
Abstract
An integrodifferential equation which describes the charged particle motion for certain configurations of oscillating magnetic fields is considered. The local polynomial regression method (LPR) is used to solve this equation. The reliability of this method and the reduction in the size of computational domain give this method a wider applicability. Several representative examples are given to reconfirm the efficiency of these algorithms. The results of applying this theory to the integro-differential equation with time-periodic coefficients reveal that LPR method possesses very high accuracy, adaptability, and efficiency.
1. Introduction
Most scientific problems in engineering are inherently nonlinear. Except a few number of them, majority of nonlinear problems such as complex integro-differential equation do not have analytical solution. Therefore, these nonlinear equations should be solved using some other methods. Some mathematical methods have been employed to solve different physical differential equations, such as Homotopy perturbation technique by authors [1–4], Homotopy analysis method given by Dehghan and Shakeri [5], time periodic coefficients by Machado and Tsuchida [6], hysteretic damping used by Chen and You [7], rapidly vanishing convolution kernels by authors [8], Adomian decomposition method by Biazar et al. [9] and Biazar [10], operational tau approximation by Dehcheshmeh et al. [11], Modified Homotopy Perturbation Method by authors [12], the Tau approximation for the delayed Burgers equation by Khaksar Haghani et al. [13], a modified variable separated ordinary differential equation method solving mKdV sinh-Gordon equation by Xie [14], the projective Riccati equation expansion method and variable separation solutions for the nonlinear physical differential equation in physics by Ma [15], and Lagrange-Noether method for solving second-order differential equations by Hui-Bin and Run-Heng [16]. They are all proved to have efficiency and utility widely. Recently, H. Caglar and N. Caglar [17] have used local polynomial regression (LPR) method for the numerical solution of linear and nonlinear Fredholm and Volterra integral equations [17]. Moreover, they manage to solve fifth-order boundary value problems by using LPR method [18]. Numerical results demonstrate that local polynomial fitting method is more accurate, simple, and efficient. In this study, we consider (1) with time-periodic coefficients:

where a(t), b(t), and g(t) are given periodic functions of time that may be easily found in the charged particle dynamics for some field configurations. Here, we assume and consider the following initial conditions:

The destination of this paper is to use local polynomial regression method for solving integro-differential equations arising in oscillating magnetic fields.
2. Local Polynomial Regression Method
Local polynomial regression technique was first proposed by Hui-Bin and Run-Heng [16] and H. Caglar and N. Caglar [17, 18]. And, this method was also mentioned and used by Su et al. [19–23]. Recently, H. Caglar and N. Caglar [17, 18] firstly took advantage of local polynomial regression method to try to solve the numerical solution of linear and nonlinear Fredholm and Volterra integral equations successfully and evaluated the efficiency and convenience of the method. Meanwhile, they managed to resolve fifth-order boundary value problems by using local polynomial regression method [18] which also showed the efficiency of this technique. Moreover, by comparing with some methods, for an instance, B-spline method, LPR displayed more accuracy. In order to describe the basic ideas of the LPR, firstly, we introduce the mathematical thoughts of local polynomial regression. This idea was mentioned in detail in [19–22, 24–26]. Since the form of regression function is not specified, the data points with long distance from t0 provide little information to y(t0). Therefore, we can only use the local data points around t0. Supposing that y(t) has p + 1 derivative at t0, by the Taylor expansion, for point t, located in the neighborhood of this point t0, we can use the p-order multivariate polynomials to locally approximate y(t) and the surrounding local point of t0; we model y(t) as

where parameter β j depends on t0, so called local parameter. Obviously, the local parameter β j = y(j)(t0)/j! fits the local model with local data and it can be minimized as

where h controls the size of the bandwidth of local area. Using matrix notation to represent the local polynomial regression is more convenient. Below is the design matrix corresponding to (3) with t and Y:
The weighted least squares problem (3) can be written as

