
Abstract
Foreign object debris (FOD) would potentially cause huge damage when it appears on the airport runway, so the FOD surveillance system is one of the essential protectors for airplane's safety now. This paper introduces a designed method of airport runway FOD detection system based on WSN, analyzes function of various image acquisition sensors, and introduces FOD image analysis algorithm. Finally WSN data fusion technology is used to analyze the FOD image.
1. Foreword
What is FOD? FOD is the abbreviation of foreign object debris, which refers to a foreign substance that may damage the aircraft system. There are many types of FOD, such as connecting pieces between aircraft and engine, flying objects, wild animal, leaves, sand, and stone. FOD is very harmful to the aircraft. For example, Air France Concorde crash in July 25, 2000 caused by FOD killed 113 people. The crash created by FOD took research of FOD automatic, fast, and accurate monitoring and alarm system on the agenda. This further proved that an effective safety airport runway intelligent detection system is an important part of the airport flight safety system. Nowadays, there are four typical systems in the world, the British Tarsier system (Figure 1(a)), FOD Detect detection system of Israel (Figure 1(b)), FOD Finder monitoring system (Figure 1(c)), and iFerret monitoring system (Figure 1(d)) [1–4].
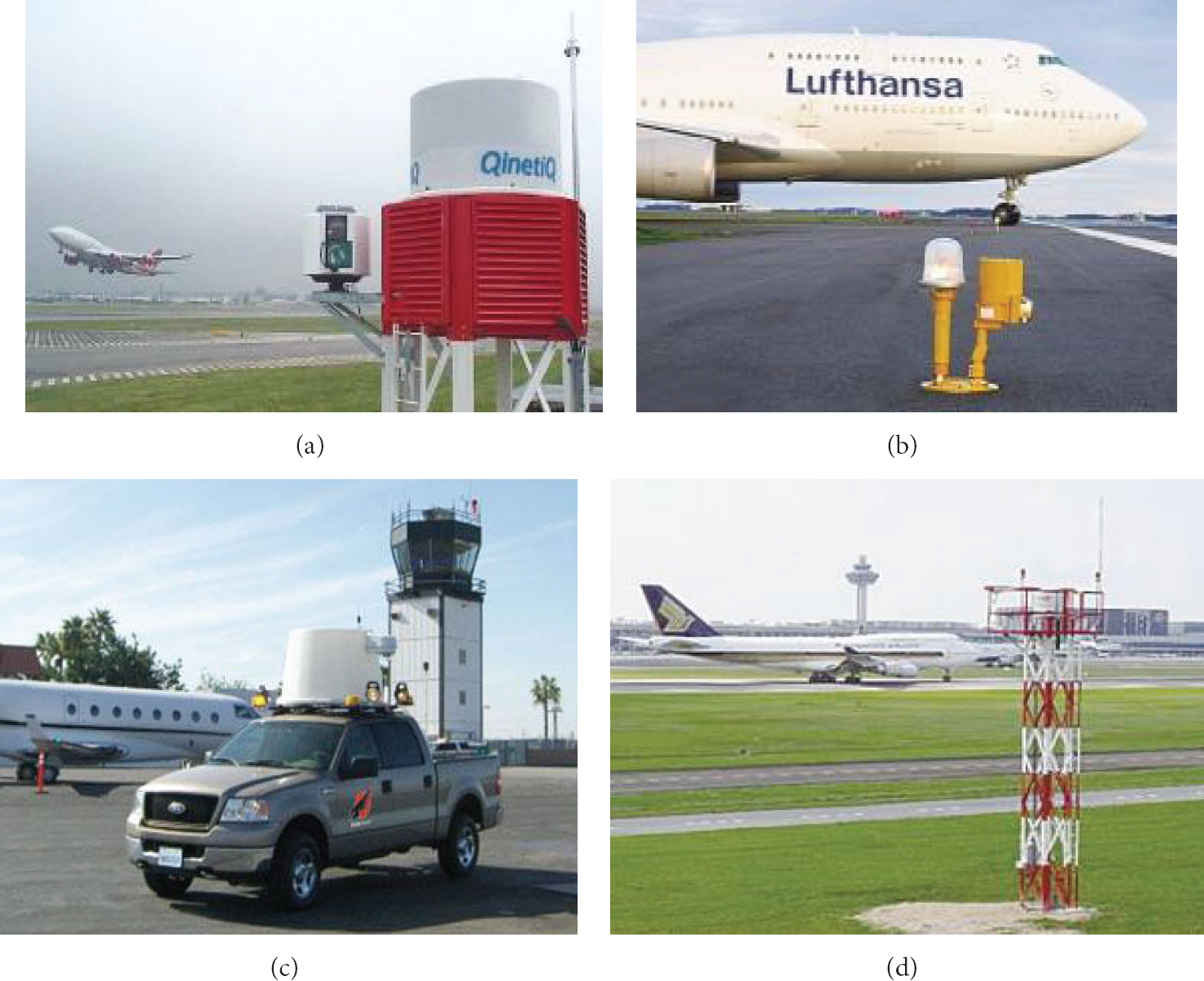
(a) Tarsier system. (b) FOD Detect detection system. (c) FOD Finder monitoring system. (d) iFerret monitoring system.
