
Abstract
Wireless body area networks become a new research issue in recent years. In this paper, we propose hibernation and distance estimation schemes for wireless USB (WUSB) over wireless body area networks (WBAN) hierarchical protocol for body sensor networks (BSNs). The proposed middleware platform is composed of hibernation and optimal short distance estimation solution. Firstly, this paper provides WUSB private channel allocation scheme at the m-periodic allocation hibernation of a WBAN superframe. Secondly, three typical location estimation schemes of time difference of arrival (TDoA), frequency difference of arrival (FDoA), and angle of arrival (AoA) are analyzed through comparison of experiment results to propose optimal short distance estimation solution which is executed at each body sensor node on the basis of WUSB over WBAN protocol. And the WBAN host interprets status and motion of the body-sensor objects. The hybrid TDoA/FDoA/AoA algorithm based on UWB ranging shows best performances among the other hybrid schemes for wireless BSNs.
1. Introduction
Development in wireless communication and the miniaturization of computing devices, such as wearable and implantable sensors, enable next-generation communication known as body sensor networks (BSNs). Each BSN comprises several intelligent sensor nodes that should have a communication range of 3 m and dynamic data rates from 10 kbps to 10 Mbps according to application requirements [1]. Each sensor node monitors a human's biometric or surrounding environment information and forwards it to a hub. Using this information, several applications can derive benefits from the BSN. IEEE 802.15 Task Group 6 (IEEE 802.15.6) has recently presented a draft dealing with BSNs [1–3].
BSNs comprise various types of miniature sensors, wearable or even implantable [1]. The obtained measurements are communicated either via a wireless or a wired link to a central node, for example, a personal digital assistant (PDA) or a microcontroller board, which may then in turn display the according information on a user interface or transmit the aggregated vital signs to a medical center. A body medical system may encompass a wide variety of components: sensors, wearable materials, smart textiles, actuators, power supplies, wireless communication modules and links, control and processing units, interface for the user, software, and advanced algorithms for data extracting and decision making.
The wireless body area network (WBAN) is a promising technology that can revolutionize next-generation healthcare applications. The IEEE 802.15.6 WBAN standard is used in or around a body [2, 3]. WiMedia Alliance has completed the specification of WiMedia D-MAC (distributed-MAC), and this enables various applications, such as wireless USB (WUSB) [4], wireless 1394, wireless IP, and operate on WiMedia D-MAC. WUSB can be applied to wireless personal area networks (WPAN) applications as well as wired USB applications such as PAN. Because WUSB specifications have defined high-speed connections between a WUSB host and WUSB devices for compatibility with USB 2.0 specifications, the wired USB applications are serviced directly [5].
As in all distributed systems, time synchronization is very important in a sensor network since the design of many protocols and implementation of applications require precise timing information [6, 7]. Reliabilities for the technologies of position detection mean the measurement errors in the position detection. Presently, there are many different technologies used in position detection. But as signal receiver operating in different locations are used to detect precise positions of objects located at long distances, it is hard to know when user's terminal devices send signals [8]. In this case, the technology using the time of arrival (ToA) is impossibly unreliable, and the time difference of arrival (TDoA) technology is the more suitable [8, 9]. If a TDoA-based electric surveillance system fails to achieve precise time synchronization between devices for separation distance operation, it is impossible to obtain correct TDoA values from signals sent by signal receiver, and such a failure to obtaining the correct values directly affects location estimation error.
In [6], a middleware platform built on WUSB over WBAN hierarchical protocol for wearable health-monitoring systems (WHMS) is proposed. The proposed middleware platform is composed of the new hierarchical MAC, time synchronization, and a localization solution. The presented localization solution in [6] is a trilateration method. But this method is a basic technique in the research area of distance estimations. Furthermore, the proposed WUSB over WBAN MAC included the only beacon signaling and resource allocation schemes.
Therefore, in this paper, we propose a hibernating WUSB over WBAN MAC and an enhanced distance estimation scheme for body sensor networks. The proposed middleware platform is composed of hibernation and optimal short distance estimation solution. Firstly, this paper provides WUSB private channel allocation scheme at the m-periodic allocation hibernation of a WBAN superframe. Secondly, three typical location estimation schemes of TDoA, frequency difference of arrival (FDoA) and angle of arrival (AoA) are analyzed through comparison of experiment results to propose optimal short distance estimation solution which is executed at each body sensor node on the basis of WUSB over WBAN protocol. And the WBAN host interprets status and motion of the body-sensor objects. The hybrid TDoA/FDoA/AoA algorithm based on UWB ranging shows best performances among the other hybrid schemes for wireless BSNs.
