
Abstract
The optimal distributed tracking control algorithms over nonlinear cooperative wireless sensor networks (WSNs) are presented in this paper. In order to solve transfer delay and packet loss problem, the architecture of wireless active sensor (WAS) is employed, where a state estimator is embedded, which can provide the needed state information. Furthermore, the optimal distributed tracking control algorithm is proposed. By solving the matrix equations and the adjoint difference equations, the optimal control law can be obtained easily, in which an increment integral regulator is designed to implement tracking target without steady-state error and a nonlinearity compensation term is designed to compensate for the effect produced by system nonlinearity. Moreover, the observer-based dynamical algorithm is given considering the physically unrealizable disturbance states and the unavailable sensor states. Finally, computer simulations are carried out with application to two nonlinear pendulums, which prove that the algorithm is effective and easy to implement, and the system achieves the desired performance based on tradeoff between tracking error and control energy consumption.
1. Introduction
Target tracking has valuable application in scenarios of military, industry, architecture, natural resources detection, search and rescue operation, civil surveillance system, mobile robot, autonomous underwater vehicle, unmanned aerial vehicle, and so forth. For instance, during ocean resource exploration, towed vehicle is required to track the given route in order to load the detection device getting underwater data [1]; the hydrofoil craft tracks the predesigned route to implement the marine task [2]; in space, attitude tracking control for airplane or spacecraft has always been a significant research [3]; the studies of mobile robot on trajectory tracking [4], tour tracking [5], and formation control [6] have sprung up worldwide. With the increasing development of science technology, the requirement for tracking stability, accuracy, real-time quality, and so forth, becomes higher and higher. And thus, WSNs grow to be adopted widely in tracking tasks due to their convenience, flexibility, mobility, and low cost, which play an irreplaceable role in practical engineering by now.
However, some limitations of WSNs, such as noise, interference, limited bandwidth and power, and time-varying gain, bring the factors of uncertainty, nonlinearity, time-delay, or limited energy to WSN-based control systems. Thereby, it is still an emerging and challengeable research to study tracking control problems on WSNs. Currently, there are some results reported on this field. As for the analysis for system characteristics, [7] showed that the tradeoff between data rate, time-delay, and packet loss will greatly affect the performance of distributed wireless networked system; [8] developed the result in [7] for a control system where data exchange between sensor-controller and controller-actuator are all completed over WSNs; [9] analyzed the input-output stability of nonlinear control system on wireless network with disturbance; [10] presented a testbed for ambient intelligence under the constraints of low power, limited spectrum and resources; [11] discussed the effect on an ambient intelligent system by network-induced delay, random uncertainty, and limited packet information and gave three compensation strategies. On the other hand, as for the tracking control issues in WSNs environment, [12] designed the fuzzy observer-based tracking control for time-delay nonlinear distributed parameter system; [13] proposed variable structure control for consensus tracking problem of autonomous vehicle formation; [14] gave an intelligent Fuzzy control for real-time tracking; [15] used range and range-rate measurement for multitarget tracking relating with the uncollected information; in [16], an adaptive predictive control reduced the energy consumption and enhanced tracking accuracy for wireless network system; [17] built a multimodality framework and gave n-step predictive tracking algorithm to conserve the energy consumption. Seeing that, previous works on tracking control problems have given some algorithms or solutions to solve the relevant issues. However, during these reports, some concerned the models with simple representations but not from a large-scale system viewpoint; others tended to ignore the specifics in such WSNs environment, for example, nonlinearity, uncertainty, time-delay, limited power, or steady-state error of tracking.
Alternatively, this paper explores to design an optimal tracking control without steady-state errors with distributed systems in a large-scale system viewpoint, taking into account the disturbance, nonlinearity, and time-delay faced by the system. The key contributions of this paper are twofold: first, to model an appropriate system, an interconnected large-scale system combined by N subsystems is built, in which the interconnected terms represent cooperative communications between the sensors; then, to design the zero steady-state error controller, the relevant optimal tracking control algorithm is presented, which is derived from the matrix equations and adjoint difference equations, in which an increment integral regulator is designed to eliminate the steady-state error. On the basis of the control performance, the tracking error and control energy are designed in the performance index prior so that the goal of the wireless networked control system is ensured to be achieved.
The paper incorporates three novel features: (1) it gives a distributed architecture. The traditional centralized architecture (Figure 1) is practically proved unsuitable to a large-scale environment for its limited communication bandwidth and power supplies [18–21]. Instead of it, we focus on the distributed architecture, for example, Figure 2, where each sensor can be viewed as an intelligent agent with some degree of autonomy in decision-making, and information is exchanged between nodes to compute an almost optimal sensor-target assignment, which makes it more robust and efficient than the centralized one. (2) It presents a cooperative algorithm for the WSNs-based control design. In the cooperative distributed approach, the sensors are rational; that is, each sensor will not only consider its own benefit over a permissible action space, but also the other sensors' behavior [21, 22]. According to the presented cooperative algorithm, the sensors can know the others' states from the wireless network and consider the tradeoff between tracking performance and the expense of it. (3) It proposes an optimal algorithm for tracking control. As it is known, limited power supply is a challenge which is inherent from the nature of sensors. Although some methods were introduced to deal with this problem, for example, [23, 24], fundamentally, the tracking algorithm should be improved to adapt to this reality. The proposed optimal tracking control design is capable of minimizing the control energy of each sensor.