At present, most of the domestic airports are still using manual method which is neither efficient nor safe. China has not yet found the radar system on FOD monitoring. Current research methods for detecting runway FOD are mainly for image processing on the runway image to realize the detection and localization of FOD.
This paper introduces the design of a runway detection system based on WSN. The main purpose of this design is to conduct real-time detection, recognition, and tracking of track target, for the general sensors are unable to achieve this goal. In this design, the radar sensor, visible light cameras, infrared cameras, and laser ranging technology are used to further analyze the grade of target threat and the position of the FOD. In addition, the system uses multiple sensors to detect, so we use the sensor data fusion technology. This design is both innovative and practical.
2. Construction of System Model
2.1. The Basic Function of the System
According to the needs of real-time detection of airport runway FOD, FOD detection system should have the following basic functions.
The runway should be detected 24 hours in all cases, regardless of the weather and the limitation of light. It can detect the damage level and the specific location of FOD and sends out alarm signals correspondingly. Information detected can be sent to the airport runway information database and recorded for query.
2.2. The System Structure Diagram
As the showing of Figure 2, the overall framework of airport runway detection system designed in this paper is to use the data server, data monitoring device, FOD processing information station and sensing data terminal and communication network to exchange information. First, the communication network receives information from each module and processes the received information. And then, it feeds back to each module and completes the specific process of FOD detection. At last, the content of the event is sent to the database.

The system structure diagram.
2.3. The Work Flow of the System
Turn on the system; staffs take their place; start the hardware and software system self-check. Millimeter wave radar began to carry on the omnidirectional real-time scanning of the runway. Radar scans to find the FOD and alarm. Optical camera began to take pictures of FOD, judge the harm degree, and send the location information of the FOD. Monitor center receives information and judge whether to remove. If the optical camera failed to identify, the manual inspection should be adapted. After receiving removal instructions, the staff began to clean foreign body, upload information to the monitor data center, and record the information.
3. The Sensor System
3.1. Millimeter Wave Radar
Millimeter wave radar usually works in the frequency range of 30 to 300 GHz. The main function of millimeter wave radar is to scan the runway in the automatic inspection uninterrupted state all day and sound the alarm in the detection of FOD [5]. Then send the detected information to optical camera.
3.2. Optical Camera
Optical camera system is composed of visible light camera and an infrared thermal imager. Its main function is to shoot picture of the target after receiving distance coordinate signal of airport runway FOD given from the millimeter wave radar system [6].
Visible light camera is mainly used for photographing in illumination and better weather conditions. FOD target environment image and FOD accurate target image are very important for the detection and identification of targets. Therefore visible light cameras can take both the whole scene image and local fine image features by selecting the zoom capability lens.
3.3. Laser Range Finder
Airport FOD detection uses laser range finder to fix the target location. When visible light camera and infrared camera scan the object and send out the alarm signal, laser range finder measures the distance of the object and determines the exact location of FOD at the same time.
