the measurement system for mastication force after dental implantology established by University of Kentucky [33]. The system has been designed to produce simulated mandibular movements and occlusal contact forces so that various implant designs and procedures can be thoroughly tested and evaluated before animal testing or human clinical trials. Two commonly used fixed prosthesis designs used to connect an implant and a tooth, a rigid connection, and a nonrigid connection were fabricated and used for experimental verification. The displacement and force distributions generated during simulated chewing activities were measured in vitro. Force levels, potentially harmful to human bone surrounding the connected dental implant and tooth, were analyzed. These results are useful in the design of prostheses and connecting components that will reduce failures and limit stress transfer to the implant/bone interface.
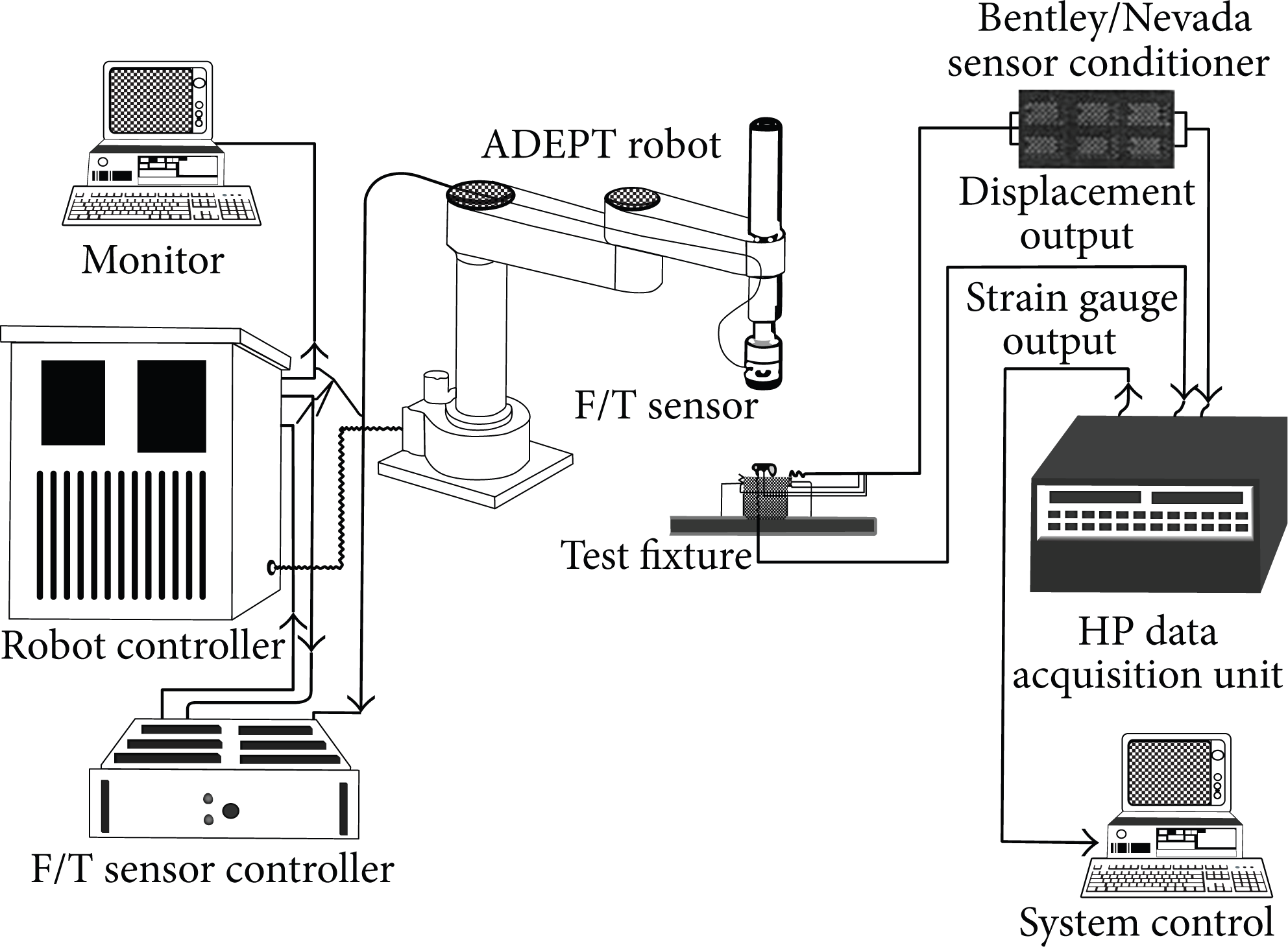
Measurement system for mastication force after dental implantology.