Here,

so the solution vector is

Furthermore, we can get the estimation ŷ(t0):

where E1 is a column vector (the same size of β) with the first element equal to 1 and the rest equal to zero; that is, E1 = (1, 0,…, 0)1×(p+1). The selection of K does not influence the results much. We selected the quartic kernel as follows:
3. Parameters Selections
To implement the local polynomial regression and estimator, we need to choose the order p, the kernel K, and the bandwidth h. These parameters are of course related to each other.
First of all, the choice of the bandwidth parameter h is considered, which plays a rather crucial role. A too large bandwidth underparametrizes the regression function [18, 24], causing a large modeling bias, while a too small bandwidth overparametrizes the unknown function and results in noisy estimates. The basic idea is to find a bandwidth h that minimizes the estimated mean integrated square error (MISE):

where T = (T1,…, T
p
). We give the asymptotic bias and the asymptotic variance regression function m(x). Assume that f(x0) > 0 and that f(·), mp + 1(·), and σ2(·) are continuous in a neighborhood of x0. Further, assume that h → 0 and nh → ∞. Then the asymptotic conditional variance of

The asymptotic conditional bias for p − v odd is given by

The asymptotic conditional bias for p − v even is given by

provided that f′(·) and mp + 2(·) are continuous in a neighborhood of x0 and nh3 → ∞, where

The moments of K and K2 are denoted, respectively, by


(Proof see Rupper and Wand [27]), where cν, p(K) is a constant which relates of the kernel function and the order of the local polynomial f(t) is the density function of m(·). However, this ideal bandwidth is not directly usable since it depends on unknown functions.
Another issue in local polynomial fitting is the choice of the order of the polynomial. Since the modeling bias is primarily controlled by the bandwidth, the issue is less crucial. For a given bandwidth h, a large value of p would expectedly reduce the modeling bias, but would cause a large variance and a considerable computational cost. It is shown in [25] that there is a general pattern of increasing variability; for estimate m(ν)(t0), there is no increase in variability when passing from an even (i.e., p − ν even) p = ν + 2q order fit to an odd p = ν + 2q + 1 order fit, but when passing from an odd p = ν + 2q + 1 order fit to the consecutive even p = ν + 2q + 2, order fit, there is a price to be paid in terms of increased variability. Therefore, even order fits p = ν + 2q are not recommended. Since the bandwidth is used to control the modeling complexity, we recommend the use of lowest odd order; that is, p = ν + 1 or occasionally p = ν + 3.
Another question concerns the choice of the kernel function K. Since the estimation is based on the local regression equation (4), no negative weight K should be used. As shown in [25], the optimal weight function is K(z) = (3/4)(1 − z2)+, the Epanechnikov kernel, which minimizes the asymptotic mean square error (MSE) of the resulting local polynomial estimators.
4. Solution of the Integrodifferential Equation
In this section, the LPR method for solving (1)–(2) is outlined. Letting (3) be an approximate solution of (1)–(2),

where t1 = 0 < t2 < ⋯ < t n = 1. We can adjust the value of parameter n flexibly, and it is required that the approximate solution (19) satisfies (1)–(2) at the point t = t i . Therefore, we can transform (1) to (19):

Putting (18) in (19), then we can get the following:
In order to satisfy unique solution theorem of integral-differential equation, we should take initial conditions (2) into account. Consequently, putting (18) to initial conditions (2), then we can acquire the approximate expression (21) as follows:

where t1 = t2 = 0. Consequently, we can deduce the minimization function of (1)–(2) from (4); the minimization function can be written as

t1 = 0 where and t2 = 0. Combining (20), (21) with (22), we can acquire the system which can be expressed as

then, the matrix form (5) can be written as follows by using (23)–(24):


where d3 = a32 + b32 + c32, d4 = a42 + b42 + c42, dn − 1 = an−1,2 + bn−1,2 + cn−1,2, d n = an2 + bn2 + cn2, d3p = a3p + b3p + c3p, d4p = a4p + b4p + c4p, d np = a np + b np + c np ,