3.4. Photoelectric Encoder
Photoelectric encoder is a binary photoelectric position indicator. It is composed of light source, the encoder, and a photoelectric receiver. Airport runway detection uses photoelectric encoder to determine the angular position for more accurate position of FOD.
3.5. Data Fusion Device
FOD detection uses data fusion for information processing. The data fusion center fuses the information from multiple sensors and can also fuse the observed facts from multiple sensor information and the man-machine interface. If finds foreign objects and extract information, makes an alarm signal and send it to the monitoring center or runway staff, then process and record information.
4. Airport Runway Detection Algorithm
According to the analysis of airport runway detection system, FOD detection is very important. Detection algorithm of image objects is the priority among priorities in the algorithm design process. Therefore, in order to accurately locate and recognize the position of FOD, we will use several kinds of algorithms to analyze this problem.
4.1. Analysis and Comparison of Image Segmentation Algorithms
4.1.1. Image Edge Detection Algorithm Based on the Canny Operator
(1) The basic principle of Canny edge detection: the first-order differential filter can filter out the noise and keep the edge characteristic. Noise filter is a derivative of arbitrary direction of 2D Gauss function [7, 8]. Filtering method is carried out through the convolution with the image; image edge is determined by the local maximum image gradient on the filtered image.
(2) Theoretical basis: Canny gives 3 indexes of edge detection performance evaluation [9]. High signal to noise ratio. The mathematical expression of the signal-to-noise ratio (SNR) is
The boundary filter impulse response is
High positioning accuracy: in order to increase the positioning accuracy, edge detection is less than the actual distance of edge point. Mathematical expressions of positioning accuracy are
The first-order derivatives of
Single edge response means that one response corresponds to only one edge points, which reduces the probability of false edges appearing. Detection of average distance

Set 2D Gauss function

(3) The advantages of Canny operator detection method [10] are as follow:
the low bit error rate; the high positioning accuracy; the high false edge inhibition rate.
(4) There are some possible defects in the following aspects when the Canny operator detects the edge of the runway.
The Canny operator uses the Gauss filter for image smoothing, airport runway background image illumination changes, and Gauss filter coefficient is difficult to determine. So detection of airport runways is instable. Localization of Canny operators on the edge is more accurate, but it is too sensitive to noise, the brake marks and runway centerline at the airport runway background image are likely to be mistaken for the wrong edge information. The high and low threshold parameters of Canny algorithm is set artificially, so it is not adaptive. High and low threshold setting have a great influence on the result of edge detection.
The existence of these problems may affect the effect of the application of Canny algorithm in detecting FOD in the airport runway, but for many years, the image in different areas, different characteristics, and many scholars put forward many improved algorithms about Canny operator. According to the characteristics of the airport runway background image, using adaptive double threshold method will get a good effect on the airport runway edge detection by improved Canny operator.
4.1.2. Runway Edge Detection Algorithm Based on Hough Transform
(1) Runway Edge Detection Algorithm. Detection of airport target in remote sensing images often needs to extract straight lines corresponding to the runway; therefore we use Hough transform. Hough transform is a commonly used line detection method. It has the advantages of detection and effective recognition on the target, being not sensitive to noise, and so forth. Because it has these advantages, it has been fully utilized in the detection of airfield runway. The disadvantage of the Hough transform is that the computation is very large, so it is limited in application. In order to solve this problem, people have improved algorithm. In this paper, using the phase information of straight to reduce the total computation of Hough transform greatly has achieved remarkable effect.
(2) The Principle of Hough Transform Line Detection. Hough transform is an effective treatment on linking and finding the line segments in the image. The basic idea is to establish a correspondence of “line-point” between image space and parameter space and turn the straight detection problem in image space into the parameter space point detection problem. There are two kinds of parameter spaces commonly used in the Hough transform. One kind is slope intercept parameter space; the other kind is the polar parameter space. In the establishment of parameter space with the slope a and intercepts b of the line, every point on the line
The commonly used method of Hough transform line detection is the use of the following formula to establish duality transformation between image space and the polar coordinate space:

In order to detect the line composed of nonzero point in rectangular coordinate system, the ρ should be discretized into
This method is called the standard Hough transform method. It has the advantage that range θ and ρ in the parameter space is limited, no matter how changes in line. So the line detection methods are basically based on this method at present. But this method has the disadvantages of needing large amount of calculation and a large storage space in case of larger values of N.
