
Abstract
A new wireless sensing network paradigm is presented for face recognition applications. In addition to the flexibility the face recognition system gains by integrating into a wireless sensor network, we take it further by introducing mobility into the network to improve the sensing coverage area and cost efficiency. To implement these goals, a multilayered network structure and Gauss-Markov mobility model are proposed. Furthermore, analysis of the sensing coverage area is given. Besides, some of the potential application scenarios based on the proposed paradigm are also presented. According to the simulation, the whole system achieves high recognition rate and energy efficiency compared to stationary network.
1. Introduction
As one of the most important biometric techniques, face recognition (FR) has advantages of being natural and passive over other biometric techniques requiring cooperative subjects, such as fingerprint recognition and iris recognition [1]. A normal framework of FR system is shown in Figure 1, including procedures of enrollment and identification. It has been widely used in access control, identification systems, and surveillance [2].

Framework of FR system.
Nevertheless, in traditional FR systems, the biometric information is stored remotely in a central database, and the identification device communicates with the database based on traditional wired network [3]. In recent years, some researchers add a wireless dimension to FR systems by combining it with wireless sensor networks (WSNs) [4], which is another hot research topic. For example, Zaeri et al. propose to apply face recognition for wireless surveillance systems [5]. Kim et al. implement a wireless face recognition system based on ZigBee protocol and principle components analysis (PCA) method with low energy consumption [6]. Chang and Aghajan focus on recovering face orientation for more robust face recognition in wireless image sensor networks [7]. Muraleedharan et al. propose to use a specific evolutionary algorithm to optimize routing in distributed time varying network for face recognition [8]. In this work, we take it further by introducing mobility in WSNs for face recognition. To this end, a multilayered structure and Gauss-Markov based mobility model for wireless sensor network are provided. To our best knowledge, it is the first research work proposing an integrated framework of employing face recognition in mobile WSNs (MWSNs). The main contributions of this paper are summarized as follows.
We propose a novel prototype of FR system in the environment of mobile WSNs. The FR system gains flexibility and cost efficiency while being integrated into a wireless work. Meanwhile, the face recognition technique enhances the functionality and security of the wireless network.
According to the functionality of different components in the network, a multilayered network architecture is built, which introduces a Gauss-Markov mobility model into each level to increase the covering area.
Last but not least, several potential applications based on the paradigm in this work are presented.
The remainder of this work is organized as follows. In Section 2, background on mobile wireless sensor networks and face recognition is summarized. The structure of proposed face recognition paradigm and the mobility model applied in the sensor network are presented in Section 3. Potential applications based on the mechanism in this work are also investigated in this section. Empirical results and simulation analysis are given in Section 4, and the paper is concluded finally in Section 5.
2. Background
2.1. Mobile Wireless Sensor Networks
Due to recent technological advancement in low power wireless communications and low cost multifunctional sensors, a lot of research efforts have been put in the field of wireless sensor network (WSN), in which a large number of sensor nodes collaborate by means of wireless transmissions for remote monitoring, tracking, and so on [9]. As illustrated in Figure 2(a), a wireless sensor network is usually composed of densely deployed sensor nodes that have been spatially scattered inside the sensing filed. These self-organized sensor nodes will collect the information in interest and deliver it back to the sink node for further transmission via power efficient multihop routing protocols. In traditional static WSNs, the topologies are generally assumed to be invariant, which will subsequently lead to two principal problems: firstly, the network connectivity and coverage may not be guaranteed, in case of sensor failure or malfunctioning (e.g., due to obstacles or energy depletion), which will cause a disconnection between nodes. Secondly, the nearer a sensor node lies relative to the sink node, the faster it will deplete its energy. In fact, the nonuniformity of energy consumption among the sensor nodes will significantly reduce the lifetime of the whole network [10]. To address these problems (connectivity and lifetime), similar to the research trends in mobile ad hoc networks (MANETs) [11] and delay tolerant networks (DTNs) [12], mobile elements (MEs) have also been introduced to WSNs, forming mobile wireless sensor networks (MWSNs) [13]. MEs play the role of either sinks or sensor nodes in the network, as shown in Figure 2(b).

