
Abstract
We present a new adaptive method to calculate the path loss exponent (PLE) for microcell outdoor dynamic environments in the 2.4 GHz Industrial, Scientific, and Medical (ISM) frequency band. The proposed method calculates the PLE during random walks by recording signal strength measurements from Radio Frequency (RF) transceivers and position data with a consumer-grade GPS receiver. The novelty of this work lies in the formulation of signal propagation conditions as a parametric observation model in order to estimate first the PLE and then the distance from the received RF signals using nonlinear least squares. GPS data is used to identify long term fading from the received signal's power and helps to refine the power-distance model. Ray tracing geometries for urban canyon (direct line of sight) and nonurban canyon (obstacles) propagation scenarios are used as the physics of the model (design matrix). Although the method was implemented for a lightweight localization algorithm for the 802.11b/g (Wi-Fi) standard, it can also be applied to other ISM band protocols such as 802.15.4 (Zigbee) and 802.15.1 (Bluetooth).
1. Introduction
The emergence of context-aware computing applications, and location-based services and the proliferation of portable electronic devices have motivated an extensive research on the topic of node or device localization for wireless networks operating under 2.4 GHz ISM band protocols such as Bluetooth, Zigbee, and especially Wi-Fi. Localization is an important issue for the interaction between portable device users and the surrounding networked devices in intelligent environments such as homes, offices, or other intelligent buildings [1, 2].
The localization problem has been a hot research topic in the Wireless Sensor Network (WSN) and Mobile Robotics literature. According to the WSN terminology, a node is a small device with sensing, computing, storage, and communication capabilities, and the node localization problem is defined as “determining an assignment of coordinates for nodes in a wireless ad-hoc or sensor network that is consistent with measured pair wise node distances” [3]. The definition states basically that it is necessary to estimate a distance (range) between the nodes before obtaining coordinates. See [4–6] for more WSN terminology and applications.
A range estimation can be performed using collected measurements from a variety of methods such as acoustic [7–9], directional antenna or antenna array [10, 11], infrared [12], and Received Signal Strength (RSS) measurements [13, 14]. Unlike other ranging methods, RSS-based methods estimate neither distances nor positions from the angle of arrival nor traveling time of the signal. Additionally, no clock synchronization is assumed in the nodes. Only the incoming RF signal is used to infer a range to the transmitter. The basic premise is that the received signal power decay is inversely proportional to the distance. This signal power attenuation is called path loss (PL) and can be quantified by a path loss exponent (PLE). Once the ranges to the landmarks (devices with known positions) are estimated, trilateration methods can be employed to find the location of an unknown position node within a suitable coordinate system.
However, RSS levels are highly unpredictable and the formulation of a path loss model (PLM) as function of distance is a complex issue. This complexity is derived from the fact that the received power level is a combination of different signal propagation mechanisms such as reflection, diffraction, and scattering and absorption losses. Due to these impairments, which depend on the surrounding environment, shadowing and multipath fading are produced. As a consequence estimation errors can be introduced for any RSS-based localization algorithm.
In recent years, RSS-based localization algorithms have been the subject of an increasing interest due to the wide availability of 802.11b/g transceivers and the proliferation of Wireless Local Area Networks (WLANs).
This approach exploits existing WLAN infrastructure and precludes the use of additional hardware such as badges; and wearable sensors, see [15, 16]. In fact, the IEEE 802.11 standard provides the means to obtain the signal strength via the Received Signal Strength Indicator (RSSI). This indicator is defined as “a mechanism by which RF energy is to be measured by the circuitry on a wireless NIC. This numeric value is an integer with an allowable range of 0–255 (a 1-byte value)” [17]. Similar metrics are defined for the IEEE 802.15.4 and IEEE 802.15.1 standards.
The node localization algorithms within previous literature are referred to as GPS-free or GPS-less algorithms. The lack of GPS use can be explained by common drawbacks attributed to several causes such as signal availability, cost, antenna size, and energy consumption. Nowadays, some of these arguments are no longer true. GPS chips can be ubiquitously found in mobile devices such as smart phones, hand helds, and tablets. While GPS chips are available in many devices, there are still many others that do not have it. The existing GPS positioning capability could be used to estimate the PLEs of WLAN access points and the derived PLM employed to enable GPS-free location services.
