
Abstract
We have been developing a wireless sensor network system to support coral ecological system survey activities. This paper studies the required functions of a wireless sensor node for gathering information on underwater environmental conditions. For this purpose, a prototype sensor node is developed to clarify necessary functions through a practical experiment. In this paper, the hardware configuration of a latest prototype of wireless sensor node is described. The design of this prototype was based on our previous experiments and the comments of coral reef researchers. We conducted practical field experiments to observe the coral reefs along the Okinawa coast in Japan by using the prototype. Moreover, a browsing system of gathered information by the sensor network is described. Finally, we discuss the experimental results and the required functions of the sensor node for the future research.
1. Introduction
Coral reefs are a very important environment that maintains a great variety of life forms and also have important functions (e.g., an island formation and a tsunami prevention) for humans. However, by a coral bleaching on a massive scale caused by the impact of environmental change such as rapid rising of seawater temperatures and feeding damage by Acanthaster, there have been growing urgent and crucial concerns about the extinction of coral in recent years. The International Union for Conservation of Nature and Natural Resources has reported that a one-third overall of hermatypic corals are endangered species [1]. The coral reef ecological system that is easy to be affected by the environmental change is regarded as important as a biological indicator. Hence, conservation of coral reefs is attracting attention globally [2]. In Japan, the plans and studies such as Conserve Coral Reef Ecosystem [3] and Coral Reef Science [4] are proceeding. A preservation of coral reefs based on an analysis of an influence that an environmental condition change impacts the coral ecosystem becomes urgent need.
In the present situation, in order to preserve coral reefs, experts such as divers and researchers have been collecting data periodically on environmental conditions. However, these monitoring tasks are hampered by critical problems such as diving time limitations, decompression sickness, and accidents due to the hazardous environment. Therefore, we are developing an underwater monitoring system applying wireless sensor network technologies to support the monitoring tasks aimed at preserving the coral reef environment. A wireless sensor network, consisting of a large number of devices called sensor nodes (each with wireless communication functionality, various sensors, a processor, and a power source), is a network system that can communicate and use sensing data gathered mutually by each spatially distributed sensor node. To develop an underwater monitoring system using a sensor network technology, we have been designing and developing several prototypes of an underwater sensor node (USN) and confirming their functions experimentally [5, 6].
Various technical developments have been carried out in underwater monitoring sensor networks. For example, there are researches such as development of sensor nodes for underwater sensor networks [7, 8], wireless communication method including protocols and management [9–12], sensor node localization in acoustic sensor network [13, 14], and some applications of underwater sensor networks [15–19].
However, there are few systems that gather integrated information [20–23]. Our proposed system gathers underwater environmental information including images, water temperature, and GPS information. Especially we aim to develop a system which can be deployed to target area flexibly according to requests of users and can realize seamless spatial observation.
This paper describes our recent stationary USN mentioned later, which is developed based on knowledge obtained by previous experiments and coral researchers’ requirements. We conducted the practical field experiments using the prototype around coral reefs of Okinawa in Japan and the results were introduced. Moreover, a browsing system of gathered information by the sensor network is described. Finally, we discuss the experimental results and the required functions of the underwater monitoring sensor network for our future research.
2. Design and Development of Underwater Sensor Node
2.1. Concept of Underwater Monitoring Wireless Sensor Network
Figure 1 illustrates a concept of Underwater Monitoring Wireless Sensor Network (UMWSN). In this system, deployed stationary USNs in target area gather underwater environmental information in each required interval. The movable USNs collect data by approaching areas that the stationary USNs cannot monitor and by coming close to, or going around, observation targets or areas [24]. Gathered information is transmitted to a base station on a ship or a coast close to the target area via UMWSN. Coral reef researchers browse information via Internet and then conduct on-site verification of information and decide new research plans. This system provides the monitoring information of coral reef conditions on a remote site and a reduction of labor of field investigation of the researchers. Seamless spatial observation and data collection are realized by using the stationary USNs and movable USN collaboratively.
