
Abstract
Providing diverse quality-of-service (QoS) with ultra-low power consumption and mobility support is the most important and challenging issue in machine-to-machine (M2M) networks. In a typical beacon-enabled network, nodes need to wake up for receiving periodic beacon in order to maintain synchronization. Here, we present a new MAC protocol called passive-synchronization-based energy-efficient MAC (PSMAC) that synchronizes nodes in their sleep state by using interrupt generated from the proposed radio-triggered hardware. In order to activate the radio-triggered hardware, the synchronization frame is broadcast, but in a separate channel called synchronization channel, so that interrupts are not generated during data transmission. This synchronization frame is also used for providing the fast and energy-efficient association. Network information is embedded into the synchronization frame so that mobile nodes can learn about their neighbors just by scanning the synchronization channel. Furthermore, by positioning the beacon period after the contention access period, PSMAC provides fast and preemptive slot allocation that can handle diverse QoS requirements. We compare PSMAC with IEEE 802.15.4 and show that PSMAC has much better performance in node association time, energy efficiency, and faster data delivery at the cost of additional radio-triggered hardware and a dedicated channel.
1. Introduction
Machine-to-machine (M2M) communications are the information exchanges among machines without any human interaction. The possibility to establish networks of automated devices without human intervention facilitates the creation of new applications that can make the world smarter and more efficient, for example, smart buildings, smart cities, smart grids, e-health, or automotive applications, among many other examples. M2M communications are characterized by low power, low cost, and low human intervention [1]. A typical M2M network would have large number of nodes; thus, sharing radio resource efficiently while maintaining sufficient quality-of-service (QoS) for reliable communications becomes an essential and challenging requirement [2, 3]. In many M2M applications, saving energy for machines is more important than increasing the throughput because machines usually transmit a small amount of data and are battery powered. One of the critical issues of M2M is how to deal with large number of accesses from large amount of machines while maintaining low power consumption with tolerable latency. Furthermore, some applications such as the automotive applications, robotic networks, and e-health need support for mobility [4]. Hence, the design of a smart and efficient MAC protocol remains a key requirement for successful deployment of any M2M network.
MAC for M2M should support different types of data such as continuous, periodic, burst, and aperiodic along with different levels of QoS [2]. The main schemes of MAC protocols are grouped into either CSMA/CA or TDMA protocols [5]. The CSMA/CA protocols support large number of devices but encounter heavy collisions and extra energy consumption. On the other hand, TDMA protocols provide good solutions to the collision and idle listening problems. However, common TDMAs are required to receive beacons periodically in order to synchronize their clocks. Since the radio on a sensor node is usually the component that uses the most energy, the node should go into sleep state (turn-off transceiver) as long as possible [6]. Another possible alternative to save energy is to use an additional radio-triggered hardware, which can interrupt the sleeping node at the event of interest [7]. Gu and Stankovic proposed radio-triggered wakeups for energy saving [8]. The idea is to use only passive components in order to collect energy from ongoing radio transmissions, as it is done in RFID technology. When the RF signal power induced at the receiving antenna is large enough, a microcontroller in the sensor node is interrupted to wake up its radio component for data communication. Similarly, a wireless identification and sensing platform (WISP) [9] is a commercially available RFID tag, which supports sensing and computing. WISP allows an exciting exploration of a new battery-free form of wireless sensor networking.
In the literature, some MAC schemes have been proposed for M2M to attach end device with the base station (BS), such as the adaptive-traffic-load- (ATL-) slotted MACA in [10], the access class barring in [11], and the frame-based hybrid MAC scheme for M2M networks in [5]. However, these schemes are insufficient. To achieve successful M2M communications, quality-of-service- (QoS-) guaranteed provisioning is the most important requirement. In [12], a QoS-guaranteed M2M massive access management scheme is proposed to reduce energy consumption and end-to-end delay. The IEEE 802.15.4 standard that exhibits a desirable feature for low-power M2M space has been analyzed as a platform for M2M. However, there are several limitations in meeting the requirements of M2M in terms of power consumption, ability to handle mobility, and also flexibility and adaptability [13]. IEEE 802.15.4 lacks support for mobility because it spends a lot of time for association. Also, in IEEE 802.15.4, regardless of presence of data, nodes need to wake up in every beacon period for synchronization draining significant energy. Also, IEEE 802.15.4 allows only up to seven guaranteed time slots (GTSs), which is not enough for M2M applications. The high latency associated with the GTS allocation is also a significant problem. Furthermore, GTS allocation does not consider priorities among different applications. High-priority application can be blocked when all GTSs are already allocated to low-priority applications. In this paper, we propose a hybrid MAC protocol called passive-synchronization-based energy-efficient MAC (PSMAC) for M2M networks, which will combine the benefits of both contention-based and reservation-based protocols. PSMAC supports diverse QoS along with mobility, but with minimal power consumption. To avoid periodic wakeups and decrease the association time, we introduce a new period called synchronization period (SP) in the superframe structure. During SP, coordinators broadcast synchronization frames (SFs) on a separate channel called synchronization channel (SC). SF is used by the unassociated nodes for association and by the already associated nodes for synchronization. SF activates the mounted radio-triggered circuit (triggered only by the SF) interrupting the sleeping node. Thus, a node is synchronized without even turning on the main communication radio saving significant amount of energy. Similarly, nodes can learn about the neighbors by just scanning SC enabling prompt association. Furthermore, by positioning the beacon period after the contention access period, PSMAC provides fast and preemptive slot allocation that can handle diverse QoS requirements. The proposed PSMAC solution attempts to provide mobility, flexibility, scalability, and adaptability, combined with ultra-low power consumption. The PSMAC is sophisticated MAC protocol design that will be beneficial in the next-generation M2M applications.
The rest of this paper is organized as follows. Section 2 presents the brief description on association procedure of beacon-enabled IEEE 802.15.4 followed by network model in Section 3. Sections 4 and 5 show the design and main features of the proposed PSMAC protocol. Section 6 explains QoS features of PSMAC: prompt association, fast and preemptive slot allocation, and prioritized random backoff. Section 7 presents performance evaluation using NS-2. Finally, we conclude the paper in Section 8.
2. Association in Beacon-Enabled IEEE 802.15.4
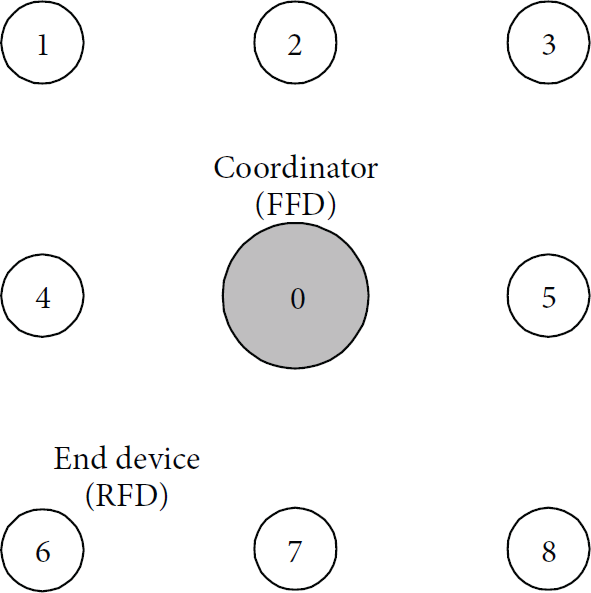
In IEEE 802.15.4, there are mainly two types of devices: full function device (FFD) and reduced function device (RFD). FFD can support all the network functions and can operate as a coordinator or an end device. RFD can only be used as an end device. The IEEE 802.15.4 standard supports three kinds of topologies: star, peer-to-peer, and cluster tree topologies, which can operate on beacon and non-beacon-enabled modes.
In the beacon-enabled mode, communication is synchronized and controlled by a network coordinator, which transmits periodic beacons. The periodic beacons are used to synchronize the attached devices, to identify the personal area network (PAN), and to describe the structure of the superframe. The superframe shown in Figure 1 may consist of active and inactive periods. The active part of the superframe consists of two groups: the contention access period (CAP) and the optional contention free period (CFP). All communications must take place during the active part, and devices can sleep to conserve energy in the inactive part. The structure of superframe is determined by coordinators using two parameters: superframe order (SO) and beacon order (BO). SO is used to determine the duration of superframe, whereas BO defines the beacon interval. Increasing both BO and SO increases transmission latency and decreases system throughput due to intensive channel contention, whereas simultaneously decreasing BO and SO increases energy consumption and reduces available bandwidth [14]. Any FFD could be a PAN coordinator. FFD should perform the energy detection (ED) scan in each channel for the duration of

