
Abstract
When a driving voltage opposite to the piezoelectric polarity is applied on the flextensional stator, it will generate the normal force, of which the operating voltage range of piezoelectric actuators will decrease. This paper presents a novel stator design for producing the normal force in which the driving voltage has the same piezoelectric polarity, which is based on the structure of two multilayer piezoelectric actuators clamped in a star-shaped shell. To obtain the two close resonance frequencies of flexural and translation modes, a genetic algorithm combined with the finite element analysis is employed to find the optimal dimensions for the geometry of the stator. The importance of each design parameter is evaluated through a proposed sensitivity analysis method. A prototype resulting from the optimal design was fabricated and the experimental results are given to show that the stator can generate, in practice, the required coupling resonance mode between 35.15 kHz and 36.49 kHz.
1. Introduction
Ultrasonic motors (USMs) have been developed for various applications in the precision positioning control such as camera lens focusing devices. Similar to the electric motor, a USM mainly consists of a stator and a rotor, where the stator should be designed to generate vibrations by piezoelectric actuators such that the electric energy can be effectively converted into the mechanical power. USMs are developed into different types according to different driven principles such as standing waves, traveling waves, and multimode [1]. Multimode USMs use a combination of vibration modes to produce elliptic motion on the contact surface to drive the rotor via friction. Many stator designs have been developed as in [2–5]. The stator with two multilayer piezoelectric actuators (MPAs) clamped in an external shell was developed to overcome the tensile stress limit and also to amplify the vibration [6]. Such a stator works with simultaneously exciting flexural and translation vibration modes. Some researches based on the so-called flextensional stator have been studied in the past decade. For example, Brussel et al. developed a flextensional USM which has stepping mode and resonance mode [7]; Ho proposed the dynamic model of the flextensional USM [8]; Bouchilloux and Uchino designed a flextensional stator using the genetic algorithm [9]. Since the design of the flextensional stator appears with multivariables, the importance of each designed variable is evaluated through the sensitivity analysis proposed in this paper.
It is known that the flextensional USMs are operated by the friction between the stator and the rotor. The friction force is derived from the normal force which stems from the preload and the normal deformation of the flextensional stator under the flexural mode [8]. To generate the normal deformation of the flextensional stator, the driving voltage of the MPA is generally applied with the opposite polarity to produce a compression deformation. However, corresponding to the work of [11], the operating voltage with opposite polarity should be lower, which is limited to 20% of the maximum operating voltage with the same polarity in general. In order to increase the input voltage for raising the output performance of MPAs, a star-shaped flextensional stator is proposed in this study such that the flextensional stator can properly create a normal deformation under the MPAs elongation.
This paper is organized as follows. In Section 2, the design perspective is introduced particularly. In Section 3, the dimensions of the star-shaped flextensional stator are obtained by utilizing finite element analysis (FEA) and the genetic algorithm (GA). In Section 4, the importance of each designed variable is evaluated by using Taguchi sensitivity analysis. Lastly, in Section 5, the prototype of a star-shaped flextensional stator is fabricated to verify the feasibility of the proposed optimal design method.
2. Design Perspective
Consider the structure of the flextensional USM shown in Figure 1, where the stator consists of two MPAs clamped in an elliptical shell. Let the fundamental translation and flexural vibration modes be designed to be coupled together such that an elliptic motion can be generated on the stator surface to drive the rotor for the movement. To analyze the driving force on the rotor, the translation and flexural vibration modes should be individually separated, as shown in Figure 2. The normal force is produced by compression deformation of the two MPAs, and the thrust force is the product of the normal force and the friction coefficient between stator and rotor.

Flextensional type scheme of USM [10].

(a) Flexural mode of flextensional stator. (b) Translation mode of flextensional stator.
In this paper, a star-shaped flextensional stator is proposed, as shown in Figure 3. The stator can produce the normal deformation of the shell, which is induced by the extension of the MPAs as shown in Figure 4. Therefore, the driving voltage can be controlled toward the polarity of MPAs to improve the operation limitation of the flextensional ultrasonic motor referred from [11].

Star-shaped flextensional stator.