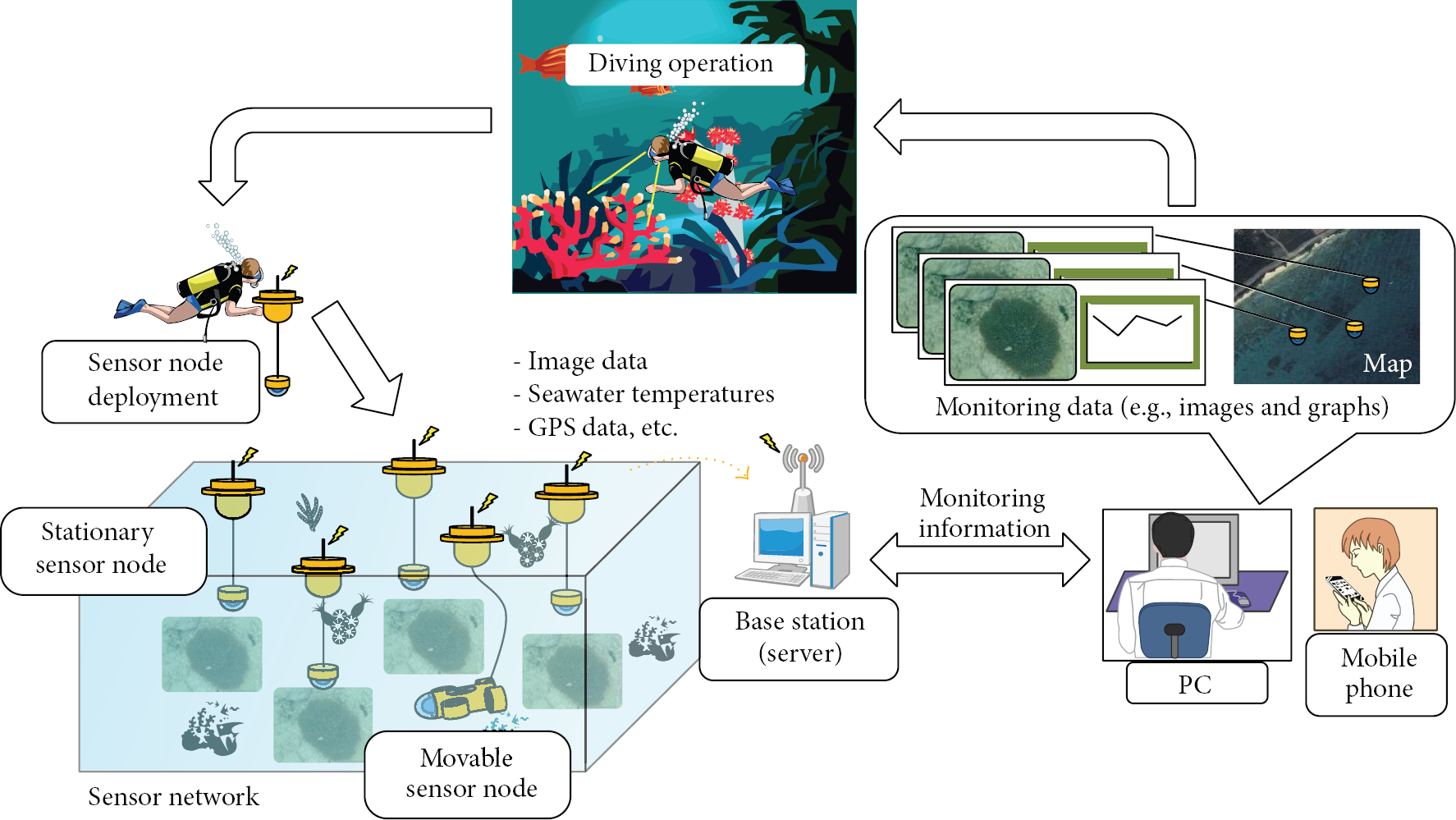
Conceptual sketch of underwater condition monitoring sensor network system.
We assume the following scenario for using the UMWSN.
Research ships carry USNs to a target area. Divers deploy USNs to the target area with necessary number of USNs and space interval according to requirements of investigation aims. Stationary USNs monitor underwater environmental information such as images and seawater temperatures by fixed-point observation and also measure own conditions such as posture and position. The movable USN approaches and monitors a target coral based on a monitoring plan or researchers’ request. Monitored information is gathered on the base station by a transmission via UMWSN and is released. Researchers access the base station via Internet and browse monitored information. And they also check conditions of the USNs for maintenance of the USNs as needed.
