
Abstract
Dedicated short-range communications (DSRC) are a promising vehicle communication technique for collaborative road safety applications (CSA). However, road safety applications require highly reliable and timely wireless communications, which present big challenges to DSRC based vehicle networks on effective and robust quality of services (QoS) provisioning due to the random channel access method applied in the DSRC technique. In this paper we examine the QoS control problem for CSA in the DSRC based vehicle networks and presented an overview of the research work towards the QoS control problem. After an analysis of the system application requirements and the DSRC vehicle network features, we propose a framework for cooperative and adaptive QoS control, which is believed to be a key for the success of DSRC on supporting effective collaborative road safety applications. A core design in the proposed QoS control framework is that network feedback and cross-layer design are employed to collaboratively achieve targeted QoS. A design example of cooperative and adaptive rate control scheme is implemented and evaluated, with objective of illustrating the key ideas in the framework. Simulation results demonstrate the effectiveness of proposed rate control schemes in providing highly available and reliable channel for emergency safety messages.
1. Introduction
Road traffic safety causes huge economic and productivity loss every year. During the last decade, road safety systems have been extensively studied to actively prevent accidents or passively minimize the consequences of accidents. With significant advances in wireless communications and mobile ad hoc networking [1], vehicular network based collaborative safety applications (CSA) have been widely considered as a key solution to road safety problems. With assistance of vehicle to vehicle (V2V) and/or vehicle to infrastructure (V2I) communications collaborative safe driving may be achieved based on the obtained complex traffic and road situation information.
There could be a number of ways to support V2V communications, for example, by direct short-range radio communication or through satellites or cellular base stations. An example of vehicle network built on both direct and indirect V2V communications is shown in Figure 1, in which direct V2V communications are enabled with 802.11-like short-range radio for vehicles within a local vicinity. Vehicles equipped with short-range radio can also communicate with a roadside unit (RSU) in range. Alternatively, indirect communications can be provided by commercial communication systems, for example, wide area networks (WANs) using satellite or 2 G/3 G cellular base stations (BS) or metropolitan area networks (MANs) such as WiMAX (IEEE 802.16) [2–4]. Considering that useful safety information is usually limited to the local area around a vehicle and may be exchanged frequently, direct V2V communications are much more cost-effective compared to indirect V2V communications for large-scale vehicle safety applications. Messages exchanged by indirect V2V communications encounter unnecessary and potentially excessive delays, which makes indirect V2V communications not the best candidate for real-time safety applications. On the other hand, direct V2V communications will outperform for CSA in terms of both communication performances and cost.
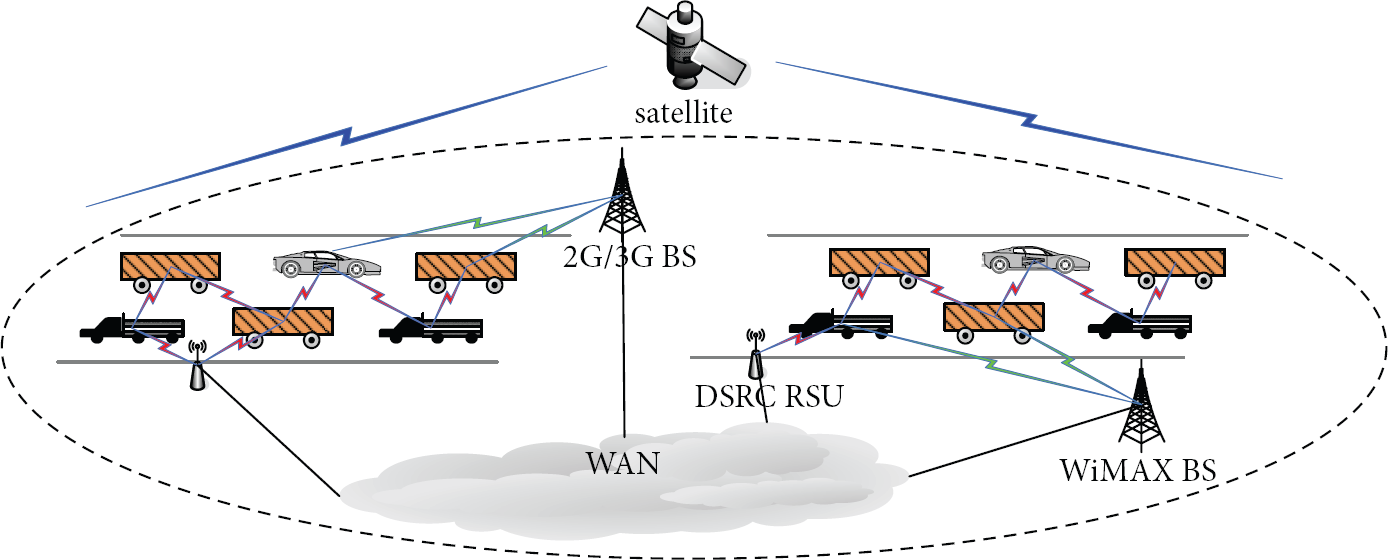
An example of vehicle networks utilizing hybrid vehicle communication technologies.