Star-shaped flextensional stator under flexural mode.
3. Design of Star-Shaped Flextensional Stator
The design of the star-shaped stator for using in the ultrasonic motor should consider the following two criteria.
The star-shaped flextensional stator is able to produce the coupling of two resonance modes; thus, the resonance frequencies of the flexural and translation modes (f f and f t ) should be as close as possible.
Both resonance frequencies must be designed over the ultrasonic frequency f u (20 kHz) to implement silent USM operation.
Since the resonance frequencies are significantly affected by the structural geometry, the proposed optimal design process aims to obtain an appropriate geometric shape of the stator under the mentioned two design criteria. The design of a star-shaped stator considered in this paper consists of four parts as shown in Figure 5, where commercial available MPAs (e.g., Piezomechbanik Co., PSt 150/5×5/7) are adopted, and a steel fixture is used as a hard base. For the wear reduction of the stator, the regular triangular 3 mm edge steel tip (width: 5 mm) is glued on the shell. For achieving resonance frequencies (f f and f t ) of the stator over the ultrasonic frequency and maintaining the enough structural stiffness, the aluminum shell is employed. The parameters of the shell are shown in Figure 5, that is, the lengths (L1, L2, and L3), the included angles (θ1, θ2), and the thickness (t) of the shell.
Design parameters of star-shaped flextensional stator.
In order to compute the resonance frequencies (f f and f t ) of the stators of different designs, the finite element analysis (FEA) is employed in this study. The material properties of the stator for the FEA simulation using ANSYS are listed in Table 1, and the equivalent material parameters of the MPA were adopted [12].
Material properties of star-shaped stator.

To design the appropriate stator, an objective function is defined in (1), which consists of the frequency difference and a penalty function. The penalty function is adopted in the objective function to ensure the resonance frequencies of the flexural mode f f and translation mode f t are higher than the ultrasonic frequency f u , and furthermore f f and f t become closer as the objective function value decreases. Consider

Owing to nondifferentiable objective function, the optimization method genetic algorithm (GA) is adopted in this paper. It is known that the GA approach can be employed to solve the global optimization problem when the objective function is discontinuous or nondifferentiable. For example, the GA has been extensively applied to the field of USM [4, 9, 13]. In this study, the GA is implemented by MATLAB, and the flowchart of the optimization process is shown in Figure 6. The GA parameters and the constrained conditions are listed in Table 2, and the obtained results are given in Table 3.
GA parameters and constrained conditions.
Optimization results.


Flowchart of GA optimization process.
Figure 7 shows the flexural and translation modes of stator based on the optimization process. Therefore, the stator structure can generate the coupling resonance mode while its operating frequency is between f f and f t .

(a) Flexural mode of star-shaped stator. (b) Translation mode of star-shaped stator.
4. Taguchi Sensitivity Analysis
The performance of a system is often affected by the process error, and sensitivity analysis is helpful to determine the relative importance of design parameters on the system performance. In the practical implementation of designed product, it is important to find the parameters mostly affecting the design performance and to understand the degree of impact of the parameters. In this study, Taguchi methodology is adopted. The signal-to-noise ratio (SNR) test and the analysis of variance (ANOVA) are carried out to evaluate the most important parameters. Taguchi method is to use SNR as the quality characteristics for the choice of parameters. For the-smaller-the-better characteristic, SNR can be expressed as

where n is the number of experiments and y is the simulation data. In this case regarding stator design, the flexural mode and the translation mode should be approximate to each other; hence, y can be defined as follows:

In order to know the influence of design parameters, the structural dimensions are slightly varied from the GA optimization solution, as shown in Table 4. Six parameters with five respective levels are considered in this study. Notice that Level 3 is the result retrieved from the GA optimization process. A standard Taguchi L25(56) orthogonal array is adopted to study the sensitivity analysis. The frequency difference between the flexural and translation modes is obtained from the ANSYS simulations, and their corresponding values of SNR are listed in Table 5. The response table for SNR is shown in Table 6, and the response data is subjected to ANOVA for finding the significant parameters. In the ANOVA process, the F-test value at the 90% confidence level is calculated to decide the significant parameters, as shown in Table 7. It should be noted that the influence of L2 on the variation of system performance is very small; thus, it is pooled out of ANOVA. Furthermore, Table 7 shows that θ1 and t are statistically significant at the 90% confidence level. This implies that θ1 and t dominate the variation of system performance greatly. Therefore, in practical implementation, the designed star-shaped flextensional stator should be given with more attention regarding the manufacturing accuracy θ1 and t.
Design variables and levels.

Simulation data and SNR.

Responses for SNR.

Results of ANOVA.

SS: sum of squares; DOF: degree of freedom; V: variance; and significant at 90% confidence level.
5. Experimental Results
Based on the obtained geometrical parameters from the optimization in Table 3, a star-shaped flextensional stator prototype is fabricated in order to validate the feasibility of the proposed design, as shown in Figure 8.