By using sensor network technologies, an adaptive monitoring for research objects is available because the system has temporal and special flexibility. Furthermore, it is expected that novel knowledge for biological and environmental studies that was not provided in conventional methods is acquired by seamless spatial observation and data collection.
2.2. Functional Requirements of Stationary Underwater Sensor Node
We interviewed researchers of coral molecular ecology and environmental engineering and divers who investigate coral reefs to develop the stationary USNs. From these information and sensor network's technical requirements, functions of the stationary USNs are studied.
Information Gathering Functions
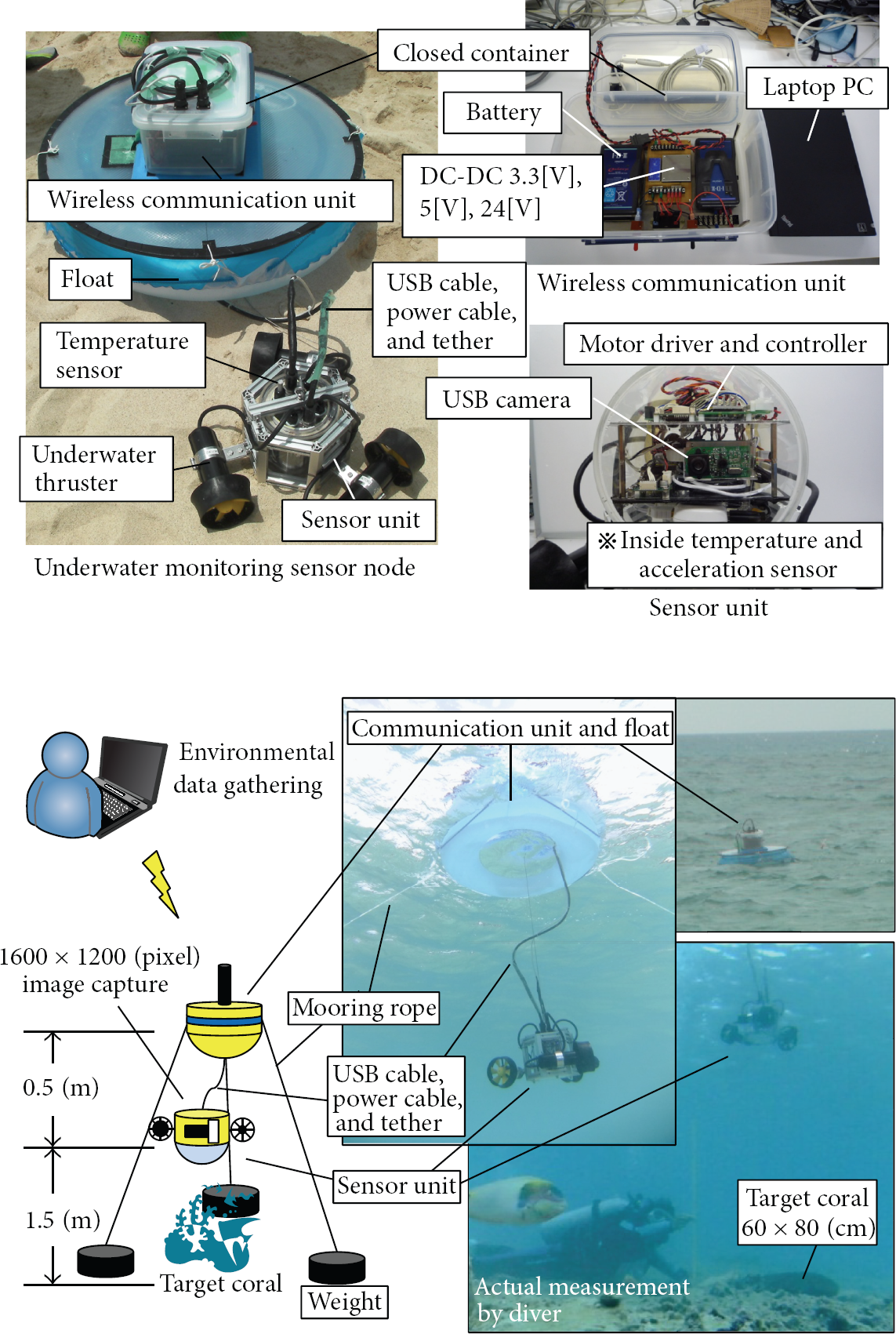
Image data is necessary to observe growth or bleaching state of coral or to detect signs of spawning of coral. The observation conditions vary according to investigation purposes. For example, a camera-to-target distance is about 0.5 m when near distance image is needed to observe spawning of coral. An overlook image depending on the depth of the water is also needed. A high image resolution can identify a characteristic of the coral state in detail. Therefore, it is necessary to determine suitable visibility and resolution of the image data according to investigation purposes. Seawater temperature is important for the underwater monitoring because coral reef bleaching is caused by rapid rising of seawater temperatures. Many reef-building corals inhabit the warm sea above 18 degrees Celsius. However, they live in narrow temperature range. It is estimated that coral reef bleaching occurs within temperature range from 29 to 32 degree Celsius. Therefore, a temperature sensor has to be suitable for the range of water temperature. GPS information is used for a localization of coral monitoring position. From our previous experiments [5, 6], 180 degrees slow yawing rotation and 0.4 m fluctuation were measured in the USN in depth of the sea of 2–8 m. Therefore, posture information of the USN using acceleration sensor is necessary for tracking a target coral.
Communication Function. Communication function is needed to construct the UMWSN. The number of USNs and spatial intervals of them depend on a coverage area by the UMWSN in a target area of investigation.
Self-Driving Function. Each USN needs self-driving function for the monitoring. The drive time is needed to take one still image per hour, day, and week for several weeks to a few months depending on investigation purposes.