Among direct V2V communication technologies, dedicated short-range communications (DSRC) have been regarded as the most promising technology [5, 6]. It can complement cellular communications by providing very high data transfer rates, especially important when the applications require low communication latency and relatively small communication zones. The technology is expected to be robust and affordable for large-scale vehicle networks [5–7]. DSRC has been designed to provide both road safety (e.g., collaborative collision warning and collaborative collision avoidance) and commercial services (e.g., navigation, map and Internet access) [8–11]. The main issues related to the DSRC vehicular networks have been focused on channel model and mobility models [10], routing [12], broadcasting [13, 14], security and privacy, QoS support [15, 16], and system performance evaluation by analytical, simulation, and field test approaches [17–21]. With regard to collaborative safety applications, more concerned issues are broadcast schemes, power control and congestion control, and QoS provisioning. Compared to nonsafety applications, road safety applications are known to have strict requirements on reliable and real-time message delivery. Excessive message delay or message loss can cause unexpected negative consequences. The challenge coming from the collaborative safety applications is exaggerated by the fact that the MAC layer of DSRC technology is based on IEEE 802.11p distributed coordination function (DCF) [22]. With the random channel access specified in the IEEE 802.11 MAC it is hard to achieve deterministic QoS guarantee, even with the enhanced QoS service differentiation mechanisms in IEEE 802.11e [18, 23].
Although a lot of research efforts have been contributed to the individual research problems mentioned above for collaborative safety applications, it is noted that from the system point of view, there are still many research issues to be solved for comprehensive QoS control of vehicle networks before DSRC network based CSA can be assured to be practically useful. These research issues include but are not limited to the following list: (1) What level of QoS can be realized for DSRC in dynamic vehicle networks? (2) How to adaptively control the QoS of DSRC-based vehicle networks for CSA? (3) How effective are the QoS assurances provided by vehicle networks to CSA services? The first question has been widely studied in the literature by simulations and field tests. Those results show that the QoS assurances in DSRC vehicle networks can be a problem under stressful traffic conditions. The second and the third ones are still open issues. To the best of our knowledge, no effective solution has been reported yet for systematic QoS control of DSRC vehicle networks for CSA. In this paper, we are motivated to propose a QoS control framework for DSRC vehicle networks, aiming to provide some insights into the design of effective QoS support schemes for CSA. Next We briefly overview CSA applications and DSRC technology in Section 2. The challenges faced by QoS control in DSRC vehicle networks are discussed in Section 3. Section 4 presents a QoS control framework which exploits feedback and cross-layer design. A design example of adaptive congestion control is presented in Section 5. Preliminary results are presented and discussed in Section 6.
2. Overview of Vehicle Safety Applications and DSRC
2.1. Typical Vehicle Safety Applications and Communication Requirements
The QoS provided by DSRC networks should be viewed within the context of the vehicle safety applications under consideration. It is expected that a wide range of applications including both public safety and private operations will be deployed in order to justify the costs of installing the DSRC hardware. Recently Vehicle Safety Communications Consortium participants identified 34 safety applications that may benefit or be enabled by V2V or V2R communications. These safety applications were ranked according to the estimated benefits, effectiveness, and market penetration. Below are the applications with the highest estimated benefit opportunity for the fifth year after deployment.
Near-term: traffic signal violation warning; curve speed warning; emergency electronic brake lights. Mid-term: precrash sensing; cooperative forward collision warning; left turn assistant; lane change warning; stop sign movement assistant. Long-term: cooperative collision warning; intersection collision warning.