The superframe structure of IEEE 802.15.4.
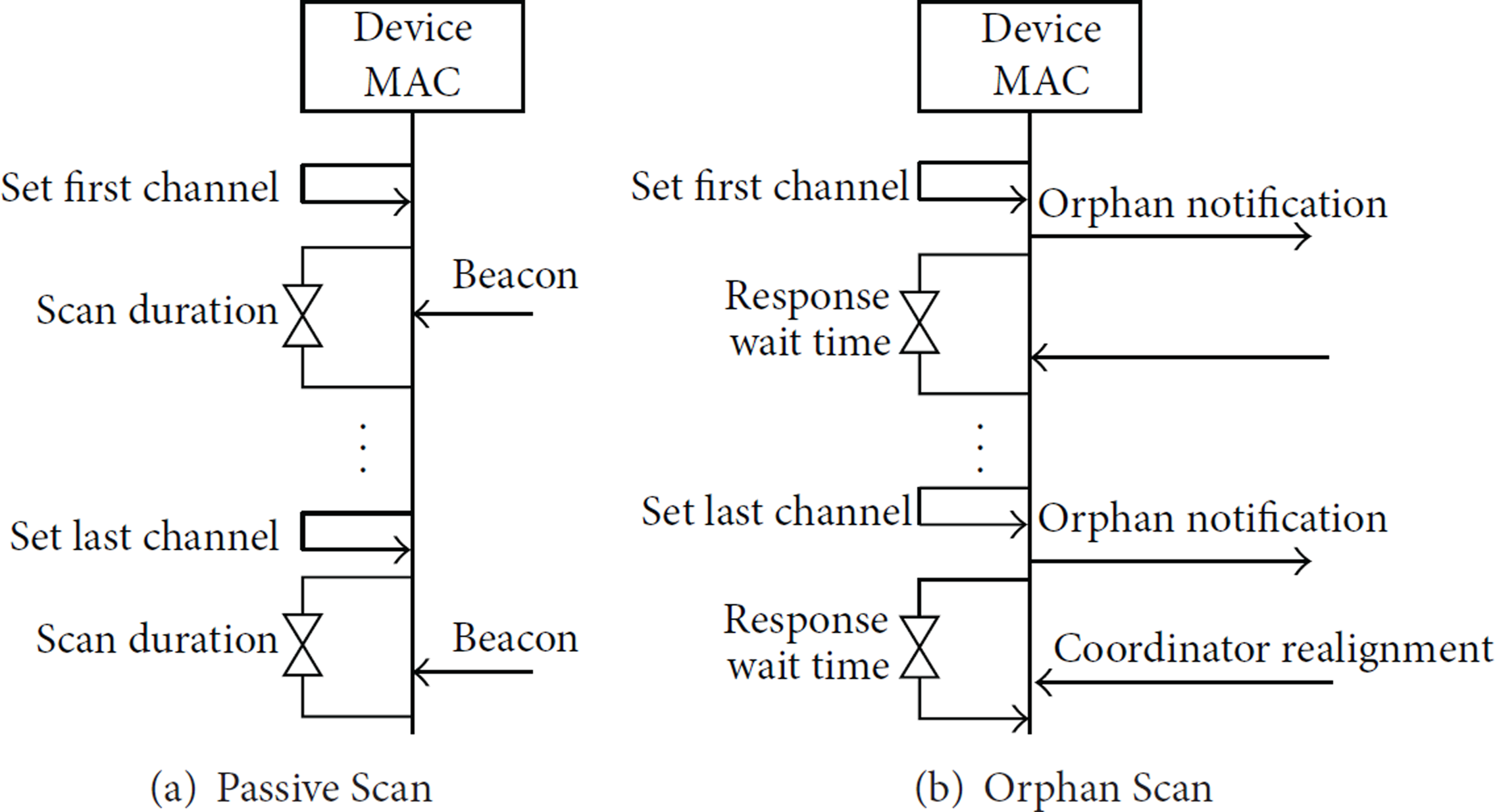
Channel scanning mechanism in beacon-enabled IEEE 802.15.4.
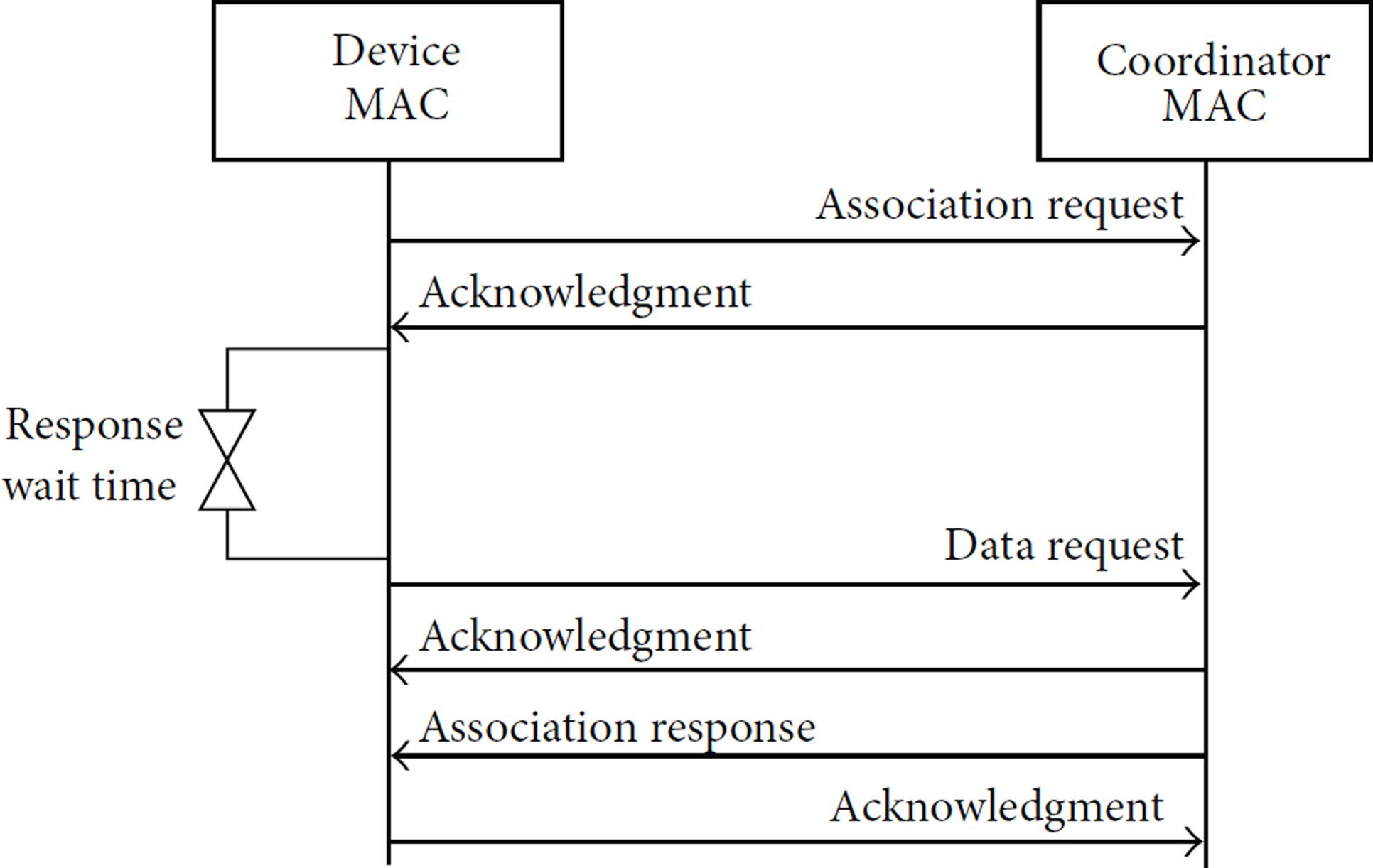
Association message exchange in IEEE 802.15.4.
3. Network Model
We consider M2M network consisting of one base station (BS), k coordinators, and n number of end devices. Moreover, coordinator or FFD is assumed to have fixed static position, while end device or RFD can be mobile. The basic network design is shown in Figure 4, which models a typical home area network (HAN) [2, 3]. All end devices are attached with a coordinator. The coordinator collects data from the surrounding nodes and delivers them to the BS. The BS is the sink node or control center. The distance between a coordinator and an end device is assumed to be of several meters, whereas the distance between a coordinator and the BS can be of several kilometers. In this paper, we only consider the communication between end devices and a coordinator and proposed a MAC protocol for communication between them. Also, the beacon-enabled star topology is considered. However, the communication between the coordinator and the BS is assumed to be done by using some long-distance wireless technology such as 3G connection. The end device can be any machine such as smart meter, smart TV, sensors, and body sensors attached to human body. In our network model, we assume a heterogeneous scenario where all of the devices have a different amount of data with different priorities and QoS requirements.