Robotic implant denture workbench, from preoperative planning to splint drilling [34], which is established by Ecole des Mines de Paris in France, and Umeå Universitet in Sweden, is as shown in Figure 8. A new method for dental implant surgery is presented. A preoperative planning software is programmed and used to work with CT scanner data. A 3D reconstructed model of the patient's jaw is established. Implant fixtures are placed with the help of a 3D reconstructed model of the patient's jaw. An accurate robot is then used to drill a jaw splint, at the locations determined with the planning software, in order to make a surgical guide. The robot has five degrees of freedom (three translations and two rotations). It has a ±0.04 mm translation accuracy and a ±0.15° rotation accuracy. By pointing the radio-opaque balls with the robot, the location of these balls in the robot referential is determined with an accuracy close to 0.3 mm; by pointing them in the CT scanner images, their location in the scanner referential is also determined, with an accuracy close to 0.25 mm. A first case has been treated with this new protocol, at the Department of Oral and Maxillofacial Surgery of Umeå University, in Sweden. The patient was an upper jaw edentulous woman. Because of a strong bone resorption, she had a bone graft before the implant surgery. An 8-implant treatment was planned using the preoperative planning software. Figure 9 shows the robot drilling the patient's jaw splint. Figure 10 shows the position of the fixture implants placed in the jaw after drilling. The experimental result shows that all implants are precisely placed at the right location.

Robotic implant denture workbench, from preoperative planning to splint drilling.

Robot drilling the patient's jaw splint.

Position of the fixture implants placed in the jaw after drilling.
The use of a robot for drilling the implant site in preparation for the insertion of the implant is proposed [35]. An image-guided robotic system for automated dental implantation is described. Patient-specific 3D models are reconstructed from preoperative Cone-beam CT images, and implantation planning is performed with these virtual models. A two-step registration procedure is applied to transform the preoperative plan of the implant insertion into intraoperative operations of the robot with the help of a Coordinate Measurement Machine. Experiments are carried out with a phantom that is generated from the patient-specific 3D model. Fiducial Registration Error and Target Registration Error values are calculated to evaluate the accuracy of the registration procedure. This research laid a foundation for automatic robotic dental implantation.
Dental implantology system using the ABB IRB2400/M98 robot is established by University of Coimbra, in Portugal, is as shown in Figure 11 [36]. The system includes an industrial robot manipulator, a data acquisition board, strain gauges for stress/strain evaluation, and a force/torque sensor (equipped with accelerometers) placed on the robot wrist. This system can realize drilling and implant insertion. The robot is equipped with a tool changer and is used in two different tasks: (1) to perform the implant drilling operation with the help of a dental drilling tool; (2) to apply pressure on the assembled implants to simulate the mastication process. The system software, which consists of robot calibration module, drill plan module, load plan module, drill execution module, and acquisition data module, is programmed based on Matlab. The optimal number of implants and their placement/orientation is studied through the implant force, and the stress/strain analysis of jaw bone tissue with the different drilling posture, but without considering the drilling depth influence on the implant force, and the stress/strain analysis of jaw bone tissue.
