
Abstract
Current advancements in vehicular networking lead to amplifying the issue of spectrum scarcity. Cognitive radio (CR) has emerged as the key technology that enables flexible, efficient, and reliable spectrum exploiting by unlicensed networks to use licensed spectrum bands in an opportunistic manner to alleviate the spectrum scarcity issue. We have already proposed vehicular ad hoc and sensor networks (VASNET) as a new networking paradigm for vehicular communication by utilizing wireless sensor nodes in two mobile and stationary modes. The nodes are employed to sense vehicles' activity, for example, car crashes. Like other unlicensed networks, VASNET is supposed to operate over unlicensed spectrum bands. However, due to emergency nature of accident alarms in VASNET that must be received in minimum period of time and avoiding packet loss, in this paper we investigate CR-based VASNET, named as CR-VASNET. Various challenges and issues are discussed in details. In order to save stationary nodes' power and enlarge the network lifetime, an optimization technique for relay node selection is proposed. Furthermore, for primary users (PU) protection, an energy detection-based scheme is suggested to calculate the probability of PU arrival. Our theoretical discussions and simulation results proved the efficient functionality of the proposed CR-VASNET as a promising vehicular networking paradigm.
1. Introduction
Wireless sensor networks (WSNs) are recently used in many civilian application areas including environment and habitat monitoring, healthcare applications, home automation, and vehicular traffic control [1]. As an application of WSN, vehicular networks received plenty of studies in the recent years. In [2] we have proposed a new networking paradigm for vehicular networks by employing wireless sensor nodes in an ad hoc topology. We entitled the proposed paradigm as vehicular ad hoc and sensor networks (VASNET). VASNET is a self-organizing ad hoc network comprised of a large number of sensor nodes. In VASNET there are two kinds of sensor node, some are embedded on the vehicles, called as vehicular nodes (VNs) and others are road side sensor (RSS), deployed at predetermined distances besides the highway road wherever communicating between VNs and infrastructure units is not possible. The VNs are used to sense the vehicle activity, accident detection for instance. We can have some base stations (BS) such as Police Traffic Station, Firefighting Group, or Rescue Team.
In case of accident, the VNs estimate the accident severity by fusing the sensors readings, for example, collision, the jerk, inclination degree, and temperature. Then, the defuzzified result of the fused data as a decision making alarm will be routed to the BSs via RSSs. VASNET provides the capability of wireless communication between VNs and RSSs and increases safety, comfort, and information agility for vehicles on the highway roads.
VASNET as an application of WSNs is supposed to employ a fixed spectrum band allocation such as dedicated short-range communication band (75 MHz spectrum allocated in 5.9 GHz band), unlicensed band, for example, 2.4 GHz industry, science, and medicine (ISM) band, or a wideband using overlay techniques like ultrawideband (UWB) signaling. Due to increasing demands for wireless communications, efficient spectrum utilization comes into the picture. To address this challenge, cognitive radio has emerged as a key technology, which enables VASNET to access both licensed and license-exempt spectrum bands (i.e., TV unused spectrum channels) in an opportunistic manner. The CR and VASNET share distinct similarity in the way they operate; sensing operations are carried out to collect information from the operating environment and respond accordingly. We call our proposed system as cognitive radio-based vehicular ad hoc and sensor networks (CR-VASNET). Our objective is to provide a clear picture of potential of CR-VASNET, the current state-of-the-art, the research challenges on this exciting topic, and propose practical methods to alleviate the issues.
Regarding the report of the authors in [3], around 70% or more of TV bands are unused in small cities and rural areas. Thus, the proposed CR-VASNET is particularly applicable for highway roads since most portions of a highway are in rural areas, where the spectrum band is quite clean and CR-VASNET is able to find significant unused spectrum channels. Furthermore, it is expected that the percentage is higher for highways passing through areas where few people live. Thus, in this paper, we focus on CR-VASNET utilizing TV white spaces on the highway roads in an opportunistic manner without harmful interference to the incumbents.
CR-VASNET composed of sensor nodes equipped with CR may gain benefit of the (1) dynamic spectrum access: the existing vehicular networks, for example, VANET deployments, supposed fixed spectrum allocation over very crowded license-exempt bands (ISM, for example). Unlicensed bands are used by many secondary users (SUs) such as IEEE802.11 hotspots, PDAs, and Bluetooth devices. However, VASNET must either operate over license-exempt bands or a spectrum lease for licensed band must be acquired. But, a spectrum lease for a licensed band increases the overall implementation cost. Therefore, for efficiency cooperation with other types of users, opportunistic spectrum access to the TV spectrum bands may be exploited in VASNET. (2) Access to multiple channels to adapt to various spectrum regulations: since the location is an important factor in TV bands availability and also with respect to this subject that regulation rules are different from region to region, thus, a particular spectrum band available in a region may not be available in adjacent regions. Since CR armed nodes are able to change their communication frequency, they would overcome the spectrum availability challenge as well. (3) Opportunistic channel access in case of dense traffic: upon the detection of an event, a large number of sensor nodes generate a dense traffic to send their readings to the base station. Collision, packet losses, downfall communication reliability, and high power consumption are the consequences of burst traffic. These abhorrent issues can be alleviated by opportunistic access to multiple alternative channels. (4) Optimum power consumption using adaptability: retransmissions and packet loss increase the power consumption in wireless networks due to their dynamic nature. CR equipped sensor nodes are able to adapt to varying channel conditions which result in optimum power consumption and efficient transmission.