Information Processing Function. A main controller is necessary for information processing and controlling the sensors and the functions.
Position and Posture Maintenance Functions. Position and posture maintenance function is important for target coral tracking.
Waterproof and Water Pressure Resistant Function. Waterproof and water pressure resistant function that resist water and water pressure to depth of the water 10 m that coral lives in is needed for the USN after installing all functions described above.
Moreover, in addition to the functions above, it is expected that the USNs are easily deployed and maintained. We will need to study necessary functions of stationary USNs through practical experiments because there are few systems such as monitoring integrated information and it is difficult to decide functions definitely.
2.3. Development of Stationary Underwater Sensor Node
We developed several types of stationary USNs: a suspending type (Figure 2) [5], a suspending type with underwater thruster (Figure 3) [6], and a fixing type (Figure 4).

Suspended type USN.
Suspended type USN with underwater thruster.

USN with fixing frame on the seabed.
Considering flexible deployment of USNs to target area, it is difficult to use wired communication. The system handles integrated information such as images, temperature, acceleration, and GPS information. To use an acoustic communication or low frequency wireless communication in the water is also difficult because of information capacity. Therefore, we separate the functions: communication and sensing. The prototype USN consists of two units: a floating wireless communication unit and an underwater sensor unit. In the suspending stationary USN, the floating communication unit is fixed by three ropes and three weights. The underwater sensor unit is hanged from the communication unit by the tether.
A latest prototype stationary USN shown in Figure 4 was designed in the same concept of other prototypes and developed based on our previous experiments and the feedback of coral reef researchers.
The floating wireless communication unit is equipped with a watertight acrylic case with a float (weight capacity 69 kg) for waterproofing and an embedded computer (Atmark Techno, Inc. Armadillo-9) with a wireless LAN adaptor (Logitec LAN-MBW300/PS) and an extension antenna. A GPS sensor (Core Corporation CL641-030B) and lithium-ion rechargeable mobile batteries are also included.
IEEE802.11b is used for the communication protocol. The ad hoc routing protocol, olsrd [25], is installed in the embedded computer to set communication functions easily in deployment of stationary USNs.