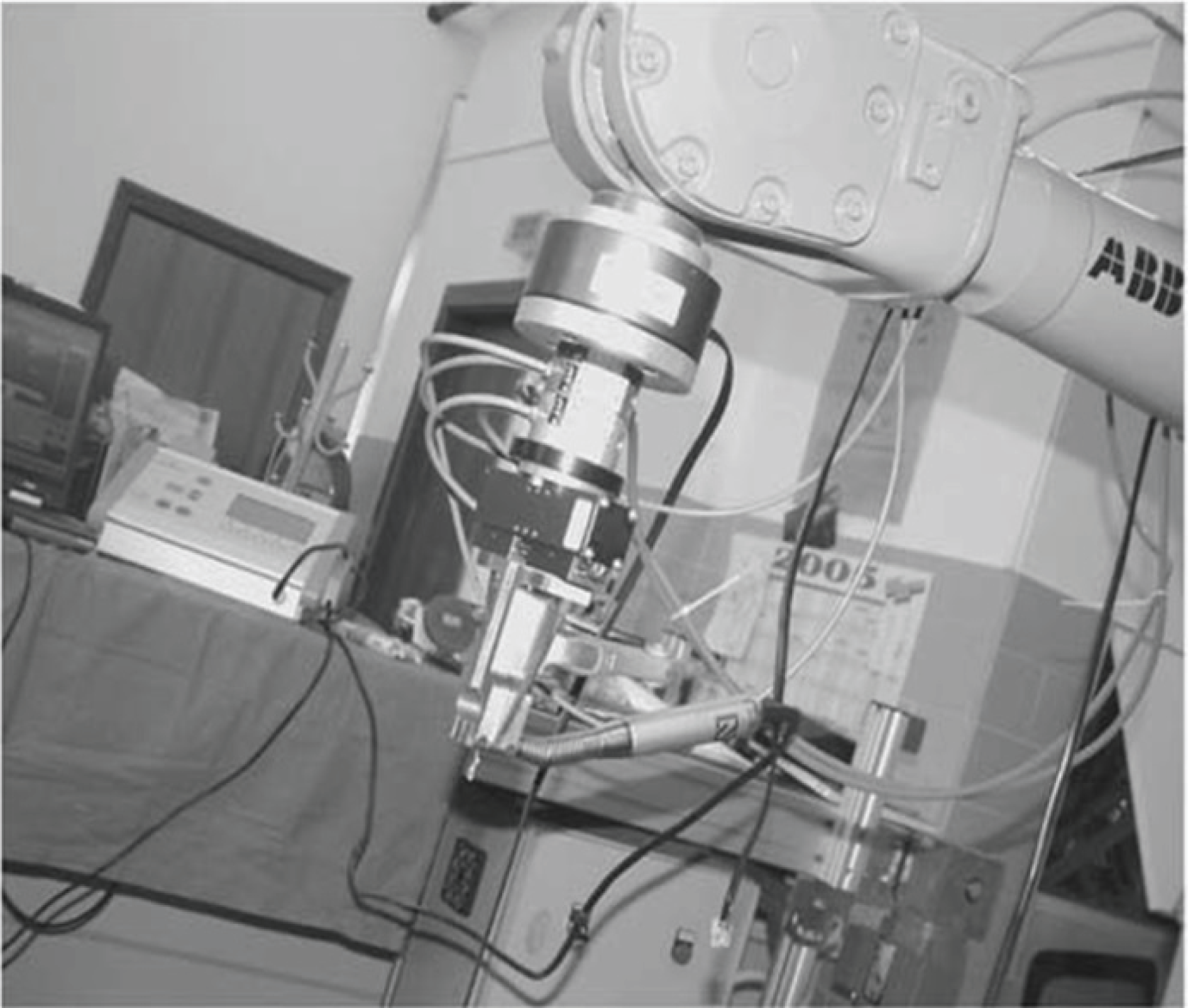
Dental implantology system using the ABB IRB2400/M98 robot.