The runway detection algorithm does not require the straight line extraction of high resolution in the airport runway region segmentation. But the white airport runway central line and the black tire skid marks must be removed effectively. Therefore, the improved algorithm should have better judgment on collinear line segments belonging to the airport runway boundary or interference line. Moreover, because of real-time requirement, the computational complexity of the algorithm cannot be too high.
5. Application of Data Fusion in the Airport Runway Detection System
5.1. Data Fusion Technology in This System
Multisensor data fusion is a new research field. Practice has proved that compared with the single sensor system, multi sensor data fusion technology can enhance the survival ability, improve the reliability and robustness of the whole system, strengthen confidence, improve the reliability and robustness of the whole system, strengthen confidence, and improve the precision of the whole system, expand the system time, space coverage ratio, spatial coverage in solving detection, tracking, target recognition. Because of this, data fusion technology is widely applied in the field of airport runway detection [11].
People put the information from each sensor for the detection of FOD on the runway together by using data fusion technology and detect the real-time information from surrounding environment of the airport runway.
In the data fusion system of airfield runway FOD detection, the information from sensors has different characteristics: real-time or non-real-time, fast or slow, fuzzy or clear, mutual support or complementary, maybe conflicting or competitive. The basic principle of multisensor data fusion is making full use of the different functions of multiple sensors and division of labor and cooperation between different sensors. In order to explain or describe the object measured congruously, various pieces of information of sensor detection are optimized. Therefore, the data is no longer a single input information but more information and better information from multi sensor. This improves the effectiveness of the entire sensor system [12, 13].
5.2. The Function Model of Data Fusion
Application of data fusion model in different area is different. The ultimate goal of data fusion is realized by four different processing layer levels. Figure 3 shows the signal processing in different fusion level.

Data fusion module.
Layer 1. This layer is the level of processing layer. It fuses the information of position and identity from single sensor, so as to obtain the FOD information of position and identity.
Layer 2. Layer 2 is to describe and explain the current situation, static state and dynamic situation, and the link between events through processing the observation data and a series of events. The data from layer 1 is obtained by layer 2, so we can have more indepth understanding about the FOD and surrounding environment of the airport.
Layer 3. This layer judges the surrounding environment and threatening grade of airport runway FOD and then makes a decision. Threat assessment is different from the situation, because threat assessment will analyze FOD quantitatively in many aspects, so as to determine the position of the FOD.
Layer 4. This layer can be called optimal fusion layer. By modifying the whole process and enabling the efficient use of resources, the sensor can be effectively managed. The main function of this layer is to monitor and evaluate the fusion process and to guide on how to get the data, which can achieve a better fusion result. The processing layer and layers, external system, and system operators have contact.
In the high-level fusion process, we need to use a large database. Quickly adding data and retrieval of this large databases must be realized [14, 15].
The hierarchical model emphasizes the various steps of data fusion processing, rather than computer structure. When processing layer moves from one layer to the other three layers, the model emphasizes the level. Layers of processing, fusion data generated.
6. Conclusion and Future Work
The present study aimed at the airport runway detection system, and we have two directions [5]. On the one hand, FOD single sensor targets detection and recognition in millimeter wave radar system or optical camera system based; On the other hand, combined with the multi-sensor detection system has become the mainstream mode of airport FOD detection, rapid response to FOD target and alarm, reduce the FOD threat to flight safety. This paper designs the airfield runway FOD detection system based on sensor and information fusion technology.
On the basis of this study, there are many aspects worthy of further study on the runway foreign object detection, recognition, and alarm problems.
(1) In this paper, the airport runway detection in SAR complex scenes was done by the image fusion method. But how to better detect the single SAR image in the complex structure of the airport runway still needs further research and exploration.
(2) How to detect and recognize airport runway accurately in real time at the wide range of airport remote sensing image still needs a further study on detection and extraction methods of remote sensing images in the long straight road.