Network model.
4. System Design
Figure 5 shows the physical architecture of sensor node adapting the proposed PSMAC. As shown in the figure, apart from a normal RF module, a new hardware, that is, a passive radio sensor, is added to the sensor node. Radio sensor is a passive device and does not have decoding capacity [7]. Its sole purpose is to generate interrupt whenever the signal within its operational range is detected. A periodic signal transmitted at the beginning of every superframe activates the radio sensor generating an interrupt. The periodic interrupt synchronizes (keeps track of superframe timing) node in the sleep state. This feature results in continuous operation of sensor node in the sleep mode without losing synchronization and instantly waking-up upon the need for data communication [22].

Sensor node physical architecture.
Unlike the other conventional MACs, which use separate frequency band for the radio sensor [8], PSMAC uses the same frequency band. However, a dedicated channel is assigned for synchronization.
4.1. Motivation behind Radio Sensor
In low-power wireless networks, waking up the receiver in every superframe to listen to a beacon is a significant drain on energy. One solution to avoid node waking in every beacon period is to maintain internal clock and sleep through a number of beacon periods without losing synchronization [13]. However, there are two problems associated with the skipping of beacons. The first problem is the clock drift which may lead to synchronization error if the beacon is skipped for long time. However, this problem can be solved by listening to beacon at certain intervals of superframes. The second but major problem is how to communicate with sleeping nodes. If a coordinator wants to request data from a sleeping node, the only option is to wait until the node wakes up and receives a beacon. These two problems motivated the use of radio sensor. The radio sensor has following two functions.
Synchronization. The radio sensor allows nodes to skip beacon. The SF transmitted by a coordinator in the synchronization channel causes the radio sensor to generate interrupt. The interrupt synchronizes node in the sleep state. Wake-Up Node. When a coordinator wants to communicate with a sleeping node, the SF is broadcasted in the synchronization channel twice. Two consecutive interrupts mean that a node should wake up getting ready for the communication.
In the first sight, it may seem that the radio sensor is extra hardware, which means extra cost. However, the close examination of Figure 6 reveals that the cost of radio sensor is less than few dollars as it is made of few registers and capacitors, a diode, and a transformer. The investment of few dollars has potential to prolong node's life by few years.
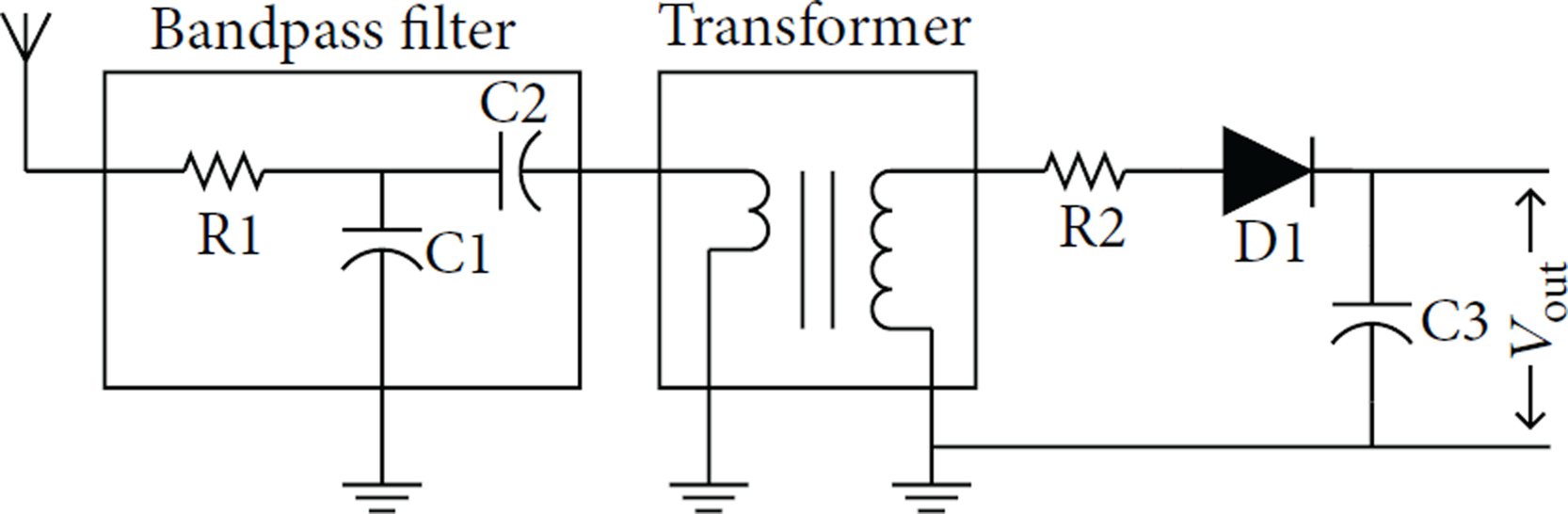
Radio sensor schematic.
4.2. Hardware Architecture of Radio Sensor