A computer assisted preoperative planning and surgical navigation system in dental implantology is constructed [37]. It consists of two main subsystems: preoperative planning and surgical navigation. In the preoperative planning subsystem, different kinds of views to the surgeons based on CT data scanned for a specific patient are provided. And the surgical navigation subsystem uses an infrared light based navigation camera to locate the precise position of the surgical instrument. The two subsystems will combine together to form a seamless linked all-in-one system for dental implantological surgery. The depth and orientation of drilling will be tracked under the same coordinate space, which will guarantee the accuracy of match between the preoperative planned position and the real-time navigated position. The experiments in phantom study demonstrate that the mean errors of the depth and the angle are 0.772 mm and 0.554°, respectively.
Implant surgery system constructed by the University of Duesseldorf is as shown in Figure 12. The system includes a robot arm, angle sensors, torque sensors, a precision potentiometer, the driver shaft, and mini-implants in bone. This system is used to analyze the impact of the insertion angle, the insertion depth, and predrilling diameter on the implant torque and primary stability of mini-implants [38, 39]. The experimental results show that the highest insertion torque value locates at angles between 60° and 70° (63.8° for Dual-Top 1.6 mm and 66.7° for Dual-Top 2.0 mm). Higher insertion depths result in higher insertion torques and thus primary stability. Larger predrilling diameters result in lower insertion torques. Very oblique insertion angles (30°) result in reduced primary stability. Implant diameter has a great impact on insertion torque and hence primary stability of orthodontic mini-implants. If the available space between two adjacent roots is small, a more oblique direction of insertion seems to be favorable to minimize the risk of root contact. Very high insertion torques may lead to higher failure rates caused by excessive bone compression; thus the appropriate ratio between implant and predrilling diameter is crucial.

Implant surgery system constructed by the University of Duesseldorf.
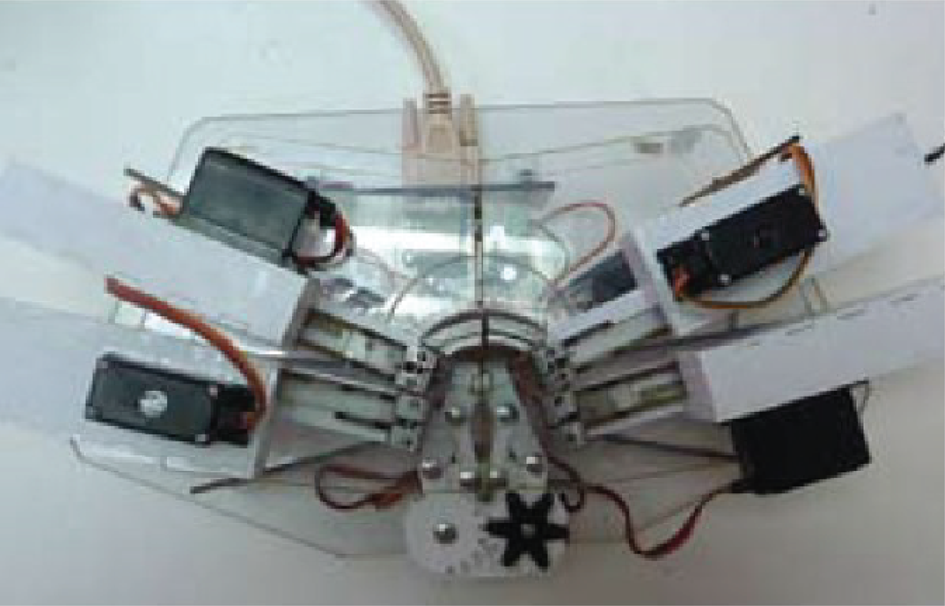
Human-robot cooperative manipulator for dental implantology surgery, which is shown in Figure 13, is designed by Chosun University [40]. This manipulator with three degrees of freedom includes the insertion part and angulation part. The insertion part is used to adjust the insertion depth, and angulation part, which includes the translational stage and rotation stage, is used to adjust the insertion angle. Double parallelogram mechanism in the angulation part can improve the safety and reliability of implantology surgery. The related research about the kinematic and dynamic analysis and three-dimensional motion simulation using OpenGL and LabVIEW of this manipulator are studied.