2. Indoor Localization Related Works
Wireless sensor networks consist of distributed nodes with restricted computation, communications, and power resources. The applications of wireless sensor networks include military surveillance, environmental observation, surgical operations, and tracking patients and doctors in a hospital. A large number of wireless sensor network applications assume the availability of sensor location information. This is especially true in wireless sensor networks; it is essential to be able to identify the location of various objects.
The most well-known localization system is the global positioning system (GPS) [10]. This system uses 24 satellites to enable three-dimensional positioning services. However, the GPS is insufficient for indoor localization systems, because it is difficult for satellite signals to penetrate buildings and provide highly precise location information. Furthermore, nodes equipped with GPS are not generally accepted in wireless sensor networks, due to unattractive scale and cost and power consumption attributes.
Recently, location systems based on radio signals have been introduced. Some utilize visibility or signal strength measurements of wireless LAN access points [11], while others rely on specialized tags and infrastructure to perform radio signal time-of-flight measurements [12]. Both types of systems have typical accuracies of three meters or more.
In contrast, fine-grained location systems are capable of supplying positioning information with centimeter-level accuracy, which can be used to enhance existing applications as well as enable new applications. A number of fine-grained location-aware applications exist for workplace, home, and public spaces. Ultrasonic location systems have proven to be a relatively simple, effective solution for fine-grained indoor positioning. The Active Bat [13] system is a cell-based localization system in which objects are each attached with tags. Cricket [14] is a system that can provide location-dependent applications using both RF and ultrasonic signals.
The Active Bat consists of a collection of wireless transmitters, a matrix of receiver elements, and a central RF base station. The Bat refers to wireless transmitters that can be carried by tagged objects. This system measures the time of flight of the ultrasonic pulses emitted from a bat to receivers installed in known and fixed positions. It uses the time difference of the arriving signal from each bat for localization. The RF base station controls the bats by means of broadcast messages. When receiving the messages, a bat transmits an ultrasonic pulse. A receiver that receives the RF signal from the base stations determines the time interval of the RF signal and ultrasonic pulse. However, the Active Bat suffers from the privacy problem because the location of objects cannot be determined by the Bat carried by the user. That is, an infrastructure consisting of receivers and central RF base station monitors the location of user. In addition, receivers should always be activated in determining the location of a user, and thus the Active Bat consumes excess energy.
In the case of the Cricket, in order to resolve the privacy problem, it does not rely on centralized management or control and does not have explicit coordination. In order to obtain location information, a listener is attached to every object. Similar to the Active Bat, the Cricket uses a combination of RF and ultrasonic signals for measuring distance. Cricket uses the time difference of arrival (TDoA) using both RF and ultrasonic signals. A beacon transmits an RF signal and an ultrasonic pulse simultaneously. When the listener receives the RF signal, the ultrasonic sensor of the listener is turned on and waits for the ultrasonic signal. When receiving the ultrasonic pulse from a beacon, the listener measures the time interval between RF and ultrasonic signals. Cricket consumes excess energy in determining the location of the object. This is because the RF signal transmission always accompanies the ultrasonic signal during transmission, and all beacons consume energy when attempting to transmit RF and ultrasonic signals, although few are necessary in determining the location of the receiver.
While Cricket system used ultrasound ceramic transducers for the transmitter and the receiver, location systems based on piezofilm transducers have been proposed in order to some inconveniences [15]. Piezofilm transducers present wider radiation diagrams than ceramic transducers, which in principle would provide better coverage of the room to be located. However, the maximum acoustic power that can be radiated by a piezofilm transducer is significantly lower than that radiated by a ceramic transducer. Also, the sensitivity of piezofilm transducers is significantly lower. This reduces the maximum distance between transmitter and receiver when using piezofilm transducers. The ATLINTIDA indoor ultrasound location system is proposed in [16]. By using ceramic transducers and spread spectrum techniques, this system tried to improve robustness in location. However, the updating period of ATLINTIDA is affected by a longer duration in the transmission, due to the use of a longer signal to be transmitted.
In these indoor localization systems interest is focused on using both RF and ultrasonic signals. These systems provide various advantages. Firstly, they can be easily implemented at low cost using wireless sensor networks. Secondly, their location measurement error is relatively low, compared to indoor localization systems only using the RF signal. However, in order to deploy such localization systems in large indoor environments, many more beacons (the associated functionality is very similar to that of GPS satellites) are required, compared to indoor localization systems only using RF signals. It is expected that this major disadvantage of indoor localization systems using both RF and ultrasonic signal can be overcome, since wireless sensor networks will be deployed in most intelligent buildings in the near future and the cost of sensor nodes consisting of wireless sensor networks is much lower than that of IEEE 802.11 wireless LAN or UWB nodes.