Topology of (a) WSN and (b) mobile WSN.
Due to the fact that MEs can cope with isolated regions, a sparse WSN architecture becomes a feasible option. Besides, by using mobile elements, the battery lifetime of individual sensors can be increased by shifting the energy consumption burden for communication to MEs. Furthermore, reliability can also be achieved owing to the single-hop transmission between MEs and sensors. Finally, in contrast to conventional static WSNs, targets that might never have been detected in a static WSN can now be detected by MEs due to sensors’ (or sink's) mobility [10]. Based on these significant advantages, this work concentrates on integrating the application of face recognition into MWSNs.
2.2. Face Recognition
Automatic recognition of faces is considered as one of the fundamental problems in computer vision and pattern analysis, and many scientists from different areas have proposed many approaches to address it [2], including knowledge-based methods which encode facial features according to rules applied based on the typical face [14]; template matching methods which match images to those from a category of stored facial images or features [15]; appearance-based methods which develop models for comparison based on training images [16]; and invariant models which use algorithms to discover facial features even though the view and pose of the subjects and/or lighting conditions change [17]. Among these methods, one of appearance-based methods termed as eigenfaces [16], which is based on PCA, has been applied most extensively. This approach transforms the holistic face image into a small set of eigen vectors, which are the principle components of the initial training set of face images. Recognition is performed by projecting a new probe face image into the subspace spanned by the eigen vectors and then classifying the face by comparing its positions in face space with known individuals in the face database. PCA as well as other variant methods based on it has yielded promising results on frontal face recognition. Hence, in this work, PCA is applied for the task of face recognition.
3. Paradigm of Face Recognition in MWSNs
In this section, we present the architecture and design of the MWSNs. We firstly give an overview of the network organization at three levels and then describe the mobility model applied in this paradigm. Furthermore, the analysis of coverage is presented. Lastly, we explore the possible applications based on the paradigm.
3.1. Overview
Mobility might be involved at the different network components, as shown in the architecture illustrated in Figure 3.

Proposed multilayered structure of face recognition network.
Depending on the rules that MEs are playing in the network, the structure of the mobile network is divided into three layers.
Sensor level nodes at this level are the sources of information. Such nodes perform sensing as their main responsibility. For the task of face recognition, sensor nodes with cameras are devoted to capturing face images. They may also forward or relay the probe face images in this network, depending on the adopted communication paradigm. The mobile nodes at this level are mainly used to address the problem of sensing coverage. These mobile sensor nodes change their location to better characterize the sensing area or to forward data from the source nodes to the sink. In this case, the primary concern is avoiding coverage holes—areas where the sparse distribution of nodes is not dense enough to properly characterize a phenomenon or detect a probe face.
Sink level nodes at this level are the destinations of information. They collect face images sensed by sensor nodes either directly (i.e., by visiting sensors and collecting data from each of them) or indirectly (i.e., through intermediate nodes). They can either autonomously process collected facial image data for their own purposes through related image processing algorithms or make them available to remote users by using a long range wireless Internet connection. As a consequence of introducing mobility to this level, the WSN topology can actively change in order to improve both communication reliability and energy efficiency.
Task level nodes at this level implement the related algorithms for the task of recognition or identification. To implement this, adequate resources of computing, storage, and power should be assigned to the task nodes. For example, the related nodes need to store the eigenvectors of gallery images in the face database. In addition, they are also responsible for measuring the similarity between probe and galley images in the projected eigenspaces. With mobility, the recognition procedure can be implemented with high efficiency.
3.2. Mobility Model in MWSNs
3.2.1. Initial Configuration
In this work, we consider a network consisting of a great number of sensors placed in a vast two-dimensional geographical sensing field R. For the initial configuration, the locations of these sensors are uniformly and independently distributed at random locations in the region. According to our assumption, the sensor locations can be modeled by a stationary two-dimensional Poisson point process. Denote the density of the underlying Poisson point process by λ. The total number of sensors in the region R is

In a stationary sensor network, sensors do not move after being deployed and network coverage remains the same as that of the initial configuration. While for a mobile sensor network, depending on the application scenario, sensors can choose from a wide variety of mobility strategies, from passive movement to highly coordinated and complicated motion [18], for example, random walk mobility model [19] based on random directions and speeds, boundless simulation area mobility model [20] that converts a 2D rectangular simulation area into a torus-shaped simulation area, Gauss-Markov mobility model that uses one tuning parameter to vary degree of randomness in the mobility pattern [21]. In this work, the Gauss-Markov Model is used to simulate the nodes’ motion in the network. We assume sensors move independently of each other and with coordination among them. To characterize the movement model of a sensor, the speed S and direction θ are utilized. For every constant time period, a node calculates the speed and direction of movement based on the speed and direction during the previous time period, along with a certain degree of randomness incorporated in the calculation. The node is assumed to move with the calculated speed and in the calculated direction during the time period. Details of the mobility model will be described in the next section.
3.2.2. Mobility Model
The Gauss-Markov mobility model has been used for the simulation of an ad hoc network protocol [21]. In this section, we shall describe how the model is implemented in mobile WSNs.
Firstly, each ME in the network is assigned an initial speed and direction. At fixed intervals of time, n, movement occurs by updating the speed and direction of each mobile node. Specifically, the value of speed and direction at the nth instance is calculated based upon the value of speed and direction at the

where
where
3.3. Sensing Coverage Area Analysis
In this section, we study and compare the area coverage of both stationary and mobile sensor networks for face recognition.
(1 ) Stationary Network. We assume that each sensor node in the network can cover a panoramic view of 360 degrees and a disk with radius r. Consider that

where
According to Tonelli's theorem [22], we have
Consider an arbitrary point η in region R and denote the number of sensors which cover the point as N. Point η is covered by sensors located within distance r. It follows immediately from the Poisson point process assumption that N has a Poisson distribution with parameters

