
Abstract
Recently, camera sensor network is attracting huge amount of attention due to the growing popularity of multimedia applications. This paper investigates a new scheduling problem in camera sensor network whose goal is to cover a set of targets as efficiently as possible during a given mission period. In particular, we consider a desperate situation in which we may not have enough camera sensors to cover all of the targets of interest during the mission. The goal of our problem of interest is to schedule the sensors such that (a) the number of the most important targets which are fully covered during the mission period is maximized, and (b) the overall target-temporal coverage which is defined as the gross sum of the weight of each target multiplied by the time period when the target is covered is maximized. We formally introduce the desperate coverage problem in mission-driven camera sensor networks (DCP-MCSN) and propose a new heuristic algorithm for this NP-hard problem. To evaluate the performance of the proposed algorithm, we compare it with a theoretical upper bound. Our simulation result shows that our algorithm performs very close to the upper bound and outperforms the existing alternative.
1. Introduction
Thanks to the growing popularity of multimedia applications of wireless sensor networks, camera sensor networks, which are wireless networks of camera sensors, are getting more attention very recently. A camera sensor node is a kind of directional sensor node whose sensing range resembles a sector of a disk. In Figure 1, the sector with a solid line is the area covered by a directional sensor

The sensing model of the directional sensor.
The sensing model of the camera sensor.
Most wireless sensor nodes are battery-operated and it is very difficult or expensive to replace or recharge the battery. As a result, energy efficiency has been a major issue of wireless sensor networks. One popular approach to extend the lifetime of wireless sensor network is to exploit the redundancy of coverage in wireless sensor network. That is, in many application scenarios, sensor nodes are randomly deployed and thus it is highly likely that a target of interest can be monitored by more than one node at the same time. Then, we can make a sleep-wakeup schedule of the nodes which can cover the same target and activate them one by one while the rest of them fall asleep. In the literature, the problem of computing a sleep-wakeup schedule of sensor nodes such that the total time period satisfies a certain coverage quality requirement is referred as a “coverage problem.” One popular coverage problem is the full-coverage problem whose goal is to maximize the lifetime of a sensor network while seamlessly covering an area or targets of interest [1, 2].
Most coverage problems in wireless sensor networks have focused on the lifetime maximization issue. In those problems, the lifetime of the networks is an optimization goal, not a constraint. However, this is not always the case in reality. For instance, consider an application of wireless sensor networks in which we have to cover an area of interest or a set of targets during “a given mission period” (which is a constraint), but we do not have enough sensors to fully cover the whole area or the targets regardless of the scheduling algorithm we use. Certainly, the existing coverage algorithms that we discussed so far cannot deal with this situation. Recently, Liu and Cao introduced one way to handle this challenging issue. Given a required surveillance mission period, they suggested to maximize the spatial-temporal coverage of the area or targets of interest, which is defined as the gross sum of the total time that each distinct area is covered multiplied by the size of the area (in case of area coverage) [3] or the gross sum of the weight of each target covered multiplied by the total time duration that the target is covered (in case of target coverage) [4]. Very recently, Hong et al. extended this idea and investigated a spatial-temporal coverage problem in camera sensor networks [5].
In this paper, we introduce another way to deal with the question of how to provide the best quality coverage over a set of targets of interest during a given mission period with insufficient number of camera sensor nodes. This study is motivated by our observation that when we solely aim to maximize the coverage quality (the total target-temporal coverage) like [4, 5], it is possible that some targets with the highest priority could be deprioritized by a number of insignificant targets, and as a result, relatively ignored in the course of the schedule building process. The problem of monitoring a warehouse with two entrances during a certain time period is a good example. Clearly, the entrances are the most important targets since the face of any trespasser can be easily detected by a camera observing the entrance. Meanwhile, a shelf inside the warehouse without any item is clearly a less-important target. To deal with this situation, we suggest providing full coverage to as many higher priority targets as possible during the mission period while the spatial-temporal coverage over the rest of targets can be maximized. We would like to emphasize that we are not trying to refute the significance of the target-temporal-maximization-only approach used in [4, 5], but we attempt to propose a new complement for those approaches to deal with this desperate situation. The main contributions of this paper can be summarized as follows.