In this paper we propose a PLE estimation method which uses the RSSI provided by a 802.11b/g transceiver in combination with data collected from a commercial grade GPS receiver. The method builds ray tracing models for typical propagation scenarios such as urban canyon and non-urban canyon cases, and uses them to formulate the design matrix of an observation model. The propagation scenarios take into account the shadowing and multipath effects. The observations are composed of RSSI readings and GPS data. The system of equations of the design matrix is linearized using Taylor series and then solved through least squares. The main contribution of this work is the formulation of a parametric mathematical model which improves the PLE accuracy by using the Equivalent Isotropic Radiated Power (EIRP) and Effective Antenna Aperture (EAA) parameters calculated before obtaining the PLE. A second contribution is the combination of GPS data and RSSI readings in order to identify the RSSI long term behavior.
Depending on the transmitter's power, antenna height, and coverage area, the RF environments where the devices are deployed can be classified as macrocell, microcell, and picocell. In microcell environments the transmitting power of the radios ranges from 0.1 to 1 watt, the RF coverage area ranges from 200 to 1000 m, and the transmitter's height is low (3 to 10 meters) [18]. Environments within buildings are classified as picocells. Indoor-to-outdoor configurations are environments with walls blocking the signal and are characterized by a wall attenuation factor. The algorithm proposed in this work is tailored to microcell RF environments with indoor-to-outdoor coverage configurations; therefore models such as Okumura-Hata, Lee, or Walfisch-Bertoni are not treated here. From this point forward, when we refer to a blind node, we mean a device (smart phone, hand held, tablet, or laptop) whose position needs to be estimated; when we refer to anchor or beacon or landmark nodes, we mean access points (APs) for whose position are already known.
The paper is organized as follows. Section 2 reviews the localization algorithms based on RSSI only and algorithms with RSSI-GPS collaboration. In Section 3 we present the proposed method. Section 4 presents the implantation of the method in real world conditions. In Section 5 the accuracy of the experimental results is discussed, and finally, conclusions and future work are presented in Section 6.
2. Related Work
This section is divided in two parts. The first part reviews papers related to either empirical or theoretical RSSI-based models. In the second part, techniques that rely on both RSSI and GPS to derive power-distance models for node localization are examined. Note there are other methods for RF-based localization such as fingerprinting [19, 20] and Bayesian Networks [21, 22]. These techniques and some others exclude PLE estimation and are not reviewed in this paper.
2.1. PLE from RSSI Measurements
The study of RSSI for different purposes is not a new idea. Some of these purposes are the optimization of the coverage area of wireless networks [23], assessment of links quality for multihop routing protocols [24], and so forth. The use of RSSI as a means for node localization estimation in a WLAN dates back to 2000. For example, [25] proposes the use of an Extended Kalman Filter (EKF) to cope with the noise in the measurements and to maintain a position estimate in harsh conditions. They conducted an empirical experiment to relate signal strength to distance between base and mobile stations. The shortcoming of this work is that it is designed to work within predefined surroundings, in this case an office. The accuracy is one room. In [26] authors propose a lookup-table method for node position triangulation. They also conducted data collection to empirically correlate distance to signal strength. The shortcoming of this works is that it requires an extensive survey at different points in a predefined environment and the consequent table size. In [27] authors proposed an optimal averaging window length of RSSI samples to cope with fading of the power and mobility of the nodes. By modeling the channel's fading with a Rayleigh distribution, they obtained a factor (
Although these previous works do not calculate a PLE explicitly, they formulate empirical power-distance models based on averaged RSSI measurements surveyed in specific locations. They also address some issues affecting the received power levels such as fading due to multipath, nonline of sight, node mobility, and sampling.
In the following literature review we now focus on localization systems for outdoor environments since PLE estimation was first introduced for such environments. In [28] the authors propose a methodology for PLE estimation in a WiMAX system. Although this methodology is not intended for a WLAN, it is carefully examined in this paper because of the use of common theoretical models to estimate PLE. The first part of the methodology pairs RSSI measurements, expressed in dB units, with distance (