Consequently, we define CR-VASNET as a distributed network of wireless CR sensor nodes—mobile and stationary—which sense the vehicles' activities and collaboratively communicate their readings dynamically over available TV spectrum bands (TVWS) in multihop manner toward the base stations to satisfy application-specific necessities. CR-VASNET in vehicle-to-vehicle and vehicle-to-RSS nodes communication and even among vehicles' onboard diverse sensors will help improve energy efficiency, radio resource, traffic network management, accident incident avoidance and report, and so forth, by highway traffic awareness and route planning.
While the mentioned potential privileges and CR-VASNET definition introduce it as a promising paradigm for vehicular networks, the realization of CR-VASNET depends on addressing many serious issues, posed by the unique characteristics of WSNs, VANETs, and CRNs and further amplified by their union. Among many others, data fusion, localization of VNs, routing, inherent resource constraints of RSSs such as power and processing constraints, additional communication and processing demand imposed by CR capability, design of low cost and power-efficient CR sensor nodes, efficient opportunistic spectrum access, multihop, and collaborative communication over licensed and license-exempt spectrum bands are primary challenges to design and have real implementation of CR-VASNET. In this paper we delve some of the challenges and discuss them in details such as network architecture, node structure, spectrum management (spectrum sensing, spectrum analysis, spectrum decision, and spectrum mobility), and communication architecture. In order to reduce the number transmission and enlarge the network lifetime, we suggest a method to optimize the relay node selection. Furthermore, to overcome the most important issue of licensed channel access, an energy detection-based technique is suggested to protect the PUs.
The organization of the paper is as follows: we review the related works in Section 2. CR-VASNET architecture and relay node selection optimization scheme are discussed in Section 3. The structure of the nodes is explained in Section 4. In Section 5, the issues and challenges regarding dynamic spectrum management are discussed. The communication architecture is explained in Section 6. In Section 7, we present the simulation results. And finally, Section 8 concludes the paper.
2. Related Works
CR-VASNET inherits its challenges from three networking paradigms including cognitive radio networks (CRN), vehicular ad hoc networks (VANET), WSNs, and further union of them. CR technology as a promising solution for tackling the issue of spectrum scarcity received plenty of research works in recent years [4]. Existing research studies on CR focus on different problems including investigation techniques for spectrum management [5], MAC protocols [6], and routing [7]. Vehicular networking is prone to get benefit from CR technologies such as dynamic spectrum access [8–12]. The authors in [11] have presented a channel access management system to support QoS for data transmission in CR vehicular networks. They have formulated the channel selection problem as a constrained Markov decision process (CMDP) model, where the PU traffic is slotted and the considered constraints include maximum probability of collision with the licensed users, maximum packet loss probability, and maximum packet delay for mobile nodes. Two types of channel, for example, shared-use and exclusive-use channels, were used for data transmission among vehicles. Hence, a CMDP for exclusive-use channel reservation and clustering control form a hierarchical MDP model. However, the proposed method is based on clustering scenario which causes large overhead; hence, it is not a noteworthy solution for vehicular networks according to their unstable topology.
In order to effectively minimize the cost of operation and ensure the resulting error in spectrum detection within the bounds, a framework for the placement of BSs, given the various capabilities of querying, geolocation, and local sensing capabilities that vehicles may be equipped with, has been proposed in [13]. The framework uses spectrum database as well as support from infrastructure. The guidelines for the uniform placement of stationary nodes have been provided in order to generate information about the availability of white spaces and thereby support the vehicular nodes. Although utilizing centralized approaches can effectively improve the reliability by improving data delivery, the centralized approach is not appropriate to support multihope communication. A machine-to-machine communication paradigm by utilizing CR technology coined as cognitive M2M and a coordination based energy-efficient spectrum detection protocol have been suggested in [14]. The main objective of the proposed paradigm is to enhance the flexibility, efficiency, and reliability of M2M communication, with the potential of CM2M for the smart grid in variant networks being presented. However, the authors did not thoroughly investigate the properties of large networks together with architecture designs and thus might overestimate the performance of M2M networks due to simplified assumptions.
Ghandour et al. in [15] proposed a system (named DCV) that provides data delivery guarantees using CRNs principles in congested VANETs. In fact, DCV detects data contention region in the network and if the contention delay exceeds the predetermined threshold, a central administration entity extends incrementally the spectrum allocated for the control channel using CRNs principles. Assuring of generation and transmission of data packets during the same interval of time were the main intention of the proposed system. The authors in [16] described a multiserver multipriority queuing model for the analysis of feasibility of vehicular dynamic spectrum access in TV white spaces. They resorted to CR technologies and studied the feasibility of dynamic spectrum access schemes that tapped into TV white spaces, and in an attempt to secure interleaved channels suitable for making communication between vehicles. In addition, they have utilized M/M/n and M/G/m models in order to evaluate the probability that a vehicle finds all channels busy as well as to derive the expected idle time. Two preemptive priority multiserver queuing models were formulated to represent only a snapshot of the system where static subset of the licensed channel happen to be interleaved. However, the model is built on top of restrictive assumption that the number of intercommunicating vehicles was fixed. Indeed, when assuming vehicle-to-vehicle communication, it is highly unlikely that the number of communicating nodes is fixed.