Note that the above derivation is independent of R. The area coverage can thus be obtained as follows:

This formula characterizes the dependence of area coverage on the network properties, that is, the density of the nodes and the coverage area for each node in the sensing field.
In a stationary sensor network, a location always remains either covered or not. The area coverage does not change over time.
(2 ) Mobile Network. Given the initial node placement and the random mobility model, at any time instant t, the locations of the sensors still form a two-dimensional Poisson point process of the same density. Therefore, the fraction of the area covered at time t remains the same as in the initial configuration,
During time interval

where
As pointed out in [23], area coverage depends on the distribution of the random shapes only through its expected area. Therefore, we have

While an uncovered location will be covered when a sensor moves within distance r of the location, a covered location becomes uncovered as sensors covering it move away. As a result, a location is only covered part of the time. More specifically, a location alternates between being covered and not being covered, which can be modeled as an alternating renewal process. We use the fraction of time when a location is covered to measure this effect. The fraction of time that a location is covered equals the probability that it is covered at any given time instant,
At any specific time instant, the fraction of the area being covered in a mobile sensor network model described above is the same as in a stationary sensor network. This is because at any time instant, the positions of the sensor are still described by a Poisson Boolean model with the same parameters as in the initial configuration. Unlike in a stationary sensor network, areas initially not covered can now be covered as sensors move around in a mobile sensor network. Consequently, facial targets in the initially uncovered areas can be detected by the moving sensors. According to (10), the more sensors exist, the more expected coverage area will be achieved, which is the same as stationary network. Furthermore, the fraction of the area that has ever been covered increases as time goes by, and the growth rate depends on the movement speed of sensors involved. The faster the sensors move, the more quickly the area is covered. Therefore, sensor mobility can be exploited to compensate for the lack of sensors to improve the area coverage over an interval of time.
3.4. Potential Applications
In this section, we have listed possible application scenarios for face recognition in MWSNs, with the goals of achieving social interaction, remote surveillance, and security.
3.4.1. Mobile Network Establishment
In this scenario, we consider using mobile smart phones as the mobile elements in the network. All the current smart phones have camera sensors for shooting face images and can be connected to a specific network through cellular network or other protocols such as Bluetooth or ZigBee. Using such mobile devices as sensors has a significant advantage over unattended wireless sensor networks in deploying the sensing hardware and providing it with network. Secondly, mobile phones can provide coverage where static sensors are hard to deploy and maintain. Thirdly, each mobile device is associated with a human user, whose assistance can sometimes be used to enhance application functionality. For instance, a human user may help by pointing the camera appropriately at the target face to be sensed.
In one embodiment, in connection with making comparisons of a captured image with those cataloged in a database, the portable devices used to capture the images may page or multicast signals to other devices within range, sending a query requesting confirmation of the identification. In connection with an affirmative response, further identifying information may be exchanged allowing further messaging such as SMS messages, video or email messaging, and other wireless communication among devices. Based on this identification, one or more mobile networks may be established or extended.
3.4.2. Social Interaction
One other possible scenario of face recognition in WMSNs is that of social interaction. There is a rapid increase in number of mobile subscribers all over the world. With the efficient identification scheme, mobile phones can act as sinks to have a “social interaction” among peers who share the common interest. By entering into a “session” with existing sensors or WSN in a particular area through mobile face recognition, the mobile phone user can get the necessary information on his mobile phone, like the location of his friends/relatives, the time table/schedule of the events taking place, environmental conditions, and so forth. With the help of little initial information about the user, it is also possible to enter into any area, shop around, and buy digital tickets, all with electronic billing.
3.4.3. Remote Wireless Surveillance
In this scenario, our goal is to enhance the utility of the existing surveillance system. In case of monitoring geographically inaccessible or dangerous areas, mobile robots equipped with camera sensors can be deployed for effective coverage. Moreover, if the target to be detected by the sensor network is of time-critical nature, the coverage of the network should be sufficiently high to be able to respond to the detected event in a timely manner, such as monitoring in battle filed or liveliness rescue in case of an earthquake, where the emergency personnel work against the clock.
4. Simulation
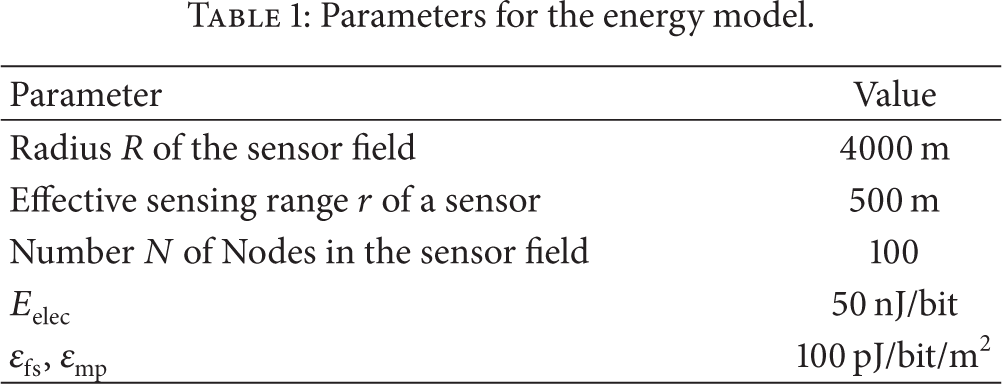
In this section, performance comparison of stationary and mobile network in terms of target recognition rate and energy efficiency is provided via Monte Carlo simulations, where each simulation setting is computed over 500 different runs. It is assumed that the range of the mobile nodes, r, is 500 m. The simulation area is circle-shaped with a radius of 4000 m. Initially, mobile nodes are randomly distributed according to the Poisson point process described above in the simulation area. The speed of the mobile nodes is assumed to be 5 m/s. The mobility tuning parameter α in Gauss-Markov is set as 0.5. For the validation of recognition, 200 subjects in FERET dataset [24] are selected. For each subject, one frontal image with regular expression is chosen as the gallery image and one image with alternative expression as the probe image.
4.1. Recognition Rate
In this work, we investigate the recognition of target with a linear motion model. We assume that the target starts its motion from a randomly selected point in one boundary of the simulation area and moves toward a randomly selected point in the opposite boundary following a line. This scenario could be considered an example of border monitoring, where the target tries to cross the border without being detected.
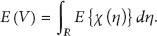
Figure 4 shows the recognition performance of the mobile and stationary WSNs versus number of nodes. It is obvious that the mobility in the network highly improves the detection rate for recognition, which is mainly due to the increase of the coverage area. Furthermore, it can be concluded that the recognition rate has a positive correlation with the number of sensors in the network. To take it further, the impact of motion speed on the recognition rate is examined by modifying the parameter S, as illustrated in Figure 5 (the number of sensor nodes is 50). According to (10), as the motion speed of components grows, the coverage area in the network over an interval increases, thus leading to a higher recognition rate.