The schematic of the radio sensor is shown in Figure 6. The radio sensor designed here does not need any power supply for its operation [7]. The designed hardware first collects and stores energy from the radio signals and generates the sufficient output voltage to interrupt the node. The resistor R1 and the capacitors C1 and C2 form a bandpass filter filtering out the radio frequencies different from the wake-up signal frequency and preventing the false alarms. The resistance of R1 and the capacitance of C1 and C2 depend on the property of the antenna and the wake-up signal. A step-up voltage transformer is added to boost the input voltage received from the antenna. The transformer increases the peak voltage of the received signal to a certain level making it easier to reach the required threshold voltage for triggering an interrupt. Resistor R2 is for impedance matching preventing the circuit from reflecting back the received signal. Furthermore, in case the instantaneous signal is not sufficient to drive the interrupt, the capacitor C3 is added to the circuit to store energy over a period of time and drive the interrupt when sufficient energy is accumulated on the capacitor. The circuit requires some time; that is, few milliseconds are needed to accumulate sufficient voltage to trigger interrupt.
5. Overview of Proposed Protocol
The proposed PSMAC has been designed to deliver continuous, periodic, aperiodic, and emergency data supporting diverse QoS requirements of M2M energy efficiently along with the support of mobility. In this section, we discuss how IEEE 802.15.4 is analyzed and how a new MAC protocol is developed fulfilling all of the requirements of M2M network.
5.1. Superframe Structure
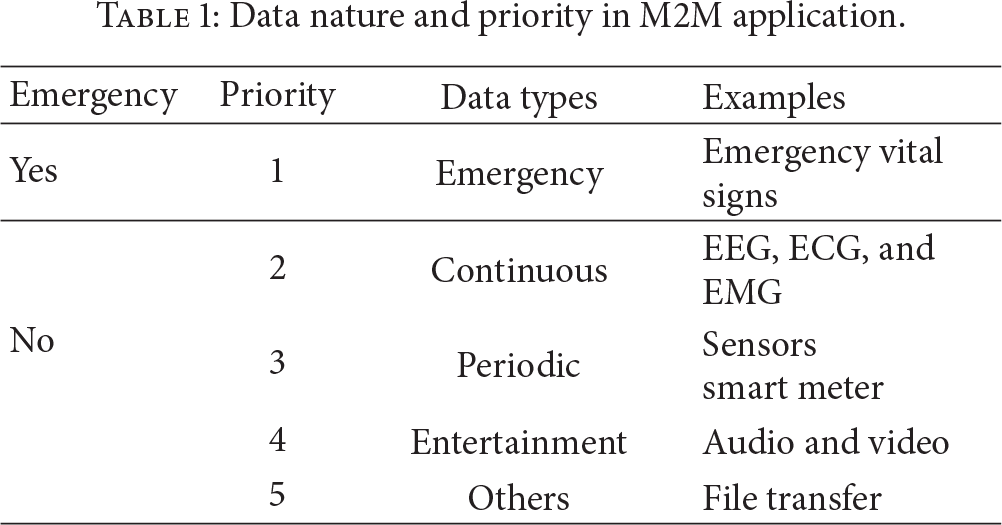
In order to support all data types of Table 1, PSMAC combines both contention-based and contention-free schemes keeping priority intact. Figure 7 shows the format of the superframe defined by the coordinator. A superframe consists of mainly four periods: SP, CAP, beacon period (BP), and CFP. To avoid the periodic wake-up for synchronization and to support mobility, we introduced SP. CFP is divided into TDMA slots of equal length called dedicated time slot (DTS) for handling continuous data. Any device requesting for DTS or wishing to communicate during the CAP competes with other devices using the CSMA-CA mechanism. All transactions are completed by the time of the next network BP. Nodes are assigned DTS during CFP and notified through the beacon. However, the unused DTSs form the inactive period during which both the coordinator and nodes can sleep. All contention-based transactions are completed before the BP begins. Also, each device transmitting in a DTS ensures that its transaction is completed before the end of the CFP. The structure of this superframe is described by the values of BO and SO. However, BO and SO in PSMAC are totally different than those of IEEE 802.15.4. Here, BO determines the interval of the beacon period from the beginning of the superframe (i.e., the length of CAP), and SO describes the interval at which the coordinator shall transmit its synchronization frames (i.e., the length of superframe) as shown in Figure 7. The structure of superframe is determined by coordinators using (
Data nature and priority in M2M application.