Two centralized control systems supported by WSNs.
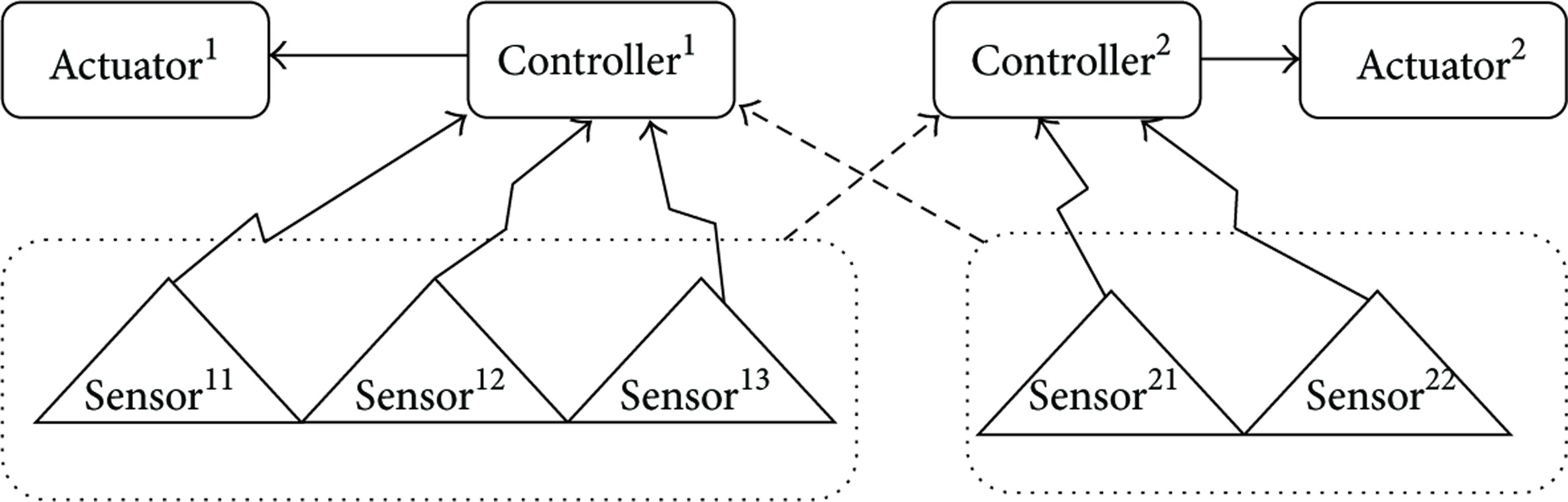
Two distributed cooperative control systems supported by WSNs.
The organization of this paper is as follows. After this introduction, in Section 2, systems description and problem formulation have been done. Section 3 proposes the design procedure of optimal distributed tracking algorithms. Computer simulations are demonstrated in Section 4. Concluding remarks are given in Section 5.
Notation.
Throughout this paper the following notations are used. N denotes the set of integers and
2. Problem Statement
A cooperative distributed control system over WSNs is illustrated in Figure 2, which consists of two subsystems. As it is shown, the 1st subsystem is combined by three sensors and the 2nd subsystem by two sensors, which are communicated with each other to exchange data by WSNs. In each of these subsystems, a base station acts as the controller which transfers the command signal to the actuator ensuring it be executed by the plant.
2.1. Distributed WSNs Model
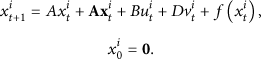
In the first place, the distributed control system is modeled and the problem is formulated. The distributed WSNs system is modeled by a discrete-time interconnected large-scale system consisting of N subsystems, which is described by