Human-robot cooperative manipulator for dental implantology surgery.
Dental implant navigation system assisted by robot is constructed by Mahidol University and National Science and Technology Development Agency [41]. Tracking path generation of surgical instruments is established using optical tracking method by infrared surgical marker and stereo camera. The intraoperative system shows the position relationship between tracking path and surgical instruments and the relationship between the instrument's tool tip and the tracking path of CT and stereo camera image. The insertion position, angle, and depth can be calculated by homogenous transformation. Virtual experimentation is conducted. The testing is performed by controlling the instruments to track on the simulated path. The results show that the tool of the instrument and digitizer are on the track path on the screen.
An image-guided robotic system for automated dental implantation, which is shown in Figure 14, is constructed by Old Dominion University [42]. Patient-specific 3D models are reconstructed from preoperative Cone-beam CT images, and implantation planning is performed with these virtual models. A two-step registration procedure is applied to transform the preoperative plan of the implant insertion into intraoperative operations of the robot with the help of a Coordinate Measurement Machine (CMM). A CMM is introduced into our system acting as the reference coordinate system, to avoid direct contact between the robot and the patient during the setup stage, thus ensuring the safety of the patient. Phantom experiments show that the system design is feasible and provides a target registration error of 1.42 ± 0.70 mm.
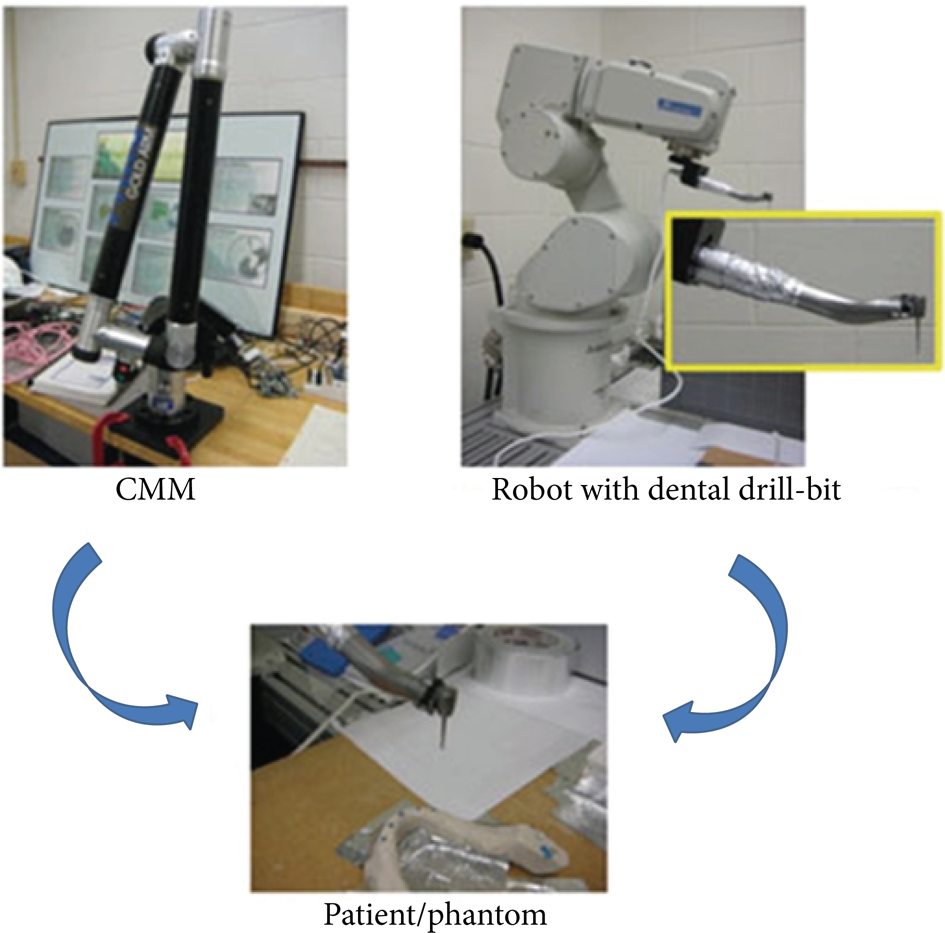
An image-guided robotic system for automated dental implantation constructed by Old Dominion University.