We introduce a new scheduling problem in camera sensor networks, namely, desperate coverage problem in mission-driven camera sensor networks (DCP-MCSN). More formal description of the problem is given in Section 4.
We propose a new heuristic algorithm for our new NP-hard problem, called desperate coverage algorithm in mission-driven camera sensor networks (DCA-MCSN). In detail, given a set of camera sensors, a set of targets, and a mission period, DCA-MCSN performs a binary search (see Figure 3) to find a constant k such that the most k important targets are fully covered during the mission period. During the search process, k is assumed to be a some constant (e.g., initially
We compare the average performance of DCA-MCSN with the theoretical upper bound in simulation as well as with the only existing competitor in [5]. Our simulation result shows that our algorithm outperforms the target-temporal-maximization-only algorithm in camera sensor network in [5] in terms of the number of the most important targets which are fully covered during the whole mission period.
(1) (2) Run Identifiability Test and compute (3) (4) Set (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) break; /* quit the loop */ (20) (21) (22) (23) (24) (25) Return 𝒵.
(1) (2) (2.1) (2.2) (2.3) (3) (4) (5) (6) (7) Find the Note that if period (8) Return
(1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) Construct a maximal independent set (13) (14) (15) (16) (17) (18) (19) (20) Return (21) (22) (23) (23.1) (23.2) (24) Return

DCA-MCSN is a binary search algorithm to identify the maximum number of the most important targets which can be seamlessly covered by the camera sensors during the mission period and corresponding scheduling.
The rest of this paper is organized as follows. Section 2 presents related work. Some preliminaries are introduced in Section 3. We introduce the formal definition of DCP-MCSN and our algorithm for this problem in Section 4. Our simulation result is presented in Section 5. Finally, we conclude this paper in Section 6.
2. Related Work
Frequently, the problem of constructing a sleep-wakeup schedule of a wireless sensor network with the goal of maximizing the continuous monitoring time to meet a given coverage quality requirement is referred as a coverage problem [2–4, 6]. Most types of wireless sensor networks thoroughly investigated in the literature consider sensor nodes with omnidirectional sensing range. Consequently, the area covered by those sensor nodes resembles a disk with the node in the center of it. In contrast, the sensing area covered by a directional sensor node looks more like a sector of a disk [7]. In [8], Cai et al. have investigated the multiple directional cover set problem in directional sensor networks, whose objective is to compute a sleep-wakeup schedule of a given set of sensor nodes such that the time for the sensor network to fully cover a given set of targets is maximized. In the meantime, Ai and Abouzeid [9] studied a new coverage problem in directional sensor networks whose goal is given a set of sensor nodes with adjustable camera orientations, to determine the direction (orientation) of each sensor so that the number of covered targets is maximized (primary objective) while the number of sensor nodes used is minimized (secondary objective). In addition, the other aspects of directional sensor networks are also investigated like vulnerability [10], fault-tolerance [11], and so on [12, 13].
Briefly speaking camera sensor network is a kind of directional sensor network and thus they share several properties. However, due to several unique features of camera sensors, especially the effective-sensing surveillance model in Definition 1, the scheduling algorithms for directional sensor networks are not directly applicable to camera sensor networks. Most importantly, a camera sensor node can cover a target only if the face of the target can be seen by the sensor. In [14], Liu et al. introduced the directional k-coverage problem in camera sensor networks whose objective is minimizing the number of camera sensors to cover an area of interest such that any spot in the area can be monitored by at least k different cameras. In [13], Wang and Cao assumed a camera sensor network version of the full coverage problem, called the full-view coverage problem. In this problem, a target is full-view covered by a camera sensor network if we can capture the face of a target which is within the sensing range of the camera sensor network independent of the face direction of the target. Previously, Ma et al. extended the result in [13] and investigated the full-view barrier coverage problem in camera sensor networks.