For the
Assumption 1.
The pair
Assumption 2.
The pair
For physical implement, Assumptions 1 and 2 guarantee the communicability and connectivity of information over a network. Under these conditions, the data can flow and be observed over network among controllers, actuators, and sensors, which enable information from sensors to reflect the information of system states completely. On the other hand, for mathematical derivation, the two assumptions guarantee the stabilizability and observability of the
Since every subsystem is described by system (1), in what follows, the superscript
Supposing that the dynamical characteristic of disturbance is unknown, thus it can be described in the form of an exosystem:

Furthermore, the tracked target can be denoted by a reference vector
2.2. Problem Formulation
In order to design a control law to track the target without steady-state error, an integrator is to be designed. Therefore, the control increment


Consequently, denoting the augmented state vector




3. Optimal Distributed Tracking Control Design
3.1. Design of Estimators at Sensors
In WSNs, information collected from sensors is always not complete, which is attributable to transfer delays and packet losses. A kind of wireless estimation sensor is introduced to avoid challenges associated with transfer delays and packet losses [27–29]. As shown in Figure 3, a WAS consists of four functional components: sensing interface, computational core, wireless communication channel, and actuation interface. The sensing interface connects the perfectly estimated analog signals, converts them to digital ones, and then transfers them to computational core ready to process. The designed algorithm is embedded in computational core which outputs control command signals to actuation interface. In actuation interface, the control signals are converted into analog ones while driving actuators or active sensors to execute control forces. Wireless communication unit allows the connectivity among this and other sensors and remote data servers within WSNs. Through a series of laboratory tests, such a kind of wireless active sensor is attested that not only its architecture is simple and easy to design but also it enhances the communication performance for its direct connection within sensor-controller-actuator. In this study, this kind of useful WAS architecture will be employed in distributed WSNs modeling. In addition to these reports, we will provide an estimator design method and the corresponding algorithm for the wireless estimator, which can be embedded in the WAS. Consequentially, the unavailable states will be entirely estimated and the transfer delays and packet losses can be effectively avoided as well. After this procedure, the perfect state information can be collected by the active sensors over the WSNs and all information is ready in the sensing interfaces for controller computations.

Architecture of WAS.
Consider that the

3.2. Optimal Tracking and Disturbance Rejection Control (OTDC) Design
3.2.1. Global Optimal Control of Nonlinear System
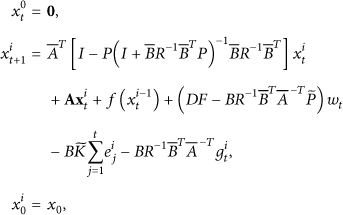
This section is devoted to outlining the sufficient and necessary condition for the optimality of a tracking and disturbance rejection control of the quadratic optimization problem (4) or (5) subject to the nonlinear dynamical constraint (1). As above mentioned, in order to simplify the derivation, one might consider the equivalent optimal regulation problem (9) or (10) subject to (7). Then Theorem 3 can be gotten.
Theorem 3.
Given the nonlinear large-scale system (1) and the cost functional (4) or (5), where the distributed control





Proof.
In analogy to classical linear quadratic regulator (LQR) optimal control theory from minimum principle, the Hamiltonian for the linear quadratic regulation problem (7) with respect to (9) or (10) becomes










Furthermore, substituting the costate vector (25) into the costate equation (20) yields




3.2.2. Approximations of Sequences of Adjoint and State Equations
However, noting that the adjoint equation (16) and the optimal state equation (17) are coupled nonlinear difference equations, they are complex and seldom have analysis solutions. So, in this paper, the sequence approximation method in continuous-time domain [30] is developed into discrete-time domain to solve the coupled nonlinear equations (16) and (17).
Firstly, replace the difference equations (16) and (17) by the following sequences of linear time-invariant (LTIV) approximations:





Lemma 4.
Let
Proof.
Denote








From Lemma 4, Lemma 5 is directly produced.
Lemma 5.
Let
Hence, the implication of the sufficient and necessary condition for a global distributed optimal solution of the nonlinear quadratic tracking and disturbance rejection control problem (1) with respect to (4) or (5) is given by the following theorem.
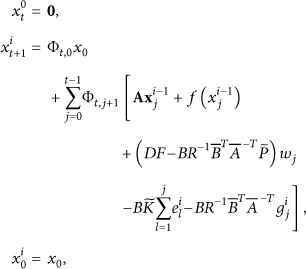
Theorem 6.
Given the nonlinear system (1) and the cost functional (4) or (5), where