2.3. Orthodontics Archwire Bending Robot
A robotic bending apparatus for automatically bending orthodontic archwires into a particular shape, which is shown in Figure 15, is presented by Werner Butscher [43]. The bending apparatus is known as SureSmile archwire bending robot. The bending apparatus comprises a robot mounted to a base or table support surface. A first gripping tool has a structure for holding the archwire or other medical device and is either be fixed with respect to the base or may be incorporated into a moveable arm. The second gripping tool is mounted to the end of a moveable six-axis robot arm having a proximal portion also mounted to the base and a distal end that can move relative to the fixed gripping tool about three translational and three rotational axes. Preferably, the gripping tools incorporate force sensors which are used to determine overbends needed to get the desired final shape of the archwire and may also include a resistive heating system in which current flows through the wire while the wire is held in a bent condition to heat the wire and thereby retain the bent shape of the wire. SureSmile is an all-digital system which uses new 3-D imaging and computer techniques for diagnostics and treatment planning and uses robotics to customize fixed orthodontic appliances [44, 45]. Treatment can be simulated in advance and different treatment strategies can be visualized; this allows detailed treatment planning. The application of CAD/CAM aims at improving reproducibility, efficiency, and quality of orthodontic treatment.

SureSmile archwire bending robot.
A lingual archwire manufacturing and design aid (LAMDA) for the accurate, rapid design, and bending of the orthodontic archwire, which is shown in Figure 16, is established by Gilbert. This system can only realize the movement in XY plane. So it cannot bend the archwire with closed loop [46].
LAMDA system.
Archwire bending robot based on MOTOMAN UP6 is shown in Figure 17. The archwire bending robot is composed of PC, MOTOMAN UP6, and the archwire bending actuator. The actuator matches with the end of the MOTOMAN robot. The archwire bending actuator which connects with the MOTOMAN robot end is used to clamp and bend the archwire [47, 48]. Control software structure of archwire bending robot based on MOTOMAN UP6 is shown in Figure 18. The bending process, the bending point's position and angle optimization of the archwire, the kinematics of this robot, and bending properties of four type archwires are analyzed and simulated [49–55].

Archwire bending robot based on MOTOMAN UP6.

Control software structure of archwire bending robot based on MOTOMAN UP6.
Cartesian type archwire bending robot is shown in Figure 19. Archwire bending robot mechanism is composed of the base, the rotary, feed, and supporting structure of archwire, bending die, and archwire bending mechanism [56, 57]. Bending process orthodontic archwire is analyzed and structure of orthodontic archwire bending robot is designed using Solidworks software. Precision control with a third-order pure S acc/dec profile of archwire bending robot is established [58, 59]. Orthodontic archwire bending experimentation is performed using Cartesian type archwire bending robot. Figure 20 shows the orthodontic archwire made by the archwire bending robot system.