In general safety applications have different communication patterns. For example, safety related message transmissions can be broadcast or unicast. The safety messages may be event-driven (triggered by an event) or periodic (sent automatically at regular intervals). Periodic safety applications (PSA) may transmit safety messages with different frequencies.
The QoS parameters required for safety applications may be varied as well. QoS parameters used widely to evaluate wireless communications for vehicle safety applications include maximum required communication ranges, minimum throughput, maximum allowable latency, and allowable message failure rate. The maximum required communication range is the effective communication distance for a transmission to support a particular application (e.g., 300 m). Maximum allowable latency is an upper bound on the tolerable delay from the instant that a message becomes available for transmission to the instant it is received at the peer safety application layer (e.g., 30 millisecond).
2.2. Multichannel Operation
Next we give a brief overview of the multichannel operation mechanism specified in the IEEE WAVE system for DSRC. The overall WAVE architecture includes IEEE 802.11p MAC and PHY standards and IEEE 1609.1 to 1609.4 standards (for resource management, security architecture, networking service, and multichannel operation, resp.). IEEE 802.11p uses essentially the same physical layer as 802.11a but operates in a 10 MHz wide channel instead of 20 MHz.
Multichannel operation is a distinctive feature of DSRC technology. In North America, the spectrum allocated to DSRC services in the 5.9 GHz licensed band is divided into seven channels, as shown in Figure 2(a). Channel 178 is the control channel (CCH) used exclusively for road safety messages and service announcements. The others are service channels (SCH), with Channel 172 dedicated for V2V communications and Channel 184 dedicated for intersections applications. SCH 174 and 176 are shared by medium-range public safety and private services, while SCH 180 and 182 are shared by short-range public safety and private services.

DSRC frequency plan and channel synchronization.
To enable multichannel coordination the IEEE 802.1609 standard for a WAVE system defines functional extensions to the IEEE 802.11 standard. The coexistence of safety and nonsafety applications is achieved through time division multiplexing (TDM). A synchronization procedure has been proposed for TDM channel coordination in the application level, for devices incapable of simultaneously monitoring the CCH and exchanging data on SCHs. In the procedure, a synchronization interval is defined which consists of a CCH interval, a SCH interval, and a guard interval, as shown in Figure 2(b). All WAVE devices need to monitor the CCH during the CCH interval. At the beginning of each scheduled channel interval, a guard interval is used to account for variations in the channel interval and timing inaccuracies. Upon startup a device monitors the CCH until it receives an announcement of service that utilizes an SCH, or it chooses to use the SCH based on received WAVE announcement frames. Clearly, the configuration of CCH interval and SCH interval has a significant impact on the QoS for safety applications as well as on the availability of spectrum resource for nonsafety applications.
3. QoS Control Issues for DSRC Networks
3.1. Research Challenges
The common safety messages for vehicle safety applications are exchanged mainly in the control channel. Here we focus on the QoS control for the safety applications over the control channel in DSRC networks. Besides the unreliable wireless channel and multichannel operation, there are many other challenges faced by the QoS control of DSRC networks, which are listed below.
3.1.1. Dynamic Road Traffic
A vehicle may be presented with different road traffic, urban intersections or highway, at different times. Vehicle traffic is hard to predict and can generate dynamic application traffic. The dynamic safety traffic can overwhelm the control channel in the absence of traffic controls. The DSRC protocols and parameter configurations should take the worse scenarios into account, but too conservative design and fixed configurations will make overall system performance suboptimal.
3.1.2. Distributed Operation
Most of the safety applications are based on direct peer-to-peer and broadcast communications. The communication operations are entirely distributed without centralized coordination or control. To prevent broadcast storms, road safety applications are designed to be noninteractive and scalable. The distributed, noninteractive nature of operations increases the difficulties of QoS control in a dynamic environment.
3.1.3. Multiple Safety Applications with Diverse and Strict QoS Requirements
We mentioned earlier that vehicle safety applications have diverse and strict QoS requirements. Providing multiple class QoS has been a trouble for wired networks for long time and is not to be easy for dynamic and capacity limited vehicle networks. Network protocols need to be adaptive tuned in order to maximize network throughput while ensuring QoS for safety applications, which further requires efficient feedback on the safety application performances. However, as safety messages are broadcasted, it is unlikely to receive quick feedback on the message delivery. Event-driven safety messages are generated sporadically, which makes the issue of statistic QoS performance feedback worse. Therefore, providing diverse QoS at the MAC layer is very challenging.