In [6], a middleware platform built on WUSB over WBAN hierarchical protocol for wearable health-monitoring systems (WHMS) is proposed. The proposed middleware platform is composed of the new hierarchical MAC, time synchronization, and a localization solution. The presented localization solution in [6] is a trilateration method. But this method is a basic technique in the research area of distance estimations. Furthermore, the proposed WUSB over WBAN MAC included the only beacon signaling and resource allocation schemes.
3. Hibernation Middleware of WUSB over WBAN Architecture
From the standards of WUSB, WBAN, WiMedia D-MAC [4, 5], and the proposed WUSB over WBAN hierarchical protocol [6], we propose a hibernation middleware of WUSB over WBAN architecture for BSNs. In the WBAN beacon frame of Figure 1, the sender address field is set to the IEEE MAC address of the WBAN hub sending the current beacon. The beacon period length field is set to the length of the current beacon period (superframe) in units of allocation slots. It is set to 0 to encode a value of 256 allocation slots. The allocation slot Length field is set to L. The random access phase 1 (RAP1) and RAP2 start fields are set to the number of the allocation slot that starts RAP1 and RAP2, respectively. RAP1 and RAP2 Length fields are set to the length of RAP1 and RAP2, in units of allocation slots, respectively. The beacon shifting sequence, channel hopping state, next channel hop and inactive duration fields are used for interference avoidance in WBAN wireless channel environment [3].
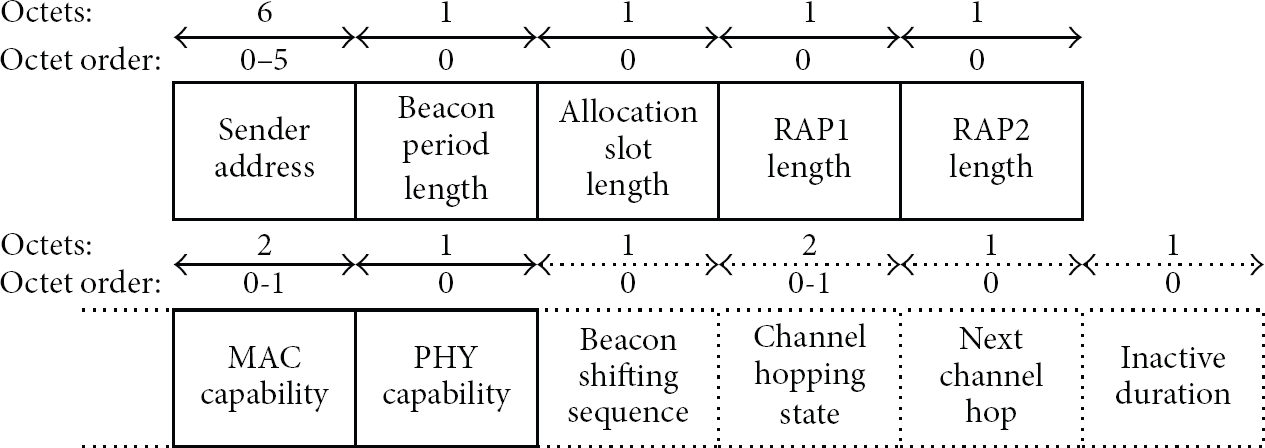
A WBAN beacon frame format.
The IEEE 802.15.6 WBAN MAC systems have several MAC capability options. Figure 2 shows current WBAN MAC capability format standard. We denote the WUSB slave device which also performs the WBAN slave device function as WUSB/WBAN slave device. The WUSB/WBAN slave devices keep their active mode during an entire superframe if the always active field is set to one in the received beacon in that superframe. Otherwise, if the always active field is set to zero, the WUSB/WBAN slave devices keep their active mode during only the beacon period and other allocated periods for that superframe. This operation is called as the hibernation.

WBAN MAC capability format standard.
The duty cycle and length of the hibernation in the IEEE 802.15.6 WBAN systems can be varied according to the WBAN system requirements. If a WUSB/WBAN slave device wants to sleep during several superframes, it sets the wakeup period field in the connection request control frame and sends the connection request control frame to the WUSB/WBAN host as in Figure 3. If the value of wakeup period field is equal to m, it means that the slave device sleeps during m-1 superframes and turns into active mode at the mth superframe. The wakeup phase field in the connection request control frame indicates the sequence number of superframes where the device turns into active mode. After receiving the connection request control frames from WUSB/WBAN slave devices, the WUSB/WBAN host has to store information of wakeup period and wakeup phase fields. But, values of wakeup period and wakeup phase fields in the connection assignment control frame which the WUSB/WBAN host sends to devices do not need to be the same with those in the connection request control frames. That is, this operation means that the WUSB/WBAN host can control the duty cycle and length of the hibernation according to the status of IEEE 802.15.6 WBAN networks.