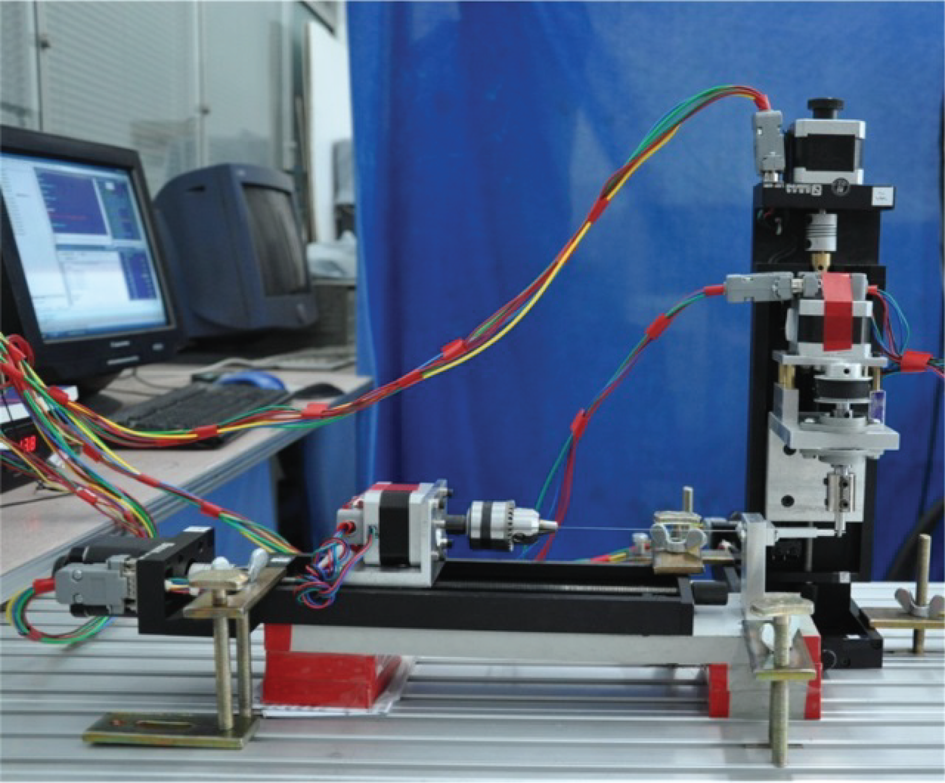
Cartesian type archwire bending robot.

Orthodontic archwire made by the Cartesian type archwire bending robot system.
3. Key Problems and Future Development on Application of Robot in Prosthodontics and Orthodontics
3.1. Key Problems on Application of Robot in Prosthodontics and Orthodontics
3.1.1. Basic Requirement of Design
Qualitative description language in prosthodontics and orthodontics is transferred to quantitative description. With the help of three-dimensional oral character, the manufacturing of complete or partial denture, dental implantology, and the bending of archwire are realized automatically by the limited space robot. Main difficulty of the design and manufacturing for robot in prosthodontics and orthodontics is whether it can satisfy the demand of the different patient's mouth characteristics after oral repair.
Basic design requirement of tooth-arrangement robot, dental implantology robot, and orthodontics archwire bending robot is as follows.
For tooth-arrangement robot, in virtual environment, qualitative description tooth-arrangement principle should be quantitatively expressed. Accurate grasping and sequential location of artificial teeth should be realized with fewer degrees of freedom.
For dental implantology robot, dental implantology robot should have the following functions: preoperation 3D reconstruction and path preplanning, real-time navigation of intraoperative image. The structure of the robot should realize the flexible adjustment of insertion angle and position in the limited workspace with help of image guidance.
For orthodontics archwire bending robot, orthodontics archwire should be quantitatively expressed. Archwire spring-back and bending point's planning should be analyzed to realize the accurate archwire bending.
3.1.2. Research Difficulty
Function of the application of robot in prosthodontics and orthodontics is different, so the research difficulty also is not identical.
Research difficulty of tooth-arrangement robot system is parameterized description oral character, such as jaw arch curve and dental arch curve, 3D reconstruction of complex shape artificial teeth, digital description, accurate grasping and location of artificial teeth, trajectory planning, and coordinated control of robot.
Research difficulty of dental implantology robot system is 3D reconstruction of preoperation oral cavity CT image, the registration between intraoperative navigation image and preoperative reconstruction image, structure design of robot in limited workspace, and trajectory planning of robot.
Research difficulty of orthodontics archwire bending robot system is spring-back analysis and bending algorithm of archwire and generation of personalized orthodontics archwire.