It is obvious that (33) and (34) (or (35) and (36)) are the TPBV problem of the LQR TPBV problem of the sequence (49) or (50) subject to the constraint (51). Following from Theorem 6, an alternative equivalent nonlinear OTDC problem of (1) is summarized as the following corollary.
Corollary 7.
The nonlinear quadratic optimization problem to find


Remark 8.
The optimal control
To prove the uniqueness of optimal control
Lemma 9 (see [31]).
Assume that


Then, we will use Lemma 9 to prove the uniqueness of
Proof.
Since the triple



Additionally,
Remark 10.
It should be noted that, in practice, the exact adjoint vector


Hence, the synthesis algorithm of SOTDC for systems (1) is schemed out as follows.
Algorithm 1.
SOTDC of system (1).
Step 1. Regulate
Step 2. Judge the controllability-observability of
Step 3. Determine matrices in (8).
Step 4. Get the augmented system (7).
Step 5. Solve P and
Step 6. Obtain the
Step 7. Letting
Step 8. Determine
Step 9. When
Step 10. Calculate
Step 11. Letting
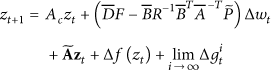
3.2.3. Closed-Loop Stability Analysis
Taking







3.2.4. Physical Realization of SOTDC
Notice that SOTDC (57) includes the disturbance state w which is physically unrealizable. Moreover, in WSNs, states of x might not reach the controller completely. Therefore, we can reconstruct these states through a reduced-order observer by using the output vectors v and y. Defining
where

Algorithm 2.
DSOTDC for system (1).
Step 1. Regulate
Step 2. Determine the matrices in observer (67).
Step 3. Judge the controllability-observability of
Step 4. Determine matrices (8).
Step 5. Get augmented system (7).
Step 6. Solve P and
Step 7. Obtain the
Step 8. Letting
Step 9. Determine
Step 10. When
Step 11. Calculate
Step 12. Letting
3.3. OTC Design
In some cases, regarding a tracking problem, disturbance effect is minor and the key of analysis and synthesis is speediness and accuracy of tracking. Consequentially, ignoring disturbance effect on a system, the following distributed optimal tracking control (OTC) is presented. In the same way, using the maximum principle and letting
Theorem 11.
Given the nonlinear large-scale system (70)


For briefness, the distributed suboptimal tracking control and the observer-based dynamical suboptimal tracking control are omitted.
4. Simulation Examples
Consider two identical pendulums, which are controlled by the forces




One wireless sensor is installed upon each of the pendulums; in total, two wireless sensors are installed. The role of the wireless sensor is to measure the angle velocity of the pendulum, calculate an OTDC force, apply a command signal to actuator, and wirelessly exchange data with other wireless sensors sharing a wireless network. To determine the angle velocity, each wireless sensor measures the absolute velocity from a velocity meter equipped with the pendulum, see Figure 4.

Pendulums equipped with velocity meters and wireless active sensors.
Then, in the first place, we will validate the effectiveness of the designed OTDC. Command no. 1 pendulum to keep its angle θ tracking a step signal target as