Putting (24)–(25) to (9), then estimated set of coefficients β i can be obtained by solving matrix system solution; therefore, approximate-value ŷ(t0) at point t0 can be obtained.
5. Illustrative Tests
In this section, to illustrate the description above and to show the efficiency of the mentioned method for solving (1)–(2), we include some examples with known analytical solutions.
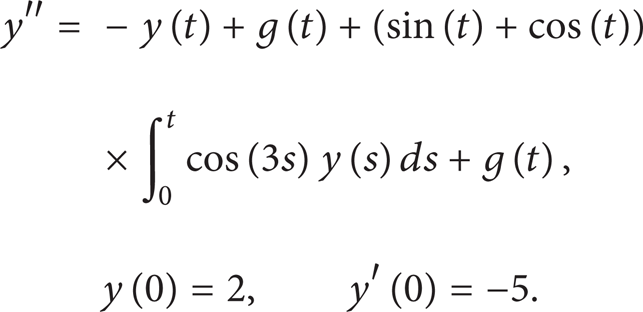
Test 1. Considering (1) with

y(t) = t sin(t) + cos (t) is the exact solution of this equation.
Then we have

To apply the local polynomial regression method to this equation, based on (9), (24), and (25), we calculate the numerical results and absolute errors at point t = 0.0, 0.2, 0.4, 0.6, 0.8, 1.0 by setting up different parameters p, h, and n. Numerical results obtained by these approximations are summarized in Table 1. Figure 1 also reveals the results detailed and explicitly.
The numerical results and absolute errors at point t = 0.0, 0.2, 0.4, 0.6, 0.8, 1.0 given different parameters p, h, and n, Test 1, where LPR(a, b) stands for LPR(h, n).