3.1.4. Distributed Congestion Control
Critical emergency safety messages require a control channel with high availability and low latency. However, channels are shared by emergency safety messages and periodic safety messages. Although supported by enhanced MAC QoS mechanisms, emergency safety messages may receive unexpectedly low QoS performances under heavy traffic conditions. Periodic safety messages need to be regulated to prevent from saturating the channel but at the same time should not be controlled too aggressively because they are essential for building mutual awareness. How to fairly and efficiently control congestion in a distributed way is very challenging.
3.1.5. Dynamic Network Topology
Due to high speed movement of vehicles, connectivity of a vehicle with its neighbors can be temporary and very short. The short connectivity makes it very challenging for vehicles to maintain stable relationships and get useful feedback of message delivery performance (e.g., message reception rate and latency).
3.1.6. Random Channel Access
The simple and robust random channel access mechanism specified in the IEEE 802.11 standards is one of the reasons for its huge market success. The random channel access mechanism continues to be the foundation of DSRC networks, but it lacks the capability to support QoS guarantees for emergency safety applications. There are many interrelated factors to be considered in the MAC layer for QoS control, for example, how to determine the transmit power to ensure a certain communication range and successful message reception ratio without generating excessive interference.
3.2. Related Work
QoS control has been extensively studied for cellular networks and general mobile ad hoc networks (MANETs). The most common control mechanisms include call/connection admission control, QoS routing, and message scheduling. However, DSRC network based vehicle safety applications are mainly characterized by broadcast communications, ad hoc networking, and strict QoS requirements. These unique features make the QoS control schemes proposed for traditional cellular networks and MANETs not direct solutions to QoS control for vehicle safety applications. QoS control for DSRC based vehicle safety application is still a relatively new research area. It can be achieved through the power control, data rate control, and reliability control. Next we review some initial research efforts towards adaptive power control and congestion control for DSRC networks.
3.2.1. Feedback-Based Power Control
Guan et al. proposed a feedback-based power control algorithm for vehicular ad hoc networks [24]. The main idea is that given a target communication range designated by a vehicle safety application, the power control algorithm should select a transmission power no greater than needed for the target range. The vehicles located beyond the target range of a message selectively send feedback to the message's sender. The sender counts the number of feedbacks received for that message and compares the number to a predefined threshold. If the number is larger than the threshold, then the transmission power is incremented by a fixed step; otherwise, it is decremented by a fixed step. The idea is simple but the main focus is to reduce power consumption. The algorithm has not considered congestion control and QoS issues. An issue of instability can arise when the channel becomes congested. Under channel congestion, the number of received feedbacks can be small due to message collisions. But the transmit power will be increased according to the power control algorithm, which in turn causes heavier channel congestion.
3.2.2. Collaborative Power Control
Mittag et al. proposed a distributed power control scheme for vehicle safety applications [25]. The design aims to ensure strict fairness for the control of periodic safety messages and leave more space for safety-critical messages. The scheme consists of three main steps.
Each vehicle creates a list for vehicles in the carrier sense range by exchanging periodic messages. Each vehicle uses a theoretic model to independently determine the maximal transmit power that can satisfy the minimal channel load requirement for all the vehicles in the list. The theoretically determined maximal transmit power is exchanged among vehicles within the transmission range. Each vehicle sets its transmit power to the minimal among the transmit powers determined theoretically by the vehicles in the transmission range.
The proposed power control scheme is collaborative and offers a high level of fairness. But a serious problem is that the maximal transmit power is determined based on theoretically computed channel load and channel load threshold. If the actual channel load is heavy, channel congestion will occur and continue on as no reaction to actual channel congestion has been considered. Another problem is that convergence speed of the proposed congestion control method can be very low in a dynamic network environment.
3.2.3. MAC Layer Blocking
To increase the responsiveness to channel congestion and provide high channel availability for safety-critical messages, an optional mechanism for controlling transmission rate has been proposed at the MAC layer in the IEEE 802.11p specification [22]. A vehicle keeps monitoring the channel. If the sensed channel occupancy time in a monitoring window is higher than 50%, low priority PSA message transmission attempts are blocked. The drawback of this so-called MAC layer blocking mechanism is that the MAC layer supports either full or zero transmission rate. Also, the conditions to unblock PSA messages at MAC layer are not discussed. The MAC layer blocking mechanism is entirely node-centric, which can not efficiently solve the congestion control problem without vehicle collaboration.