The superframe of the proposed PSMAC.
5.2. Synchronization Period
The superframe begins with the synchronization period, and generally nodes are in sleep state during SP. SP is used for the synchronization of currently associated nodes and for the association of a newly joining node. In our proposed PSMAC scheme, we exploit the channel switching capability of CC2420 radio hardware [23]. A dedicated separate channel called SC is assigned for synchronization. For example, IEEE 802.15.4 has 16 channels (11 through 26) for 2.4 GHz frequency, channel 26 (interference free from 802.11) can be used for synchronization, and the rest are used for communication [24]. At the beginning of SP, coordinator switches to SC and broadcasts the synchronization frame and switches back to its original DC as shown in Figure 8. The synchronization frame consists of basic information of coordinator and superframe such as the network identifier, the communication channel of the M2M, and the lengths of CAP and superframe. Assigning the dedicated channel for synchronization has the following advantages.
Prevention from False Alarm. Only the synchronization frame transmitted in the synchronization channel is capable of activating the radio sensor and triggering the interrupt. Quick Association. Unassociated nodes can learn about neighbors just by listening to the synchronization channel only.

Channel switching mechanism of coordinator in the proposed PSMAC.
The duration of the SP should be long enough to accumulate two consecutive synchronization frames (explained later in Section 5.2.3). The synchronization frame has mainly the following three functions.
5.2.1. Network Initialization
Our intelligent MAC design prevents nodes from scanning each and every available channel for association. When a coordinator is initialized, it performs the passive scan (similar to IEEE 802.15.4) in the SC for the durations of

Flowchart for superframe scheduling in PSMAC.
5.2.2. Node Association
An unassociated node switches its radio channel to SC and performs the passive scan for the duration of
5.2.3. Synchronization
SF causes radio sensor to generate an interrupt. Multiple HANs can coexist, and each coordinator transmits their its SF. But nodes are synchronized by the interrupt received during their SP only and are ignored if the interrupt is received elsewhere. However, it may be possible that SF is lost and node is unable to receive interrupt during its SP. The missing of interrupt has to be handled separately for the following two cases.
When When
Although nodes are synchronized only by the interrupts received during their SP, some interference from the unwanted signal may trigger the interrupt during SP. Thus, to avoid false synchronization, nodes receive beacon (for
Thus, by introducing the SP, now the nodes can continue to sleep until they need to transmit data. But this implementation may prevent the coordinator from communication with the nodes because the nodes are skipping the beacons. The situation has been cleverly handled with the following technique. If a coordinator wants to communicate with a sleeping node, it transmits two consecutive SFs interrupting nodes two times. Whenever a node is interrupted two times during its SP, it must wake up immediately. Thus, the particular node can be reached.
5.3. Communication
The data communication is done in both CAP and CFP periods. CAP is used for periodic data, emergency alarm, and command frames. CFP is used for continuous data, that is, when nodes have to transmit in every superframe. The nodes intending to transmit during CAP use prioritized CSMA/CA algorithm for channel access. During CAP, the coordinator collects DTS requests and allocates DTS based on the priority. The coordinator assigns first available slot to the highest-priority data. The coordinator broadcasts a beacon in the BP. The beacon is used for synchronizing all of the network nodes and notifying DTS allocation status. The length of a DTS slot should be long enough to transmit a data frame and receive an ACK. The total number of DTSs supported is more than 7 and depends on value of BO and SO. A single node can be given one or more DTSs depending on its requirement. The assigned DTS remains with the node until and unless coordinator or node explicitly cancels it. However, if all DTSs are exhausted, higher-priority data can preempt lower-priority data. Thus, every node with DTS must verify its DTS and its position through beacon.
Only the devices waiting for communication have to wake up to receive the beacon from the coordinator. When the coordinator wants to send data to a sensor, it allocates DTS and notifies through the beacon. The designated sensor listens in the assigned time slot to receive the data and replies with the ACK ending the process. A node sends periodic or emergency data during the CAP and continuous data in CFP using DTS. After receiving the data frame, the coordinator replies with the ACK frame. The transceiver is active only during the communication and, for the remainder of the time, is in sleep mode for power saving.
6. QoS Features and Analysis
6.1. Association
Let aBaseSuperframeDuration be the number of symbols forming a superframe when 

6.2. Data Priority and Transmission Delay in CAP
Priority of data is determined by the degree of their importance and is divided into different priority classes as summarized in Table 1. However, in practice, the priority classification should accommodate application requirements.
From Figure 11, the packet transmission delay, 

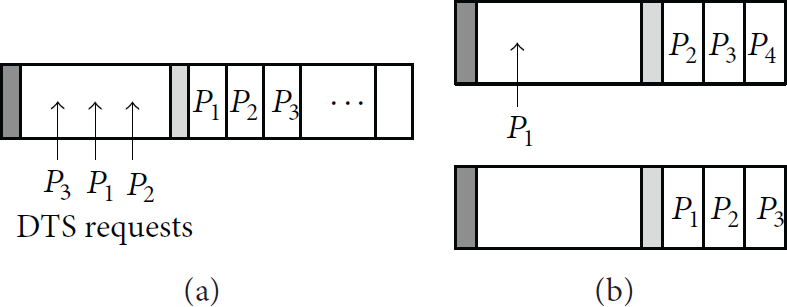
6.3. Prompt DTS Allocation and Scheduling
For real-time applications, assuring data delivery on time and initiating data transmission immediately after sensor deployment are the most important issues. As shown in Figure 7, the positions of SP and BP enable a device to quickly get associated with a coordinator and immediately request DTS allocation during CAP. Then, the coordinator allocates DTS, and the device transmits data in its assigned TDMA slot. Unlike IEEE 802.15.4, all of these processes are done in sequence and within one superframe interval. The comparison of allocation delay between proposed and IEEE 802.15.4 is shown in Figures 10(a) and 10(b) and derived as


Delay associated with DTS allocation.