The underwater sensor unit is equipped with a USB camera (Logicool C920) for observation of corals, a USB temperature sensor (Strawberry Linux Co., Ltd. USBRH) for underwater temperature measurement, and a USB acceleration sensor (Vitec Co. Ltd. TDS01V) for detection of the sensor unit posture. The underwater sensor unit is also equipped with an embedded (Atmark Techno, Inc. Armadillo-9) computer and mobile battery. These devices are contained in a watertight acrylic case. Figure 5 shows the hardware configuration in detail.
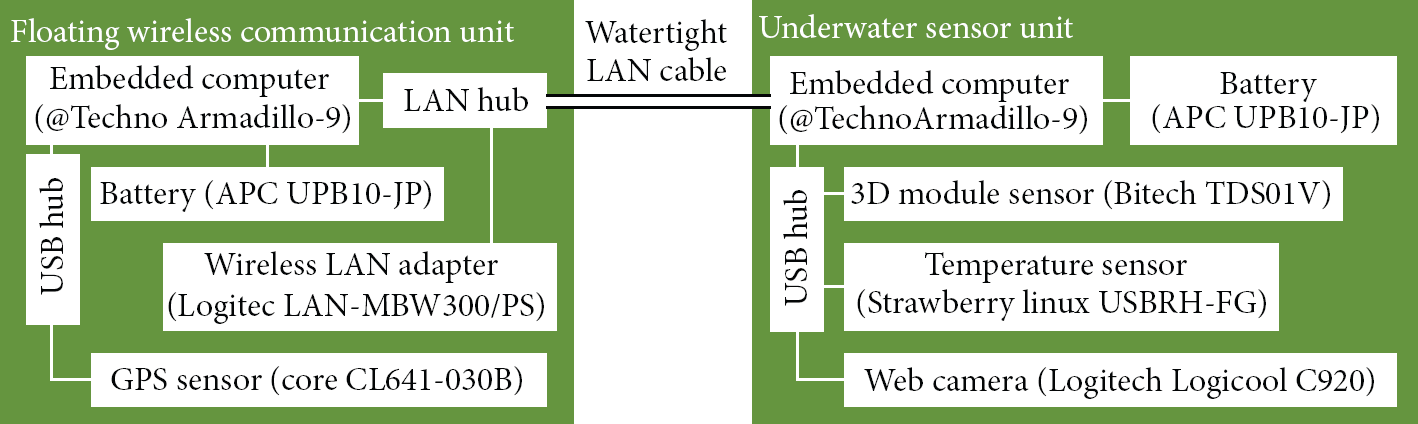
Hardware configurations of fixed type USN.
The underwater sensor unit is connected to the floating wireless communication unit with a watertight LAN cable and sends sensor information to the floating wireless communication unit. Fixing stand for fixing the underwater sensor unit to the seabed is also developed and installed based on advices of coral researchers against a sensor unit fluctuation. This fixing stand is used in the cases that a target coral colony is small and the stand does not injure coral in installation.
Figure 6 shows the flow of the software in the system. The underwater sensor unit captures an image and acquires seawater temperature and acceleration data for each sampling time and sends these data to the floating communication unit. Moreover, same data are saved on own storage. The floating communication unit adds the GPS information to the data sent from the underwater communication unit and sends these data to the base station. Same data are also saved on own storage. The base station saves all USNs’ data. The sensor information is saved with the format shown in Figure 7. These processes are run on Debian GNU/Linux. Each unit and the base station can transmit and receive information by using socket communication. The name of files and images in Figure 7 mean year (yyyy), month (mm), date (dd), hour (hh), minute (mm), and second (ss). It shows a getting time of information. In this system, sensor information is sent to the base station at required interval and always backed up locally against a disconnection of the communication.