4. A Framework for Cooperative and Adaptive QoS Control
There are many system parameters that have significant impact on the QoS performance provided to vehicle safety applications, for example, transmit power, message rate, CCH interval, and broadcast message redundancy. To date the reported QoS control for DSRC vehicle based safety applications has not been efficient. An effective framework for QoS control of DSRC vehicle networks is highly needed to bring the CSA closer to practice. That framework should allow control of system parameters systematically or individually. It should also effectively cope with dynamic vehicle scenarios and maximize the QoS performance for vehicle safety applications. We propose a QoS control framework of DSRC vehicle networks for collaborative road safety applications over the control channel [26]. It is shown in Figure 3 with the following design goals:
assured high QoS for safety-critical messages; adaptivity to traffic variations; fair channel access; high spectrum utilization.
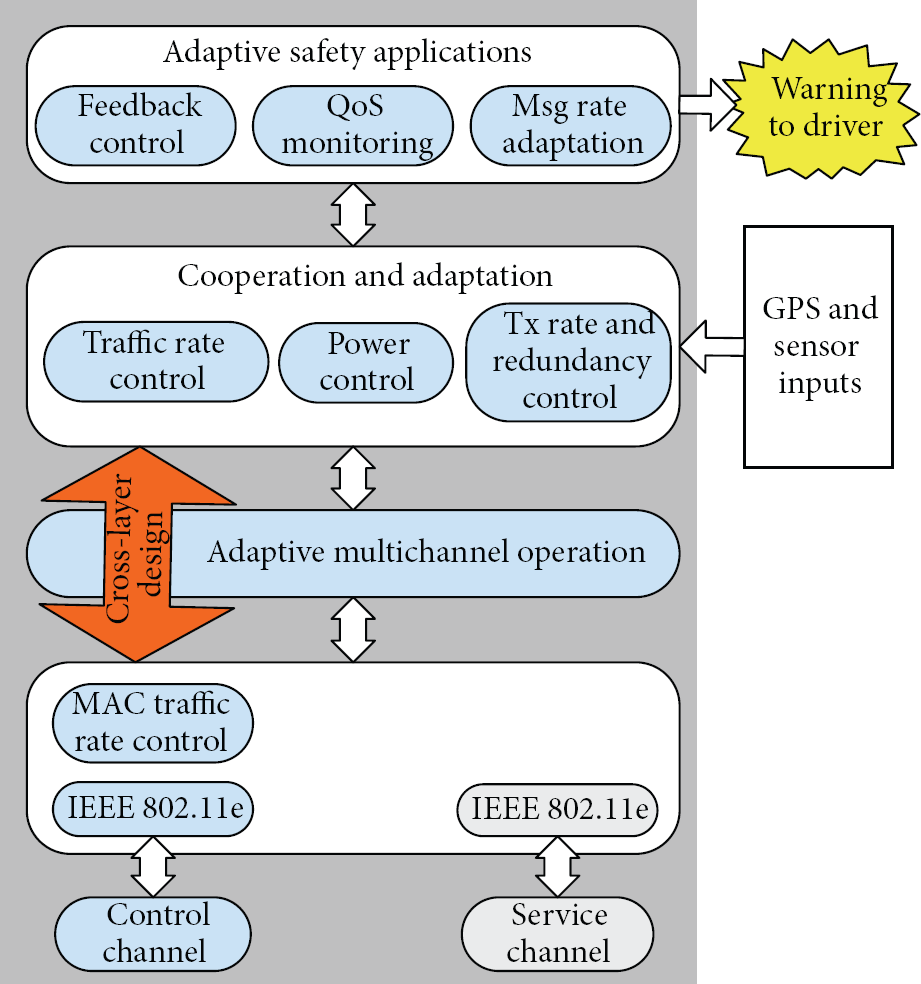
QoS control framework.