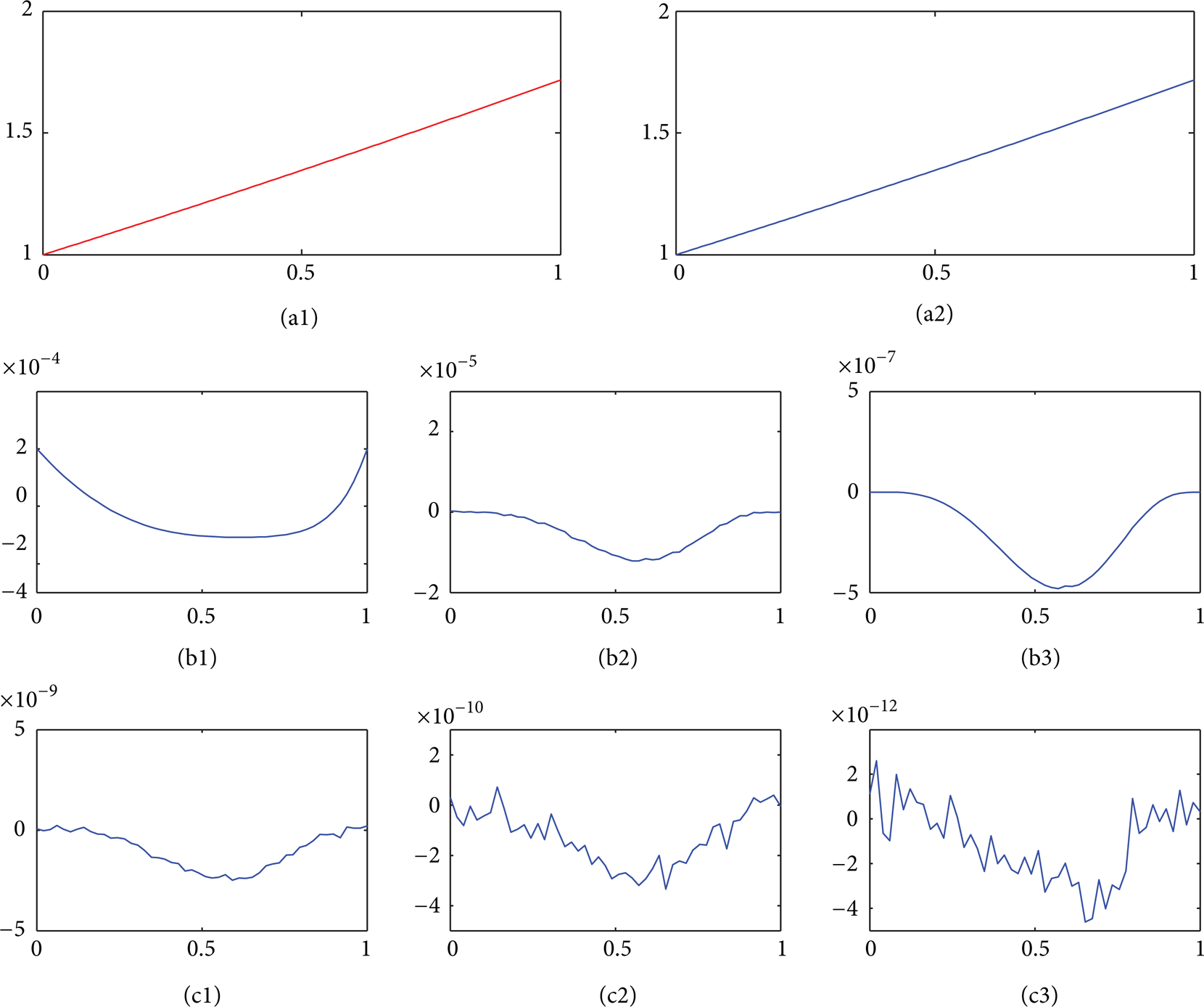
Considering Table 1, we solve the example with n = 30, 50 by choosing p = 5, 6, 7, 8 given various values of parameters h presented in Table 1. The absolute errors in the solutions are computed. Given n = 30, p = 5, 6, it can be seen that the magnitude of absolute errors is between 10 to the power of −4 and 10 to the power of −8. Nevertheless, by setting up n = 50, p = 7, 8, it is obvious that the magnitude of absolute errors is between 10 to the power of −7 and 10 to the power of −11. We conclude that absolute errors decrease with the increase of the value of n and the value of order p has no much influence on absolute errors. Considering only parameter h, specifically, absolute errors get up to minimum for p = 5, 6, n = 30 when h = 0.055, for p = 7, 8, n = 50 when h = 0.045. We can find that the optimal bandwidth h locates in district [0.045, 0.055] by using LPR for n = 30, 50.
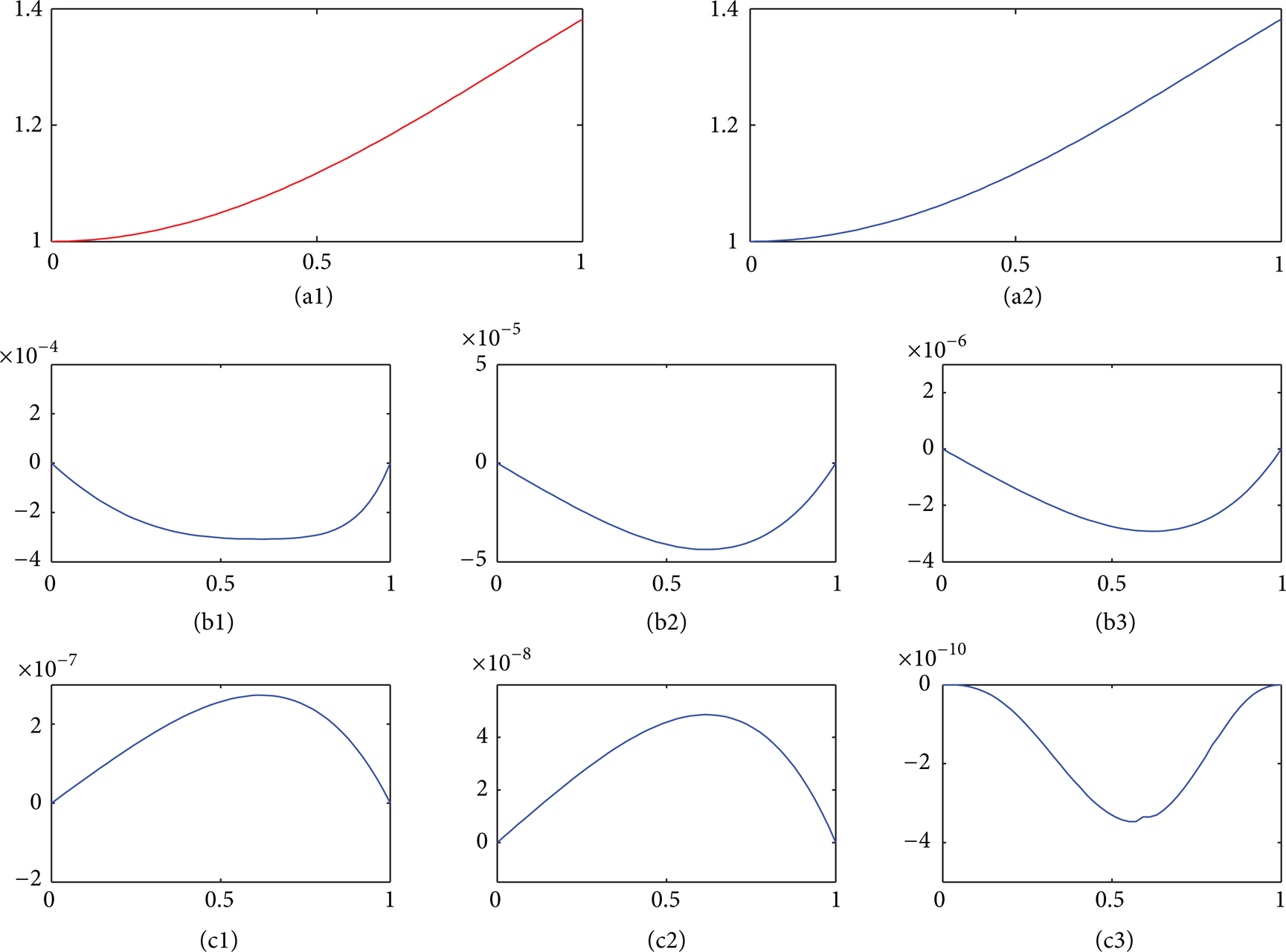
(a1) The exact solution; (a2) the LPR solution for n = 50, p = 7, h = 0.085: the error function for (b1) n = 30, p = 5, h = 0.085: (b2) n = 30, p = 5, h = 0.07: (b3) n = 30, p = 6, h = 0.055: (c1) n = 50, p = 7, h = 0.075: (c2) n = 50, p = 8, h = 0.055: (c3) n = 50, p = 8, h = 0.045 in Test 1.
Test 2. As for the second example, consider (1) with