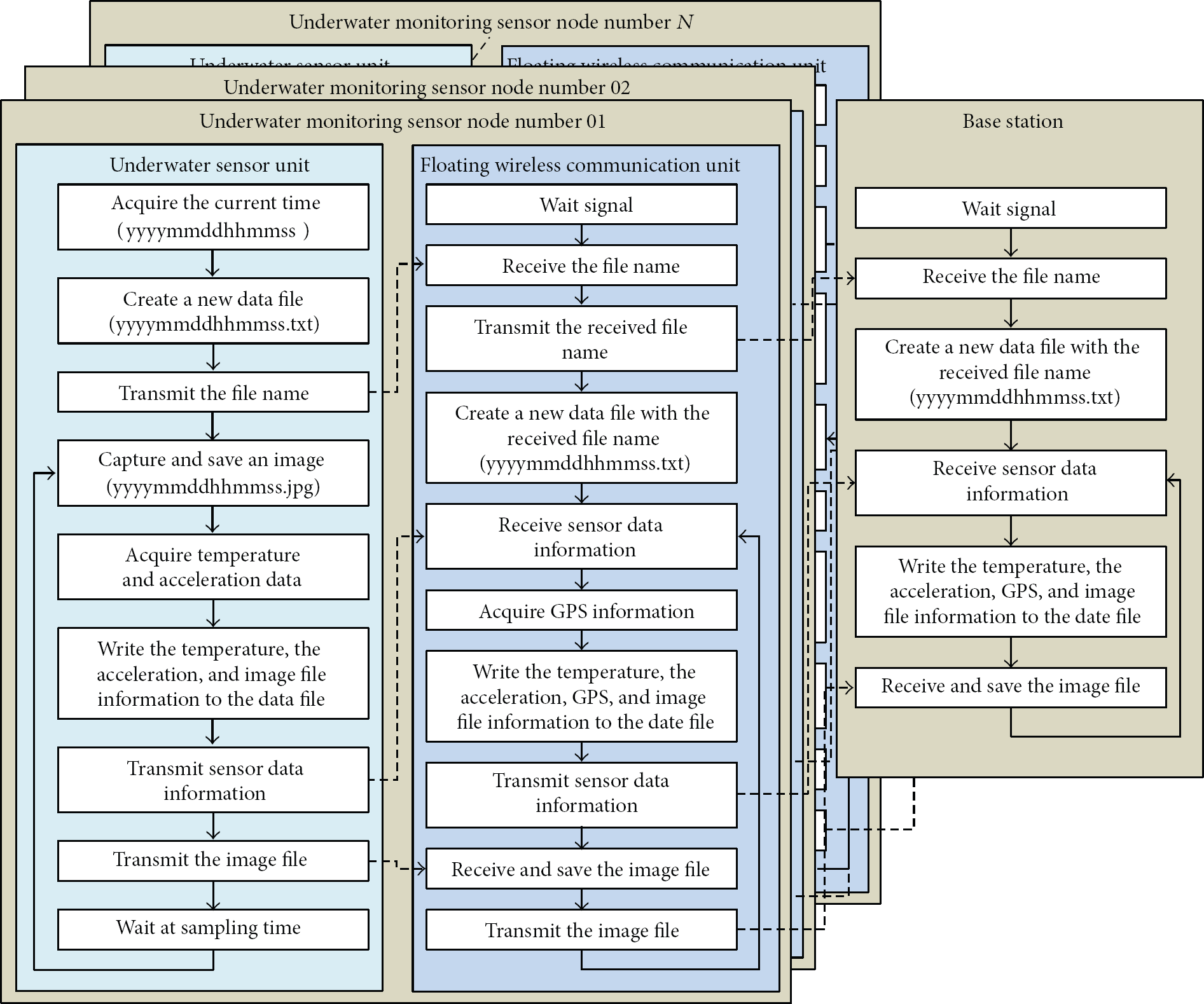
Flow of the software.

Format of gathering information.
In the use of the current UMWSN, we assume three stationary USNs and a movable USN are deployed for one base station to maintain at least 1.0 Mbps of throughput for end-to-end communication considering continuous image data transmission. Then, the maximum covered area by communication is approximately 160 m in a straight line based on the result that one hop communication distance is 40 m in our experiment using the current system. However, communication conditions are changed by environmental conditions. A throughput measurement is needed to maintain communication performance between USNs while deploying USNs to required locations. For 4-hop communication, a 7.0 Mbps throughput must be maintained between each SN to guarantee a 1.0 Mbps throughput for end-to-end communication. However, an autofallback system has been installed in the IEEE 802.11b standard that adjusts throughput automatically in response to changes of RSSI value. This system adjusts the upper limit of the throughput to less than 7.0 Mbps when the RSSI value falls below −86 dBm. Therefore, both the throughput and RSSI values must be sustained to ensure the required communication performance. We consider that the stationary USNs are deployed based on locations and distribution of target coral reefs and maintaining communication performance. When communication link is disconnected, we also assume the movable USN relays communication or puts the stationary USN again. Two or more base stations and USNs are used for observation of wide area.