So far, most coverage problems in wireless sensor networks have concerned about the lifetime maximization issue. Therefore, they are not applicable to a desperate situation in which we are required to cover an area or a set of targets of interest during a given mission period. One possible solution of this challenging issue is introduced by Liu and Cao [3, 4], who suggested to maximize the spatial-temporal coverage of the area or targets of interest. In our previous work, we extended this idea and investigated a spatial-temporal coverage problem in camera sensor networks [5]. However, Liu and Cao's approach comes with a nonneglectable shortcoming—a target with the highest priority could be deprioritized by a number of insignificant targets, and as a result, is ignored by a scheduling algorithm. In this paper, we address this issue and attempt to propose an alternative solution of the problem as a complement of Liu and Cao's approach.
3. Preliminaries
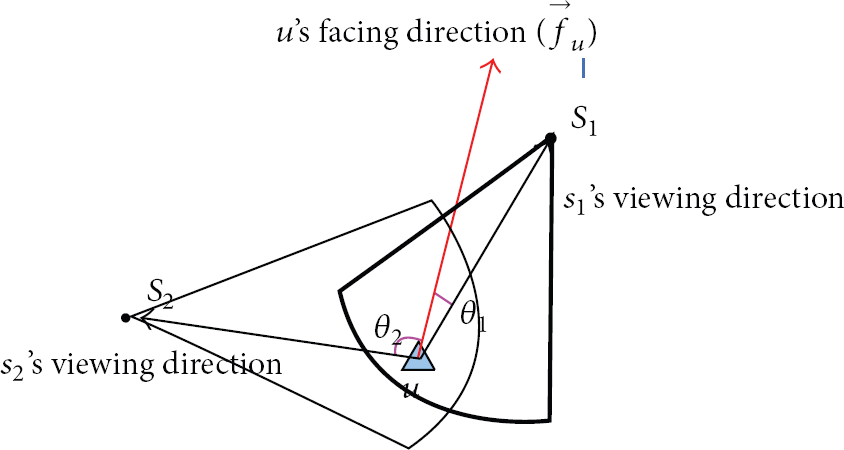
In this section, we review two important preliminaries of our paper, the effective-sensing model in camera sensor networks [14] and the Identifiability Test [5], which is a procedure to check, given a set of targets and a set of camera sensors, if the target is effectively covered by the camera sensors. As we mentioned earlier, this paper assumes that a target is recognized or effectively sensed (covered) by a camera sensor if the facial view of the target is observed by a camera sensor. The face direction of each target can be estimated by an existing head pose estimating strategy such as the one in [15]. A more formal definition of the effective-sensing model in camera sensor networks is as follows.
Definition 1 (effective-sensing model).
Consider a target

In this figure, a target
In this paper, we consider a camera sensor network of n camera sensors and m targets of interest. Each camera sensor is with uniform beamwidth θ and with
Definition 2 (identifiability test).