The closed-loop structural diagram of controlled pendulum system on WSNs.
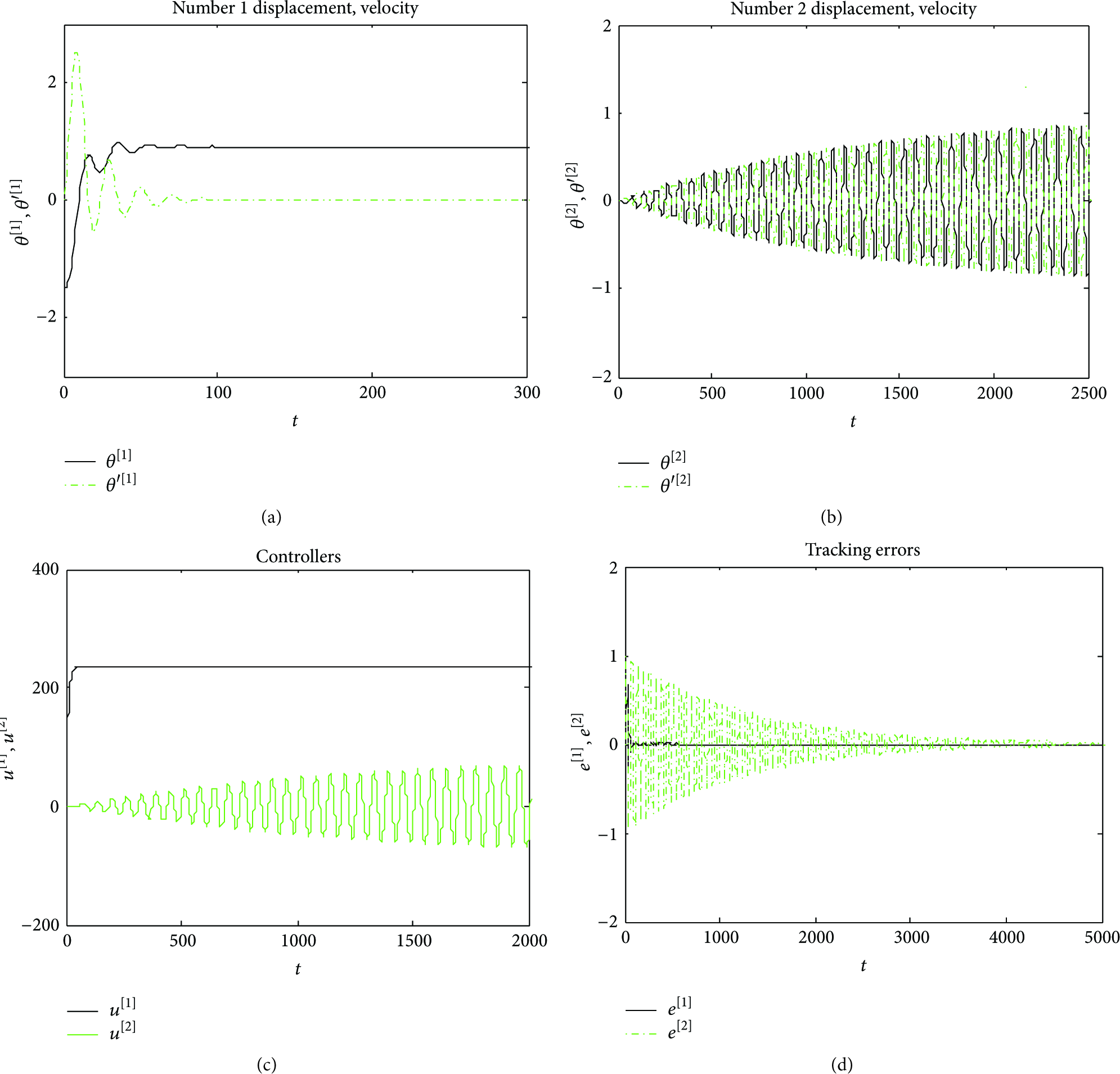
Pendulums' responses tracking step and sinusoidal signals.
They receive the information of themselves and that of others, respectively, by communicating over the WSNs and obtain it through the matrices
Consequently, in order to demonstrate the effect of zero steady-state error with OTDC approach, we compare with a feedforward and feedback optimal control (FFOC). The relevant tracking errors are exhibited in Figure 7.

No. 2 pendulum’ responses tracking sinusoidal signals by OTDC and FFOC.
Figure 7 reveals that the tracking error approaches zero by employing OTDC. However, the one through FFOC approximates some stable sinusoidal signal but not zero, since the increment integral regulator enables eliminating the steady-state error especially for high-order signals. Contrarily, the feedforward compensator can only stabilize system states while tracking the target; in most cases, it does not possess the property to eliminate steady-state errors.
5. Conclusions
In this paper, we have presented the optimal tracking control algorithms for distributed nonlinear systems on WSNs. The optimization algorithm has been derived from increment equations and obtained by solving discrete-time matrix equations and difference equation sequences. Illustrated by the numerical simulations, it has shown that the targets can be tracked without steady-state errors and the design goal of balancing the tradeoff between track error and energy consumption can be archived over WSNs.
Footnotes
Acknowledgments
This work was supported by the China Scholarship Council Foundation (201208535084), the Natural Science Foundation of Yunnan Province (2011FZ169), and the Open Fund of Key Laboratory in Software Engineering of Yunnan Province (2011SE15).