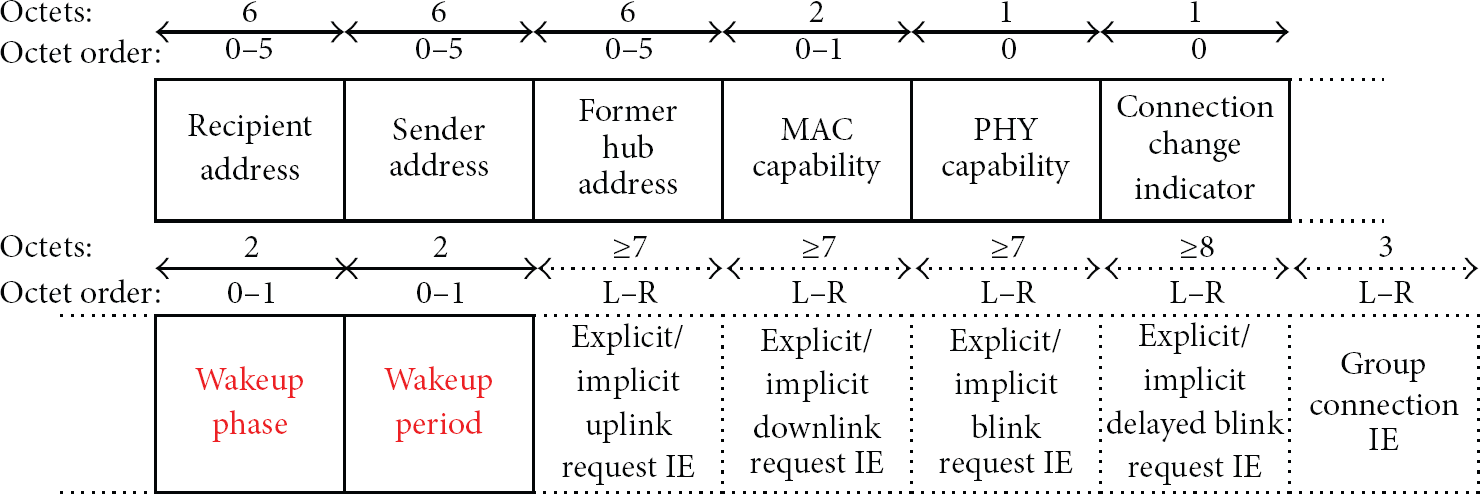
Connection request control frame format.
If the wakeup period field in the connection assignment control frame which the WUSB/WBAN host sends is set to a nonzero value, it means that the host assigns the m-periodic allocation to its slave devices. Otherwise, the wakeup period field in the connection assignment control frame is set to one; it means that the host assigns the 1-periodic allocation to make slave devices alive at every superframe. At the m-periodic allocation, WUSB/WBAN slave devices receive and transmit frames after m-1 superframes. Through the hibernation technique, the WUSB over WBAN hierarchical network turns into active mode during only predetermined superframes. At the case of m-periodic allocation, the WUSB/WBAN hierarchical network only stays in the active status during T/m time for entire T time. Therefore, the hierarchical network saves power consumption during (T−T/m) time for entire T time. Except the RAP1 period, length of the other periods can be set to zero. By using this feature, the WBAN host which also performs the function of WUSB host allocates the WUSB private channels at the RAP2 period.
Figures 4 and 5 show WUSB private channel allocation scheme at the m-periodic allocation hibernation of a WBAN superframe. At the m-periodic allocation hibernation, there are m-1 inactive superframes. In this method, the WUSB private channels are allocated during the inactive periods to improve channel utilization.

WUSB private channel allocation at the m-periodic allocation hibernation.

WUSB private channel allocation procedure at the m-periodic hibernation.
4. Hybrid Short Distance Estimation for BSNs
Time of arrival (ToA) uses the travel time from the transmitter to the receiver or time of flight (ToF) to measure the distance between the two. In order to properly localize with ToA, there must be at least three sensors. When the distances from three different sensors are known, the location can be found at the intersection of the three circles created around each sensor with the radius being the distance calculated. Imperfect measurements create a region of uncertainty between each of the sensors in which the transmitter might be contained, as shown in Figure 6(a) [17].

ToA and TDoA localization schemes.
Since ToA relies on the difference between the time of arrival and time of departure, all receivers and transmitters must be synchronized, so there is no error in the difference due to clock offsets. This may prove to be a problem, especially considering the high speed at which the signals travel. Also, as with any time sensitive systems, there is also the possibility of significant hardware delays that must be accounted for to calculate the correct distances.
The distance from the mobile target to the measuring unit is directly proportional to the propagation time. In order to enable 2D positioning, ToA measurements must be made with respect to signals from at least three reference points, as shown in Figure 6(a). For ToA-based systems, the one-way propagation time is measured, and the distance between measuring unit and signal transmitter is calculated. In general, direct ToA results in two problems. First, all transmitters and receivers in the system have to be precisely synchronized. Second, a timestamp must be labeled in the transmitting signal in order for the measuring unit to discern the distance the signal has traveled.