CR is a promising and spectrum-efficient communication technology for resource constrained WSNs due to their event driven communication nature having bursty traffic depending on the characteristics of the event. WSNs may get benefit of CR to eliminate collision and excessive contention delay incurred by dense deployment of sensor nodes. Hence, recently, investigation of CR-based WSNs received plenty of research interests [17–21]. In [22] the main challenges and principles for delay-sensitive data transport in CRSN were introduced. Furthermore, the authors explored the existing transport protocols and algorithms devised for CRSN. The channel assignment problem in cluster-based multichannel CRSN has been investigated in [23]. They have developed an R-coefficient to estimate the predicted residual energy using sensor information and channel condition. Park et al. in [24] have investigated an optimal mode selection policy for CRSN powered RF energy harvesting. CRSN powered by RF energy harvesting has advantages of potentially perpetual lifetime and ability to solve interference problems. Maleki et al. in [25] considered a combined sleeping and censoring scheme as an energy efficient sensing technique for CRSN. They proposed a method to minimize the energy consumed in distributed sensing subject to constraints on the detection performance, by optimally choosing the sleeping and censoring design parameters.
However, the proposed solution for CR networks, CR sensor networks, and even CR-based VANETs cannot be directly applied to CR-VASNET. Indeed CR-VASNET has unique characteristics of WSNs, VANETs as well as CR and further amplified by their union. Thus, the existing solutions need to be customized according to the CR-VASNET traits including limited power of stationary nodes, high mobility of mobile nodes, dynamic topology, and frequent disconnections.
3. CR-VASNET Architecture
Mobile and stationary CR nodes form wireless communication architecture of CR-VASNET, over which the sensor readings obtained mostly by VNs are conveyed to the BSs via RSS nodes. The main duty of VNs is to perform sensing on the vehicles. In addition to the common sensing duty, CR-VASNET nodes (both VNs and RSS nodes) perform sensing on the TV spectrum bands in order to discover TVWS, too. VNs send their collected information in an opportunistic manner to their closest RSS node, and, subsequently, the RSS nodes retransmit the received data packet to the next RSS and ultimately to the base station. Figure 1 shows CR-VASNET topology and communications among nodes. The nodes can transmit their data over both licensed and unlicensed spectrum bands.
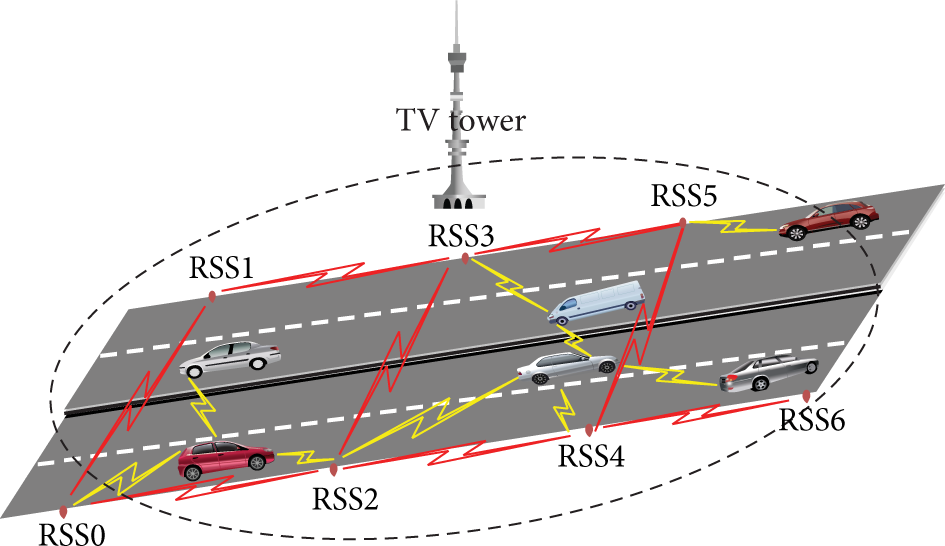
CR-VASNET topology and communications.
Generally, in a distributed sensor network, spectrum sensing may be performed by sensor nodes individually or cooperatively. Spectrum assignment can be based on the individual decision or a group of sensor nodes too. When sensor nodes rely on their own spectrum sensing observation only, they may not be able to detect the appearance of primary users (PUs) due to shadowing. Achieving sensing in a distributed approach is known as cooperative sensing [26]. However, in CR-VASNET, the nodes share their spectrum sensing and decision result with the nodes in their vicinity.