Transmission delay for CAP.
The coordinator collects the DTS requests and serves the highest-priority data first. The coordinator sorts all the requests and allocates higher priority first from the first available slot as shown in Figure 12(a). If remaining DTSs are insufficient to admit all requests, higher-priority data preempt lower-priority data as shown in Figure 12(b).
Priority-based DTS allocation.
7. Performance Evaluation
The simulation analysis is performed using network simulator NS-2. Nodes are deployed in a 500 m × 500 m field as shown in Figure 13. Eight end devices form the star topology with a coordinator in the center. In all the simulation, SO is the same as BO (for IEEE 802.15.4), whereas the CAP, CFP, and superframe of PSMAC were set the same as with IEEE 802.15.4. Unless mentioned, the superframe of PSMAC is made the same as with IEEE 802.15.4 with
Network parameters and values.

Network topology used in the simulation.
7.1. Association Time
Figure 14 shows the network initialization time and the node re/association times for various values of BO obtained from NS-2 simulations. In IEEE 802.15.4, the PAN coordinator performs the passive scan in all available channels, but in PSMAC only SC is scanned. Thus, the network initialization time is shorter in PSMAC. As shown in the figure, the time required by PSMAC for re/association is much lower because only the SC is scanned for the association procedure. However, in the case of IEEE 802.15.4, it scans all available 16 channels spending significant amount of time and energy. Also, from the figure, we can see that the time required for both re/association is the same for PSMAC because there is no orphan scan, and the same passive scan procedure is used for both re/association. At

Total time spent for association.
7.2. Energy Consumption
The energy saving achieved by PSMAC was studied by performing various experiments. The simulation results showed that, in the heavy traffic, IEEE 802.15.4 and PSMAC have comparable energy consumption. However, in low traffic, the energy saving by PSMAC becomes significant. Energy consumption obtained by varying the upload traffic is shown in Figure 15. The message inter-arrival period of 0 implies no data upload at all and interarrival period of 1 implies that data are uploaded once in every second. As seen from Figure 15, PSMAC consumes the least energy when nodes have no data to upload because nodes in PSMAC do not need to wake up in every superframe if there is are data. In the case of absence of data traffic, PSMAC saved the energy consumption by 13.85 times as compared to IEEE 802.15.4. The skipping of beacons accounts for the energy saving. We observed that the lesser the data traffic is, lesser the energy consumption in the case of PSMAC is.

Average energy consumption.
7.3. Latency
Figure 16 shows DTS allocation delay, which is the time duration from the data generation to the confirmation of DTS via beacon. For this analysis, superframes of both protocols were divided into 16 slots, while slot 0 and slot 8 were allocated for beacon positions of IEEE 802.15.4 and PSMAC, respectively. The graph shows allocation delays, while data generation time is moving from slot 1 toward slot 16 of superframe. As observed in Figures 10(a) and 10(b), slot allocation in IEEE 802.15.4 is not confirmed until the next BP. However, PSMAC enables fast allocation just after CAP as well as prompt transmission within current superframe. In both cases, delay becomes the worst when the data are generated right after CAP because a node has to wait for the next CAP for allocation request. In this analysis, we observe that PSMAC reserves DTS almost twice faster than IEEE 802.15.4.

Latency experienced in slot allocation.
Figure 17 shows the average transmission delay and average maximum delay when nodes with the emergency data contend during CAP. In this simulation, all of the end devices (Figure 13) were given the same constant bit rate (CBR) traffic, except that node 6 generated 10 emergency packets during the simulation of 600 secs. The CBR traffic is varied from the message interval of 0.2 to 1 sec. In PSMAC, an emergency node has a high probability to choose short backoff duration, resulting in low-access delay. The latency of emergency data was decreased by 50% in PSMAC as compared to IEEE 802.15.4.