The keys in the QoS control framework to achieve the goals are systematic and cross-layer design, vehicle cooperation, and QoS adaption. As single-layer based QoS control is unlikely to successfully provide QoS for CSA, we exploit systematic and cross-layer design. Vertically the QoS control functions are implemented over three layers, namely, application layer, transport layer, and MAC layer. Horizontally vehicles cooperate with their neighbors. Feedback and channel/QoS monitoring are used for QoS adaptation in order to provide required QoS and high spectrum utilization. Three main modules are proposed in the QoS control framework with each locating in the three layers to achieve the QoS control functions: adaptive safety applications (ASA) module at the application layer, cooperation and adaptation (CAA) module at transport layer, and MAC layer message rate control (MMRC) module at MAC layer. The detailed functions and interfaces of the modules are explained in the following subsections.
4.1. Adaptive Safety Applications
The ASA module is responsible for three functions: feedback control, QoS monitoring, and message rate adaptation. Cooperation among the vehicles and adaptation of system parameters are key design considerations. Adaptivity is highly dependent on availability and accuracy of network and channel condition information. Through feedback and channel monitoring, a vehicle can calculate an approximate estimate of surrounding radio and network conditions. Each vehicle can easily monitor the channel load and the transmission activities of neighboring vehicles. But it still needs feedback from neighboring vehicles to make right adaptation and cooperation decisions. As safety applications are normally broadcast and noninteractive, it is not straightforward to provide feedback at MAC layer without significant modification on the 802.11 MAC layer specification. On the other hand, vehicle safety applications generate safety messages and request QoS from the underlying networks. The ASA module can easily provide the feedback on the received QoS for safety applications and is the ideal place to implement feedback control function.
With regard to feedback control, a device can provide feedback about the transmissions from an individual neighboring vehicle (e.g., statistical successful message receptions) as well as transmissions from all the surrounding vehicles (e.g., measured channel load). Feedback can be requested actively, or periodic feedback can be waited passively from other vehicles. Feedback can be sent in stand-alone messages or piggybacked on periodic safety messages. An issue is the trade-off between the overheads generated by feedback messages and the completeness and timeliness of feedback information.
The QoS monitoring function in the ASA module is responsible for measuring the actual QoS (such as latency and reception rate) seen by the vehicle safety applications. QoS monitoring should be performed for a relatively long time to make the monitoring results statistically meaningful. If the measured QoS performance is lower than required, the ASA module notifies the CAA module to take necessary actions such as traffic rate control and power control. Additionally the QoS measurement data are sent to neighboring vehicles upon request.
The message rate adaptation function in the ASA module is fairly simple. It informs the CAA module about the range of message rates for different vehicle safety applications. It is a task of the CAA module to determine proper message rates according to safety application requirements and channel congestion levels. The determined message rate is then sent back to the ASA module for use by vehicle safety applications for rate adaptation.
4.2. Cooperation and Adaptation
Among the three modules in the proposed QoS control framework, the CAA module plays a crucial role because it interacts with both ASA and MMRC modules. The CAA module is responsible for most of the network QoS control functions, for example, message rate control, transmit power control, selection of data rate, and message redundancy mode. Traffic rate, transmit power, data rate, and message redundancy can significantly affect the QoS seen by safety messages. Implementing these functions in the CAA module together can promote intelligent designs.
Interactions between the CAA module and the ASA module have been mentioned in Section 4.1, mainly on the exchange of feedback, QoS, and message rate information. The CAA module also has interactions with the MMRC module. As to be introduced in Section 4.3, the MMRC module is responsible for fast reaction to temporary channel congestion by blocking PSA messages at the MAC layer. Once the percentage of channel occupancy time is monitored to be more than a threshold (e.g., 50%), the MMRC module informs the CAA module about the temporary blocking of PSA messages at the MAC layer. The MMRC module also takes necessary actions if it is requested by the CAA module in case of low QoS being observed at the ASA module.
Message rate control and power control are mainly used to address channel congestion in the CAA module. Unlike the very simple message blocking function in the MMRC module, Both rate control and power control at the CAA module are much more dynamic and complex with multiple levels. According to the monitored QoS and channel load levels, the CAA module can cooperatively and jointly adjusts the power level, message rate, and other QoS control measures. A design example of cooperative and adaptive rate control will be presented in Section 5.