CR-VASNET works on multihop mode; the number of hops which retransmit data packet should be minimized in order to minimize the consumption energy and subsequently enlarge the network life time. This can be achieved by sending data packets over longer distance by accompanying less number of relay nodes in transmission process. The communication range of the RSS nodes depends on their transmission power and the volume of the packet to be sent. Transmission over longer distances requires higher energy. The problem is to find maximum possible distance (nodes' transmission range) that sensor nodes can send data packets while taking care of the consumption energy. Hence, a node has to select another node which is so far from it but in its range. In this way the number of intermediate nodes is decreased as minimum as possible. To do that, we should consider transmission and receiving energy consumption as well as volume of the data packets. Suppose that n is the number of RSSs. The last node is represented as the BS. Let



As it has been illustrated in Figure 2, data transmission over longer distance improves lifetime and end-to-end delay, while it increases the path-loss. And also as shown in Figure 3, path-loss increases due to high frequency and longer distances.

Transmission range versus frequency and transmission power.
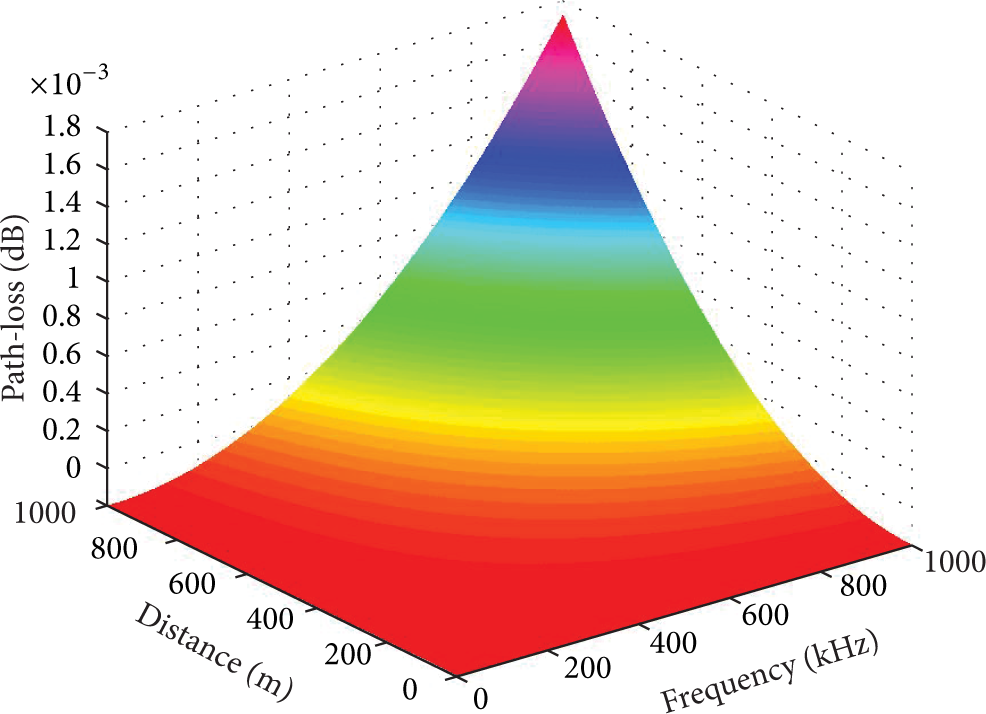
Path-loss rate increases due to high frequency and distance.
Consider two nodes willing to communicate with each other in one-hop mode. The control data (e.g., available communication channel, suitable communication channels for data transmission, and location) and application data (e.g., alarm messages) due to their importance and possibly large volume should be transmitted with high reliability and efficiency, respectively. Therefore, we have to consider control channel disparate from the main channel. However, the control channels are opted from among relatively low frequency with longer range and lower data rate, and in contrary the main channel is picked up from high-frequency bands with higher data rate and shorter range. The elected channels may switch in response to the changes in link conditions dynamically. RSS nodes are aware of their location initially; however, VNs compute their location based on localization algorithm which we proposed in [27]. In addition, the sender and receiver share several common hash functions with location and time as the input key. Hence, the nodes are synchronized by reception of time and location pair. The hash functions are supposed to select channels from among lower frequency channels and return a number of proved channels. These channels are considered as candidate channels. Then, the sender and receiver sense the candidate channels and select the best one as the control channel. After selecting the control channel and exchanging the control data, the sender sends a list of appropriate channels for data transmission to the receiver. Then, the sender based on the received reply from the receiver determines data channel and starts data transmission.
4. CR-VASNET Node Structure
CR-VASNET sensor nodes are a low-cost and low-power device with the ability of sensing vehicle activity that is, velocity, collision, the jerk, inclination degree as well as temperature. As illustrated in Figure 4, the main components of CR-VASNET sensor nodes are: sensing unit, processing unit, power unit and CR transceiver unit. The CR transceiver unit distinguishes CR-VASNET nodes from the classical sensor node, which enables the node to adapt transmission parameters dynamically. It is notable that RSS nodes like other traditional sensor nodes inherit the constraints in terms of processing and power resources, while VNs are involved with the high mobility issue.

Anatomy of (a) wireless sensor node and (b) cognitive radio.