In [29] the authors used the Okumura-Hata model to calculate two different PLEs in a WiMAX network, although the Okamura-Hata model is usually applied in macrocell environments (distances greater than 1 km). They formulated two different map-supported PLMs from RSSI observations. One PLM corresponds to an “urban canyon” area while the other for “non-urban canyon.” The developed models considered the type of area based on city map and road network information.
Note that an urban canyon area is an area where there exists an open street between the receiver and the transmitter. Therefore, the signal reaches longer distances than in areas with obstacles. On the other hand, an area with considerable obstacles is classified as noncanyon.
Next, we shall review works which estimate PLE for WLAN in indoor environments. Authors in [30] proposed and implemented a system framework which consists of a central server, a base station, and four beacon nodes. The algorithm dynamically estimates a PLE between the beacons and the blind node. The base station receives the RSS values collected by the beacons nodes and sends them to the server. The authors also employed the log-distance path loss formula, but they add a stochastic component:


Model (2) is commonly used in macrocell scenarios by setting the
2.2. RSSI Measurements and GPS Data
Some of the first applications of collaborative GPS/Wi-Fi were geocaching, wardriving, and the elaboration of signal coverage maps. Geocaching is a recreational outdoor activity in which the users seek containers with the aid of GPS receiver and mobile devices. War driving is the activity of searching Wi-Fi wireless networks in a moving vehicle, using a portable computer or other devices connected to a GPS. A signal coverage map is a map with geographic information of areas where a wireless networks are deployed. It represents signal intensity areas (strong or weak) with contour lines or colors.
In [31] the authors presented a solution for manual deployed networks called Walking GPS. It works by attaching a GPS receiver to a node called GPS mote. This node first converts its latitude and longitude coordinates into a local coordinates system and then it broadcasts its position to the rest of the nodes. When the carrier (person or vehicle) places a new node in a certain position and turns it on, the node immediately receives the broadcast packet from the GPS mote and estimates its own position. On the other hand, if a node is turning on after being deployed, it needs to ask its neighbors for their positions in order to trilaterate its own position. The main drawback of this solution is that it was tested in an ideal propagation scenario (open field environment). Moreover, the blind nodes were deployed within a predefined grid.
In [32] the authors proposed a multisensor fusion solution with data from three sources: a GPS, a radio propagation map, and a WLAN positioning system. They divided the radio map into three areas: indoor, outdoor, and shaded (a shaded area is an area surrounded by buildings or in closed places). The areas are covered by three fixed APs. The algorithm consists of two phases: offline and online. In the offline phase they collect RSSI measurements at predefined locations in the map. At these locations, they estimate the expected RSSI values using an equation similar to (3) with a reference distance of 1 meter. Calculating the ratio between the observed and the expected RSSI, they model the corresponding multipath. Based on these ratios, a polynomial fit function is computed for all the predefined locations. Using this information and trilateration, the WLAN positioning system estimates a blind node preliminary position. Finally, in the online phase the GPS is used to identify the area (indoor, outdoor, or shaded) to improve the estimated positions.
In [33] the authors presented an outdoor WiFi localization system assisted by GPS. The system uses a unidirectional Yagi type antenna to triangulate the location of APs using the angle of arrival of the received signal. The angle of the received signal is measured with a GPS compass which is rotated with the antenna and the WiFi receiver at the same time. All the equipment was mounted on a motorized rotating base. The proposed algorithm consists of the following steps: (i) place the equipment at two different measurements points
3. Proposed Solution
The models described in Section 2 express a power distance relationship based on the attenuation of the signal's power as it propagates. Such attenuation roughly obeys the inverse power law:

A suitable mathematical tool to model these propagation mechanisms and their effects on RSSI variability is ray-tracing. An electromagnetic wave (EM) is composed of electric (
The proposed method is divided into three phases. In the first phase the EIRP and PLE parameters are estimated using the observation model. In the second phase, PLMs for each landmark are formulated in order to translate RSSI measurements into ranges. In the final phase, these ranges are used to estimate the locations of one or more blind nodes. Next, each phase is described in detail.
3.1. Observation Model Formulation
The formulation of the system to infer the EIRP and PLE is expressed as follows:


Schematic diagram for phase 1.
Mathematical models expressed in matrix H relate the observations
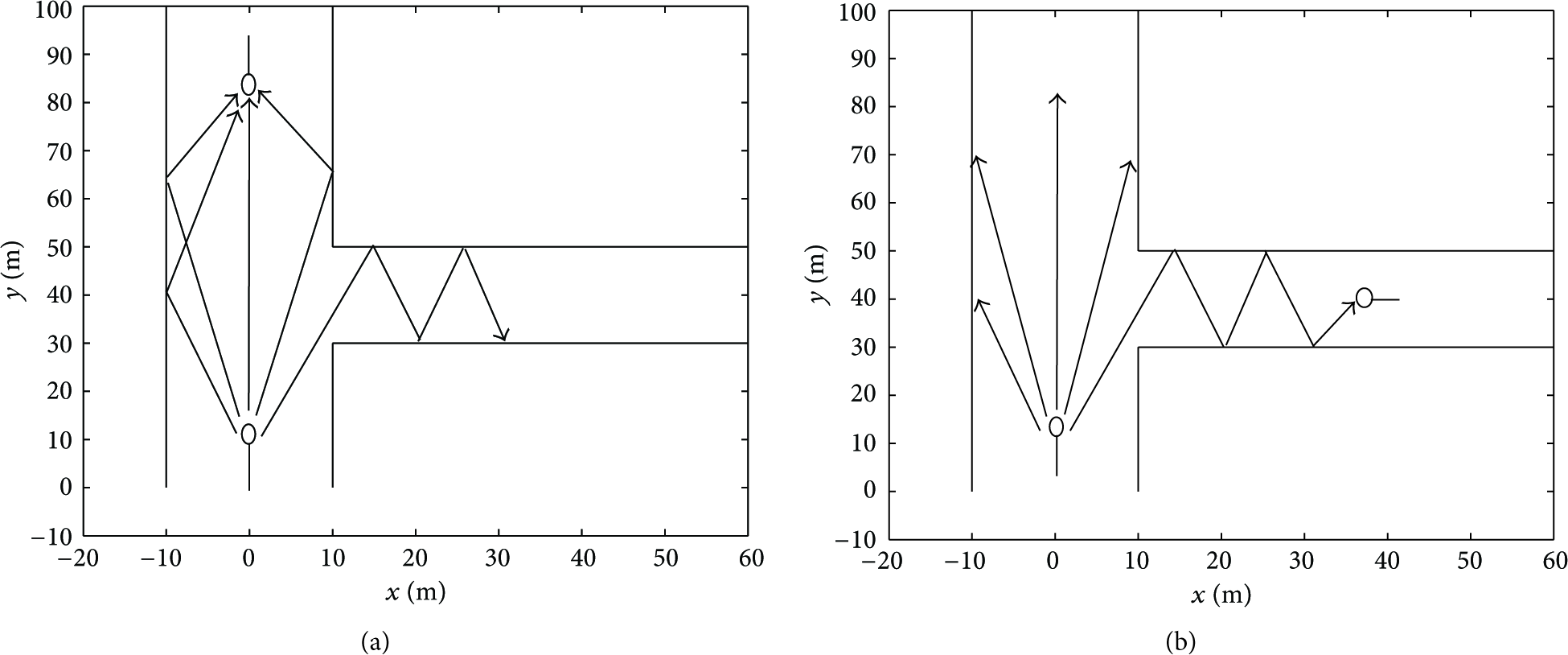
Ray tracing representation of signals traveling distances in (a) urban canyon propagation scenario and (b) nonurban Canyon propagation scenario.
The models perform the addition of direct and reflected rays and calculate the resulting received power at different points in the scenarios. This is done by calculating the average of vector

The PFD represents the field strength at the receiver's antenna (in W/m2 units) and it is defined as


Expressing (6) as a function of distance



The term

3.2. Range Estimation
After linearizing (12) using Taylor series, we apply least squares to estimate EIRP and EAA. In order to obtain a more accurate PLE, we use transmitted power,