4.3. MAC Layer Message Rate Control
The MMRC module is located at the MAC layer to provide fast congestion mitigation. If a congestion event occurs, low priority PSA messages are blocked immediately at the MAC layer for a certain time. Message rate control at the MAC layer is quite simple with only two states, unblocked and blocked. In the unblocked state, all messages entering the MAC queue will attempt transmissions. In the blocked state, low priority PSA messages are transmitted at a low rate to update statuses (e.g., congestion state, position, speed, direction, etc.).
If a vehicle's MAC layer is blocked, a closely related issue is when the MAC blocked state should be returned to unblocked. Two MAC unblocking algorithms are suggested below.
Fixed Unblock. PSA messages are unblocked if no congestion event happens in the following
Random Unblock. A simple way to solve the synchronization problem of the Fixed Unblock algorithm is to randomize the waiting times for unblocking. For example, once a vehicle is blocked due to a congestion event, it chooses to wait for a random time in the range of
The MAC unblocking algorithms can be used alone or jointly with the transport layer algorithms for congestion control. Next we will provide a design example to evaluate the congestion control performances.
5. A Design Example
In this section, we present a design example of message rate control function in the CAA module, to illustrate some of the ideas for adaptive and cooperative congestion control described in the previous section. To facilitate the discussion, we define two channel congestion events:
a direct channel congestion event ( an indirect channel congestion event (
We further define network congestion events for the purpose of rate control. We can design so-called noncooperative and cooperative rate control schemes according to their responses to the channel congestion events. In noncooperative rate control schemes, a network congestion event is said to happen only if
After a network congestion event occurs, congestion can be mitigated by either MAC blocking in the MMRC module or rate control in the CAA module. The CAA module can adaptively control the message rate for low priority PSA. Suppose that the message rate for PSA varies in the range of [
In the next section, the above proposed message rate control algorithms will be evaluated and compared to the MAC layer message blocking algorithms.
6. Simulation Results
We implemented a discrete-event driven simulator to evaluate four DSRC rate control schemes. Two schemes are configured with a fixed message rate of 4 message per second (mps) and 8 mps and Random Unblock in the MMRC module, which are referred to as the FRRU-4 and FRRU-8 schemes, respectively. The parameter
The simulated network topology represents an urban intersection with lane length of 350 m. A configurable number of nodes were randomly placed with a uniform distribution over the lanes. IEEE 802.11p was configured with a backoff window
For the N-CRFU and CRFU schemes, the probability that a new MAC blocking event occurred during the time of MAC blocking was very low (smaller than 1%). Therefore, we can assume that the control channel was highly available for ESA messages. The performance measures of interest include how the vehicles were blocked at the MAC layer, the rate of successfully received messages, and probability of successful message reception. Figure 4 presents the network-wide average percentage of time of PSA messages being blocked at the MAC layer. The percentage of MAC blocking time was zero for FRRU-4 but increased sharply for FRRU-8 for large N due to a lack of adaptation to increased traffic load. MAC blocking time was very close for the N-CRFU and CRFU schemes and increased smoothly with N. Figure 5 presents the standard deviation of percentage of MAC blocking time. The standard deviation of MAC blocking time for the N-CRFU scheme was much larger than that for the CRFU scheme by up to 200%. The results demonstrate that the CRFU scheme can achieve fairer channel access and prevent some vehicles from remaining congested for a long time while at negligible cost for the other performance measures.

Average percentage of time after PSA messages are blocked at MAC layer.