Radio frequency (RF) front-end and the baseband signal processing unit are two major parts of a CR transceiver. To be adapted to the time variation of the RF environment, both radio front-end and the baseband signal processing unit can be configured by a control bus. In addition to sending and receiving, amplifying, mixing, and converting from analog to digital of the received signals are performed in the RF front-end, while modulation, demodulation, coding, and decoding are the tasks to be done in the baseband processing unit. Since the baseband processing unit of the CR is similar to the traditional transceivers, the novelty of CR is the RF front-end. The RF front-end is composed of (1) RF filter; by band-pass filtering the received RF signal selects the desired band. (2) The mixer mixes and converts the received signal with the generated RF frequency and to the baseband. (3) Voltage-controlled oscillator is composed of a signal with a known frequency for a given voltage to be mixed with the received signal. (4) Phase looked loop is for generating exact frequencies with acceptable resolution and also it guarantees that a signal is locked on a given frequency. (5) Channel selection filter is for capturing the requesting channel, and (6) automatic gain control keeps the gain or throughput power level of an amplifier constant over a range of input signal levels.
5. Dynamic Spectrum Management in CR-VASNET
The realization of CR-VASNET necessitates an efficient spectrum access management framework to handle the dynamic spectrum access of sensor nodes. Hence, to make the network protocols adaptive to the available TV spectrum bands, new functionalities are required. In the following subsections, we explore the main necessary functions for dynamic spectrum management and propose the appropriate spectrum access techniques.
5.1. Spectrum Sensing
In CR-VASNET, the nodes are able to operate over unlicensed bands as well as TV licensed spectrum bands. Nodes to capture licensed spectrum need to gather significant spectrum usage information prior to any transmission by sensing the spectrum bands. The spectrum sensing function by detecting TVWS gives the ability to the CR to adapt itself to the environment in which it operates. To detect the PUs, that is, TV users, that are receiving data within the SU's communication range is the most optimal way for spectrum TV white spaces detection. Spectrum sensing is considered as a physical layer issue. There are several spectrum sensing techniques such as cooperative detection, transmitter detection, and interference-based detection. The transmitter detection technique can be classified as matched filter detection, energy detection (ED), and cyclostationary feature detection. Regardless of what kind of detector, errors are unavoidable. Actually, the detector is sketched with the objective of bounding the error. There are two kinds of errors: (1)

Among the mentioned detection techniques, we choose ED technique [28] for our CR-VASNET to sense TV licensed bands in order to capture TVWSs. ED technique is an efficient and fast noncoherent technique that essentially computes a running average of the signal power over a window of prespecified spectrum length [29]. The advantage of the ED is due to its simplicity and ability to be applied on any type of deterministic signal and it requires the least amount of computational power, and the receivers in this technique do not need any knowledge of the PUs' signals. In CR-VASNET, ED technique is applied in order to achieve efficient bandwidth. Since most of the TV spectrum bands are blank, the users in CR-VASNET performs ED technique for spectrum sensing to discover many interleaved spectrum bands, TV white spaces. CR-VASNET based on ED technique leads to increase safety and information agility for the vehicles on the highway roads affected by multipath shadowing and fading. Furthermore, data transmission of PUs is modeled as signal with a certain power, so the energy detector is optimal. Thereby, ED performance analysis in CR-VASNET with a variety of integrated techniques is of particular interest. CR-VASNET requires reliable and low latency wireless communication methods.
The signal is detected by comparing the output of the energy detector with a threshold based on the noise floor. Figure 5 shows the block diagram of the energy detector. The received signal is filtered with a band pass filter (BPF) to select the bandwidth. After that, the filtered signal is squared and integrated over the observation interval. The output will be compared to the threshold to determine the presence or absence of the PU. After analyzing the spectral environment, fast Fourier transform (FFT) based techniques will be applied to obtain frequency response. The detection test is based on the two hypotheses (4). The noise is supposed to be AWGN with zero mean and


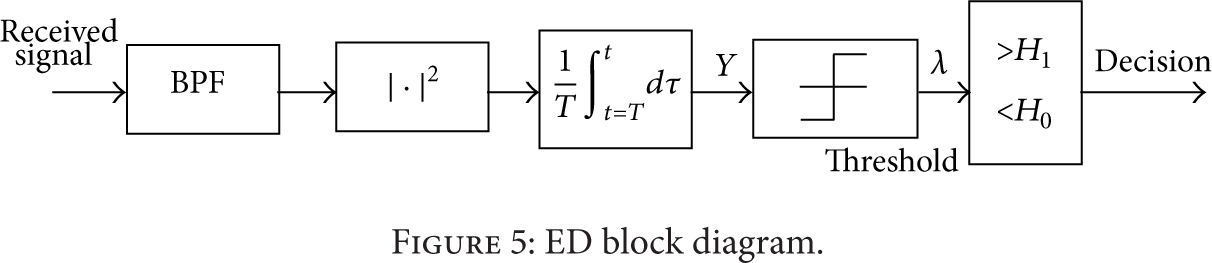
ED block diagram.
5.2. Spectrum Analysis
The available TV white spaces show various characteristics which vary over location and time. Since CR-VASNET users are armed with the CR based physical layer, it is essential to understand the characteristics of different TV bands. Spectrum analysis as a part of spectrum management enables the characterization of various TV spectrum bands, which can be used to get the spectrum suitable to the user necessities. The sensed TVWS should be described considering (1) time varying radio environment, (2) spectrum band information, and (3) PUs' activity. The quality of a white space can be presented by some parameters such as holding time, path-loss, channel error rate, link layer delay, and interference level.