In this formulation, the RSSI observation vector

The terms between parentheses are constant and were calculated in the previous step; therefore the parameter,
Seven APs located in the University of Calgary campus were selected as landmarks during the data collection process (Refer to Section 5 for more information) having the following service set identification (ssid): ENA_131, ENE_136 and NM_110, KNB_125u, KNB_132, MC_184, and MC_197. After the method was applied to the signal strength received from them and to the GPS data collected, a PLE and a path loss model for each one were estimated. Table 1 lists ssid, estimated PLE values, and the actual UTM coordinates for the landmarks. In this work the UTM system is employed due to its use of meters instead of degrees of latitude and longitude.
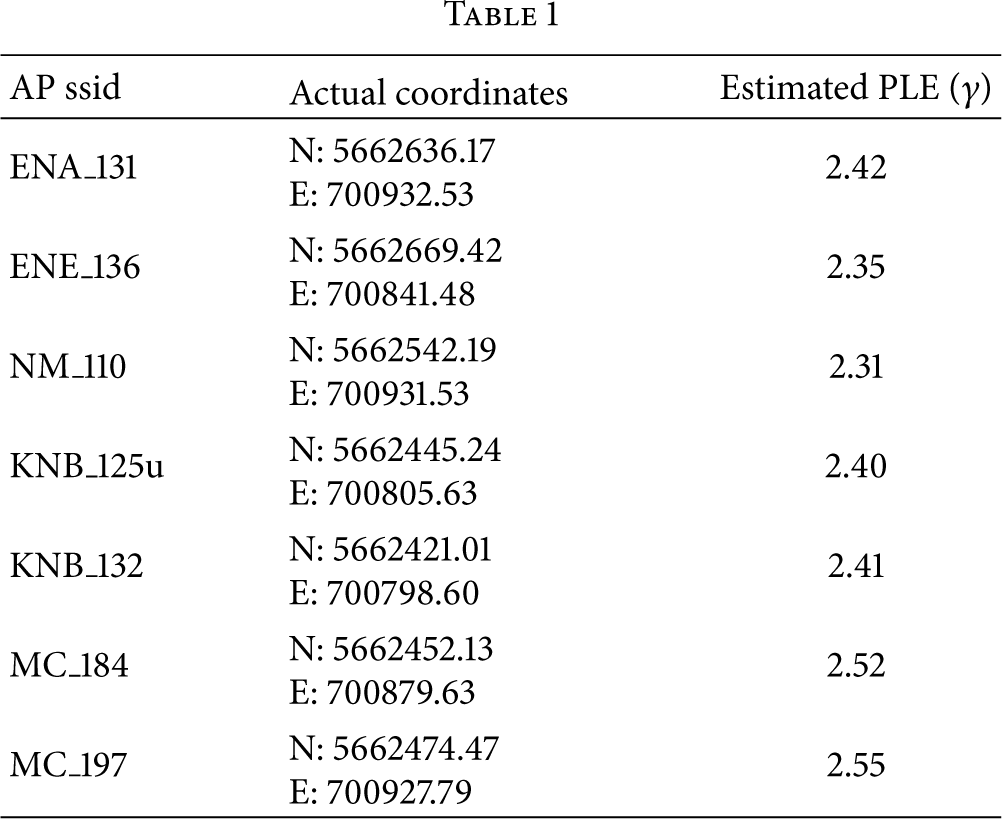