Time difference of arrival (TDoA), shown in Figure 6(b), uses multilateration or hyperbolic positioning to locate the intruder [8, 9]. It is very similar to ToA in that it uses the travel time from the transmitter to the receiver in order to measure distances. Instead of using the travel time from each receiver to find the distance between the transmitter and receiver, the difference in travel times from each sensor is used to find the distance between each sensor. This method leads several hyperbolas meet at a point indicating location of the transmitter. Similar to ToA or any other time-based methods, synchronicity must exist in order for different time measurements to be accurate. However, since TDoA does not use the distance between the transmitter and the receiver, the transmitter is not required to be in sync with the sensor. Synchronicity is only required between all sensors since the calculation is based on their time/distance difference [17].
The idea of TDOA is to determine the relative position of the mobile transmitter by examining the difference in time at which the signal arrives at multiple measuring units rather than the absolute arrival time of TOA. For each TDOA measurement, the transmitter must lie on a hyperboloid with a constant range difference between the two measuring units. A 2D target location can be estimated from the two intersections of two or more TDOA measurements, as shown in Figure 6(b). Two hyperbolas are formed from TDOA measurements at three fixed measuring units (R1, R2, and R3) to provide an intersection point, which locates the target beacon [17].
Frequency difference of arrival (FDoA), shown in Figure 7(a), estimates the location of a target by measuring variation of received frequency which is caused by variation of the relative moving speed between the target device and its correspondent receiver. If the relative moving speed between the target device and its correspondent receiver is equal to zero, the TDoA localization scheme can be used. However, if the target device moves or its correspondent receiver moves, the FDoA localization scheme is more pertinent because the location of a target and its moving speed are obtained through the FDoA localization process. By using the location information at multiple time points through the TDoA localization process, the moving speed of a target device can be obtained. However, the FDoA localization process computes the moving speed of a target device at one time faster than TDoA.
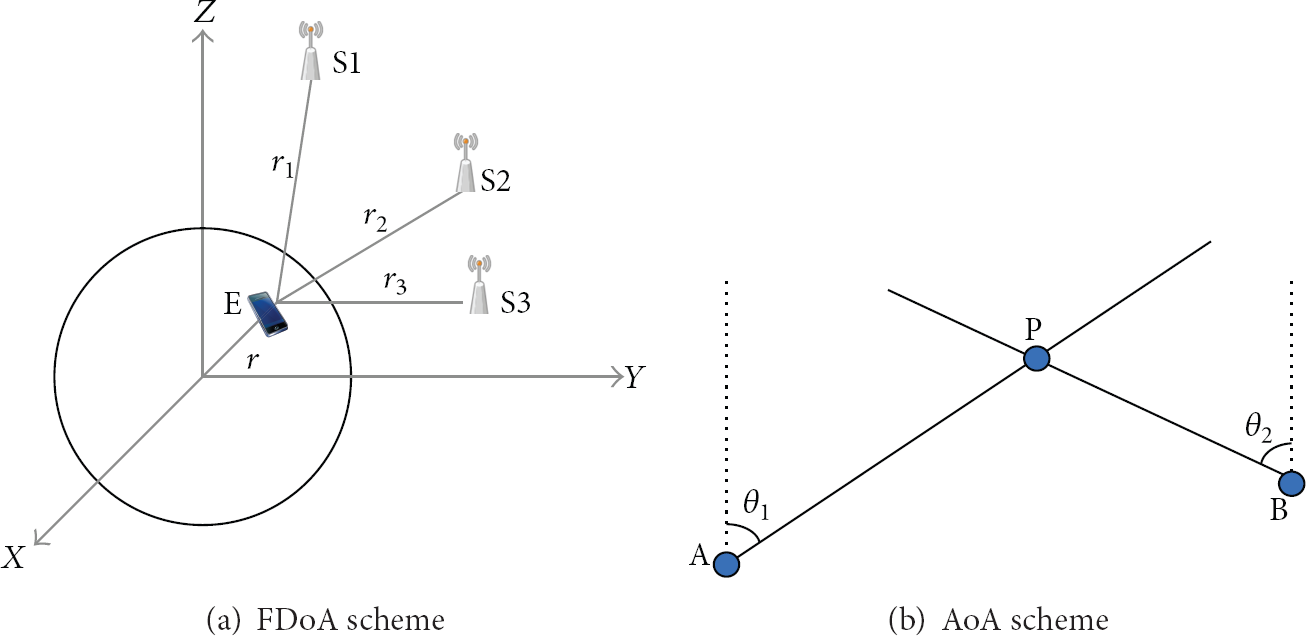
FDoA and AoA localization schemes.