3. Practical Field Experiments in Okinawa in Japan
We conducted practical field experiments to observe a colony of reef-building coral along the Okinawa coast in Japan by using the prototypes.
Figure 8 shows the experimental situation and sample of captured images by using the suspending type stationary USN with underwater thruster on September 2, 2011. The target coral lives at a depth of approximately 2 m and the colony size is

Example of previous experimental situation.
Figure 9 shows sample of the captured images of another coral by using the fixing type stationary USN on January 14, 2013. The target coral lives at a depth of approximately 2.5 m and the colony size is

Examples of captured image by sensor node.
4. UMWSN Information Browser
Sensor information acquired by USNs is transmitted to and gathered in the base station (Server). The base station serves as the Web server. The users such as coral researchers can access monitoring information by using a Web browser (Figure 10).

UMWSN information browsing system via Internet.
Figure 11 shows the example of Web page. This page displays monitored information (graphs of seawater temperature and captured images) that was monitored by each stationary USN. Seawater temperatures are graphed by using amCharts [26]. Latest captured images in the server are checked automatically and displayed on the Web page. The Web page can display the temperature and image information of a period required by the user. The coral conditions are recognized by judging a threshold of HSV level of the image. Each USN's condition can be checked by selecting USN's ID.

Example of Web page for USN information browsing.
5. Discussion and Future Work
This paper described our stationary USNs for the development of the UMWSN with showing the observation possibility of the coral. However, it is difficult to apply this prototype system to long-term and robust monitoring task in underwater environment. Therefore, we are now developing several component technologies for USN based on the findings obtained from our studies.
Currently, the operating time of the USNs is short with several hours although the USN can be self-driving by the battery. We have to consider an intermittent operation, a periodical battery exchange, combination use of a solar power generation, and so on for long-term operation. Furthermore, the method for photographing at night must be discussed. We have to consider a correcting method such as a cooperative information correction among the USNs for GPS sensor information, because a localization error occurs. The watertight acrylic case is usable to depth of the water 10 m. It is necessary to confirm the durability of the watertight case in the case that the case is placed in underwater environment for a long time. A deployment method and long-term observation method by using the UMWSN will have to be discussed to use the UMWSN. Furthermore, processing of the observation information from many USNs is needed. In current situation, we only explore and evaluate the functional performance of the stationary USN. After that we must measure and collect various qualitative monitoring data such as water quality, transparency of seawater, and other detailed environmental information for coral reef observation.
We conduct practical field experiments with changing experimental conditions to clarify the observation conditions corresponding to the investigation purpose.
6. Conclusion
In this paper, we proposed the UMWSN to support the observational activities for preserving the coral reef environment. Design and development of the prototype stationary USN was described. We conducted practical field experiments to observe a colony of coral reefs along the Okinawa coast by using the prototype. Then, we verified that the basic functions of the USN were performed on the practical environment, and the captured images were useful for observation of the coral from feedback given by researchers on coral ecology and environmental engineering and underwater monitoring expert divers. We developed information browsing system via Internet.
We are developing the UMWSN continuously with researchers of the coral molecular biology and the environmental engineering to clarify and confirm the functions of the USN in detail. We will observe the coral reef ecosystem with developing these component technologies described in Section 5.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was partially supported by the Research Institute for Science and Technology of Tokyo Denki University, Japan (Grant no. Q11-05) and was also supported by a Grant-in-Aid for Scientific Research (B) from the Ministry of Education, Culture, Sports, Science, and Technology (MEXT), Japan (KAKENHI, 23300074, and 24500244). The authors are grateful to Professor Ken Shimojima, Mr. Eisuke Kuraya, and Mr. Kenta Watanabe who are researchers and engineers in Okinawa National College of Technology for their support in the experiment in Okinawa.