y(t) = e−t/3 + t is the exact solution of this problem. Then we have

similar to Test 1. We take advantage of the local polynomial regression method to solve this equation, based on (9), (24) and (25) which we deduced above. Then we can calculate the numerical results and absolute errors at point t = 0.0, 0.2, 0.4, 0.6, 0.8, 1.0 by given different parameters p, h, and n. Numerical results are concluded in Table 2 and Figure 2.
Considering Table 2, we solve the example with n = 30, 50 by choosing p = 5, 6, 8, 9 given various values of parameters h presented in Table 1. The absolute errors in the solutions are computed. Given n = 30, p = 5, 6, it can be seen that the magnitude of absolute errors is between 10 to the power of −4 and 10 to the power of −8. Nevertheless, by setting up n = 50, p = 8, 9, it is obvious that the magnitude of absolute errors is between 10 to the power of −9 and 10 to the power of −13. We conclude that absolute errors decrease with the increase of the value of n and the value of order p has no much influence on absolute errors. Again, considering parameter h, specifically, absolute errors get up to minimum for p = 5, 6, n = 30 when h = 0.065, for p = 8, 9, n = 50 when h = 0.045. We can find that the optimal bandwidth h locates approximately in district [0.045, 0.065] by using LPR for n = 30, 50.
The numerical results and absolute errors at point t = 0.0, 0.2, 0.4, 0.6, 0.8, 1.0 by setting up different parameters p, h, and n, Test 2, where LPR(a, b) stands for LPR(h, n).