In angle of arrival (AOA) scheme, the location of the desired target can be found by the intersection of several pairs of angle direction lines, each formed by the circular radius from a base station or a beacon station to the mobile target. As shown in Figure 7(b), AOA methods may use at least two known reference points (A, B) and two measured angles θ1, θ2 to derive the 2-D location of the target P. Estimation of AOA, commonly referred to as direction finding (DF), can be accomplished either with directional antennae or with an array of antennae [17].
The advantages of AOA are that a position estimate may be determined with as few as three measuring units for 3D positioning or two measuring units for 2D positioning and that no time synchronization between measuring units is required. The disadvantages include relatively large and complex hardware requirement and location estimate degradation as the mobile target moves farther from the measuring units. For accurate positioning, the angle measurements need to be accurate, but the high accuracy measurements in wireless networks may be limited by shadowing, by multipath reflections arriving from misleading directions, or by the directivity of the measuring aperture. Some literatures also call AOA as direction of arrival (DOA) [17].
In this paper, three typical location estimation schemes of TDoA, FDoA, and AoA are analyzed through comparison of experiment results to propose optimal short ranging solution. The optimal short ranging solution is executed at each body sensor node on the basis of WUSB over WBAN protocol. And the WBAN host interprets status and motion of the body-sensor objects. Figure 8 explains procedures for WUSB private channel reservation, time synchronization, and ranging in WUSB over WBAN protocol. In Figure 10, an RM means ranging measurement message. An RMRQ means ranging measurement request message. And an RMR denotes ranging measurement response message.

Procedures for WUSB private channel reservation, time synchronization, and ranging in WUSB over WBAN protocol.
5. Test-Bed Implementation
We have built a WUSB over WBAN test bed for the BSN workspace shown in Figure 9. In this paper, three typical location estimation schemes of TDoA, FDoA, and AoA are analyzed through comparison of experiment results to propose optimal short ranging solution. Each ranging solution is executed at each body sensor node on the basis of WUSB over WBAN protocol. The WBAN host uses time, frequency, and angle differences of each localization technique between the arrivals of the signals and estimates its distance from each WUSB/WBAN bio-sensor device. The estimated distances are passed to the context-aware BSN server, which computes the location of the WBAN biosensor device using the distances. BSN application service is requested by providing the WUSB/WBAN host with the user's location information.

Test bed for location measurement.

Sensor nodes: (a) main module, (b) sensor module, (c) localization sink: I/O interface module attached to main module.
Figure 9 presents the test bed used to perform location measurement experiments for performance evaluation. The test bed consists of 6 zones having 12 sensor nodes. The area of a zone is 50 cm by 50 cm, and all zones have the same area size. A zone is further divided into 25 grids, having area of 10 cm by 10 cm. At corners of each zone, sensors are attached to the top of plastic bars having 1 m height (black boxes in Figure 9). In addition, there is a receiver attached to a radio control car in the test bed.
Figure 10 presents the hardware components of the system such as main module, sensor module, and I/O interface module. The WUSB/WBAN host has a main module. The WUSB/WBAN bio-sensor has a sensor module. And a localization sink is composed of a main module and an interface module. An Atmel ATmega128L MCU with 128 KB program memory and Chipcon CC2420 RF transceiver for the main module is used. Two 1.5 Volts AA batteries are used to supply power to the main module and the sensor module. The localization sink is connected to the BSN host computer or PDA using the USB or RS-232C interface.
Although our miniaturized test bed is hard to be applied directly in a body area environment, we constructed it for the sake of convenient performance evaluation. Therefore, if the height of a WUSB/WBAN sensor node is 2.5 m, the possible size of grid unit area is about 2 m by 2 m. In experiment with a WUSB/WBAN sensor node positioned at the height of 2.5 m, we checked that the maximum possible size of unit area is 2.5 m by 2.5 m.
In Figure 11, we have shown the hardware structure of the applied time-synchronization system [18]. As is known from Figure 11, the proposed time-synchronization system is formed as a clock formation class (including the GPS receiver, CPU, FPGA, RF Frontend, DAC, ADC, and Ethernet).

Applied time-synchronization hardware structure.
The wireless data link uses the software defined radio (SDR). The reason for applying an RF transceiver of the SDR is because it is difficult for the RF transceiver to control the timing in the hardware and difficult to avoid the occurring delay change [18]. When using the SDR-based RF transceiver, the performing of time stamping is possible, and it can minimize the delay change in the two-way data link. The wireless modem performed in the FPGA and in the part that is not is processed in the high-speed CPU (or DSP) as software; while the time synchronization system supports the Ethernet outside of the wireless data link and makes the time synchronization possible, using the IEEE1588 PTP protocol. In terms of convenience, the CPU used the TI DSP processor which has a high-speed DSP core and an ARM RISC core. The TI DSP processor makes the high-speed signal processing easier, and it provides TCP/IP protocol stack support [18].