The comparison of recognition rate for stationary and mobile WSNs.
The impact of nodes’ motion speed on recognition rate.
4.2. Energy Efficiency
To further analyze the energy efficiency, we use the following energy model [25]. To transmit an k-bit data to a distance d, the radio expends energy:

The first item denotes the energy consumption of radio dissipation, while the second denotes the energy consumption for amplifying radio. Depending on the distance between the transmitter and receiver, both the free space

In this work, the related parameters are listed in Table 1.
Parameters for the energy model.
The comparison of the energy consumption between stationary and mobile network is shown in Figure 6. By introducing mobility into the network components, high energy efficiency can be achieved, and the network lifetime will be prolonged. The reason to explain this is that the related network components, including senor nodes, sink nodes and task nodes, move within the simulated field; energy consumption does not concentrate on several nodes, which means that the distribution of energy consumption is fair over the whole network.

Comparison of the energy consumption between stationary and mobile networks.
5. Conclusion
In this paper, we have presented a multilayer architecture for the mobile wireless sensor network as a key element of face recognition paradigm. Firstly, the overview of the network's structure is given. Then, the detailed mobility model is presented in this paper, followed by a theoretical analysis of impact of mobility on the sensing coverage area compared to stationary networks. We have further discussed some of the future potential application scenarios for this face recognition paradigm in the environment of mobile WSNs. According to the simulation validation, by introducing the Gauss-Markov mobility model to different levels in the network, the coverage area and energy efficiency can be improved at the same time.
Footnotes
Acknowledgments
The research is supported by the National Natural Science Foundation of China (Grants nos. 61170065, 61171053, 61003039, 61003236, 61103195, and 61203217), the Natural Science Foundation of Jiangsu Province (Grants nos. BK2011755, BK2012436, and BK20130882), Scientific & Technological Support Project of Jiangsu Province (BE2011844 and BE2011189), Peak of Six Major Talent in Jiangsu Province (Grant no. 2010DZXX026), Project sponsored by Jiangsu provincial research scheme of natural science for higher education institutions (Grant no. 12KJB520009), Science & Technology Innovation Fund for higher education institutions of Jiangsu Province (Grant no. CXZZ11_0405), and Students’ Innovative Training Program of Nanjing University of Posts and Telecommunications (SZDG2013042).