Latency experienced in emergency traffic.
7.4. Association Success Rate and Throughput
To observe how PSMAC handles mobility, a simulation was performed. In this simulation, a BS, 8 coordinators, and one mobile node are used as shown in Figure 18. Nodes are placed 40 m away from each other, and the arrow heads indicate the direction of movement of the mobile node. In the simulation time of 100 secs, node 9 starts data transmission at the rate of 4 Kbps. In the simulation time of 110 secs, node 9 starts to move while transmitting data and stops when it reaches its original position. The simulation environment simulates a person walking in a building. Success rate of association is calculated as the ratio of successful associations to the total number of possible associations. In our simulation model, there were total 8 associations possible before the mobile node comes to rest. PSMAC increases the successful association rate of a mobile node by providing quick passive discovery of a coordinator. Percentage of successful associations at different BO(s) and node speeds are shown in Figure 19. We observed that, in case of IEEE 802.15.4, even a slight mobility has a significant negative impact on association. At the human walking speed of 1.5 m/s, IEEE 802.15.4 has poor success rate of association even at the lower values of BO, and at
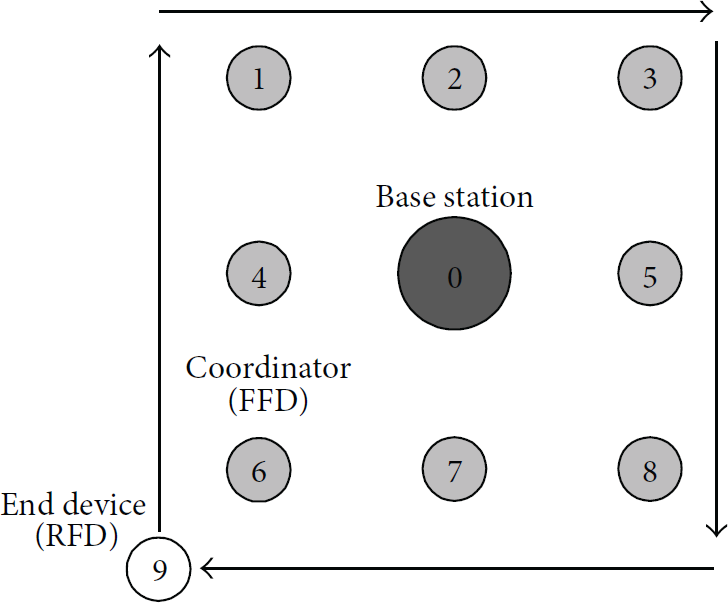
Network topology used for the mobile environment.
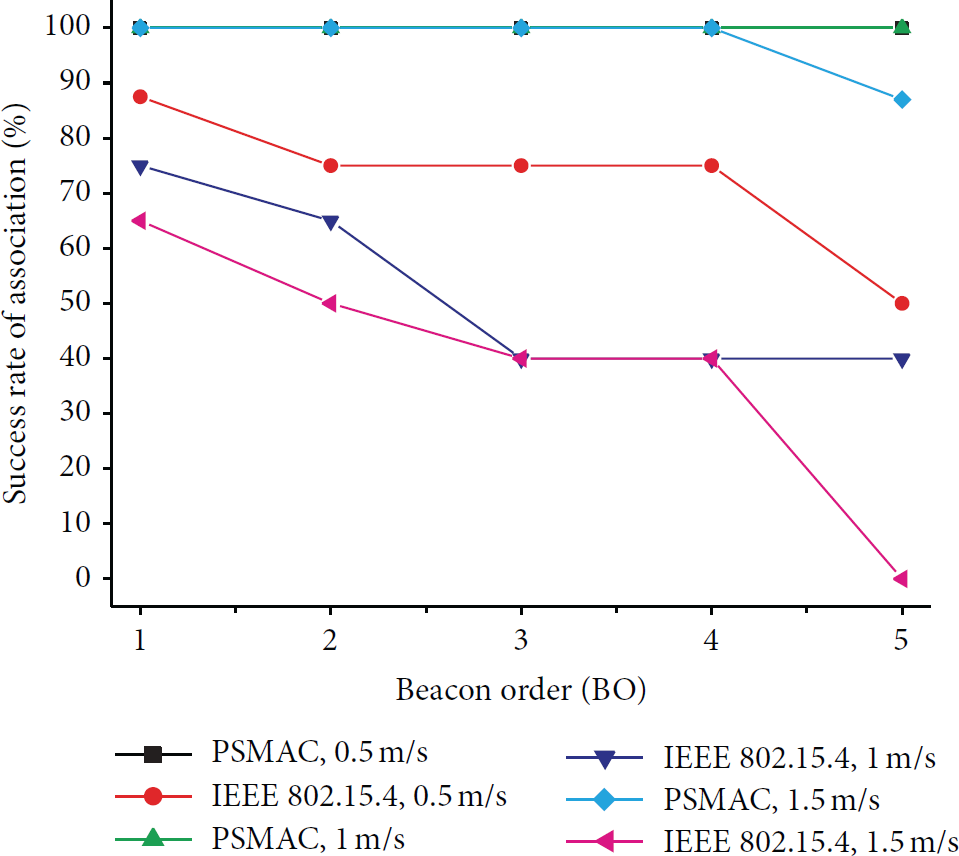
Association success rate at 0.5, 1, and 1.5 m/s.
The effect of cell change on throughput observed at the BS when

Throughput observed at mobility of 1.5 m/s, data rate of 4 Kbps, and
8. Conclusion
In this paper, we proposed PSMAC that supports diverse QoS along with mobility, but with minimal power consumption. PSMAC uses two separate channels: synchronization channel and data channel. Synchronization period is added in the superframe during which coordinators change their radio channel to the synchronization channel and broadcast the synchronization frame. A radio-triggered hardware attached to node, tuned to be activated by the synchronization frame only, synchronizes the nodes in their sleep state and conserves energy. Similarly, nodes can learn about neighbors by just scanning the synchronization channel which enables fast association. Furthermore, by positioning the beacon period after the contention access period, PSMAC provides fast and preemptive slot allocation that can handle diverse QoS requirements. Our simulation results demonstrated that our protocol is highly energy efficient, takes less time for association, supports diverse QoS, and also has low latency, which can be adapted for various M2M applications.
Footnotes
Acknowledgment
This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Republic of Korea Government (MEST) (no. 2011-0013062).