6. Results and Discussion
Performance of the proposed BSN scheme is evaluated through NS2 simulations with WBAN PHY/MAC simulation parameters and the applied hardware implementation [19–24]. In the simulation and hardware implementation, the network size is 2.5 m*2.5 m. One WUSB/WBAN host and four WUSB/WBAN bio-sensor nodes with CCA function turned on are deployed into the workspace area. WBAN frame size is fixed to 4095 bytes. And WBAN PHY and hibernating MAC parameters used in this experiment are shown in Algorithms 1 and 2. For BSN evaluations, WBAN medical and nonmedical service traffic parameters in Tables 1 and 2 are applied in this experiment.
WBAN medical service traffic parameters.

WBAN nonmedical service traffic parameters.

/* We will try to connect to this BAN if our scheduled access length * is NOT set to unconnected (−1). If it is set to 0, it means we are * establishing a sleeping pattern and waking up only to hear beacons * and are only able to transmit in RAP periods. */ if (scheduledAccessLength >= 0) { // we are unconnected, and we need to connect to obtain scheduled access // we will create and send a connection request BaselineConnectionRequestPacket *connectionRequest = new BaselineConnectionRequestPacket( request packet // This block takes care of general header fields setHeaderFields(connectionRequest,I_ACK_POLICY,MANAGEMENT,CONNECTION_REQUEST); // while setHeaderFields should take care of the HID field, we are currently unconnected.- beaconTxTime - GUARD_TIME // We want to keep this state, yet send the request to the right hub. connectionRequest->setHID(BaselineBANBeacon->getHID()); // This block takes care of connection request specific fields connectionRequest->setRecipientAddress(BaselineBANBeacon->getSenderAddress()); connectionRequest->setSenderAddress(SELF_MAC_ADDRESS); // in this implementation our schedule always starts from the next beacon connectionRequest->setNextWakeup(BaselineBANBeacon->getSequenceNumber() + 1); connectionRequest->setWakeupInterval(scheduledAccessPeriod); //uplink request is simplified in this implementation to only ask for a number of slots needed connectionRequest->setUplinkRequest(scheduledAccessLength); connectionRequest->setByteLength(BASELINEBAN_CONNECTION_REQUEST_SIZE); // Management packets go in their own buffer, and handled by attemptTX() with priority MgmtBuffer.push(connectionRequest); trace() << }
In the simulation for Figure 12, there are four WBAN data streams between WUSB/WBAN host and its WBAN slave devices in a WBAN cluster. In that situation, each WUSB device enters into that cluster and associates with the WUSB/WBAN host, one by one, to communicate. When a request for WUSB data transmissions occurs at the WUSB host or WUSB slave devices in the WUSB/WBAN cluster, the WBAN host which also performs the function of WUSB host allocates the RAP2 period for WUSB private channels. As the number of WUSB slave devices increases, the WUSB transactions also increase. Then, the allocated RAP2 periods to WUSB channels become longer. As a result, the data transmission period available to non-WUSB WBAN traffic becomes shorter. Therefore, this phenomenon leads non-WUSB WBAN devices to have longer scheduling delay and consume more energy. In this simulation, the wakeup period is set to four in the m-periodic hibernation scheme. And the consumed energy does not change up to five WUSB devices so that the energy consumption per device decreases than the normal WUSB over WBAN MAC and that with time-sync middleware for both medical and non-medical services. This result is caused by the mechanism that the WUSB/WBAN host allocates the inactive periods for WUSB private channels by setting the beacon's RAP2 length field to the length of inactive periods while the other non-WUSB WBAN devices enter into sleep mode during four superframes repetitively.