(a1) The exact solution; (a2) the LPR solution for n = 50, p = 5, h = 0.07: the error function for (b1) n = 30, p = 5, h = 0.085: (b2) n = 30, p = 6, h = 0.07: (b3) n = 30, p = 6, h = 0.065: (c1) n = 50, p = 8, h = 0.055: (c2) n = 50, p = 9, h = 0.045: (c3) n = 70, p = 9, h = 0.045 in Test 2.
Test 3. In this example, consider (1) with

α = 1, β = 0, y(t) = − t3 + t2 − 5t + 2 is the exact solution of this equation. Consequently, we have
Similar to Tests 1 and 2, appling the local polynomial regression method to this equation, based on the (9), (24), and (25), we calculate the numerical results and absolute errors at point t = 0.0, 0.1, 0.3, 0.5, 0.7, 0.9, 1.0 by setting up different parameters p, h, and n. Numerical results obtained by these approximations are also explained in Table 3. Figure 3 provides exact solution, LPR solution, and different error functions given by kinds of parameters.
Considering Table 3, we resolve example 3 with n = 30, 50, 70 by choosing p = 7, 8, 9 given various values of parameters h presented in Table 1. The absolute errors in the solutions are computed. Given n = 30, p = 7, 8, it can be seen that the magnitude of absolute errors is between 10 to the power of −4 and 10 to the power of −8. By setting up n = 50, p = 8, 9, it is obvious that the magnitude of absolute errors is between 10 to the power of −7 and 10 to the power of −11. Nevertheless, By setting up n = 70, p = 8, 9, it is obvious that the magnitude of absolute errors is between 10 to the power of −10 and 10 to the power of −13. We conclude that absolute errors decrease with the increase of the value of n and the value of order p has no much influence on absolute errors. Again, considering parameter h, specifically, absolute errors get up to minimum for p = 7, 8, 9, n = 50 when h = 0.045, for p = 8, 9, n = 50 when h = 0.048. We can find that the optimal bandwidth h also locates approximately in district [0.045, 0.05] by using LPR for n = 50, 70.
The numerical results and absolute errors at point t = 0.0, 0.1, 0.3, 0.5, 0.7, 0.9 given different parameters p, h, and n, Test 3, where LPR(a, b) stands for LPR(h, n).


(a1) The exact solution; (a2) the LPR solution for n = 70, p = 9, h = 0.048: the error function for (b1) n = 30, p = 5, h = 0.085: (b2) n = 30, p = 6, h = 0.055: (b3) n = 50, p = 7, h = 0.055: (c1) n = 50, p = 8, h = 0.04: (c2) n = 70, p = 9, h = 0.056: (c3) n = 70, p = 9, h = 0.048 in Test 3.
6. Conclusions
This paper deals with the numerical solution of an integro-differential equation with time-periodic coefficients which describe the charged particle motion for certain configurations of oscillating magnetic fields by using local polynomial regression method. The kind of technique was tested on three examples and was seen to produce satisfactory results. The reliability of the method and the reduction in the size of computational domain give this method a wider applicability. Furthermore, this technique, in contrast to the traditional methods, does not require a small parameter and the approximations obtained by the proposed method are uniformly valid not only for small parameters but also for very large parameters. The numerical results obtained in this research are indistinguishable due to the fact that this approach justifies its efficiency and presents quite promising results and provides a very high degree of accuracy and efficiency which can be adjused by changing three kinds of parameters p, h, and n without any restrictive assumptions.
Conflict of Interests
The authors declare that they have no possible conflict of interests with any trademark mentioned in the paper.
Footnotes
Acknowledgments
This project was supported by the Natural Science Foundation Project of CQ CSTC of China (Grant no. CSTC2011jjA40033 and Grant no. CSTC2012jjA00037) and was supported by Scientific and Technological Research Program of Chongqing Municipal Education Commission (Grant no. KJ120829).