Figure 3 shows short term received power and the corresponding long term path loss model for APs: ENA_131, ENE_136, and NM_110. Figures 3(c) and 3(d) correspond to non-urban canyon and reflect more harsh propagation conditions.
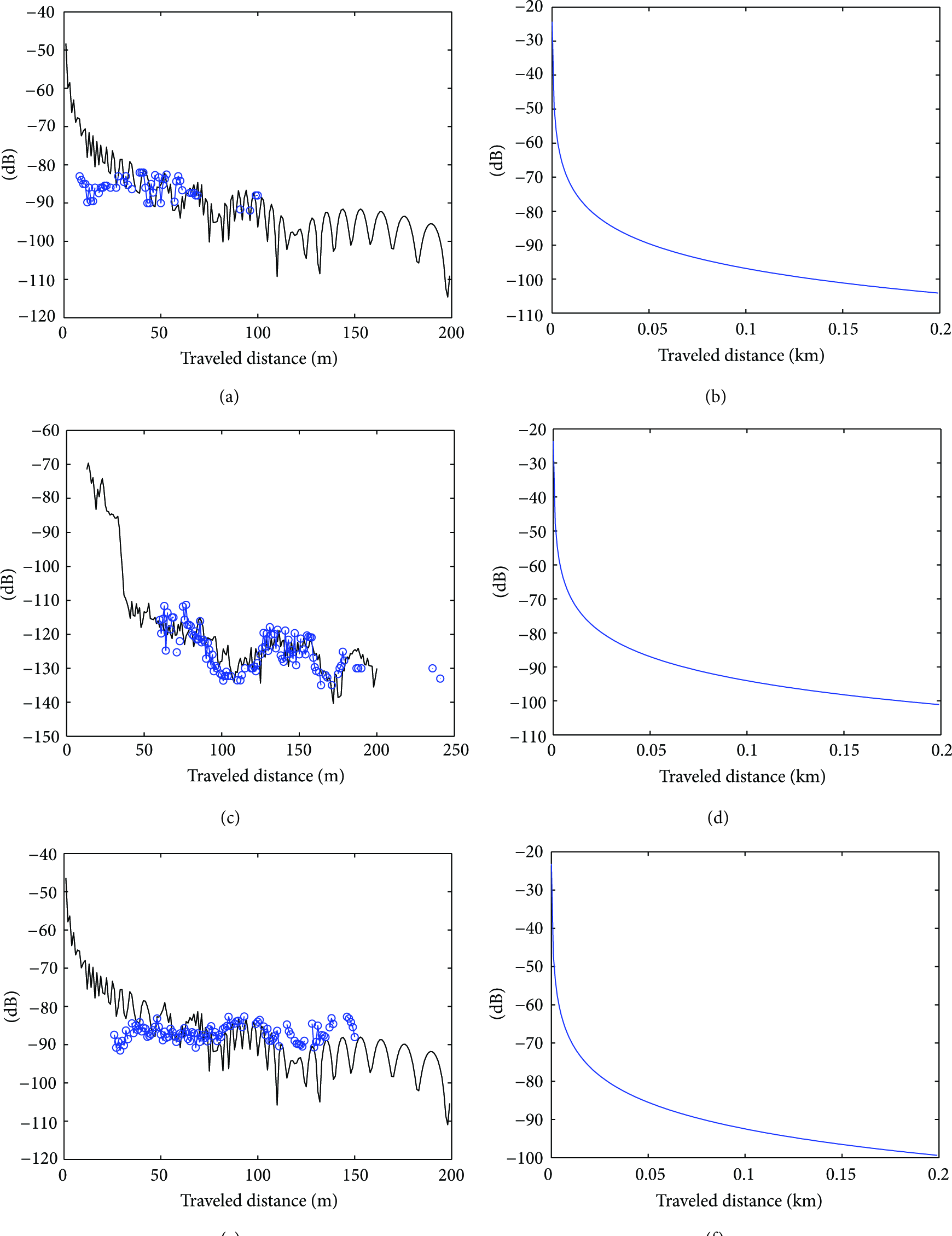
(a) AP ENA_131 short term received signal power for an urban canyon model. (b) Corresponding long term distance model with
3.3. Node Localization
In order to determine the blind node position in 2D space, n landmarks are employed. Although two landmarks would be enough, there would be two possible solutions. A third landmark reduces the estimation to a unique solution. With the ranges estimated from a blind node to n landmark APs and the coordinates of the latter, the method can formulate the following system of nonlinear simultaneous equations:


The series is truncated after the first-order partial derivatives eliminating nonlinear terms. With initial values for
For instance, with Wi-Fi only data collected at test point 5662622.36N, 700894.86E, and the PLEs and coordinates of APs ENA_131, ENE_136, and NM_110 (listed in Table 1), the following mean ranges were obtained:

One example result and visualization on Google Earth.
4. Implementation of the Method
In order to test our proposal, several experiments were performed at a university campus. The data collection process consists in recording the signal strength from nearby Wi-Fi APs. The geographic location of the points where data was collected was also logged and paired with the Wi-Fi data at rate of 3 Hz. The data collection was carried out with a laptop and a GPS Garmin model GPSmap 60CSx. In the laptop the inSSIDer program was installed and the GPS receiver was connected via USB port. The campus infrastructure consists of 1280 APs with transmission rate of 54 Mbps, maximum Tx sensitivity of +17.0 dBm, and minimum Rx sensitivity of −73.0 dBm. 87 out of 1280 APs were identified along with their geographic positions, but only seven were used in the experiments (see Table 1). The data was collected during several random walks each 15 minutes long and was carried out on August 7, 11, 15, and 29 and June 15 and 23, 2011. All tests took place within the area located between the three buildings. See Figure 4. The data was logged in the GPS eXchange format:
The <
5. Experimental Results
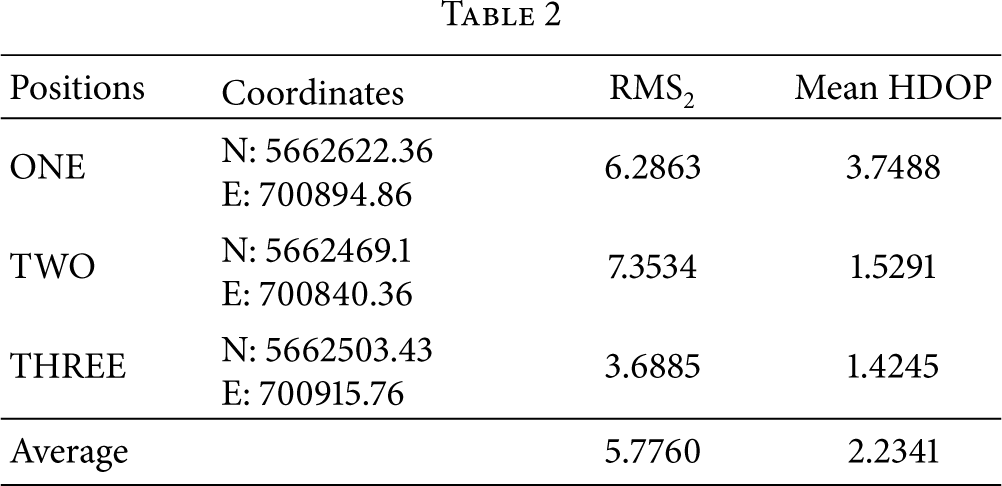
After data collection and model formulation phases, three blind node positions within the campus were selected to test our method. The coordinates of these positions are listed in the second column of Table 2. In order to evaluate accuracy of the results, Wi-Fi only readings and GPS only waypoints were collected at these positions. Note that this number of positions represents the best readings for both Wi-Fi and GPS signals in our experimental scenario. The overall PLE estimation can be improved as the number of blind node position readings is increased. However, this is subject to good quality readings.
Before evaluating results, it is necessary to select the appropriate accuracy metrics. Since this work uses a GPS receiver to infer a power-distance model, it is necessary to employ common metrics used by GPS manufacturers such as Circular Error Probable (CEP), one-dimensional root mean square (
Since the proposed localization algorithm is intended for portable electronic devices such as tablets, laptops, or handhelds, the localization takes place in a 2D map. Therefore, horizontal accuracy metric 
5.1. GPS Only Data
7963 GPS waypoints were collected at positions ONE, 6792 at positions TWO, and lastly 8340 at position THREE. These waypoints were processed in order to extract Northing and Easting coordinates and HDOP. With this information the horizontal error position with respect to the actual coordinates of position ONE, TWO and THREE was calculated. The results for metrics
5.2. Wi-Fi Only Measurements
Now, the same metrics are calculated for the WiFi only readings. In this case 5116 readings were collected at the test positions. Three landmark APs were selected for positions ONE and TWO, and only two for position THREE. Using the PLEs obtained in Section 4 for each AP, ranges to them were estimated. With the APs actual coordinates, the real ranges were calculated (listed in Table 3). Using this information, the method derived estimated positions for the three test points. The resulting rms2 and HDOP are summarized in Table 3.

Comparing Tables 2 and 3, it can be seen that the
6. Conclusions and Future Work
In this paper an adaptive method to formulate a power-distance model and infer distances to AP landmarks was proposed. The method is formulated as state space system. The method uses GPS and RSSI data to identify the short term and long term behavior on of the received signal power. The system's design matrix includes the ray tracing models (canyon and non-canyon) needed to estimate the PLE. Based on this the distance to each RSSI measurement source is estimated and consequently its respective position. Once the GPS-Assisted PLE model is derived at any time a user without GPS (for instance, equipped with a WiFi-only device) is capable of estimating her/his position.
A case study was implemented employing an 802.11 based network and data from a consumer-grade GPS receiver. The results were encouraging. The
Although there are different works in the literature review that combine GPS and RSSI, none of them explicitly produce a PLE model. However, there are related works with real implementations which obtain a higher accuracy but they require additional GPS hardware or manual deployments in predefined grids.
Future work includes additional case studies for protocols such as 802.15.4 and 802.15.1. Also, since least squares are the basis of the proposed methodology this can be extended to other applications such as blind node tracking based on Kalman Filters.