3.2. Future Development on Application of Robot in Prosthodontics and Orthodontics
Progress has been made in the research of the application of robot in prosthodontics and orthodontics, but it is not complete. Viewing from the state of the art of application of robot in prosthodontics and orthodontics and the market demand of oral cavity repair, the following research aspects should be done in the future.
(1) Novel Structure. High flexibility, reliability, and accuracy are needed for the robot in prosthodontics and orthodontics, but the workspace is limited by the oral cavity. The flexibility and the limited workspace are one pair of technical contradictions, so the total planning and optimization to the robot is necessary.
In the precondition of satisfying the oral cavity repair, the reducing of degree of freedom of the robot is necessary. Using the dual relation in structure and property of serial robot and parallel robot, requirements for the structural design of robot in prosthodontics and orthodontics are met by combining the high accuracy and simplified mechanical structure performance of parallel robot and the flexibility operation of serial robot.
(2) Sensor and Control Technique. For tooth-arrangement robot, it needs to grasp and manipulate accurately 14 complicated artificial teeth. So tooth-arrangement robot needs a lot of degrees of freedom and sensors. A highly efficient and coordinated control algorithm that is suitable for the tooth-arrangement by robot is very crucial. For dental implantology robot, the research in the future focuses on the registration between intraoperative navigation image and preoperative reconstruction image, real-time acquisition, and feedback of drilling depth and the implant force. For orthodontics archwire bending robot, the research in the future focuses on archwire spring-back and bending algorithm.
(3) Human-Computer Interaction Technology. Human-computer interaction technology is one of the key technologies of motion control of the robot in prosthodontics and orthodontics. For tooth-arrangement robot and dental implantology robot, the working environment is limited; there exist some illusions to the operators, such as the capturing and adjustment operation of the whole robot and the adjustment operation of drilling depth and posture. For orthodontics archwire bending robot, the research in the future focuses on three-dimensional virtual display of personalized orthodontics archwire on the screen, a virtual observation environment for a designed personalized orthodontics archwire, and the position's interactive modification of different loop. For the robot in prosthodontics and orthodontics, it is difficult to detect working condition and realize the operation with multiple obstacles unstructured environment. For facilitating the operation, a kind of friendly human-computer interaction software should be designed to provide humanization input and feedback for the operators.
4. Conclusion
Because of the advantage of standardization, industrialization, and intelligence of the robot in prosthodontics and orthodontics, it can accomplish the great revolution from qualitative to quantitative of prosthodontics and orthodontics, and it has been an important development direction of medical robot.
State of the art of application and research of robot in prosthodontics and orthodontics is introduced, and the basic requirements and research difficulties of robot in prosthodontics and orthodontics are pointed out; finally, the research of robot in prosthodontics and orthodontics in the future is expected from three aspects, such as new structure, sensor and control technique, and human-computer interaction technique.
In general, China takes the leading position in the research of application of robot to tooth-arrangement; some helpful explorations in the robot to tooth-arrangement theory of research and application have been taken by Harbin University of Science and Technology, Beijing Institute of Technology, and School of Stomatology, Peking University. Various countries in the world have taken helpful exploration in robot to dental implantology and orthodontics archwire bending, but it still remains at theoretical research and preliminary experiment level. With the development of correlation technique and theory, such as new structure, and sensor and control theory, the robot will be widely applied in prosthodontics and orthodontics.
Conflict of Interests
The authors report no conflict of interests. The authors alone are responsible for the content and writing of the paper.
Footnotes
Acknowledgments
The authors are extremely grateful to the anonymous referees for their most insightful and constructive comments, which have enabled them to improve the paper significantly. The authors are also grateful to the technical editor for reviewing and editing the paper. This research was supported by the National Natural Science Foundation of China (Grant no. 51205093), the Heilongjiang Province Education Bureau Project (Grant no. 12541147), and the National High Technology Research and Development Program of China (Grant no. 2013AA040803).