A target
Subtest 1. Check whether
Subtest 2. Check whether
Subtest 3. Check whether
From now on,
4. Desperate Coverage Problem in Mission-Driven Camera Sensor Networks (DCP-MCSN) and Its Solution
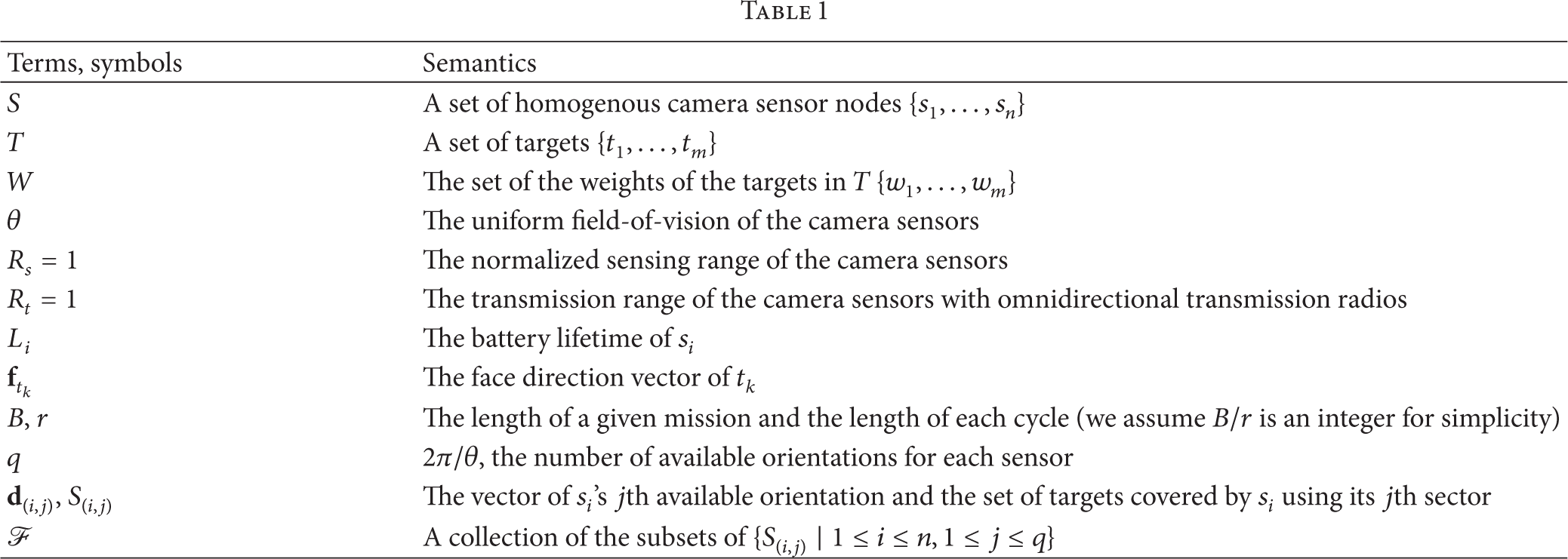
Now, we introduce the formal definition of DCP-MCSN in Section 4.1 and our solution for this problem, namely, desperate coverage algorithm in mission-driven camera sensor networks (DCA-MCSN) in Section 4.2. Table 1 summarizes the terms, notations, and their semantics used in this paper.
4.1. Formal Definition of DCP-MCSN
Definition 3 (DCP-MCSN).
DCP-MCSN is to find a subcollection (schedule)
Theorem 4.
DCP-MCSN is NP-hard.
Proof.
A simpler form of DCP-MCSN without the second requirement regarding maximizing the number of the first k pivotal targets is already proven to be NP-hard in [5]. Therefore, this problem is NP-hard.
4.2. Desperate Coverage Algorithm in Mission-Driven Camera Sensor Networks (DCA-MCSN)
In this section, we introduce our algorithm for DCP-MCSN, namely, DCA-MCSN. Given a set of camera sensors, a set of targets, and a mission period, DCA-MCSN performs a binary search (see Figure 3). In detail, initially the number of the most important targets which can be seamlessly covered by the camera sensors is set to
4.2.1. Sector-Decider
Algorithm 1 is the formal description of S
In detail, in the preliminary phase (Lines 5–7), for each target The first part (Lines 9–15) is for the case that there exists at least one target among the most important k ones which may not be fully covered during the whole period r. And this part is used to determine an active sector for an undecided sensor node such that there are more uncovered targets among the most important k targets which will be covered. Once we find such a sector, for example, The second part (Lines 17–22) is for the case that all the most important k targets could be fully covered during the whole period r. This part is used to add more sectors to 𝒵 such that the total target-temporal coverage can be maximized.