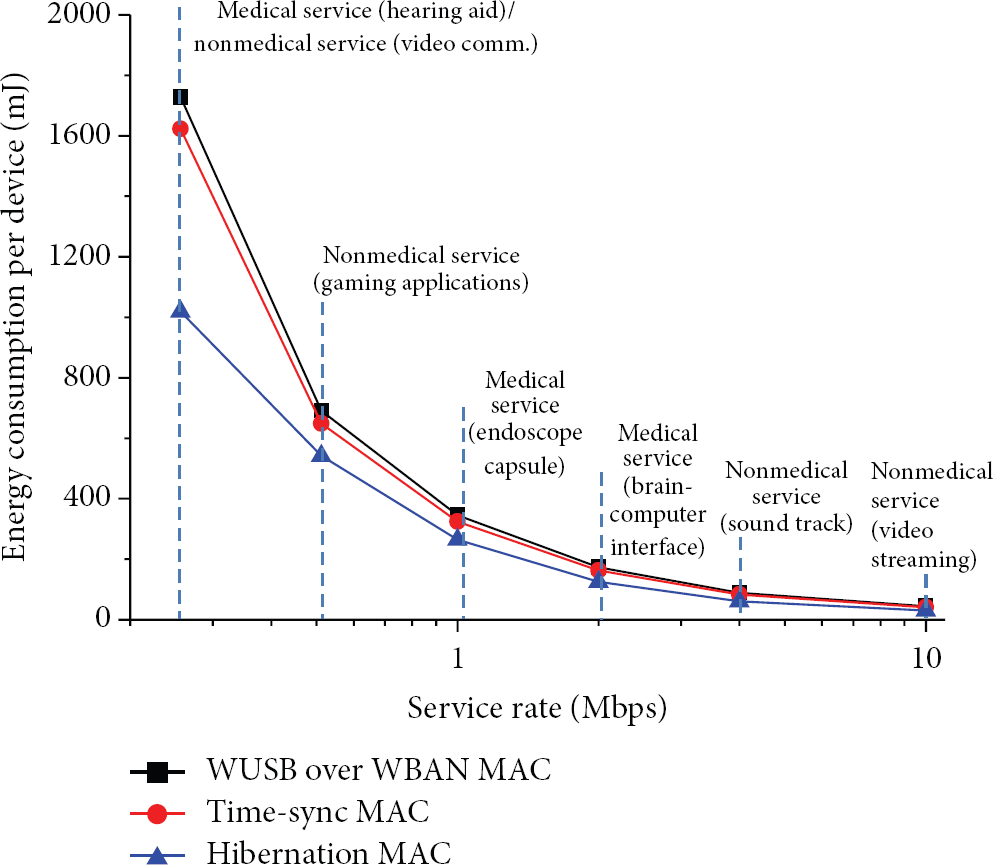
Energy consumption of WUSB/WBAN hibernation MAC for both medical and nonmedical services.
To test performances of our body-area positioning system, firstly, each localization scheme of TDoA, FDoA, and AoA schemes is simulated with the UWB ranging function in Figure 13. By using the location information at multiple time points, TDoA shows the lowest location error among other schemes. Secondly, combined schemes of the representative TDoA/FDoA and proposed TDoA/FDoA/AoA combined schemes are simulated to reduce largely location errors in the test of Figure 13. From the result in Figure 14, the combined TDoA/FDoA/AoA scheme based on UWB ranging shows location errors about 10 mm smaller than typical TDoA/FDoA scheme for short body-area positioning systems.

Location errors of each separate localization scheme according to real distance.

Location errors of each combined localization scheme according to real distance.
Finally, to reduce location errors in the test of Figure 14, the combinational schemes in Figure 14 are resimulated with the test bed combined with a fast signal processing hardware. WBAN bio-sensor nodes use the 32.768 kHz real time clock, and the frequency tolerance is set to ±20 ppm. We performed measurements on the BSN test bed. A WBAN bio-sensor node acts as the reference node. Another WUSB/WBAN host node acts as the sink node which is connected to BSN server and gathers information about the other WBAN bio-sensor nodes’ synchronization error values. We measured the synchronization errors between the reference WBAN bio-sensor node and the other WBAN bio-sensor nodes.
In the test bed, distances between WBAN bio-sensor nodes and WUSB/WBAN host node are obtained in an asynchronous mode. All WBAN bio-sensor nodes use a 16-bit timer, and the location of a WBAN bio-sensor node is computed at 10 Hz. For a fixed position of the WUSB/WBAN host, the distance from a WBAN bio-sensor node is measured by hand. Then, the distance is estimated in the test bed. In this result of Figure 15, it shows that a fast signal processing hardware must be combined in addition to the optimal ranging algorithm for more precise location change estimation to fully support real-time applications.

Location errors of each combined localization scheme with HW test bed.
7. Conclusion
In this paper, we proposed hibernating and short distance estimation middleware for WUSB over WBAN hierarchical protocol for BSNs. The proposed middleware platform was composed of hibernation and optimal short distance estimation solutions. Three typical location estimation schemes of TDoA, FDoA, and AoA were analyzed through comparison of experiment results to propose optimal short distance estimation solution. Our test results proved that the hybrid TDoA/FDoA/AoA algorithm based on UWB ranging shows best performances for wireless BSNs. However, for more precise location change estimation to fully support real-time applications, a fast signal processing hardware must be combined in addition to the optimal distance estimation algorithm. Further, many applications may benefit from accurate location-awareness built on the precise time synchronization. To fulfill such needs, the overall performances should be continuously upgraded.
Footnotes
Acknowledgments
This research was supported in part by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (MEST) (2010-0002366), in part by Mid-career Researcher Program through NRF funded by the MEST (2011-0016145), and in part by Basic Science Research Program through NRF funded by the MEST (2011-0027193).