5.3. Spectrum Decision
CR-VASNET nodes must analyze the sensing information and make a proper decision about the channel and transmission parameter (such as carrier frequency range, modulation strategy, and maximum output power) for current transmission. Spectrum management function must be conscious about system quality of service (QoS) requirements too. Bandwidth of transmission, delay bound, acceptable error rate, transmission mode, and data rate could be some instances of QoS parameters. It has been shown that the TV spectrum sensing result will be the same in any given location [31]. Based on this observation, usually spectrum decision of the nodes for the adjacent nodes will be similar. Because of this, if nodes try to access a channel based on their individual spectrum decision, collisions cannot be dissembled. At the time of the collision, nodes try to switch to another available channel, since all the nodes are running a similar algorithm; the collided nodes leave the previous channel and collide again on the new founded channel. As a result, we conclude that spectrum decision in CR-VASNET must be coordinated to achieve the maximum overall utilization and optimum power consumption.
In CR-VASNET, the users need to specify spectrum availability individually based on their observation. Since, the observed range of nodes is limited and less than their transmission range, if the nodes find the TV white spaces, then their transmission may cause interference at the TV receiver inside their transmission range. Thus, in CR-VASNET, spectrum sensing requires an efficient cooperation approach in order to prevent interference to TV users outside the observation range of each CR-VASNET user. In cooperative sensing, observations from multiple SUs are combined to improve detector performance. Particularly, cooperative sensing is useful since the performance of a single detector can severely degrade due to fading or shadowing. For cooperation, when a CR-VASNET user detects TV user activities, it has to notify its observation to the nodes in its vicinity to vacate the busy spectrum. However, the mentioned control channel (explained in Section 5.1) is used to discover neighbors of a CR-VASNET user and exchanging sensing information. However, in CR-VASNET coordination and spectrum decision is going to be handled by distributed approaches. In this approach, nodes share their yielded results of spectrum sensing and decision with their adjacent nodes. The salient advantages of the mentioned approach are minimum communication and power overhead.
5.4. Spectrum Mobility
CR-VASNET target is to utilize the TV spectrum in a dynamic fashion by allowing the radio terminals to transmit data in the best available TV spectrum band. However, the nodes have to obtain the best TV available spectrum. We define spectrum mobility as the process when a CR-VASNET node changes its operating frequency. In the following subsection, we explain the spectrum hand-off concept.
5.4.1. Spectrum Hand-Off
Detection of presence of PUs to avoid harmful interference is a serious challenge in CR-VASNET. However, in case of presence of PUs or, if current channel status becomes unsatisfactory for an operation, the CR-VASNET users must immediately switch to another available channel decided by an effective spectrum decision approach. The CR-VASNET users must do it compulsory, even if they have an ongoing transmission. This function is known as “spectrum hand-off” [27]. When spectrum hand-off is required, an alternative TV white space should be determined. Then sender and receiver nodes have to handshake for transmission over new channel. After that, nodes can continue their transmissions. It is important for the mobility management algorithms to learn about the duration of a spectrum hand-off function in advance. This information should be prepared by the sensing mechanism. Once the mobility management protocols acquired the information about this latency, they have to guarantee that the ongoing transmission of the CR-VASNET user endures the least performance degradation. Subsequently, multilayer mobility management protocols are necessary for accomplishing the spectrum management mechanisms. The mentioned protocols support mobility management adaptive to the various types of CR-VASNET applications. While spectrum hand-off function is going on, a TCP connection can be put to a wait state. However, it is needed to learn the new parameters and guarantee that the transmission from the previous parameters to new parameter is carried out quickly, because the TCP parameters will change after spectrum hand-off. Data packets in CR-VASNET are very vital and the system must take care to prevent any packet loss. But during hand-off mechanism it seems that probability of packet loss increases. In this case, the mobility management algorithms must deploy scenario to store the data packets, which are transmitted while spectrum hand-off is going on.
6. CR-VASNET Communication Architecture
The sensor nodes are deployed in vehicles as well as both sides of highway roads. Vehicular nodes have the capabilities to collect imperative data and route data to the base stations. Sensor readings are routed to the end users by multihop infrastructure architecture via intermediate nodes, that is, RSS nodes. The BSs may communicate with the task manager node via satellites or the Internet. The protocols stack which may be used by CR-VASNET nodes consists of five layers and three planes [32]. The planes are to help sensor node o coordinate the sensing tasks and lower overall power consumption. More specifically, the power management plane manages power consumption, for example, defining sleep and wake status for the nodes. The mobility management plane monitors the movement of sensor nodes, so a route back to the user is maintained always. And finally, the task manager plane balances and coordinates the sensing tasks given to a given region. In the following subsections, we investigate and briefly explain the specific design consideration of each communication layer of nodes with respect to dynamic spectrum management.