4.2.2. Sensor-Scheduler
Algorithm 2 is the formal description of S a single sector a subcollection 𝒵 itself; the set
The goal of this algorithm is to determine the schedule of sector
4.2.3. Network-Scheduler
Based on the above two subprocedures S
This algorithm is based on the assumption that all camera sensor nodes are already scheduled; that is, the activation period of each camera sensor node is already determined randomly, and we try to refine the schedule of each node (one by one) based on the current schedule of the other nodes such that the overall target-temporal coverage can be maximized. Note that the preassignment of the schedule of all nodes can be done via assigning each node's beginning time with
In detail, in Line 1, S
4.2.4. A Big Picture
Now, we give a simple example to illustrate how the overall algorithm works. The camera sensor network is composed of

An instance of the overall algorithm.
In Figure 5, each sensor has been assigned the working direction; that is, Lines 1–7 of Algorithm 3 have been accomplished for this network, and we obtain each sensor's neighbor set: In the first loop,
For The output of Algorithm 2 on For We can easily get that In the second loop,
For For We can easily get that
After the second loop,
5. Simulation Results and Analysis
In this section, we present our results and discuss the performance of our algorithm for DCA-MCSN. Specifically, we randomly deploy n camera sensor nodes and m targets within a 100 × 100 2-D virtual space, where n is set to 150,
In the simulation, we study the average characteristic behavior of the proposed algorithm and evaluate its average performance with regard to the target-temporal coverage
5.1. Simulation Results for DCA-MCSN
In Figure 6, we compare the performance of DCA-MCSN against

Target-temporal coverage achieved by DCA-MCSN versus the number of sensors.
Next, we study Figure 7 in which we fix the number of sensor nodes deployed to 250 and vary the number of targets to be covered from 20 to 70. This result clearly shows that the performance of our algorithm is close to the theoretical upper bound independent of the other parameters including

Target-temporal coverage achieved by DCA-MCSN versus the number of targets.
5.2. Simulation Results for DCA-MCSN versus ACA
In this subsection, we compare the performance of DCA-MCSN against ACA (TEC-NC-Adjuster) in [5] (which showed outstanding performance for solving the target-temporal effective-sensing coverage with adjustable cameras problem, TEC-AC, in the simulations) under the 3 parameter settings (Cases (d)–(f)) while the number of targets to be covered is fixed to 50. We study how many important targets are fully covered by the two strategies (see Figure 8). From this result, we can observe that for both of the strategies, the number k of the most important targets which are fully covered during the mission period is affected by θ; that is, k is steadily increasing along with the growth of θ. Furthermore, DCA-MCSN works better than ACA under all parameter settings, which implies that DCA-MCSN is more efficient than ACA for the mission-driven application considering the coverage quality of the targets with higher priority.

The number of the first k important targets covered by sensors by DCA-MCSN versus ACA.
6. Conclusion
In this paper, we investigate a new coverage problem in camera sensor networks. In this problem, we study how to schedule a given set of camera sensor nodes to cover a set of given targets with weight related to their importance and fixed face directions such that the number of the first k important targets effectively covered during a given mission period can be maximized as well as the overall target-temporal coverage is maximized (as the secondary optimization goal). The main contribution of this paper is the possibility of using insufficient number of camera sensors to best support a coverage mission in a way that was never considered before. Since we do not always have enough number of sensor nodes to complete a coverage mission, our paper is of great applicability in many real application scenarios. As a future work, we plan to study the applicability of this model in the hybrid sensor network of both a number of cheap static sensor nodes and a few expensive mobile sensor nodes, which we believe also have a wide range of applications in many real-life scenarios.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was jointly supported by National Natural Science Foundation of China under Grant 91124001, the Fundamental Research Funds for the Central Universities, and the Research Funds of Renmin University of China 10XNJ032.