Star-shaped flextensional stator prototype.
In order to obtain the resonance frequencies of the designed stator, an impedance analyzer (Wayne Kerr 6520A) is used to measure the impedance characteristics of the prototype, and the measurement plot of electric impedance within the measured frequencies is shown in Figure 9. The minimum impedance frequencies of the flexural mode and translation mode are 36.49 kHz and 35.15 kHz, respectively. Compared to the previous simulated result, the simulation of the flexural mode and translation mode yielded 2.4% and 5.6% error, respectively, which highly agree with the predicted performances of the star-shaped flextensional stator.
Impedance characteristics of prototype with respect to frequency.
As can be seen from this prototype, the normal deformation of the stator must be generated by the extension of two MPAs in flexural mode. In order to validate this phenomenon, two laser Doppler interferometers (Graphtec AT0023 & AT3700) are employed with the orthogonal arrangement to measure the vibration characteristics on the prototype stator surface along with both the vertical and horizontal directions, as shown in Figure 10. Figure 11 shows the vibration measurement while two input voltages (36.49 kHz, 10 Vpp) applied to the MPAs are in the same phase. It can be found that no phase difference occurred on the vertical and horizontal vibrations in Figure 11. Therefore, the flexural mode can be observed such that the normal deformation can be induced by the extension of two MPAs.
Experiment setup in flexural mode.

Vibration measurement result in flexural mode.
As the USM stator, an elliptic motion on the tip is produced in this prototype by exciting flexural and translational modes simultaneously. In order to confirm the generation of elliptic motion, the vibration on the stator tip is measured as in Figure 12. The prototype can be operated between 36.49 kHz and 35.15 kHz; thus, the operating frequency 35.82 kHz is chosen in this study. Figure 13 shows the elliptic motion on the surface of the proposed stator under different operating voltages. It can be found that the enclosed area of the elliptic trajectory is obviously increased by raising the operating voltage toward the polarity of MPA; thus the performance of USM can also be increased [14]. Finally, a prototype of a USM consisted with the star-shaped stator and the rotor was implemented as shown in Figure 14, and its measured performance is shown in Figure 15. From the measured result, raising the positive operating voltage can increase the performance of USM for which the maximum speed and torque are about 41 RPM and 60 m-Nm, respectively, observed in Figure 15.

Experiment setup of motion trajectory on stator tip.

Elliptic motion trajectory of proposed stator.
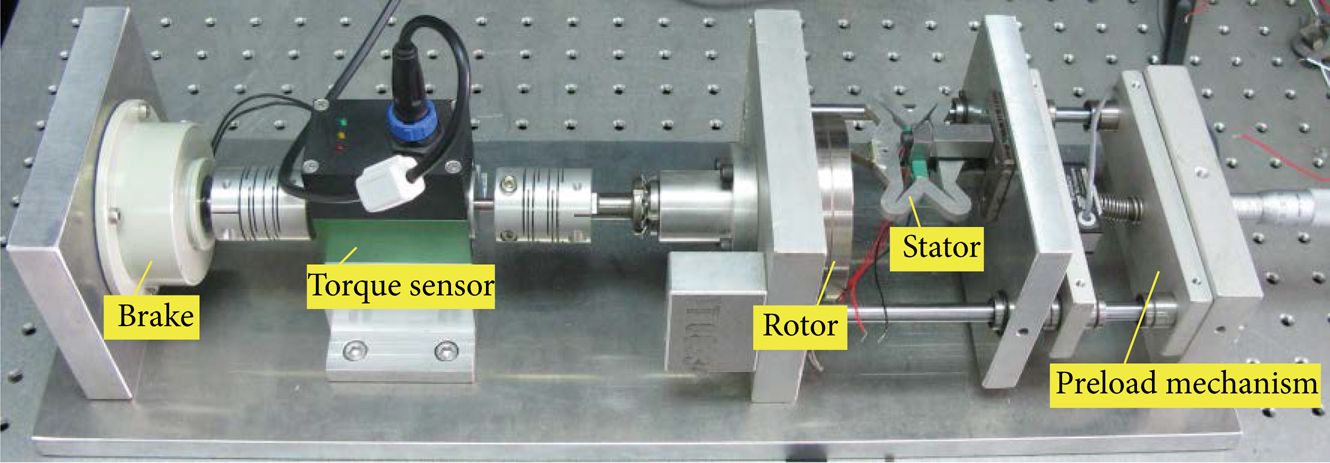
USM using star-shaped stator.

Load characteristics.
6. Conclusions
In this paper, a star-shaped flextensional stator which can produce the normal force under operating voltage with the same polarity was proposed. The appropriate structural dimensions of the stator are obtained by GA optimization. The sensitivity analysis of using ANOVA has shown that parameters θ1 and t have the most significant influences on the variation of system performance in this design example. A prototype of the designed star-shaped flextensional stator was fabricated and the experimental results demonstrate that the stator can actually produce the flexural mode at 36.49 kHz and the translation mode at 35.15 kHz, and elliptic motion trajectory can be generated by exciting the two modes simultaneously. The vibration measurement of the flexural mode has confirmed that this stator can produce the normal deformation by the extension of two MPAs.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work is financially supported by National Science Council of Taiwan under Grant no. NSC 102-2221-E-006-001. The authors would like to thank the anonymous reviewers for their helpful comments and suggestions to improve the quality of the paper.