6.1. Physical Layer
The physical layer of sensor nodes—both VNs and RSS nodes—must provide the ability of reconfiguration of the operating frequency: channel coding, modulation, and also output power without applying any change in hardware structure. For reconfigure-ability of sensor nodes designing of software defined radio-based RF front-end transmitter and receiver is indispensable. Anyhow, there are many more challenges for designing a suitable physical layer for the nodes due to their resource constraints. In summary, we can mention the following as the most important issues: (1) wideband spectrum sensing, (2) cognitive learning, (3) advanced modulation schemes, (4) limited capabilities of A/D converter, (5) heavy signal processing algorithms, and (6) detecting weak signals, for example, presence of PUs.
6.2. Data Link Layer
Generally, this layer is responsible for reliable sending and receiving of data frames between communicating nodes. The most important functionalities of data link layer are medium access control (MAC) and error control and correction. However, in CR-VASNET with respect to the dynamic spectrum management and energy efficiency, it tries to achieve the goals. Forward error correction (FEC) and automatic repeat request (ARQ) are the main error control schemes proposed for WSNs. In ARQ, high power consumption and low bandwidth utilization are the major weakness opposite to its advantages like its simplicity. However, it seems that FEC approaches are promising for CR-VASNET nodes due to their constraints. In FEC schemes, to recover bit errors, a particular magnitude of redundancy is included in the packet to be used by the receiver.
The complexity of the error correction algorithm and redundancy are effective on the amount of error that can be corrected. CR-VASNET is assumed to be able to access multiple TV frequencies. However, each TV channel may have various conditions, so a fixed FEC approach may not provide optimal results for different channels. It should be considered that, in some cases, when the channel condition is satisfactory, ARQ in comparison to FEC returns acceptable performance. Thus, this trade-off should be considered and it seems that combination of these two—FEC and ARQ—schemes may yield better performance. MAC protocols are supposed to provide the nodes with means to access the communication medium in efficient and fain manner. In CR-VASNET, data packets are very important, and all the capabilities must be employed to decrease packet loss as much as possible. Acting based on RTS/CTS (exchange of acknowledgment packets) is a proper way. Therefore, once an originated packet from VNs is received by the RSS nodes, to be forwarded to the BS, the RSS nodes may handshake to negotiate on the available channel prior to any transmission. Exchanging of acknowledgment packets is necessary for channel negotiation.
6.3. Network Layer
CR-VASNET as an application of WSN needs special multihop wireless routing algorithm among the vehicular nodes, RSS, and the base stations. An energy efficient and fair routing algorithm for vehicular sensor networks has been proposed by us already [33]. CR-VASNET inherits network layer issues from traditional WSNs [34, 35] and mobile ad hoc networks (MAENT) [36–38] such as infrastructure-less, unstable topology, multihop networking, energy efficiency data-centric routing, attribute-based routing, and localization, and rather than the mentioned challenges, the proposed routing protocols for CR-VASNET must consider dynamic spectrum access issues like channel access delay, interference, operating frequency, and bandwidth too. Furthermore, CR-VASNET as a multihop network, which the RSS nodes send data packets to the next hope, spectrum decision may change the next hope status. And also, because RSS nodes are limited in energy, hop count must be considered and it should be as less as possible. Hence, a new routing algorithm which takes care of both sensor network metrics and opportunistic spectrum access is required. Routing algorithms in ad hoc and sensor networks are classified as topology-based and position-based. The topology-based routings are categorized as proactive routing, reactive routing, and hybrid routing algorithms. Proactive routing protocols are not fair for dynamic topology caused by opportunistic channel access in CR-VASNET. Therefore, it seems that reactive routing algorithms are more suitable. However, with the communication overhead and increased contention, dynamic spectrum aware reactive routing can be considered for CR-VASNET.
6.4. Transport Layer
End-to-end reliable delivery, congestion control to preserve scarce network resources, for example, energy, and taking care of application based QoS requirements are the major functionalities of transport layer. When sensor nodes detect an event, they try to send their readings towards the base station. This makes a bursty traffic into the network. Significant sensor collected data must be reliably delivered to base station to obtain detection and tracking of an event signal. Simultaneously, if the multihop network capacity exceeded, congestion is the result which thereby yields high power consumption. However, there is delicate balance between reliability and energy efficiency, which has been the main focus of transport layer solutions proposed for WSNs so far [3]. While the mentioned balance between reliability and energy efficiency is owned by CR-VASNET, the CR features bring other issues like varying channel characteristics and temporal inability to transmit silent sensing period. However, we can mention that spectrum aware reliability, opportunistic energy efficient transport, and real-time cognitive reliable transport are the main issues involved with this layer for CR-VASNET.
6.5. Application Layer
In case of WSNs, the application layer may be responsible for some functions like generation of information, interest and data dissemination, feature extraction of event signals, methods to query sensors, and data aggregation and fusion. However, in our proposed system, these services have to utilize the capabilities of CR-VASNT while conforming to its constraints. Therefore, designing of new protocols for this layer with respect to its pros and cons is required.