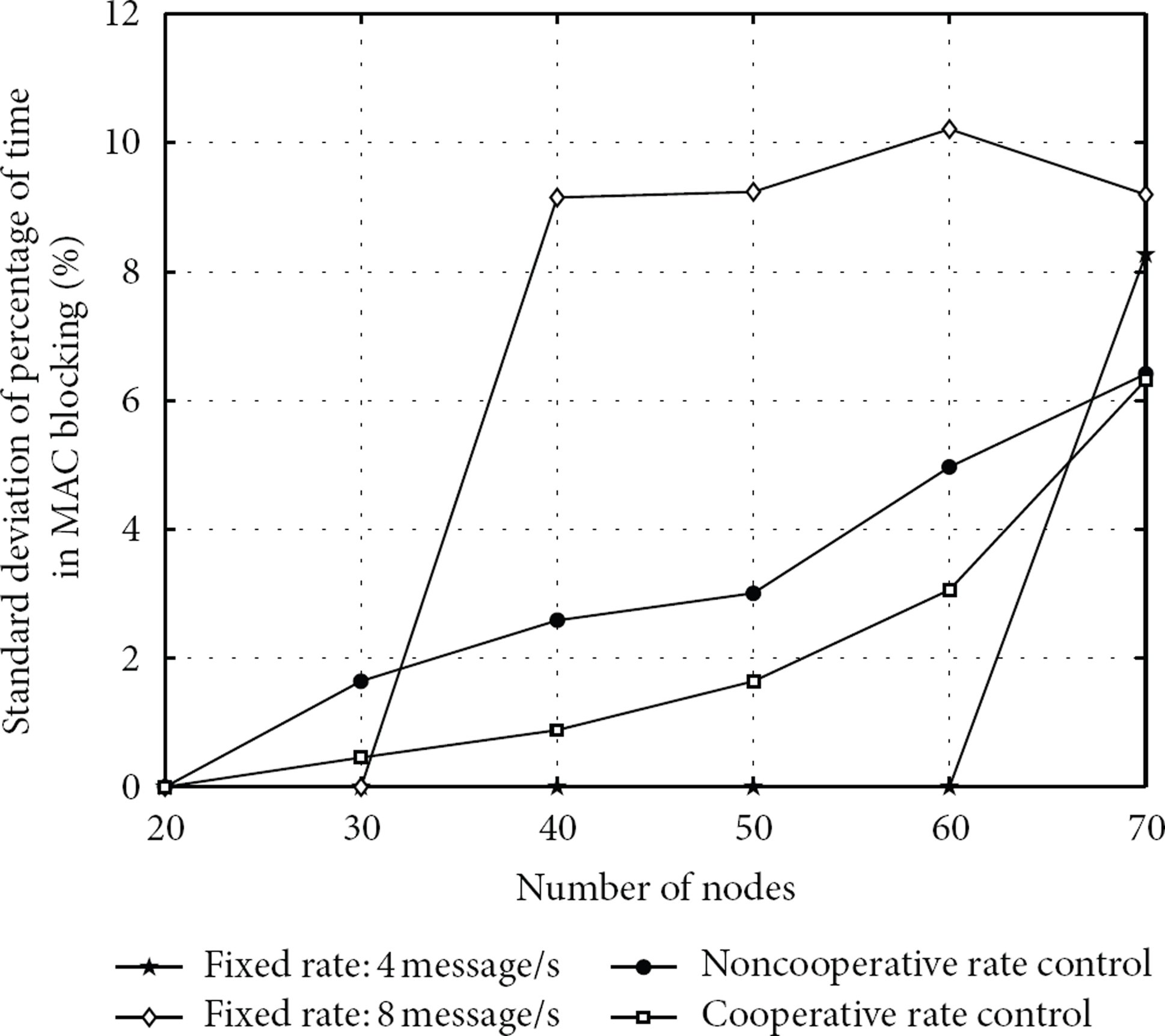
Standard deviation of the MAC blocking time for network with 70 nodes.
Figure 6 presents the average number of successfully received messages per second at each node (denoted by

Average number of successfully received messages per second.
Figure 7 presents the average probability of successful message reception (denoted by

Probability of successful message reception.
7. Conclusions
DSRC is a promising technology for road safety applications. In this paper, we studied the QoS control problem for road safety applications over large-scale DSRC-based vehicle networks. We discussed the challenging issues of QoS control in DSRC vehicles and proposed a QoS control framework to provide cooperative and adaptive QoS for road safety applications. The proposed control framework consists of three major modules: ASA module, CAA module, and MMRC module. Vehicle cooperation and cross-layer design were design principles in the modules to achieve effective and robust QoS performance.
We presented a design example on the cooperative and adaptive rate control to illustrate the key ideas proposed in the QoS control framework. Four rate control schemes (two schemes with fixed message rate and MAC layer PSA message blocking, two schemes with rate adaptation at the CAA module) are proposed and compared by simulations. Simulation results demonstrate the effectiveness of adaptive rate control at the CAA module in terms of adapting to dynamic traffic conditions. It is also observed that cooperative rate control scheme can provide fairer channel access for PSA messages than noncooperative rate control scheme.
Footnotes
Acknowledgments
The work is supported by the UK Engineering and Physical Sciences Research Council (EPSRC) with Grant reference no. EP/1010157/1 and partially supported by the National Natural Science Foundation of China (NSFC) under Grant no. 61103177.