The purpose of data aggregation and fusion protocols is to reduce the communication cost while it tries to increase estimation performance. However, in CR-VASNET nodes' transceivers may tune to various channels; it means that a node is not capable of hearing all data transmission in its surrounding area. In [30] we have proposed a fuzzy-based data fusion protocol for vehicular sensor networks, in which we tried to employ fuzzy techniques to reduce number of transmissions or transmitted packet size to improve energy efficiency and network utilization. Nonetheless, still there are some considerable issues like developing approaches to do sampling of the event signal and collect sensory information based on spectrum availability. Specifically in CR-VASNET, where the sensing result should be sent to the base station when an event happens, mechanisms to discover the available spectrum in on-demand fashion must be investigated. From another view of CR-VASNET, where there is a query from the base stations, new query methods that take spectrum availability into account must be designed.
7. Simulation Results
In this section, we show our simulation results for distance optimization and PU detection. For simulation of distance optimization, we assumed that there are 100 nodes randomly distributed. One of them is supposed to be the final destination, the BSS. The transmission power is supposed to be in range of −13 to 11 dBm. The link distance between two adjacent nodes is varied between 15 and 30 meters. The radio dissipating is assumed to be 350 nJ/bytes to run the sender or receiver circuitry and 750 pJ/byte/m2 for the sender amplifier. The other variables are assumed to be

Percentage of successful packet reception versus transmission power over different distance between the sender and the receiver.
For simulation of PU detection probability, we assumed that 100 RSSs are randomly deployed in area of

Probability of PU detection versus average signal-to-noise ratio.
Figure 8 shows probability of detection and probability of false alarm with different SNR values, for example, 1, 2, and 3 dB. It can be observed that the probability of detection is increased, when the probability of false alarm increases.
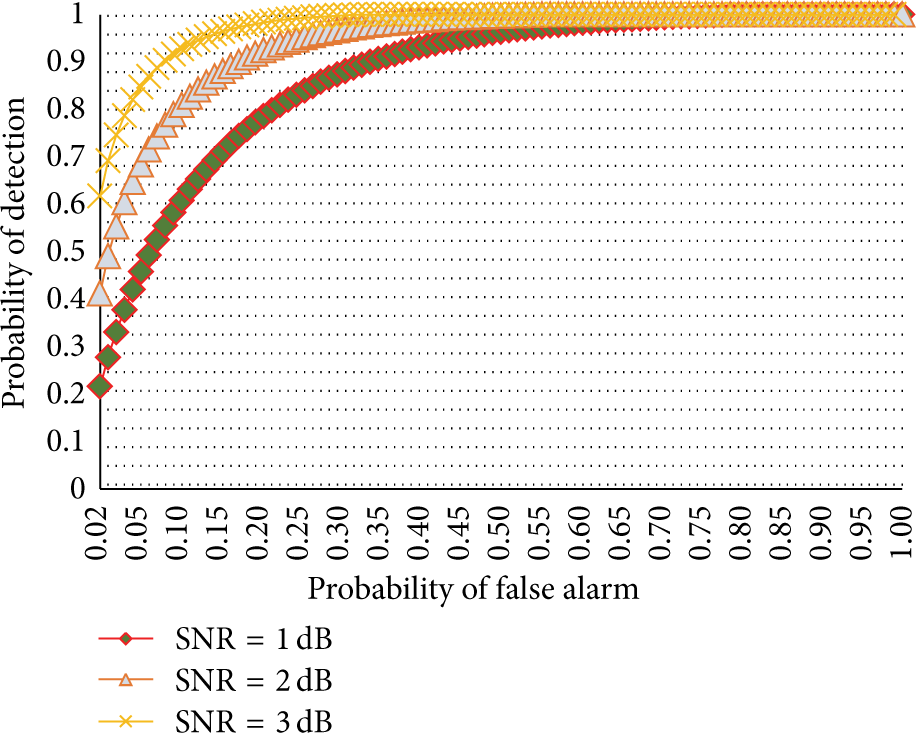
Probability of PU detection versus probability of false alarm with different SNR values.
8. Conclusion
In an opportunistic manner and adaptability to the channel condition, spectrum utilization and communication can be increased by employing CR Technology. The mentioned features are applicable to the vehicular sensor networks with respect to their unique constraints. Furthermore, CR is able to provide multiple channel availability, which can be exploited to overcome the issues caused by bursty traffic of vehicular sensor networks. In this paper, we have investigated Cognitive Radio-based Vehicular Ad Hoc and Sensor Networks (CR-VASNET), as a new vehicular networking paradigm formed by adopting CR capabilities in Vehicular Ad Hoc and Sensor Networks to access TV white spaces in an opportunistic manner. We discussed advantages and constraints of CR-VASNET such as; network architecture, node structure, spectrum access management, and communication architecture. We have optimized the distance between the sender and the receiver (relay node selection) to save the RSSs' energy consumption and consequently enlarge the network lifetime. Furthermore we have proposed a scheme for PU detection in order to mitigate interference from CR-VASNET users to the incumbents. The results of our investigations and simulations introduce the proposed CR-VASNET as a potential candidate for vehicular networking to achieve higher safety and convenience in the highway roads.
Footnotes
Conflict of Interests
The authors declare that there are no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was funded by the MSIP (Ministry of Science, ICT and Future Planning), Korea, in the ICT R & D Program 2014.